Изобретение относится к измерительной технике и может быть использовано в радиотехнике для определения азимутального и угломестного направлений на источники многолучевых радиосигналов в условиях априорной неопределенности относительно числа лучей, поляризационных и пространственных параметров радиосигналов, шумов и помех.
Многолучевое распространение радиоволн представляет серьезную проблему при определении углов прихода и приводит к возникновению больших ошибок оценивания местоположения источника излучения.
Достижение теоретически предельной точности пространственной локализации источников радиоизлучений в условиях многолучевого распространения радиоволн с неизвестным числом лучей ограничивается существенной априорной неопределенностью относительно параметров радиосигналов и несовершенством известных способов их обработки. Известные способы в настоящее время, как правило, не определяют число лучей падающего поля и не учитывают при их селекции на фоне шумов и помех все возможные физические признаки радиосигналов: поляризационные, пространственные, временные (частотные) или корреляционные (определяемые формой сигнала).
Технологии пространственной локализации, учитывающие поляризацию радиосигналов, не получили достаточного распространения, несмотря на то, что при различии сигналов отдельных лучей многолучевого поля по поляризации появляется возможность разделения лучей даже в случае совпадения направлений их прихода.
Известен способ пространственной поляризационно-чувствительной локализации источников многолучевых радиосигналов [1], включающий
прием радиосигналов неизвестной поляризации малобазовой антенной решеткой, состоящей из магнитных антенн с совмещенными фазовыми центрами,
формирование ансамбля радиосигналов, зависящего от времени и номера антенны,
синхронное преобразование ансамбля принятых радиосигналов в цифровые сигналы,
преобразование цифровых сигналов пар противоположных антенн в комплексные квадратурные составляющие дипольного и квадрупольного выходных сигналов,
получение информации о направлении прихода радиосигналов по разности фаз сигналов квадратурных составляющих дипольного и квадрупольного выходных сигналов.
Данный способ обеспечивает повышенную устойчивость к поляризационным ошибкам. Однако этот способ относится к классу способов малобазового пеленгования, что является принципиальным ограничением на пути достижения потенциально возможных точностей пеленгования многолучевых радиосигналов с неизвестной поляризацией.
Известен способ пространственной поляризационно-чувствительной локализации источников многолучевых радиосигналов [2], свободный от этого недостатка и принятый за прототип. Согласно этому способу:
1) принимают многолучевой радиосигнал многоэлементной антенной решеткой и формируют ансамбль радиосигналов, зависящих от времени и номера антенного элемента;
2) синхронно преобразуют ансамбль принятых радиосигналов в цифровые сигналы;
3) из цифровых сигналов получают сигнал комплексного амплитудно-фазового распределения (АФР)  описывающий распределение амплитуд и фаз принятого радиосигнала на элементах решетки;
описывающий распределение амплитуд и фаз принятого радиосигнала на элементах решетки;
4) запоминают сигнал измеренного АФР 
5) преобразуют сигнал измеренного АФР  по алгоритму псевдообращения в сигнал комплексного углового спектра
по алгоритму псевдообращения в сигнал комплексного углового спектра

где  - сигнал комплексной фазирующей функции, описывающий возможные направления прихода сигнала от каждого потенциального источника на заданной частоте приема,
- сигнал комплексной фазирующей функции, описывающий возможные направления прихода сигнала от каждого потенциального источника на заданной частоте приема,  - сигнал, эрмитово сопряженный с
- сигнал, эрмитово сопряженный с 
6) используют сигнал  в качестве начального приближения, а так же итерационно формируют зависящие от предыдущего решения взвешивающие сигналы
в качестве начального приближения, а так же итерационно формируют зависящие от предыдущего решения взвешивающие сигналы

- m-й элемент вектора  , ε - малое число, k=1,2,… - номер итерации, и сигнал очередного приближения углового спектра
, ε - малое число, k=1,2,… - номер итерации, и сигнал очередного приближения углового спектра
до тех пор, пока энергия разности сигналов текущего и запомненного предыдущего угловых спектров не достигнет заданного малого значения;
7) после чего по локальным максимумам спектра мощности текущего углового спектра определяют азимуты α и углы места β выделенных лучей.
Способ-прототип реализует достаточно эффективный способ пеленгования, предусматривающий формирование распределения энергии многолучевых радиосигналов по пространству с повышенной разрешающей способностью. Однако данный способ ориентирован на обработку электромагнитного поля заданной поляризации, определяемой типом антенного элемента, например, горизонтально или вертикально расположенными электрическими вибраторами. При этом комплексная фазирующая функция описывает возможные направления прихода сигнала от каждого потенциального источника на заданной частоте приема и не зависит от поляризации пеленгуемых радиосигналов, что следует из выражения для ее n - ой составляющей

где rn, zn, αn - цилиндрические координаты n - ой антенны решетки, m - номер узла сетки наведения по азимуту α и углу места β, λ - длина волны, соответствующая заданной частоте приема.
Изменение ожидаемой поляризации пеленгуемого радиосигнала, например линейной вертикальной (при использовании вертикально расположенных электрических вибраторов) на круговую, приводит к потере чувствительности способа-прототипа на 3 дБ. Однако при пеленговании сигналов неизвестной поляризации способ-прототип, ориентированный на обработку электромагнитного поля определенной поляризации, дает большие погрешности пеленгования в случае, если поляризационные характеристики антенн пеленгационной решетки не согласованы с поляризацией падающих волн или антенны решетки расположены вблизи отражателей, которые могут изменить поляризацию. В связи с этим учет поляризации является необходимым условием для получения точных результатов пеленгования в сложных условиях многолучевого распространения радиоволн и при размещении антенной решетки пеленгатора на подвижных платформах (например, автомобилях, кораблях, самолетах).
Техническим результатом изобретения является повышение эффективности (точности и информативности) пространственной локализации источников многолучевых радиосигналов в условиях априорной неопределенности относительно лучевой структуры, поляризационных и пространственных параметров радиосигналов, шумов и помех.
Повышение эффективности пеленгования достигается за счет: расширения поля физических признаков радиосигналов, используемых при поляризационно-чувствительной локализации многолучевого поля с неизвестным числом лучей на фоне шумов и помех,
использования обобщенного критерия формы волнового фронта, предусматривающего проверку степени близости формы принятого и модельных многолучевых волновых фронтов с учетом поляризации, в качестве признака достоверности поляризационно-чувствительной локализации источников многолучевого поля с неизвестным числом лучей;
применения новых поляризационно-чувствительных операций обработки принимаемых радиосигналов, обеспечивающих благодаря согласованию принятого многолучевого радиосигнала и многолучевой фазирующей функции определение числа лучей, направлений прихода и вида поляризации каждого луча локализуемых радиосигналов.
Технический результат достигается тем, что в способе пространственной поляризационно-чувствительной локализации источников многолучевых радиосигналов, заключающемся в том, что принимают многолучевой радиосигнал многоэлементной антенной решеткой и формируют ансамбль радиосигналов, зависящих от времени и номера антенного элемента, синхронно преобразуют ансамбль принятых радиосигналов в цифровые сигналы, из цифровых сигналов получают сигнал комплексного амплитудно-фазового распределения (АФР) описывающий распределение амплитуд и фаз принятого радиосигнала на элементах решетки, запоминают сигнал измеренного АФР согласно изобретению формируют и запоминают для заданной частоты приема, возможного значения числа лучей в принятом радиосигнале и требуемых узлов сетки наведения по азимуту и углу места поляризационно-зависимые идеальные сигналы многолучевой комплексной фазирующей функции  итерационно увеличивая значение возможного числа лучей и используя соответствующие числу лучей сигналы фазирующей функции
итерационно увеличивая значение возможного числа лучей и используя соответствующие числу лучей сигналы фазирующей функции  преобразуют сигнал измеренного АФР в зависящий от всех возможных направлений прихода лучей многомерный обобщенный сигнал
преобразуют сигнал измеренного АФР в зависящий от всех возможных направлений прихода лучей многомерный обобщенный сигнал
каждый раз определяют значение максимума обобщенного сигнала и соответствующее найденному максимуму значение аргумента, по аргументу находят азимутально-угломестные направления  прихода лучей, а по значениям АФР и максимума обобщенного сигнала
прихода лучей, а по значениям АФР и максимума обобщенного сигнала  определяют нормированный квадрат невязки
определяют нормированный квадрат невязки
измеренного и модельного волновых фронтов, сравнивают значение невязки с порогом и при непревышении порога фиксируют по порядку модели волнового фронта число лучей в принятом радиосигнале и соответствующие каждому лучу азимутально-угломестные направления  выбирают соответствующие найденным направлениям
выбирают соответствующие найденным направлениям  составляющие сигнала комплексной фазирующей функции
составляющие сигнала комплексной фазирующей функции  используя которые преобразуют сигнал АФР в описывающий состояние поляризации сигнал
используя которые преобразуют сигнал АФР в описывающий состояние поляризации сигнал  по которому определяют вид поляризации лучей принятого радиосигнала.
по которому определяют вид поляризации лучей принятого радиосигнала.
Технический результат также достигается тем, что в способе пространственной поляризационно-чувствительной локализации источников многолучевых радиосигналов, заключающемся в том, что принимают многолучевой радиосигнал многоэлементной антенной решеткой и формируют ансамбль радиосигналов, зависящих от времени и номера антенного элемента, синхронно преобразуют ансамбль принятых радиосигналов в цифровые сигналы, из цифровых сигналов получают сигнал комплексного АФР описывающий распределение амплитуд и фаз принятого радиосигнала на элементах решетки, запоминают сигнал измеренного АФР согласно изобретению предварительно до начала приема радиосигналов формируют и запоминают для всех возможных частот приема, возможного значения числа лучей в принятом радиосигнале и требуемых узлов сетки наведения по азимуту и углу места поляризационно-зависимые идеальные сигналы многолучевой комплексной фазирующей функции  и комплексные взвешивающие сигналы
и комплексные взвешивающие сигналы
а при приеме на заданной частоте, итерационно увеличивая значение возможного числа лучей и используя соответствующие числу лучей взвешивающие сигналы  преобразуют сигнал измеренного АФР
преобразуют сигнал измеренного АФР  в зависящий от всех возможных направлений прихода лучей многомерный обобщенный сигнал по формуле
в зависящий от всех возможных направлений прихода лучей многомерный обобщенный сигнал по формуле

каждый раз по значению максимума обобщенного сигнала находят азимутально-угломестные направления прихода лучей, по значениям сигнала измеренного АФР и максимума обобщенного сигнала определяют число лучей в принятом радиосигнале и соответствующие каждому лучу азимутально-угломестные направления, а по значениям сигнала АФР и соответствующим найденным направлениям составляющим сигнала комплексной фазирующей функции получают описывающий состояние поляризации сигнал, по которому определяют вид поляризации лучей принятого радиосигнала.
Это повышает быстродействие формирования обобщенного сигнала и, как следствие, всего цикла пространственной поляризационно-чувствительной локализации источников многолучевых радиосигналов.
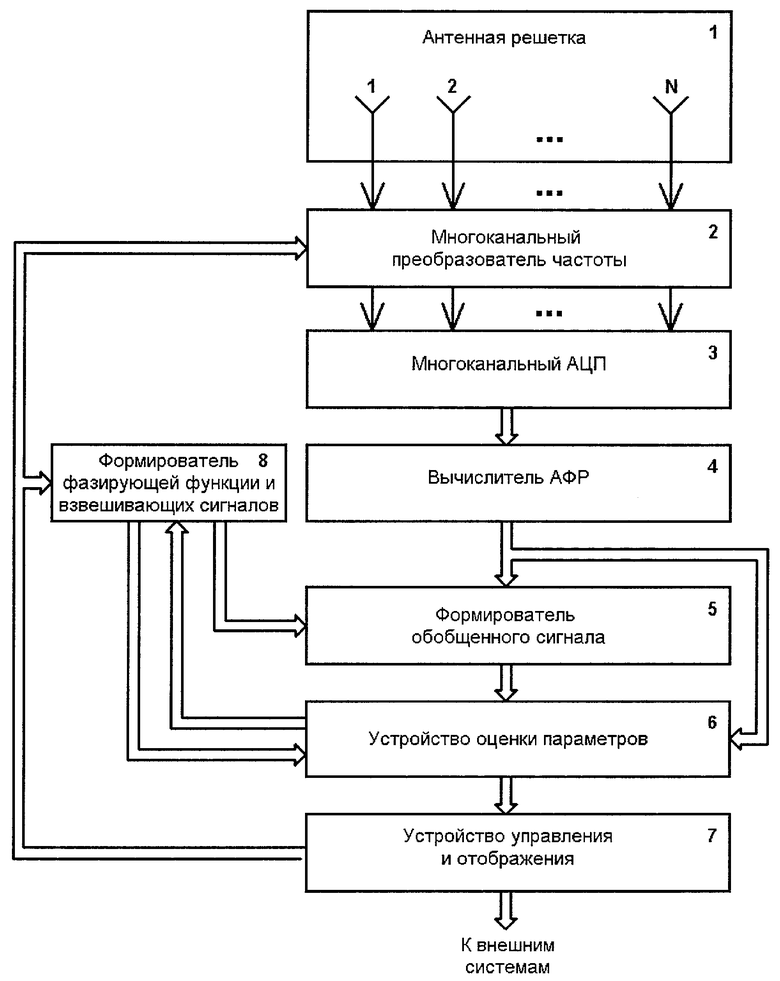
Операции способа поясняются структурной схемой устройства пространственной поляризационно-чувствительной локализации источников многолучевых радиосигналов.
Рассмотрим работу устройства, реализующего способ пространственной поляризационно-чувствительной локализации источников многолучевых радиосигналов.
Устройство, в котором реализуется предложенный способ, содержит последовательно соединенные антенную решетку 1, многоканальный преобразователь частоты 2, многоканальный аналого-цифровой преобразователь (АЦП) 3, вычислитель АФР 4, формирователь обобщенного сигнала 5, устройство оценки параметров 6, устройство управления и отображения 7 и формирователь фазирующей функции и взвешивающих сигналов 8. При этом первый вход формирователя 8 также соединен с входом преобразователя 2, а его выходы подключены к входам формирователя 5 и устройства 6. Кроме того, выход вычислителя АФР 4 также соединен со вторым входом устройства 6. Второй выход устройства 6 подключен к второму входу формирователя 8. Второй выход устройства 7 используется для соединения с внешними системами.
Антенная решетка 1 содержит N антенн с номерами  . Антенная решетка может быть произвольной пространственной конфигурации: плоской прямоугольной, плоской кольцевой или объемной, в частности конформной. Однако для улучшения различения сигналов не только по пространству, но и по поляризации требуется существенное различие поляризационных откликов антенн решетки, то есть антенная решетка должна быть неоднородной (гетерогенной), то есть иметь антенные элементы с отличающимися векторными диаграммами направленности.
. Антенная решетка может быть произвольной пространственной конфигурации: плоской прямоугольной, плоской кольцевой или объемной, в частности конформной. Однако для улучшения различения сигналов не только по пространству, но и по поляризации требуется существенное различие поляризационных откликов антенн решетки, то есть антенная решетка должна быть неоднородной (гетерогенной), то есть иметь антенные элементы с отличающимися векторными диаграммами направленности.
Преобразователь частоты 2 выполнен с общим гетеродином и с полосой пропускания каждого канала, соответствующей ширине спектра радиосигнала. Общий гетеродин обеспечивает многоканальный когерентный прием сигналов. Если разрядность и быстродействие АЦП 3 достаточны для непосредственного аналого-цифрового преобразования входных сигналов, как, например, в KB диапазоне, то вместо преобразователя 2 могут использоваться частотно-избирательный полосовой фильтр и усилитель. Кроме этого преобразователь 2 обеспечивает подключение одной из антенн вместо всех антенн решетки для периодической калибровки каналов по внешнему источнику сигнала с целью устранения их амплитудно-фазовой неидентичности. Возможна калибровка по внутреннему источнику сигнала. При этом может быть использован генератор шума, выход которого также может подключаться вместо всех антенн для периодической калибровки каналов.
Вычислитель 4 содержит N процессоров БПФ, что обеспечивает одновременное вычисление комплексных спектров сигналов, принятых каждой из N антенн решетки, и тем самым - максимальное быстродействие.
Формирователь 5, устройство 6 и формирователь 8, как и вычислитель 4, реализованы по многопроцессорной схеме.
Устройство работает следующим образом.
По сигналу от устройства 7 значение заданной частоты приема поступает в преобразователь 2 и формирователь 8. Преобразователь 2 перестраивается на заданную частоту приема, а в формирователе 8 для заданной частоты приема начинают формироваться и запоминаться поляризационно-зависимые идеальные сигналы многолучевой комплексной фазирующей функции 
 где М - число узлов сетки наведения одного луча.
где М - число узлов сетки наведения одного луча.
Многолучевой радиосигнал на заданной частоте принимается антеннами решетки 1. Принятый каждым антенным элементом с номером n решетки 1 зависящий от времени t многолучевой радиосигнал xn(t) переносится на более низкую частоту в преобразователе 2.
Сформированный в преобразователе 2 ансамбль радиосигналов xn(t) синхронно преобразуется с помощью АЦП 3 в ансамбль цифровых сигналов xn(z), где z - номер временного отсчета сигнала, который поступает в вычислитель 4.
В вычислителе 4 из цифровых сигналов xn(z) формируется и запоминается сигнал комплексного амплитудно-фазового распределения (АФР)  описывающий распределение амплитуд и фаз принятого радиосигнала на элементах решетки.
описывающий распределение амплитуд и фаз принятого радиосигнала на элементах решетки.
Формирование сигнала измеренного АФР возможно применением ряда известных алгоритмов цифровой обработки сигналов во временной и частотной областях. При использовании, например, корреляционно-интерферометрического алгоритма выполняют следующие действия [3]:
- формируют сигналы комплексных спектральных плотностей  цифровых сигналов xn(z), где Ft{…} - оператор дискретного Фурье-преобразования по времени, ℓ - номер дискреты по частоте, 1≤ℓ≤L;
цифровых сигналов xn(z), где Ft{…} - оператор дискретного Фурье-преобразования по времени, ℓ - номер дискреты по частоте, 1≤ℓ≤L;
- перемножением и усреднением сформированных спектральных плотностей  и комплексно сопряженной спектральной плотности
и комплексно сопряженной спектральной плотности  сигнала, измеренного на опорной антенне решетки с номером n=1, формируют сигнал измеренного АФР в виде комплексного вектора
сигнала, измеренного на опорной антенне решетки с номером n=1, формируют сигнал измеренного АФР в виде комплексного вектора
где (·)* - означает комплексное сопряжение.
Отметим, что в результате данной операции обеспечивается сжатие спектра радиосигнала по частоте. В результате, энергия сигнала, распределенная в полосе частот приема, сворачивается в одну спектральную составляющую, чем обеспечивается повышение отношения сигнал/помеха.
Описанные операции могут рассматриваться как операции частотной и корреляционной селекции радиосигналов.
Сформированный сигнал измеренного АФР поступает в формирователь 5 и устройство 6, где запоминается.
Одновременно в формирователе 8 для заданной частоты приема, возможного значения числа лучей К в принятом радиосигнале и требуемых узлов сетки наведения по азимуту  и углу места
и углу места  где
где  - номер узла сетки для К лучей,
- номер узла сетки для К лучей,  - номер узла одного луча,
- номер узла одного луча,  - номер луча, формируются и запоминаются поляризационно-зависимые идеальные сигналы многолучевой комплексной фазирующей функции .
- номер луча, формируются и запоминаются поляризационно-зависимые идеальные сигналы многолучевой комплексной фазирующей функции .
Например, для случая двух лучей К=2 получаем, что индексы первого луча m1 и второго луча m2 независимо друг от друга пробегают значения m1=1,…,М и m2=1,…,М, а номер узла двумерной сетки ϑ пробегает значения ϑ=1,…,М2.
Идеальные сигналы представляют собой матрицы

размером N×2K. Элементы матрицы - есть векторы-столбцы

и
полученные для поля одного падающего с m-го, 
 направления с горизонтальной
направления с горизонтальной  и вертикальной
и вертикальной  поляризациями. Сигналы
поляризациями. Сигналы  и
и  могут быть получены аналитически. Например, при определении углов прихода пеленгуемых сигналов в форме плоской волны соотношение для составляющих сигнала
могут быть получены аналитически. Например, при определении углов прихода пеленгуемых сигналов в форме плоской волны соотношение для составляющих сигнала

имеет следующий вид:

где  - комплексный отклик на горизонтальную (q=h) или вертикальную (q=v) составляющую падающего поля n - ой антенны решетки относительно системы координат, связанной с фазовым центром антенны, rn,zn,αn - цилиндрические координаты антенн решетки, λ - длина волны, соответствующая заданной частоте приема. Полагая в последнем соотношении rn=r, zn=0, получаем частный вид элементов матрицы идеального сигнала для случая плоской кольцевой антенной решетки.
- комплексный отклик на горизонтальную (q=h) или вертикальную (q=v) составляющую падающего поля n - ой антенны решетки относительно системы координат, связанной с фазовым центром антенны, rn,zn,αn - цилиндрические координаты антенн решетки, λ - длина волны, соответствующая заданной частоте приема. Полагая в последнем соотношении rn=r, zn=0, получаем частный вид элементов матрицы идеального сигнала для случая плоской кольцевой антенной решетки.
В сложных условиях размещения антенной решетки пеленгатора, например на подвижных платформах (автомобилях, кораблях, самолетах), более предпочтительным способом формирования сигналов многолучевой комплексной фазирующей функции является применение электродинамической модели радиопеленгатора [4].
Сформированные в формирователе 8 сигналы  комплексной фазирующей функции поступают в формирователь 5.
комплексной фазирующей функции поступают в формирователь 5.
В формирователе 5, итерационно увеличивая значение возможного числа лучей К, то есть при значениях числа лучей К=1, К=2 и т.д., и используя соответствующие числу лучей К сигналы фазирующей функции,  поступившие от формирователя 8, преобразуется сигнал измеренного АФР в зависящий от всех возможных направлений прихода лучей многомерный обобщенный сигнал
поступившие от формирователя 8, преобразуется сигнал измеренного АФР в зависящий от всех возможных направлений прихода лучей многомерный обобщенный сигнал 
Формирование обобщенного сигнала  на каждой итерации (при каждом значении возможного числа лучей К) осуществляется на дискретной сетке путем выполнения в каждом узле сетки наведения с номером ϑ следующих действий для получения отдельных значений обобщенного сигнала
на каждой итерации (при каждом значении возможного числа лучей К) осуществляется на дискретной сетке путем выполнения в каждом узле сетки наведения с номером ϑ следующих действий для получения отдельных значений обобщенного сигнала  :
:
- умножается сформированный сигнал измеренного АФР на эрмитово сопряженный идеальный сигнал  и получают сигнал
и получают сигнал  размерностью 2K×1, описывающий совокупность сфазированных сигналов каждого луча. Запоминают сигнал
размерностью 2K×1, описывающий совокупность сфазированных сигналов каждого луча. Запоминают сигнал  ;
;
- умножается эрмитово сопряженный идеальный сигнал  фазирующей функции на идеальный сигнал и получается матричный сигнал
фазирующей функции на идеальный сигнал и получается матричный сигнал  размерностью 2К×2К;
размерностью 2К×2К;
- обращается полученный сигнал  и формируется взвешивающий сигнал
и формируется взвешивающий сигнал  ;
;
- умножается запомненный сигнал на взвешивающий сигнал и получается сигнал  учитывающий режим поляризации каждого луча;
учитывающий режим поляризации каждого луча;
- умножается учитывающий режим поляризации каждого луча сигнал
на сигнал, эрмитово сопряженный запомненному сфазированному сигналу каждого луча , и получается обобщенный сигнал
 ,
,
где αϑ, βϑ - К - мерные векторы с элементами  который в развернутой форме имеет следующий вид
который в развернутой форме имеет следующий вид 
- определяется значение максимума обобщенного сигнала  и находится соответствующее найденному максимуму значение аргумента
и находится соответствующее найденному максимуму значение аргумента  ;
;
- по аргументу находятся азимутально-угломестные направления  прихода лучей
прихода лучей 
Полученные значения максимума обобщенного сигнала и азимутально-угломестных направлений прихода лучей поступают в устройство 6.
В устройстве 6 на каждой итерации выполняются следующие действия:
- по значениям сигнала измеренного АФР  поступившего от вычислителя 4, и максимума обобщенного сигнала , поступившего от формирователя 5, определяется нормированный квадрат невязки измеренного и модельного волновых фронтов по формуле
поступившего от вычислителя 4, и максимума обобщенного сигнала , поступившего от формирователя 5, определяется нормированный квадрат невязки измеренного и модельного волновых фронтов по формуле
Отметим, что значения измеренного АФР  характеризуют измеренный волновой фронт, а значение максимума обобщенного сигнала при найденных азимутально-угломестных направлениях характеризует поляризационно-зависимый К-лучевой модельный волновой фронт;
характеризуют измеренный волновой фронт, а значение максимума обобщенного сигнала при найденных азимутально-угломестных направлениях характеризует поляризационно-зависимый К-лучевой модельный волновой фронт;
- сравнивается значение невязки  с порогом Δ0 Значение порога Δ0 выбирается исходя из минимизации вероятности ложной тревоги;
с порогом Δ0 Значение порога Δ0 выбирается исходя из минимизации вероятности ложной тревоги;
- при непревышении порога Δ0, то есть при выполнении условия  фиксируют по порядку модели поляризационно-зависимого волнового фронта число лучей
фиксируют по порядку модели поляризационно-зависимого волнового фронта число лучей  в принятом радиосигнале и соответствующие каждому лучу азимутально-угломестные направления .
в принятом радиосигнале и соответствующие каждому лучу азимутально-угломестные направления .
Эти операции могут рассматриваться как операции поляризационной и пространственной селекции радиосигналов.
Найденные значения азимутально-угломестных направлений  прихода лучей поступают в формирователь 8.
прихода лучей поступают в формирователь 8.
В формирователе 8 выбираются соответствующие найденным направлениям составляющие сигнала комплексной фазирующей функции  и передаются в устройство 6.
и передаются в устройство 6.
В устройстве 6 соответствующие найденным направлениям составляющие сигнала комплексной фазирующей функции используются при преобразовании сигнала АФР  в описывающий состояние поляризации сигнал
в описывающий состояние поляризации сигнал
по которому определяется вид поляризации лучей принятого радиосигнала.
При этом
 вектор-столбец, определяющий режим поляризации сигнала k-го луча, а
вектор-столбец, определяющий режим поляризации сигнала k-го луча, а  и
и  - найденные комплексные коэффициенты поляризации сигнала k-го луча, а вид поляризации принятого радиосигнала находится следующим путем:
- найденные комплексные коэффициенты поляризации сигнала k-го луча, а вид поляризации принятого радиосигнала находится следующим путем:
- по найденным значениям  и
и  находится третья компонента
находится третья компонента  полного комплексного вектора поляризации
полного комплексного вектора поляризации  по формуле
по формуле

если  и
и  если
если 
- находится длина реальной части полного вектора поляризации 
- находится вектор, перпендикулярный векторам  и
и 
- находятся компоненты разложения комплексного вектора поляризации  по векторам kk и qk путем вычисления комплексных скалярных произведений kk
по векторам kk и qk путем вычисления комплексных скалярных произведений kk
 и qk
;
и qk
;
- определяются полуоси эллипса поляризации и угол их наклона относительно выбранной системы координат согласно формулам, приведенным в [5, с.15 9-160].
Полученное значение числа лучей  в принятом радиосигнале, соответствующие каждому лучу азимутально-угломестные направления прихода
в принятом радиосигнале, соответствующие каждому лучу азимутально-угломестные направления прихода
 и
и
 а также параметры, описывающие состояние
а также параметры, описывающие состояние

и вид поляризации каждого луча принятого радиосигнала поступает в устройство 7 для отображения на картографическом фоне, а также во внешние системы, чем обеспечивается повышение информативности пеленгования.
Устройство, реализующее способ пространственной поляризационно-чувствительной локализации источников многолучевых радиосигналов с повышенным быстродействием, по структуре совпадает со схемой, представленной на чертеже, и работает следующим образом.
В формирователе 8 предварительно до начала приема радиосигналов формируются и запоминаются для всех возможных частот приема, возможного значения числа лучей К в принятом радиосигнале и требуемых узлов сетки наведения по азимуту  и углу места
и углу места  поляризационно-зависимые идеальные сигналы многолучевой комплексной фазирующей функции и комплексные взвешивающие сигналы
поляризационно-зависимые идеальные сигналы многолучевой комплексной фазирующей функции и комплексные взвешивающие сигналы 
Идеальные сигналы представляют собой матрицы

размером N×2K. Элементы матрицы есть векторы-столбцы

и
 полученные для поля одного падающего с m-го,
полученные для поля одного падающего с m-го,  направления с горизонтальной
направления с горизонтальной  и вертикальной
и вертикальной  поляризациями.
поляризациями.
Учитывая, что в данном случае идеальные сигналы многолучевой комплексной фазирующей функции формируются предварительно до начала приема радиосигналов, они могут быть также получены, кроме аналитического способа и способа электродинамического моделирования, экспериментальной калибровкой пеленгатора на этапе его ввода в эксплуатацию. В сложных условиях размещения антенной решетки пеленгатора, например на подвижных платформах (автомобилях, кораблях, самолетах), экспериментальная калибровка пеленгатора является наиболее эффективным способом обеспечения высокой точности пеленгования [6].
Устройство 7 генерирует сигнал начала приема на заданной частоте, который поступает в формирователь 8 и преобразователь 2.
В формирователе 8 выбираются соответствующие заданной частоте приема поляризационно-зависимые идеальные сигналы комплексной фазирующей функции и комплексные взвешивающие сигналы  .
.
Выбранные сигналы и  передаются в формирователь 5, где запоминаются.
передаются в формирователь 5, где запоминаются.
Одновременно по сигналу начала приема от устройства 7 преобразователь 2 перестраивается на заданную частоту.
Многолучевой радиосигнал на заданной частоте так же, как описано ранее, принимается антеннами решетки 1, переносится на более низкую частоту в преобразователе 2 и преобразуется с помощью АЦП 3 в ансамбль цифровых сигналов. В вычислителе 4 из цифровых сигналов формируется сигнал комплексного АФР  Сигнал измеренного АФР поступает в формирователь 5 и устройство 6, где запоминается.
Сигнал измеренного АФР поступает в формирователь 5 и устройство 6, где запоминается.
В формирователе 5, итерационно увеличивая значение возможного числа лучей К и используя соответствующие числу лучей К взвешивающие сигналы , поступившие от формирователя 8, сигнал измеренного АФР преобразуется в зависящий от всех возможных направлений прихода лучей многомерный обобщенный сигнал 
Данная операция преобразования сигнала измеренного АФР является ключевой в повышении быстродействия поляризационно-чувствительного пеленгования радиосигналов, так как формирование обобщенного сигнала по формуле 
требует более чем в 2,5 раза больше операций, чем по формуле

Это достигнуто благодаря введению операций предварительного, до начала приема радиосигнала, формирования и запоминания для всех возможных частот приема и требуемых узлов сетки наведения по азимуту  и углу места
и углу места  поляризационно-зависимых комплексных взвешивающих сигналов .
поляризационно-зависимых комплексных взвешивающих сигналов .
Кроме того, в формирователе 5 на каждой итерации выполняются следующие действия:
- определяется значение максимума обобщенного сигнала и находится соответствующее найденному максимуму значение аргумента;
- по аргументу находятся азимутально-угломестные направления прихода лучей 
Полученные значения максимума обобщенного сигнала  и азимутально-угломестных направлений прихода лучей
и азимутально-угломестных направлений прихода лучей  поступают в устройство 6.
поступают в устройство 6.
В устройстве 6 на каждой итерации по значениям сигнала измеренного АФР  поступившего от вычислителя 4, и максимума обобщенного сигнала
поступившего от вычислителя 4, и максимума обобщенного сигнала  поступившего от формирователя 5, определяется число лучей в принятом радиосигнале и соответствующие каждому лучу азимутально-угломестные направления
поступившего от формирователя 5, определяется число лучей в принятом радиосигнале и соответствующие каждому лучу азимутально-угломестные направления  и
и 
Найденные значения азимутально-угломестных направлений прихода лучей поступают в формирователь 8, в котором выбираются соответствующие найденным направлениям составляющие сигнала комплексной фазирующей функции  и передаются в устройство 6. После этого в устройстве 6 соответствующие найденным направлениям составляющие сигнала комплексной фазирующей функции
и передаются в устройство 6. После этого в устройстве 6 соответствующие найденным направлениям составляющие сигнала комплексной фазирующей функции  используются при преобразовании сигнала АФР в описывающий состояние поляризации сигнал
используются при преобразовании сигнала АФР в описывающий состояние поляризации сигнал

по которому определяется вид поляризации лучей принятого радиосигнала.
Полученное значение числа лучей  соответствующие каждому лучу азимутально-угломестные направления прихода
соответствующие каждому лучу азимутально-угломестные направления прихода  и,
и,  a также параметры, описывающие состояние и вид поляризации каждого луча принятого радиосигнала, поступают в устройство 7 для отображения на картографическом фоне, а также во внешние системы, чем обеспечивается повышение информативности пеленгования.
a также параметры, описывающие состояние и вид поляризации каждого луча принятого радиосигнала, поступают в устройство 7 для отображения на картографическом фоне, а также во внешние системы, чем обеспечивается повышение информативности пеленгования.
Из приведенного описания следует, что устройство, содержащее антенную решетку, многоканальный преобразователь частоты, многоканальный АЦП, вычислитель АФР, формирователь обобщенного сигнала, устройство оценки параметров, формирователь фазирующей функции и взвешивающего сигнал, а также устройство управления и отображения, реализует современную технологию пеленгования, которая может рассматриваться как совместная подгонка параметров модели как по направлению прихода, так и по виду поляризации пеленгуемых многолучевых радиосигналов.
По сравнению с прототипом предложенный способ обеспечивает, как минимум, 3 дБ выигрыш по чувствительности. Кроме того, в сложных условиях размещения антенной решетки пеленгатора, например на подвижных платформах (автомобилях, кораблях, самолетах), предложенный способ обеспечивает существенное повышение точности и достоверности пеленгования за счет дополнительной селекции принятых многолучевых радиосигналов по поляризации.
Таким образом, способ пространственной поляризационно-чувствительной локализации источников многолучевых радиосигналов обеспечивает повышение эффективности (точности и информативности) пеленгования радиосигналов в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех за счет:
1) расширения поля физических признаков радиосигналов, используемых при поляризационно-чувствительной локализации многолучевого поля с неизвестным числом лучей на фоне шумов и помех. Поляризационный признак дополняет используемые в прототипе пространственный, временной (частотный) и корреляционный признаки;
2) использования обобщенного критерия формы волнового фронта, предусматривающего проверку степени близости формы принятого и модельных многолучевых волновых фронтов с учетом поляризации в качестве признака достоверности поляризационно-чувствительной локализации источников многолучевого поля с неизвестным числом лучей. Это снижает аномально большие ошибки пеленгования радиосигналов многолучевого поля в условиях априорной неопределенности;
3) применения новых поляризационно-чувствительных операций обработки принимаемых радиосигналов, включающих формирование поляризационно-зависимых сигналов комплексной фазирующей функции и их использование при преобразовании сигнала АФР в многомерный обобщенный сигнал и обеспечивающих благодаря согласованию принятого многолучевого радиосигнала и многолучевой фазирующей функции определение числа лучей, направлений прихода и вида поляризации каждого луча локализуемых радиосигналов, благодаря чему удается решить поставленную задачу с достижением технического результата.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. US, патент, 5 032 844, кл. G01S 5/04, 1991 г.
2. RU, патент, 2 285 938, кл. G01S 5/04, 2006 г.
3. Шевченко В.Н. Оценивание углового положения источников когерентных сигналов на основе методов регуляризации // Радиотехника. - 2003. - №9. - С.3-10.
4. Лерер A.M., Шевченко В.Н. Повышение эффективности корабельных радиопеленгаторов методами электродинамического моделирования // Электромагнитные волны и электронные системы, 2007, №5, с.21-24.
5. Ландау Л.Д., Лившиц Е.М. Теория поля. М.: Наука, 1988.
6. RU, патент, 2 309 425, кл. G 01 S 7/40, G09В 9/00, 2007 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ (ВАРИАНТЫ) | 2008 |
|
RU2393498C2 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-НЕЗАВИСИМОГО ПЕЛЕНГОВАНИЯ МНОГОЛУЧЕВЫХ РАДИОСИГНАЛОВ | 2010 |
|
RU2431862C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2016 |
|
RU2624449C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2713866C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2018 |
|
RU2702102C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-НЕЗАВИСИМОГО ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ШИРОКОПОЛОСНЫХ РАДИОСИГНАЛОВ | 2009 |
|
RU2410707C2 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО РАДИОКОНТРОЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2546330C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ПОИСКА МАЛОРАЗМЕРНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2557251C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2546329C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444755C1 |
Изобретение относится к измерительной технике и может быть использовано в радиотехнике для определения азимутального и угломестного направлений на источники многолучевых радиосигналов в условиях априорной неопределенности относительно числа лучей, поляризационных и пространственных параметров радиосигналов, шумов и помех. Достигаемым техническим результатом изобретения является повышение эффективности (точности и информативности) пространственной локализации источников многолучевых радиосигналов в условиях априорной неопределенности относительно лучевой структуры, поляризационных и пространственных параметров радиосигналов, шумов и помех. Повышение эффективности достигается за счет расширения поля физических признаков радиосигналов, используемых при поляризационно-чувствительной локализации многолучевого поля с неизвестным числом лучей на фоне шумов и помех, использования обобщенного критерия формы волнового фронта в качестве признака достоверности поляризационно-чувствительной локализации, применения новых поляризационно-чувствительных операций обработки, обеспечивающих определение числа лучей, направлений прихода и вида поляризации каждого луча локализуемых радиосигналов. 2 н.п. ф-лы, 1 ил.
1. Способ пространственной поляризационно-чувствительной локализации источников многолучевых радиосигналов, заключающийся в том, что принимают многолучевой радиосигнал многоэлементной антенной решеткой и формируют ансамбль радиосигналов, зависящих от времени и номера антенного элемента, синхронно преобразуют ансамбль принятых радиосигналов в цифровые сигналы, из цифровых сигналов получают сигнал комплексного амплитудно-фазового распределения (АФР)  описывающий распределение амплитуд и фаз принятого радиосигнала на элементах решетки, запоминают сигнал измеренного АФР
описывающий распределение амплитуд и фаз принятого радиосигнала на элементах решетки, запоминают сигнал измеренного АФР  отличающийся тем, что формируют и запоминают для заданной частоты приема, возможного значения числа лучей в принятом радиосигнале и требуемых узлов сетки наведения по азимуту и углу места поляризационно-зависимые идеальные сигналы многолучевой комплексной фазирующей функции
отличающийся тем, что формируют и запоминают для заданной частоты приема, возможного значения числа лучей в принятом радиосигнале и требуемых узлов сетки наведения по азимуту и углу места поляризационно-зависимые идеальные сигналы многолучевой комплексной фазирующей функции  итерационно увеличивая значение возможного числа лучей и используя соответствующие числу лучей сигналы фазирующей функции
итерационно увеличивая значение возможного числа лучей и используя соответствующие числу лучей сигналы фазирующей функции  преобразуют сигнал измеренного АФР
преобразуют сигнал измеренного АФР  в зависящий от всех возможных направлений прихода лучей многомерный обобщенный сигнал
в зависящий от всех возможных направлений прихода лучей многомерный обобщенный сигнал  каждый раз определяют значение максимума обобщенного сигнала и соответствующее найденному максимуму значение аргумента, по аргументу находят азимутально-угломестные направления
каждый раз определяют значение максимума обобщенного сигнала и соответствующее найденному максимуму значение аргумента, по аргументу находят азимутально-угломестные направления  ,
,  прихода лучей, а по значениям АФР
прихода лучей, а по значениям АФР  и максимума обобщенного сигнала
и максимума обобщенного сигнала  определяют нормированный квадрат невязки
определяют нормированный квадрат невязки  измеренного и модельного волновых фронтов, сравнивают значение невязки с порогом и при не превышении порога фиксируют по порядку модели волнового фронта число лучей в принятом радиосигнале и соответствующие каждому лучу азимутально-угломестные направления
измеренного и модельного волновых фронтов, сравнивают значение невязки с порогом и при не превышении порога фиксируют по порядку модели волнового фронта число лучей в принятом радиосигнале и соответствующие каждому лучу азимутально-угломестные направления  выбирают соответствующие найденным направлениям
выбирают соответствующие найденным направлениям  составляющие сигнала комплексной фазирующей функции
составляющие сигнала комплексной фазирующей функции  используя которые преобразуют сигнал АФР
используя которые преобразуют сигнал АФР  в описывающий состояние поляризации сигнал
в описывающий состояние поляризации сигнал  по которому определяют вид поляризации лучей принятого радиосигнала.
по которому определяют вид поляризации лучей принятого радиосигнала.
2. Способ пространственной поляризационно-чувствительной локализации источников многолучевых радиосигналов, заключающийся в том, что принимают многолучевой радиосигнал многоэлементной антенной решеткой и формируют ансамбль радиосигналов, зависящих от времени и номера антенного элемента, синхронно преобразуют ансамбль принятых радиосигналов в цифровые сигналы, из цифровых сигналов получают сигнал комплексного амплитудно-фазового распределения (АФР)  описывающий распределение амплитуд и фаз принятого радиосигнала на элементах решетки, запоминают сигнал измеренного АФР
описывающий распределение амплитуд и фаз принятого радиосигнала на элементах решетки, запоминают сигнал измеренного АФР  отличающийся тем, что предварительно до начала приема радиосигналов формируют и запоминают для всех возможных частот приема, возможного значения числа лучей в принятом радиосигнале и требуемых узлов сетки наведения по азимуту и углу места поляризационно-зависимые идеальные сигналы многолучевой комплексной фазирующей функции
отличающийся тем, что предварительно до начала приема радиосигналов формируют и запоминают для всех возможных частот приема, возможного значения числа лучей в принятом радиосигнале и требуемых узлов сетки наведения по азимуту и углу места поляризационно-зависимые идеальные сигналы многолучевой комплексной фазирующей функции  и комплексные взвешивающие сигналы
и комплексные взвешивающие сигналы  а при приеме на заданной частоте итерационно увеличивая значение возможного числа лучей и, используя соответствующие числу лучей взвешивающие сигналы
а при приеме на заданной частоте итерационно увеличивая значение возможного числа лучей и, используя соответствующие числу лучей взвешивающие сигналы  преобразуют сигнал измеренного АФР
преобразуют сигнал измеренного АФР  в зависящий от всех возможных направлений прихода лучей многомерный обобщенный сигнал по формуле
в зависящий от всех возможных направлений прихода лучей многомерный обобщенный сигнал по формуле  каждый раз по значению максимума обобщенного сигнала находят азимутально-угломестные направления прихода лучей, по значениям сигнала измеренного АФР и максимума обобщенного сигнала определяют число лучей в принятом радиосигнале и соответствующие каждому лучу азимутально-угломестные направления, а по значениям сигнала АФР и соответствующим найденным направлениям составляющим сигнала комплексной фазирующей функции получают описывающий состояние поляризации сигнал, по которому определяют вид поляризации лучей принятого радиосигнала.
каждый раз по значению максимума обобщенного сигнала находят азимутально-угломестные направления прихода лучей, по значениям сигнала измеренного АФР и максимума обобщенного сигнала определяют число лучей в принятом радиосигнале и соответствующие каждому лучу азимутально-угломестные направления, а по значениям сигнала АФР и соответствующим найденным направлениям составляющим сигнала комплексной фазирующей функции получают описывающий состояние поляризации сигнал, по которому определяют вид поляризации лучей принятого радиосигнала.
| СПОСОБ ПЕЛЕНГОВАНИЯ С ПОВЫШЕННОЙ РАЗРЕШАЮЩЕЙ СПОСОБНОСТЬЮ | 2004 |
|
RU2285938C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2006 |
|
RU2316784C1 |
| СПОСОБ ПРОСТРАНСТВЕННОГО РАЗНЕСЕННОГО ПРИЕМА СИГНАЛА ОТ ИСТОЧНИКА ИЗЛУЧЕНИЯ, ПЕРЕДАННОГО ПО МНОГОЛУЧЕВОМУ КАНАЛУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2075832C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ СЛОЖНЫХ СИГНАЛОВ | 2005 |
|
RU2286583C1 |
| US 5361073 A, 01.11.1994 | |||
| Способ изготовления ферритовыхСЕРдЕчНиКОВ МАгНиТНыХ гОлОВОК | 1979 |
|
SU834748A1 |
| СПОСОБ ПОЛУЧЕНИЯ ПРОИЗВОДНЬ[Х ОКСАДИАЗОЛ-1, 3, 4-ОНА-2 | 0 |
|
SU186344A1 |
| US 4621267 A, 04.11.1986. | |||

