Настоящее изобретение, в основном, относится к системам автоматического управления и более конкретно к системе управления работой устройства, в котором используется емкостный датчик.
К настоящему времени разработано большое число емкостных датчиков для обнаружения людей или материалов, чтобы включить аварийную сигнализацию, сформировать сигнал индикации или управления. Например, емкостные схемы обнаружения используются для систем аварийной сигнализации, чтобы обеспечить сигнал в ответ на касание конкретного предмета или на нахождение вблизи охраняемого объекта. В других случаях емкостные схемы обнаружения используются, чтобы обнаружить присутствие или отсутствие жидкостей и твердых тел с последующим включением индикатора и сигналов тревоги или измерения. Емкостные датчики также используются, чтобы измерить расстояние до объекта, размер объекта, определить содержание влаги в материале, загрязнение маслом или повышение влажности, давления, уровня жидкости, и фактически формируют базу для обнаружения предметов и для различных измерений.
При управлении различными раздаточными устройствами часто предпочтительно использовать устройство без прямого контакта с человеком. Например, это предпочтительно по санитарным причинам при мытье рук в общественных туалетах, чтобы избежать необходимости физического контакта с рукоятками крана, устройствами для раздачи полотенец, сушилками для рук, дозаторами жидкого мыла и т.д.
Хотя разработано множество систем управления для таких свободных от прикосновения устройств, чтобы экономить воду и мыло, они подвержены ложным срабатываниям. Иными словами, устройства включаются без фактического присутствия человека. Это, конечно, приводит к потере жидкости, что противоречит самому смыслу создания такой автоматической системы управления.
Далее, в случае использования дозаторов жидкого мыла и т.д. безопасность становится важным фактором, поскольку при неправильном распределении таких жидкостей они попадают на пол или на другие поверхности, поскользнувшись на которых человек может получить телесное повреждение.
Проблема ложного срабатывания и, в более общем смысле надежности, так же как и чувствительность обнаружения ближайшего объекта датчиком наличия, вытекает из потребности надежного распознавания небольших изменений силы сигнала из-за изменений расстояния до объекта в зависимости от изменений силы сигнала, которая может быть вызвана другими воздействиями типа шума датчика, дрейфа датчика или вынужденных изменений сигналя из-за фактических изменений непосредственно в условиях окружающей среды, типа загрязнения датчика и других эффектов, которые могут привести к формированию сигнала, который будет иметь величину сигнала обнаружения или даже превышать такой сигнал.
В случае использования инфракрасных датчиков наличия, которые, например, часто применяются в современных коммерческих бесконтактных дозаторах жидкого мыла и других подобных устройствах, ложное срабатывание может возникнуть из-за влияния постороннего света, падающего на датчик из-за случайных отражений от блестящих предметов или отказа прибора по обнаружению объекта из-за изменений в отражающей способности объекта или загрязнения оптики.
В случае использования емкостных датчиков наличия, где объект обнаруживается благодаря изменению емкости ближайшего присутствующего объекта, обнаружение ближайшего объекта в обычных средах становится затруднительным и ненадежным, потому что фактическая емкость изменения из-за наличия ближайшего объекта может быть небольшой по сравнению с другими изменениями емкости окружающей среды.
Общие, обычно встречающиеся изменения в окружающей среде, которая может вызывать такие посторонние изменения емкости, включают загрязнение поверхности электродов или других деталей в области зоны обнаружения из-за постепенного накопления грязи или конденсации влаги, существенных изменений во влажности окружающей среды, постепенных изменений в близости или составе других близлежащих конструкций и объектов или изменений в месте монтажа самого датчика, и все эти факторы могут вызывать небольшие изменения в форме электрического поля или интенсивности поля между электродами датчика, изменяя таким образом состояние заряда и, следовательно, емкость между электродами.
В настоящее время в известной области техники имеются два основных типа емкостных датчиков наличия. В одном случае используется так называемый датчик плоскопараллельного типа, в котором имеется только один считывающий электрод, и измеряется емкость между ним и землей. Если обнаруживаемый объект, в основном, токопроводящий и заземлен, эта схема может эффективно сформировать второй электрод, так что движение объекта к первичному считывающему электроду или от него изменяет емкость и это изменение измеряется и связывается с расстоянием или близостью объекта.
Если обнаруживаемый объект, наоборот, является электрическим изолятором, используется второй неподвижный электрод, который устанавливается на фиксированном расстоянии от первого и соединяется с землей, и обнаруживаемый объект проходит между этими двумя электродами, вызывая изменение емкости. Во втором случае, называемом датчиком краевого поля, в устройстве имеются два считывающих электрода, расположенных в датчике рядом друг с другом, и обнаруживаемый объект изменяет емкость между ними, изменяя электрическое поле благодаря диэлектрическому или токопроводящему эффекту. Конечное изменение емкости обнаруживается, и это затем может быть отнесено к изменению расстояния или близости объекта. Емкостные датчики наличия типа краевого поля широко используются в промышленности на производственных линиях, где датчики, как правило, устанавливаются в определенных местах и закрепляются неподвижно, и все другие потенциальные помехи со стороны окружающей среды могут контролироваться.
Однако такие устройства часто также включают дополнительный электрод, чтобы отдельно учитывать дрейф и таким образом компенсировать поверхностное загрязнение датчика. Максимальное расстояние считывания составляет диапазон датчика, и этот диапазон зависит от чувствительности датчика к изменению емкости, характера и размера обнаруживаемого объекта и физического размера считывающих электродов. Большие считывающие электроды обеспечивают больший диапазон.
Более чувствительное детектирование обеспечивает больший диапазон для данного размера электрода и данного обнаруживаемого объекта, что является преимуществом при использовании прибора в тех областях применения, где большие объемы электродов нежелательны при желательном большом диапазоне. Однако более чувствительное обнаружение изменений в емкости само по себе не обеспечит надежную работу датчика там, где существенные изменения емкости могут также возникать из-за влияния окружающей среды.
Настоящее изобретение было разработано с целью преодоления недостатков известных систем и создания системы емкостного датчика с повышенной чувствительностью и надежностью.
Эта цель достигнута путем создания чувствительного средства, которое определяет только скорость изменения емкости от времени. Эта величина математически обозначается как dC/dt и явно отличается от измерения различия между двумя емкостями, что характерно для известной области техники.
dC/dt = скорость изменения емкости зависит от времени.
Таким образом, предлагаемая система отличается от известных систем, в которых обнаружение объектов основано на изменении емкости.
В настоящем изобретении обнаружение объекта, которое выполняется в фазовой области, используя непрерывно действующий контур управления, в основном, не реагирует на постепенные изменения емкости из-за изменений в окружающей среде, которые могут быть выражены любой абсолютной величиной при условии, что эти изменения происходят в течение достаточно больших отрезков времени и, следовательно, со скоростью, которая ниже чувствительности по обнаружению для величины dC/dt.
Следует отметить, что хотя сигнал скорости изменения по времени в принципе может альтернативно быть получен с выхода различных емкостных датчиков известной конструкции, которые измеряют изменение емкости с помощью электроники, дифференцируя сигнал, например производный сигнал, такая схема не обеспечила бы требуемое надежное и чувствительное обнаружение объектов. Это происходит потому, что само действие дифференцирования сигнала датчика делает конечный сигнал с большим уровнем шумов и, следовательно, менее надежным.
В настоящем изобретении по существу реагирующие на движение чувствительные емкостные средства обнаружения служат для обнаружения движения объекта, например руки человека, в области, которая находится в пределах заданного диапазона расстояния от датчика. Система в соответствии с настоящим изобретением обеспечивает средство для надежно обнаружения небольших движений руки по направлению к датчику, когда она находится в пределах зоны обнаружения. Кроме этого, надежность датчика не зависит от того, является ли человек электрически заземленным или периодически заземлен в течение работы датчика, как это может происходить в случае, когда кто-то моет руки под краном.
Эта надежность постоянно обеспечивает устойчивость к ложному срабатыванию, потому что датчик непрерывно адаптируется к электрическим характеристикам среды и к постепенным изменениям этой среды общей величины, больше той, которая имеет место при вводе руки в зону обнаружения объекта. Таким образом, датчик характеризуется отсутствием дрейфа.
Таким образом, настоящее изобретение функционирует в диапазоне различных сред и не требует регулировки от руки. Кроме того, настоящее изобретение характеризуется высокой устойчивостью к воздействию радиопомех и других внешних электрических полей, имеет низкое собственное электромагнитное излучение и потребляет небольшую мощность. Это последнее обстоятельство позволяет обеспечить длительный срок службы батарей.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Система емкостного датчика в соответствии с настоящим изобретением служит для управления работой устройства в ответ на скорость изменения емкости из-за движения ближайшего объекта. Система, в основном, содержит, по меньшей мере, два считывающих электрода, отделенных друг от друга для создания электрического поля между считывающими электродами. Электронная схема обеспечивает выходной управляющий сигнал в ответ на скорость изменения емкости считывающих электродов из-за движения ближайшего объекта в пределах поля без промежуточного электронного дифференцирования сигналов, связанных с изменением емкости.
Предпочтительно, считывающие электроды расположены на плоской поверхности и имеют такую конфигурацию, которая позволяет создать электрическое поле между считывающими электродами и выходящее за их пределы.
Конкретно, электронная схема может включать цепь фазовой автоподстройки частоты (ФАПС), которая содержит генератор управляемый напряжением (ГУН), генератор фиксированной опорной частоты для ГУН, блок сравнения фазы/частоты, цепь задержки по фазе для задержки по фазе на выходе ГУН по отношению к выходу опорной частоты, и который действует таким образом, что он осуществляет формирование частоты ГУН перед действием генератора опорной частоты, когда контур стабилизирован по фазе. Схема также содержит контурный фильтр, который интегрирует сигнал фазовой погрешности от блока сравнения и таким образом определяет динамическую характеристику контура.
Характеристики контурного фильтра таковы, что они обеспечивают замедление и фактически согласование динамической характеристики контура с характеристикой масштаба времени движения обнаруживаемого объекта. Дополнительно, чувствительная по фазе спусковая схема включена между ГУН и генератором опорной частоты и вырабатывает выходной сигнал датчика всякий раз, когда эти два сигнала находятся в фазе.
ГУН соединен со считывающими электродами таким образом, что любые увеличения емкости между ними уменьшают частоту ГУН, и наоборот. Изменение емкости, вызванное объектом, перемещающимся в зону действия считывающих электродов, вызывает сдвиг фазы рабочей частоты по отношению к сдвигу фазы опорной частоты, который тем больше, чем больше скорость изменения емкости считывающих электродов.
Таким образом, сигнал фазовой погрешности, сформированный блоком сравнения, вводится в контурный фильтр и, если фазовая погрешность накапливается с достаточно скоростью, результирующий сдвиг фазы превышает пороговую величину, определенную цепью задержки по фазе, выдается выходной сигнал датчика или формируется запускающий сигнал. Этот сигнал может затем использоваться для управления другим устройством, таким как насос для закачки жидкого мыла, где датчик используется для обнаружения движения рук около бесконтактного раздаточного устройства или индикации близости объекта через соединение с дисплеем или сигнальным устройством.
В предпочтительном варианте настоящего изобретения схема формирования запускающего сигнала включает D-мультивибратор и в альтернативном варианте спусковую схему, включающую блок сравнения напряжения.
В предпочтительном варианте делитель частоты включен между ГУН и блоком сравнения фазы/частоты и обеспечивает работу ГУН на частоте, которая является постоянной кратной величиной этого генератора опорной частоты.
Кроме того, в предпочтительном варианте настоящего изобретения цепь управления включает дополнительную цепь обратной связи для контура, который включен параллельно контурному фильтру и служит для устранения множественных запускающих сигналов для очень больших ошибок задержки по фазе, которые в противном случае были бы результатом очень больших сигналов dC/dt, сформированных в считывающих электродах. Эта цепь обратной связи включает схему, которая адаптируется к очень большим сигналам фазовой погрешности таким образом, что для небольших сигналов рассогласования она обеспечивает незначительный выход, в то время как для очень больших сигналов она не позволяет разности фаз выходить из диапазона ±90°. В предпочтительном варианте эта цепь обратной связи включает диоды вместе с демодулирующей резистивно-емкостной схемой (RC).
Говоря более конкретно, ГУН обеспечивает рабочую частоту для считывающих электродов, которая является достаточно высокой, чтобы гарантировать, что если объект - рука человека, который соединен с землей, то рука все равно будет обнаружена как диэлектрический объект. Это устраняет любые возможные артефакты обнаружения из-за изменений в электрически заземленной руке и, как известно из данной области техники, удовлетворяет по минимальной рабочей частоте для датчика порядка нескольких сотен килогерц. Следовательно, в предпочтительном варианте и там, где объект - рука, а устройство - дозатор жидкого мыла, рабочая частота устанавливается приблизительно 0,5 МГц. В этом отношении и альтернативно для других областей обнаружения предотвращение эффектов проводимости может наложить другие предпочтительные ограничения по рабочей частоте. Такие ограничения находятся в рамках объема изобретения.
Предпочтительно заземленный экранирующий электрод также включен в систему и расположен отдельно от считывающих электродов, параллельно этим электродам и над ними. Это устраняет электрическое поле считывания в области выше экрана с тем, чтобы эта область могла быть использована без ложного запуска системы. В альтернативном варианте экранирующий электрод может быть разбит на две половины и каждая из них может управляться тем же самым напряжением, что и противостоящий считывающий электрод, чтобы уменьшать емкость между считывающими электродами и экранировать их и таким образом повысить чувствительность и, следовательно, диапазон датчика. Эта альтернатива требует, чтобы дополнительная электронная схема формировала бы напряжение определенной формы волны для экрана.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Преимущества и особенности настоящего изобретения будут лучше поняты при чтении следующего описания со ссылками на чертежи, на которых:
фигура 1 - блок-схема одного варианта настоящего изобретения, в котором в спусковой схеме используется D-мультивибратор;
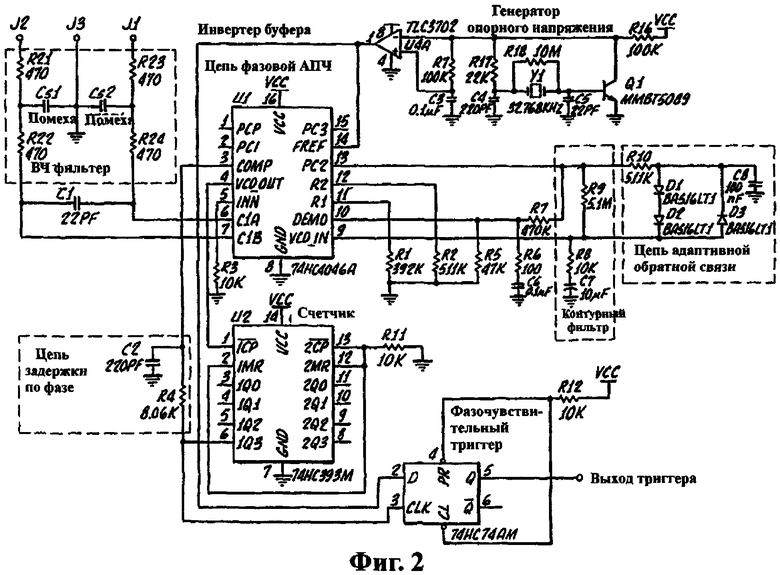
фигура 2 - принципиальная схема устройства, показанного на блок-схеме фигуры 1;
фигура 3 - блок-схема альтернативного варианта настоящего изобретения, в котором блок сравнения используется для формирования спусковой схемы;
фигура 4 - чертеж конфигурации считывающего электрода, подходящей для использования с блок-схемой устройства, показанного на фигурах 1 или 3; и
фигура 5 - график измеренного изменения емкости считывающих электродов, показанных на фигуре 4 при вводе в поле обнаружения объекта раскрытой руки.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На фигуре 1 представлена блок-схема электроники датчика 10 в соответствии с настоящим изобретением. Показанная здесь схема - пример электронной схемы для формирования выходного управляющего сигнала в ответ на скорость изменения емкости считывающих электродов из-за движения ближайшего объекта в пределах поля без промежуточного электронного дифференцирования сигналов, связанных с изменением емкости.
Общий принцип работы следующий: цепь фазовой автоподстройки частоты (ФАПС) 12 соединена со считывающими электродами 14 и 16. ФАПС включает генератор, управляемый напряжением (ГУН) 22, который имеет выход, частота которого линейно связана с входным напряжением управления 102. Выход соединен с блоком сравнения фазы/частоты через делитель частоты 100 и фиксированную цепь задержки по фазе 34.
Генератор опорной частоты 32 также соединен с блоком сравнения и вырабатывает непрерывный сигнал фиксированный частоты. Блок сравнения фазы/частоты 24 в основном, обеспечивает высокое напряжение (Vcc), если разделенная частота ГУН ниже опорной частоты, и низкое напряжение (0), если разделенная частота ГУН выше опорной частоты.
Кроме того, когда эти две частоты равны, но имеется разность фаз между ними, блок сравнения 24 находит нарастающий фронт обоих сигналов и формирует выходной импульс, ширина которого пропорциональна той разности фаз, где она лежит между ±360°. Среднее напряжение контура управления устанавливается в диапазоне от 0 до Vcc линейным образом, в результате чего блок сравнения фазы/частоты имеет тенденцию вести нарастающий фронт обоих сигналов к нулевой разности фаз. Когда это достигнуто, ФАПС стабилизируется по фазе таким образом, что фаза разделенной частоты ГУН всегда опережает фазу опорной частоты на величину, определяемую цепью задержки по фазе 34. Это нормальное статическое состояние датчика.
В предпочтительном варианте делитель частоты 100 делит частоту ГУН на 16, чтобы ГУН работал на частоте в 16 раз выше частоты генератора опорной частоты. Использование делителя частоты в таком режиме позволяет использовать менее затратную нижнюю частоту и генератор опорной частоты малой мощности, необходимые для основной работы датчика. ГУН и блок сравнения фазы/частоты могут быть выполнены, например, на микросхеме CD74HC4046AM, выпускаемой компанией Texas Instruments.
Контурный фильтр 20 представляет собой резистивно-емкостную цепь (RC), и он включает большой конденсатор, который определяет динамическую характеристику контура управления. Небольшой резистор включен последовательно с этим конденсатором и соединен с вводом ГУН 102. Этот резистор позволяет контуру управления подавить небольшое количество шумов схемы и таким образом стабилизировать фазовое отношение между ГУН и опорными сигналами.
Предпочтительно также включить в систему дополнительную цепь обратной связи 101, которая соединяется параллельно контурному фильтру 20. Эта схема служит для устранения ложных множественных запускающих сигналов, которые в противном случае имели бы место в примерах или областях применения, где иногда происходят очень большие ошибки задержки по фазе из-за очень большого отношения величин dC/dt, имеющего место в считывающих электродах. Такие большие сигналы могут иметь место в случаях слишком быстрого движения обнаруживаемого объекта или при движении этого объекта на близком расстоянии.
Такие случайные большие сигналы имеют место, если датчик используется для обнаружения движения руки при срабатывании дозатора жидкого мыла. Эта цепь обратной связи включает схему, которая адаптируется к очень большим сигналам фазовой погрешности таким образом, что для небольших сигналов рассогласования схема обеспечивает незначительный выход, в то время как для очень больших сигналов она не позволяет разности фаз выйти за пределы диапазона ±90°. В предпочтительном варианте эта параллельная цепь обратной связи включает два последовательных диода в направлении сдвига фазы, которые включают в работу спусковую схему и один диод в противоположном направлении вместе с демодулирующей цепью RC. Это обеспечивает дополнительный параллельный канал обратной связи, которую сигнал фазовой погрешности не может подавить.
Чувствительный блок сравнения фаз, например типа D-триггера 30, соединен с генератором опорной частоты 32 и с разделенным по частоте сигналом ГУН, где генератор опорной частоты соединен с вводом данных, а генератор, управляемый напряжением, соединен с синхронизирующим входом. Это устройство используется как триггер, чтобы сформировать выходной сигнал датчика. По мере того, как емкость в считывающих электродах увеличивается из-за движения объекта типа руки (не показана) в области активации датчика и где это делается с достаточной скоростью, чтобы подавить сигналы контура, фаза между этими сигналами будет иметь тенденцию к сдвигу. Всякий раз, когда этот сдвиг равен или выше порога фазы, установленного цепью задержки по фазе 34, ввод данных будет низким вместо высокого во время перехода синхронизации, и будет сформирован выходной импульс спусковой схемы.
Следует отметить, что описанное выше устройство сконфигурировано с расчетом обнаружения только положительных величин dC/dt в противоположность отрицательным величинам dC/dt или и положительных и отрицательных величин dC/dt. Это означает, что конфигурация датчика, описанная выше, формирует выходной сигнал только тогда, когда обнаруживаемый объект перемещается к считывающим электродам вместо удаления от них. Этот режим работы задается проектировщиком и определенно выгоден в раздаточном устройстве для дозирования жидкого мыла там, где желательно, чтобы мыло выдавалось только тогда, когда рука перемещается к раздаточному устройству и не тогда, когда рука отходит от этого устройства. Этот режим работы подходит по своей простоте и интуитивно приемлем для использования обычными пользователями дозатора жидкого мыла, а также имеет дополнительную и выгодную особенность, которая характерна для применения дозатора жидкого мыла.
Эта дополнительная особенность используется в случае, когда пользователю требуется дополнительная или последовательная подача мыла, которая, следовательно, требует дополнительных или последовательных запускающих сигналов датчика. В этом случае, а также потому, что датчик реагирует на положительную величину dC/dt и корректирует статические изменения в емкости, например благодаря вынужденному статическому присутствию руки, пользователь не должен полностью убирать и повторно вводить в зону действия датчика свои руки и может вместо этого просто переместить их ближе к считывающим электродам или альтернативно перемещать свои руки вверх и вниз легким движением в пределах зоны активации, после чего активация датчика и подача мыла произойдут после обнаружения каждого движения считывающими электродами.
Если требуется и выгодно для других областей применения, схема датчика может быть легко переконфигурирована таким образом, чтобы вместо обнаружения отрицательного события dC/dt будет создан запускающий сигнал, если обнаруживаемый объект перемещается из зоны активации. Такой датчик может в принципе быть использован там, где желательно обнаружить движение объекта, который перемещается из области действия датчика.
Статические отношения фаз могут быть установлены различными способами, но предпочтительно использовать элемент задержки по фазе 34, используя простую цепь RC на входе блока сравнения фазы и частоты 24. Эта цепь вынуждает генератор ГУН 22 срабатывать перед включением генератора опорной частоты 32 на величину, которая будет сбалансирована между потребностью в помехоустойчивости и потребностью в чувствительности. Чем ближе эти две фазы, тем чувствительней спусковая схема. Чем больше сдвиг фазы между ними, тем больше допуск на шумы схемы и флуктуации генератора. Этот элемент 34 устанавливает порог срабатывания спусковой схемы.
Там, где частота генератора опорной частоты равна приблизительно 32 кГц, задержка фазы может быть установлена на величину в диапазоне от 0,5 до 4 микросекунд, что эквивалентно приблизительно 6-45 градусам, и предпочтительно установить задержку порядка 1,5 микросекунды.
Что касается радиопомех, то известно, что емкостные датчики, типичные для известной области техники, часто уязвимы в отношении ложного срабатывания из-за влияния случайного электромагнитного излучения. В настоящем изобретении высокая степень устойчивости к помехам радиочастотного диапазона обеспечивается тем, что датчик заземлен на ФАПС схеме, которая настроена или используется на определенной низкой частоте и которая, следовательно, имеет хорошее присущее ей подавление сигнала в полосе частот выше и ниже рабочей частоты.
Тем не менее, в окружающей среде могут возникнуть радиочастотные помехи, которые являются достаточно интенсивными и на достаточно близких частотах, чтобы вызвать ложное срабатывание датчика. С учетом этого обстоятельства в предпочтительном варианте между считывающими электродами и ГУН 22 включены фильтры 103 и 104.
Эти фильтры уменьшают величину вторжения в схему датчика высокочастотных сигналов от случайного внешнего электромагнитного излучения высокой частоты, которые могут, например, излучаться бытовыми кухонными приборами типа микроволновых печей, а также сотовыми телефонами и которые в противном случае могли бы иметь достаточную силу сигнала, чтобы вызвать ложное срабатывание датчика. Эти фильтры могут состоять из ферритовых фильтров, однако в случае дозатора жидкого мыла достаточное подавление вредных сигналов может быть достигнуто путем использования простой схемы из резисторов и конденсаторов.
На фигуре 2 представлена принципиальная схема практического устройства датчика 10, где два считывающих электрода подключены непосредственно к точкам, обозначенным J1 и J2. В частности, эта схема может также включать цепь с экранирующим электродом, где экранирующий электрод подключен непосредственно к точке соединения, обозначенной J3. Эта схема может быть создана на основе печатной платы, хорошо известной специалистам в данной области, в которой используются детали, показанные на фигуре 2. Следует также отметить, что если желательно по причинам. экономии при массовом производстве большого объема, эта схема может быть усовершенствована и представлена в виде одной интегральной схемы, известной специалистам как специализированная, интегральная схема (СИС).
Следующее математическое представление динамической характеристики датчика дается, чтобы показать и объяснять основные функции датчика. Характеристики схемы 10 будут различны для различных форм изменения емкости по времени. Для области применения дозатора жидкого мыла разумное приближение к этой форме - изменение пилообразного сигнала в емкости. Соответственно, решение анализа характеристики схемы, где спусковая схема заземлена на D-триггер и для изменения пилообразного сигнала в емкости, дается уравнением

где
где
Ко - коэффициент усиления,
F1 - рабочая частота ГУН, соответствующая управляющему напряжению ГУН V1,
F2 - рабочая частота ГУН, соответствующая управляющему напряжению ГУН V2.
Практически и в зависимости от точных характеристик конкретного устройства или используемых схем, коэффициент усиления Ко, как он выражен в вышеприведенном уравнении, не является точной линейной функцией управляющего напряжения и частоты. Однако, как правило, он приблизительно линейный по некоторому диапазону величин. Кроме того, для целей проектирования в целом, Ко - нелинейная функция диапазона параметров цепи, которая может быть в целом выражена как
 ,
,
где
Vcc - напряжение питания, равное 3,3 В в цепи, представленной на фигуре 2,
N - число раз, когда частота ГУН делится по элементу 100,
ω - генератор круговой опорной частоты 32,
R1 - величина сопротивления резистора R1, показанного на схеме фигуры 2,
R2 - величина сопротивления резистора R2, показанного на схеме фигуры 2,
и где точные функциональные отношения, требуемые для целей проектирования интегральных микросхем, обозначенных как f в вышеупомянутом уравнении, могут быть определены на основании подробных данных, представленных в спецификациях продавца, и которые, например, представлены графически в документе "CD54/74HC4046A Texas Instruments", февраль 1998 года с поправками от мая 2000 года. В частности, в этом документе описана работа схемного элемента ФАПС, показанного на фигуре 2.
ГУН - середина диапазона управляющего напряжения 102, т.е.
Vcc/2, где Vcc - питающее напряжение, равное 3,3 V на схеме, представленной на фигуре 2.
Vref - опорное напряжение, которое является внутренним по отношению к микросхеме ФАПС.

где
Ra, R4 и С - элементы контурного фильтра
(соответствующие резисторам R9, R8 и емкости С7 на схеме фигуры 2),
t - время,
ζ - коэффициент затухания, который дается уравнением
где τ=R4·С
Приведенное выше уравнение имеет ведущий член, который умножен на член отклика системы, зависящий от времени. Последний член в конечном счете сокращается до нуля. Величина начального отклика, который приводит к запуску схемы, следовательно, пропорционален ведущему члену уравнения, и здесь также можно видеть, что этот член пропорционален скорости изменения емкости, деленной на общую емкость. Начальный отклик также обратно пропорционален собственной частоте схемы контура, что указывает на возможность того, что этот отклик больше по времени для схем, которые корректируются более медленно.
На фигуре 3 представлена блок-схема электроники датчика 40 в соответствии с альтернативным вариантом настоящего изобретения и включает обычные числовые позиции, которыми обозначены аналогичные или сходные элементы, описанные в связи с вариантом 10, показанным на фигуре 1. В этом варианте спусковая схема 40 основана на блоке сравнения напряжения 42. Этот вариант представляет собой альтернативный способ обнаружения объекта с использованием цепи управления фазовой автоподстройки частоты (ФАПС) 12.
Схема работает следующим образом. Как и в варианте 10, показанном на фигуре 1, среднее управляющее напряжение - напряжение, требуемое для того, чтобы ГУН 22 работал бы на той же самой частоте, после деления, что и генератор опорной частоты 32. Однако в этом варианте нет никакой цепи задержки по фазе и вместо этого ошибки сдвига фазы заставляют блок сравнения фазы/частоты 24 увеличивать или уменьшать управляющее напряжение 102 до тех пор, пока разность фаз не будет исправлена и доведена до нуля. В этом устройстве 40 сигнал фазовой погрешности от блока сравнения фазы/частоты 24 фильтруется первым контурным фильтром, который может включать цепь RC 44 и также фильтруется вторым фильтром, который может также включать цепь RC 105 и который имеет намного большую постоянную времени, чем первая цепь RC, и обеспечивает подачу опорного напряжения на блок сравнения 42. Как только управляющее напряжение 102 достигнет заранее установленного положительного порога напряжения в блоке сравнения 42, при обнаружении движущегося объекта в пределах зоны действия считывающих электродов 14 и 16, блок сравнения 42 обеспечивает запускающий выходной сигнал.
РАБОЧАЯ ЧАСТОТА
Рабочая частота датчика для дозатора жидкого мыла (не показан) - это частота ГУН, которая составляет приблизительно 0,5 МГц, (фактическая частота в 16 раз выше частоты генератора опорной частоты 32,768 kHz, которая равна 0,5244 МГц). Эта частота выбрана с расчетом, чтобы она была достаточно высокой с тем, чтобы рука человека всегда обнаруживалась бы датчиком как диэлектрический материал в противоположность проводнику, а иногда и диэлектрику в других материалах, которые могли бы вызвать изменения в рабочем диапазоне и общих рабочих характеристик. Эта проблема возникает вследствие того, что человек, вызывающий срабатывание дозатора, может быть либо электрически заземлен, либо изолирован от земли. Например, рука оператора, получающего мыло, может время от времени быть в контакте с заземленным металлическим объектом типа раковины или крана или соединяться с землей электрически через струю воды.
Для того чтобы рука человека воспринималась как диэлектрик, частота должна превышать время свободной релаксации заряда человеческого тела. Это время определяется как результат умножения сопротивления кожи по отношению к земле в омах на емкость тела в фарадах. Емкость взрослого человека составляет приблизительно 50 пикофарад. Сопротивление кожи между двумя руками изменяется в диапазоне от 100 килоом до нескольких мегом. Следовательно, постоянная времени RC может составлять всего 5 микросекунд, что соответствует частоте 0,2 МГц.
Рабочая частота 0,5 МГц была, следовательно, выбрана, чтобы иметь разумный запас.
Другие потенциальные области применения изобретения включают управление водопроводным краном. Эффективное использование емкостных датчиков для управления водопроводным краном может потребовать значительно более высоких частот порядка 10 МГц или выше. Это, в частности, отмечено в патенте США №5730165 и в других документах. Обоснование этому снова лежит в области временных характеристик цепи RC и имеет отношение к более высокой проводимости сливной среды.
Нет никаких фундаментальных проблем в изменении конструкции заявляемого датчика, чтобы он работал на более высоких частотах, если это желательно. Фактически, в той мере, в какой это касается рабочей частоты, современные устройства ФАПС могут работать в области нескольких гигагерц. Таким образом, эта конструкция может быть модифицирована любым специалистом в данной области техники, чтобы использовать датчик на любой желательной частоте, вплоть до нескольких гигагерц, в зависимости от условий практического применения.
На фигуре 4 показан моделированный дозатор жидкого мыла 50 с электродами 14, 16, выполненными из медной фольги и изолированными друг от друга для создания электрического поля между ними. Размещение электродов рядом друг с другом позволяет создать электрическое поле между этими двумя электродами, которое выходит за пределы поверхностей электродов и кривых между ними. Основание 52 также включает экранирующий электрод, который в этом образце выполнен из медной фольги и обернут вокруг внешней поверхности основания 52.
В этой конфигурации величина напряженности поля снижается нелинейно с расстоянием от электродов 14, 16, что также происходит с величиной изменения емкости из-за присутствия диэлектрического материала, например руки человека, в пределах этого поля. Такое расположение элементов датчика приводит к созданию так называемого краевого поля емкостного датчика. Как грубое приближение, интенсивность краевого электрического поля, как правило, быстро снижается на расстояниях, которые превышают общую ширину электродов 14, 16, которая в этом случае равна приблизительно 3 дюймам. Расстояние между передней и задней сторонами составляет 3,1 дюйма; расстояние между боковыми сторонами порядка 3,25 дюймов; зазор между электродами порядка 0,5 дюйма; зазор между электродами и экранирующей кромкой - 1/4 дюйма.
Было измерено изменение в емкости из-за присутствия руки на различных расстояниях от моделированного основания. На фигуре 5 показаны изменения в емкости для руки взрослого человека, удерживаемой на различном расстоянии по вертикали над основанием 50, когда экран 52 приближался и удалялся, что подтверждает это явление. Имеются два технических побочных эффекта при наличии заземленного экрана 52. Первый - это то, что он увеличивает общую емкость конструкции считывающего электрода на несколько пикофарад. Второй это то, что он шунтирует часть электрического поля, удаленного от зоны обнаружения, в результате чего емкость изменяется в диапазоне фиксированного расстояния. Это неизбежно для заземленного водопроводного крана, находящегося в непосредственной близости от считывающих электродов, и подтверждается экспериментальными данными, представленными на фигуре 5.
Следовательно, для этой конкретной физической конструкции экранирование увеличивает требуемую чувствительность датчика и, как подтверждено приведенными здесь данными испытаний, этот датчик имеет необходимую чувствительность. Если чувствительность когда-либо станет вопросом обсуждения для этого или других подобных областей применения, требующих аналогичных экранирующих электродов, то в альтернативном устройстве, в котором требуется чувствительность меньшей величины, экран должен быть разделен на две части и находится под тем же самым напряжением, что и считывающие электроды.
ХАРАКТЕРИСТИКА ДАТЧИКА И ДАННЫЕ СТЕНДОВЫХ ИСПЫТАНИЙ
Данные относятся к следующим категориям:
- характеристики в сравнении с известными небольшими скоростями изменения емкости;
- характеристики в сравнении с откликом системы на движение руки над основанием.
ДИНАМИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ЭКСПЕРИМЕНТАЛЬНЫЕ ДАННЫЕ
Было создано экспериментальное устройство, которое использовалось для снятия характеристик и как средство для создания диапазона известных и воспроизводимых изменений емкости при различных репрезентативных скоростях изменения емкости с различными масштабами времени, которые являются репрезентативными для движения руки, и с профилем времени изменения емкости, которые аппроксимируют пилообразный сигнал. Схема испытаний основана на плоскопараллельном конденсаторе, включающем два плоских параллельных электрода, которые номинально имеют площадь 5×5 см2 и разделены расстоянием 1 см. Диэлектрические испытательные образцы состояли из небольших квадратов чистого сплавленного кварца размером одной стороны квадрата 3/8 дюйма и толщиной 1 мм. Эти образцы использовались для экспериментального увеличения емкости. Данный материал имеет известную диэлектрическую постоянную 3,8.
Инкрементное увеличение емкости из-за ввода одного такого образца в область поля конденсатора было принято равным 6,3 пикофарады по данным фактических точных измерений конструкции и экспериментальных образцов при условии наличия однородного поля. Были разработаны средства для ввода образца в область поля и удаления из него с известной и постоянной скоростью. Эти средства включали установку образца на тонком пластмассовом диске, который пересекает поле и который вращается небольшим электрическим двигателем с известным числом оборотов в минуту. Таким образом, данная конструкция обеспечивает средство для моделирования скоростей изменения емкости, соответствующих движению руки.
Приведенные ниже скорости двигателя в оборотах в минуту использовались в условиях, когда экспериментальный образец был расположен на крайней внешней кромке пластмассового диска. Каждый оборот создает одну положительную величину dC/dt, когда образец входит в поле между пластинами, и одну отрицательную величину dC/dt, когда образец выходит из этого поля.
Поскольку каждый оборот дает одну положительную величину dC/dt и одну отрицательную величину dC/dt, устройство также позволяет проверить чувствительность датчиков к срабатыванию при различных величинах dC/dt и ложное срабатывание при различных величинах dC/dt. Это также полезно, поскольку для применения устройства в качестве дозатора жидкого мыла, датчик не должен срабатывать при удалении руки из области активизации датчика.
Следующие данные относятся приблизительно к 100 оборотам для каждой скорости:
Эти данные, взятые в сочетании с данными предыдущей таблицы, указывают, что датчик чувствителен к событиям, которые превышают +77 пф/с продолжительностью 82 микросекунды и 100% (-1%) успеха в этих испытаниях при обнаружении событий +107 пф/с продолжительностью 59 микросекунд.
Эти данные также подтверждают то, что датчик способен надежно обнаруживать движение небольшого диэлектрического объекта, отличного от руки. Данные также подтверждают, что датчик успешно функционирует там, где считывающие электроды расположены в виде плоскопараллельной конфигурации.
ЭКСПЕРИМЕНТАЛЬНЫЕ ДАННЫЕ ПРИ АКТИВИЗАЦИИ РУКОЙ
Для того, чтобы получить дополнительное доказательство практичности и пригодности датчика при применении для активизации бесконтактного дозатора жидкого мыла, был выполнен ряд испытаний по активизации датчика рукой. При этом было использовано моделированное основание дозатора жидкого мыла, включающее конфигурацию краевого поля со считывающими электродами, а также экранирующий электрод, как показано на фигуре 4.
Со ссылкой на фигуру 5 отметим, что требуемая скорость движения руки может быть грубо оценена для надежной активизации, приближая руку вертикально к датчику для его активизации на расстояниях 3, 2 и 1 дюйм. Техническая оценка может затем быть уточнена по фактическим данным для той же самой руки. Нижняя кривая указывает на изменение емкости из-за руки приблизительно на 5 пФ в диапазоне 3 дюймов, приблизительно на 12 пФ в диапазоне 2 дюйма и оценка 39 пФ в диапазоне 3 дюйма. Можно также отметить, что это изменение нарастает между начальным расстоянием руки около 5 дюймов и расстоянием активизации 3 дюйма и так далее. Чтобы скорость изменения была бы порядка 100 пФ/с, скорость руки должна быть порядка 100*2/5 дюймов в секунду = 40 дюймов в секунду для активизации при 3 дюймах (продолжительностью 50 микросекунд), около 100*2/12 дюймов в секунду = 17 дюймов в секунду для активизации при 2 дюймах (120 микросекунд) и около 100*2/39=5 дюймов в секунду для активизации при 1 дюйме (444 микросекунды). 5 дюймов в секунду - очень медленная скорость руки, тогда как скорость от 25 до 40 дюймов в секунду представляется более типичной.
Схема датчика была соединена с моделируемым основанием и проверена для активизации рукой, перемещающейся к основанию с нормальной расчетной скоростью и для повторной активизации, когда рука уже находится в пределах области активизации (десять раз для каждого случая).
Следует отметить, что вышеописанные испытания являются техническими или "организованными" в том смысле, что были предприняты меры, чтобы держать руку плоской и на определенном уровне, что не будут делать обычные пользователи дозатора жидкого мыла, Точно так же, скорость движения руки является важным фактором, и это основано на оценке того, что может быть типичным и что изменится при фактическом использовании системы. Можно видеть, что согласно этим данным эффективное расстояние активизации находится в пределах от 2,5 до 3 дюймов, и что это согласуется с технически основанной оценкой. Можно также видеть, что имелось нулевое число ложных запусков схемы, означающих, что датчик никогда не запускался при удалении руки из зоны активизации.
Электрический ток, отбираемый для схемы 10, является низким и, в основном, значительно меньше, чем 1 мА при низком напряжении. Это демонстрирует пригодность датчика для работы в течение длительного срока, используя щелочные батареи. Это выгодно для областей применения, где источником питания является аккумуляторная батарея, которая предпочтительно предназначена для непрерывной работы в течение длительного периода без необходимости частой замены батареи.
Хотя выше была описана одна система управления в соответствии с настоящим изобретением с целью иллюстрации способа, по которому изобретение может быть практически и выгодно использовано, следует отметить, что изобретение не ограничивается данным вариантом. Соответственно, любые и все модификации, изменения или эквивалентные замены оборудования, которые могут осуществить специалисты в данной области, должны рассматриваться как входящие в объем изобретения, как это определено формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЕМКОСТНОГО ТИПА ДЛЯ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ | 2015 |
|
RU2613759C1 |
| ДИЭЛЬКОМЕТРИЧЕСКИЙ ВЛАГОМЕР | 1991 |
|
RU2045053C1 |
| СХЕМА ОБНАРУЖЕНИЯ ПОТОКА | 2019 |
|
RU2793146C2 |
| СИНТЕЗАТОР СЕТКИ ЧАСТОТ НА БАЗЕ КОНТУРА ФАПЧ С КОМПЕНСАЦИЕЙ ПОМЕХ ДРОБНОСТИ | 2012 |
|
RU2491713C1 |
| ОБНАРУЖЕНИЕ СКРЫТОГО ДИЭЛЕКТРИЧЕСКОГО ОБЪЕКТА | 2011 |
|
RU2586269C2 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2279634C2 |
| Устройство для проведения хирургических операций с применением ультразвуковых колебаний | 2021 |
|
RU2774586C1 |
| СТАБИЛИЗИРОВАННЫЙ ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ | 2011 |
|
RU2474948C1 |
| Способ широтно-импульсного регулирования резонансного преобразователя с фазовой автоподстройкой частоты коммутации | 2017 |
|
RU2661495C1 |
| ДЕТЕКТОР КОНТАКТА С КОЖЕЙ | 2011 |
|
RU2565595C2 |
Изобретение относится к системам автоматического управления. Система емкостного датчика для управления работой устройства в ответ на скорость изменения емкости из-за движения ближайшего объекта содержит два считывающих электрода, расположенных на поверхности и цепь фазовой синхронизации, включающую генератор, управляемый напряжением, и блок сравнения фазы и частоты, включенный между считывающими электродами, а также радиочастотную схему, служащую для обеспечения рабочей частоты для считывающих электродов. Контурная схема, включающая генератор опорной частоты, обеспечивает фиксированные опорные частоты для слежения за цепью фазовой синхронизации. Цепь задержки по фазе, включенная между указанным блоком сравнения фазы и частоты и указанным генератором, управляемым напряжением, подает сигналы для формирования колебаний, управляемых напряжением, которые формируются перед формированием колебаний, создаваемых генератором опорной частоты. Спусковая схема обеспечивает выходные управляющие сигналы в ответ на изменение в сдвиге фазы и в указанной рабочей частоте. 3 н. и 23 з.п ф-лы, 5 ил.
| US 4661797 А, 28.04.1987 | |||
| RU 2053564 С1, 27.05.1992 | |||
| Отводка ремня для банкаброша | 1928 |
|
SU13484A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| US 5122754 А, 16.06.1992. | |||

