1. Область техники, к которой относится изобретение
Изобретение относится к области судостроения, а именно к разработке многокорпусных судов с заглубленными корпусами и малой площадью ватерлинии.
2. Уровень техники
Эволюция технических решений в области судостроения всегда отражала стремление к созданию судна, обладающего при заданной скорости возможно более низкой потребностью в топливе, хорошей мореходностью, т.е. умеренными качкой и потерей скорости на волнении, высокой комфортабельностью (что предполагает увеличенную площадь палуб надстройки, низкие ускорения при качке на волнении, минимальный уровень шума и вибрации).
Одно из направлений развития водоизмещающих судов составили многокорпусные суда. Наибольшее распространение получили двухкорпусные суда - катамараны и, в меньшей степени, трехкорпусные суда - тримараны (последние, в основном, в качестве океанских спортивных парусников).
В числе катамаранов выделились варианты с двумя полупогруженными корпусами, каждый из которых образован полностью погруженным обтекаемым корпусом (гондолой), соединенным посредством вертикальных стоек, пересекающих поверхность воды, с надводной платформой, на которой размещен блок надстроек.
Конструктивная схема судна с одним заглубленным корпусом впервые защищена патентом в 1880 г. Основной особенностью этого решения было применение резко зауженной действующей ватерлинии, в результате чего поперечные сечения судна приобретали каплеобразную форму [A Brief Chronology of Swath Development, Интернет-сайт www/swath.com/history.htm].
Английский патент 1946 г. содержал идею применения двух глубоко погруженных корпусов с надводной соединительной платформой [ссылка выше].
В американском патенте 1962 г. приведена конструктивная схема полупогруженного однокорпусного судна с высокой соединительной стойкой (или двумя стойками) между надводной платформой и обтекаемым подводным корпусом [ссылка выше].
Схема полупогруженного двухкорпусного судна получила развитие в американском патенте 1969 г., защитившем схему, которая с целью уменьшения волновой составляющей сопротивления предусматривала, в частности, разделение каждого заглубленного корпуса на два, расположенных в эшелонном порядке [патент США №3447502 «Морское судно», кл. МПК В 63 В 1/40, 1969 г.]. Схема получила наименование «трисек» (Фиг.1).
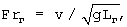
Американским патентом 1971 г. в конструкцию «трисека» дополнительно была введена система подводных крыльев, установленных на погруженных корпусах с целью стабилизации движения судна на высоких скоростях (Фиг.2) [патент США №3623444 «высокоскоростное судно с погруженными корпусами», кл. МПК В 63 В 1/10, 1971 г.]. Кроме того, указанный патент содержит, в частности, положения о том, что морское судно, остойчивое статически и динамически, включает:
- По меньшей мере, две стойки, пересекающие поверхность воды, поперечные и продольные расстояния между которыми таковы, что обеспечивают судну поперечную и продольную остойчивость, а также устойчивость на курсе.
- Балластные цистерны, расположенные в каждом из погруженных корпусов, которые обеспечивают судну, путем приема и откачки воды, изменение осадки.
- Также с целью обеспечения остойчивости и устойчивости на курсе в конструкции судна предусмотрена множественная система стоек (plurality of struts).
К этому времени в судостроительных кругах закрепился термин SWATH (Small Waterline Area Twin Hull), что означает «двухкорпусник с малой площадью ватерлинии». В отечественной практике принято говорить о судне с малой площадью ватерлинии (СМПВ).
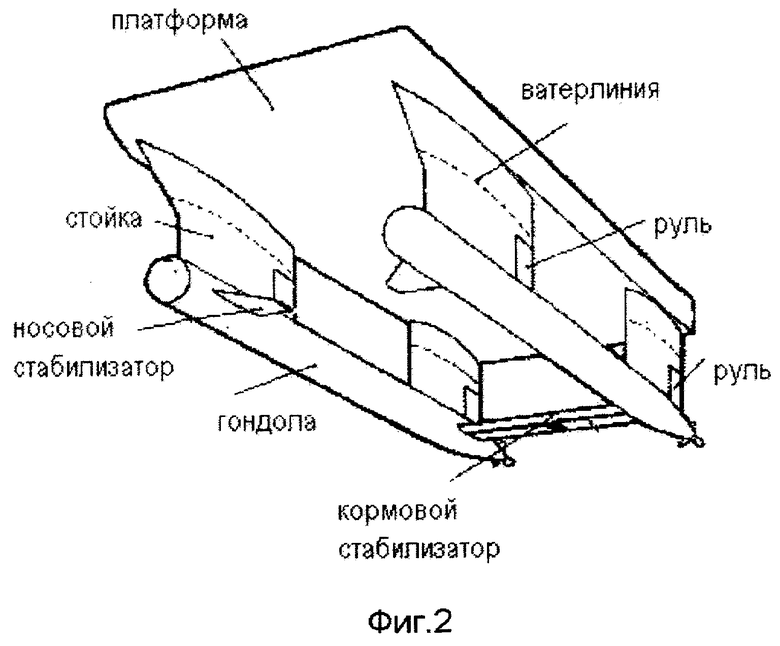
К настоящему времени практически выработан конструктивный тип полупогруженного катамарана или SWATH (Фиг.3) с подводными сигарообразными корпусами (гондолами), сообщенными с надводной платформой посредством одной сплошной или двух разрезных (отстоящих друг от друга) стоек и снабженными системой стабилизации качки в виде горизонтальных рулей.
Реально построенные полупогруженные катамараны подтвердили на практике преимущества большой площади палуб, пониженной бортовой качки, некоторого снижения мощности энергетической установки. Общее число построенных в мире судов типа SWATH достигает 50. Их водоизмещение варьируется от нескольких тонн до 3000 тонн, а скорость составляет от 10 до 30 узлов, причем скорость полупогруженных катамаранов водоизмещением более 500 тонн не превышает 15 узлов.
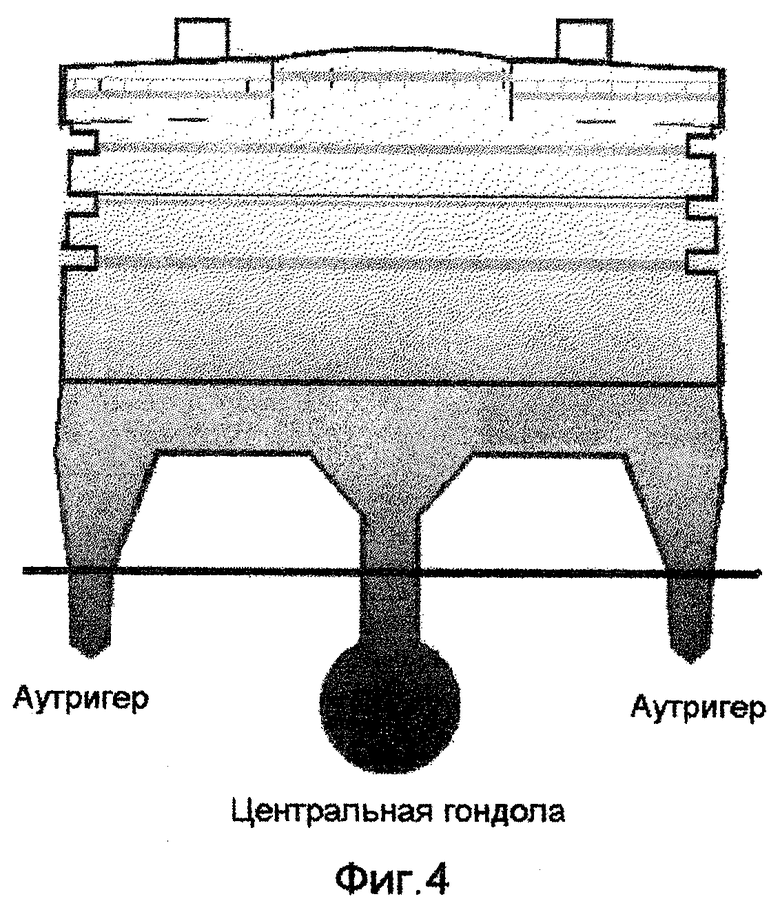
Число технических решений, относящихся к трехкорпусным судам - тримаранам и, тем более, полупогруженным, значительно меньше. Известны лишь единичные патенты. К ним относятся патенты 1930 и 1971 г.г., где упомянута трехкорпусная схема. Исследованиями 1980-ых годов установлено, что указанная схема имеет существенные преимущества по сравнению с двухкорпусной при сравнении зависимостей мощности главных двигателей от скорости для СМПВ одного и того же водоизмещения. Показано, что тримараны обеспечивают значительное снижение волнового сопротивления (не менее чем в 2 раза, на расчетной скорости), правда, ценой увеличения сопротивления трения (на 15%). Тем не менее, в результате это дает почти 20% экономии мощности [Tri-Hull Development, Интернет-сайт www/swath.com/history.htm]. Технологические усложнения, связанные с постройкой полупогруженных тримаранов, до настоящего времени препятствовали их появлению на практике. Опубликованный пример возможного воплощения идеи тримарана показан на Фиг.4. В этом варианте применена схема «увеличенный центральный корпус+боковые аутригеры», упомянутая в рассмотренном выше патенте США №3623444.
Как двухкорпусные, так и трехкорпусные СМПВ реализуют, в первую очередь, идею т.н. «эффекта избежания», т.е. снижения волнового сопротивления путем удаления водоизмещающих объемов от водной поверхности. По этой же причине достигается уменьшение качки, поскольку возмущающие силы от морского волнения с заглублением объемов уменьшаются, а интенсивная качка смещается в зону волнения с большими периодами, которое встречается относительно редко (имеет малую повторяемость). Кроме того, в случае тримарана при продольном сдвиге центрального корпуса относительно боковых используется т.н. «эффект нейтрализации», т.е. благоприятного взаимодействия (интерференции) волновых систем, создаваемых погруженными корпусами.
Вместе с тем, существующие технические решения не в полной мере реализуют потенциальные возможности многокорпусной конструкции полупогруженного судна. В основном, это касается использования «эффекта нейтрализации», который в известных технических решениях реализуется для погруженных корпусов без учета влияния стоек. Опубликованы лишь ограниченные сведения о многокорпусных СМПВ (Справочник по теории корабля: Том 1. Под ред. Я.И.Войткунского. - Л.: Судостроение, 1985, с.388-390; Справочник по малотоннажному судостроению. Сост. Б.Г.Мордвинов - Л.: Судостроение, 1987, с.91-92), не дающие определенных рекомендаций о геометрических характеристиках судов этого типа.
Регулируемая стабилизация качки полупогруженного судна (ППС) известными устройствами типа горизонтальных рулей не достижима при отсутствии хода. Применение балластной системы ограничено задачей регулирования осадки и не пригодно для стабилизации качки вследствие инерционности и нестабильности процессов приема и откачки водного балласта.
Среди отечественных патентов данному предложению близки:
- Патент №2084368 «Многокорпусное судно» (кл. МПК В 63 В 1/10, 1997 г.), в котором подводная часть судна образована тремя погруженными поплавками (эквивалентами гондол) - одним центральным и двумя боковыми с определенными количественными соотношениями их размеров, причем боковые поплавки выполнены с балластом (вид балласта не оговорен). Указанный патент не реализуют потенциальные возможности использования «эффекта нейтрализации» с учетом влияния множественности стоек.
- Патент №2169680 «Аутригер многокорпусного судна» (кл. МПК В 63 В 1/10, 2001 г.), в котором рассмотрено устройство аутригера (эквивалента бокового полупогруженного модуля), форма единственной стойки которого выполнена с рядом геометрических условий. Указанный патент не реализуют потенциальные возможности использования «эффекта нейтрализации» с учетом влияния множественности стоек.
Предлагаемое изобретение имеет целью восполнить отмеченные выше пробелы. В качестве наиболее близкого аналога (прототипа) выбран патент США №3623444.
3. Раскрытие изобретения
В соответствии с целью предлагаемого изобретения рассматриваются два аспекта проблемы оптимизации характеристик многокорпусного полупогруженного судна (в дальнейшем МКППС):
- Реализация условий нейтрализации волнообразования и минимизации волнового сопротивления внутри системы погруженные корпуса (гондолы) - вертикальные соединительные стойки.
- Реализация устройств, обеспечивающих минимизацию качки на волнении путем регулирования формы подводной части полупогруженного судна.
Решение первой задачи достигается тем, что с целью минимизации волнообразования и волнового сопротивления многокорпусного судна при его прямолинейном движении на тихой воде система полупогруженных корпусов составлена из геометрически подобных модулей, каждый из которых образован сочетанием полностью погруженного обтекаемого удлиненного корпуса (гондолы) и нечетного множества (по меньшей мере, равного трем) вертикальных стоек (мультистоек), пересекающих поверхность воды, причем стойки в продольной плоскости расположены симметрично относительно наибольшего поперечного сечения гондолы, длина стоек уменьшена по мере удаления от средней стойки к оконечностям гондолы, продольные интервалы между стойками выполнены равными, по меньшей мере, длине более короткой из прилегающих к интервалу стоек, и высота стоек выполнена равной предельной высоте волн, для плавания на которых судно предназначено.
При этом система полупогруженных корпусов образована сочетанием М эшелонов, по N модулей в каждом эшелоне, с продольными отстояниями AN между наибольшими сечениями (мидель-шпангоутами) гондол в каждом эшелоне, при этом указанные эшелоны расположены с поперечными отстояниями Вм между продольными плоскостями симметрии (диаметральными плоскостями) модулей, образующих каждый эшелон, причем отстояния AN выполнены равными, по меньшей мере, длине наиболее короткой гондолы, а отстояния Вм выполнены равными, по крайней мере, длине наиболее короткой гондолы.
Преимущественными вариантами реализации изобретения являются:
- тримаран-МС (тримаран-мультистойки), образованный тремя модулями (N=1, М=3), расположенными параллельно друг другу, но с продольным выдвигом центрального модуля увеличенного объема относительно остальных одинаковых модулей, а также единой надводной платформой, днищевая часть которой выполнена килеватой;
- тетрамаран, образованный двумя парами (N=2, М=2) одинаковых модулей, расположенными друг за другом с продольным сдвигом, а также единой надводной платформой, днищевая часть которой выполнена килеватой.
Решение второй задачи достигается тем, что с целью сохранения заданного положения (стабилизации) платформы судна над уровнем водной поверхности путем изменения объема гондол в каждом модуле смонтированы надувные эластичные емкости с возможностью изменения их объема при качке судна и соответствующего изменения общего погруженного объема и осадки судна, при этом воздушные объемы, заключенные внутри надувных эластичных емкостей, сообщены с коллекторами внутри подвижных элементов корпуса судна, а также с магистралями подвода сжатого воздуха внутри корпуса.
4. Краткое описание иллюстраций.
Фиг.1. Полупогруженное многокорпусное судно по патенту США №3447502 (трисек).
Фиг.2. Полупогруженное двухкорпусное судно по патенту США №3623444 (прототип).
Фиг.3. Общий вид полупогруженного катамарана типа SWATH (проект).
Фиг.4. Возможное воплощение конструкции полупогруженного тримарана (проект).
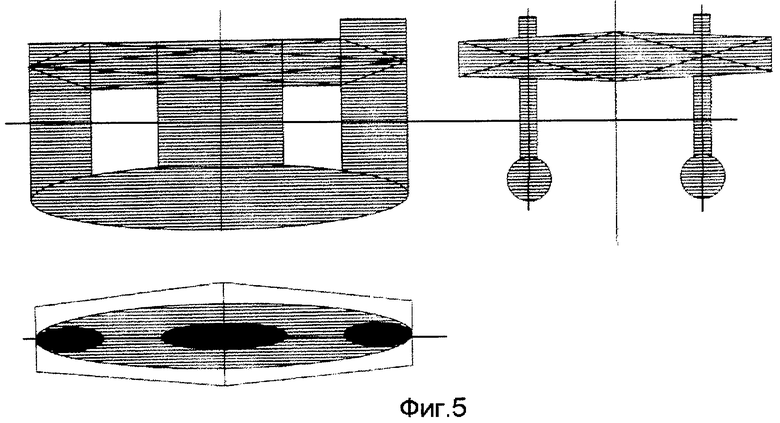
Фиг.5. Схема мономарана - однокорпусного ППС.
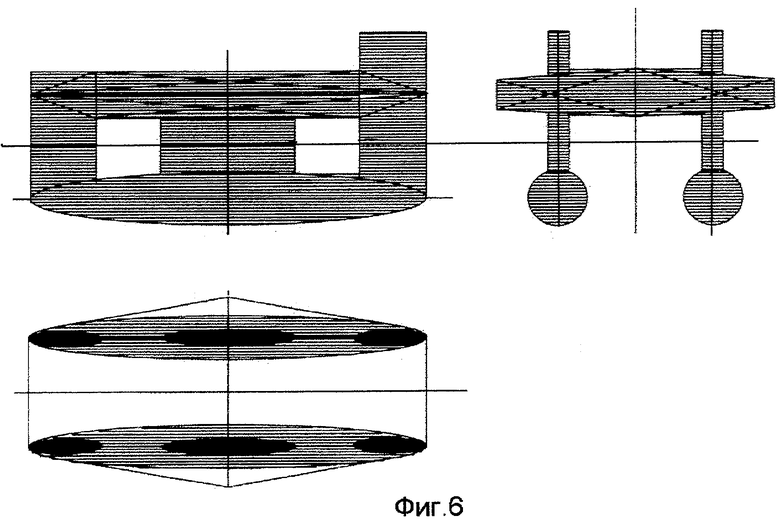
Фиг.6. Схема димарана - двухкорпусного ППС с мультистойками.
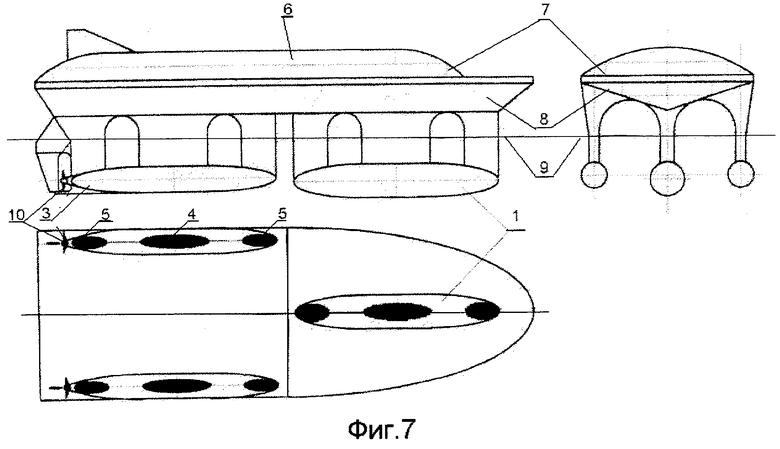
Фиг.7. Проекции внешнего вида предлагаемого тримарана.
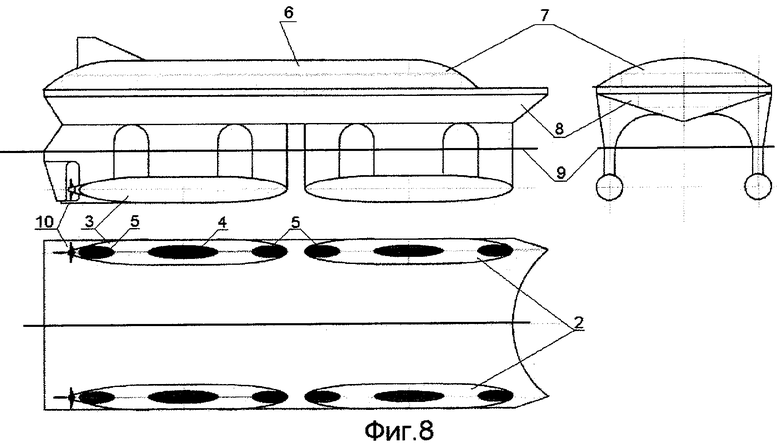
Фиг.8. Проекции внешнего вида предлагаемого тетрамарана.
Фиг.9. Общий вид предлагаемого тримарана - МС.
Фиг.10. Общий надводный вид предлагаемого тримарана - МС.
Фиг.11. Общий вид предлагаемого тетрамарана.
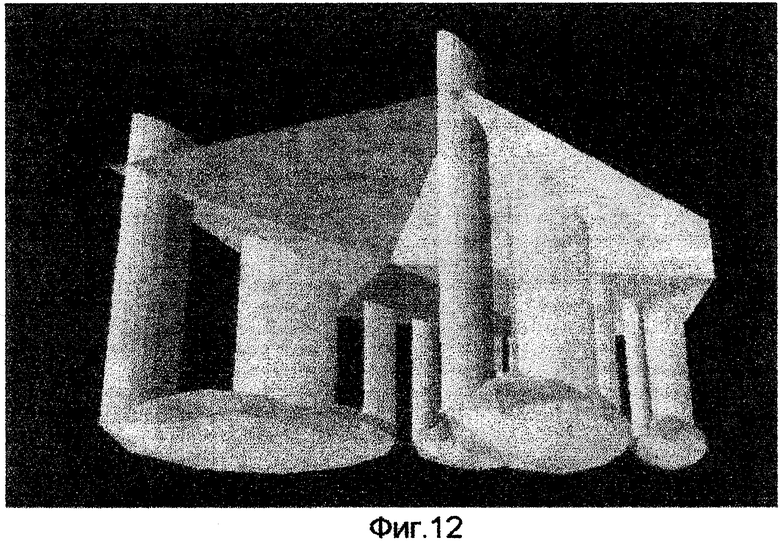
Фиг.12. Общий надводный вид предлагаемого тетрамарана.
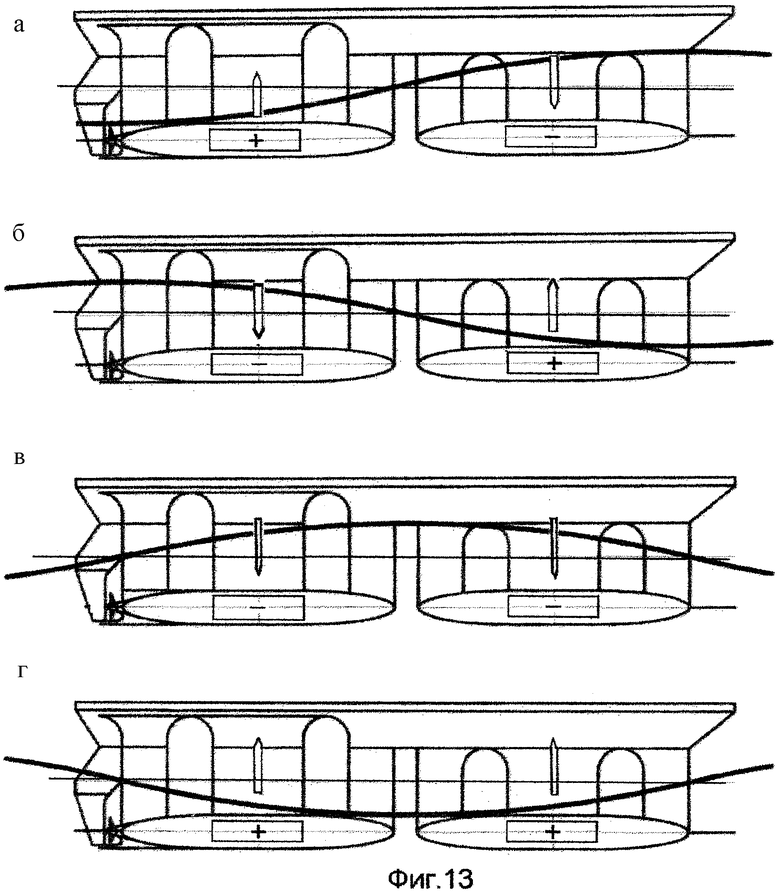
Фиг.13. Взаимодействие многокорпусного ППС со взволнованной поверхностью воды при работе предлагаемого устройства стабилизации.
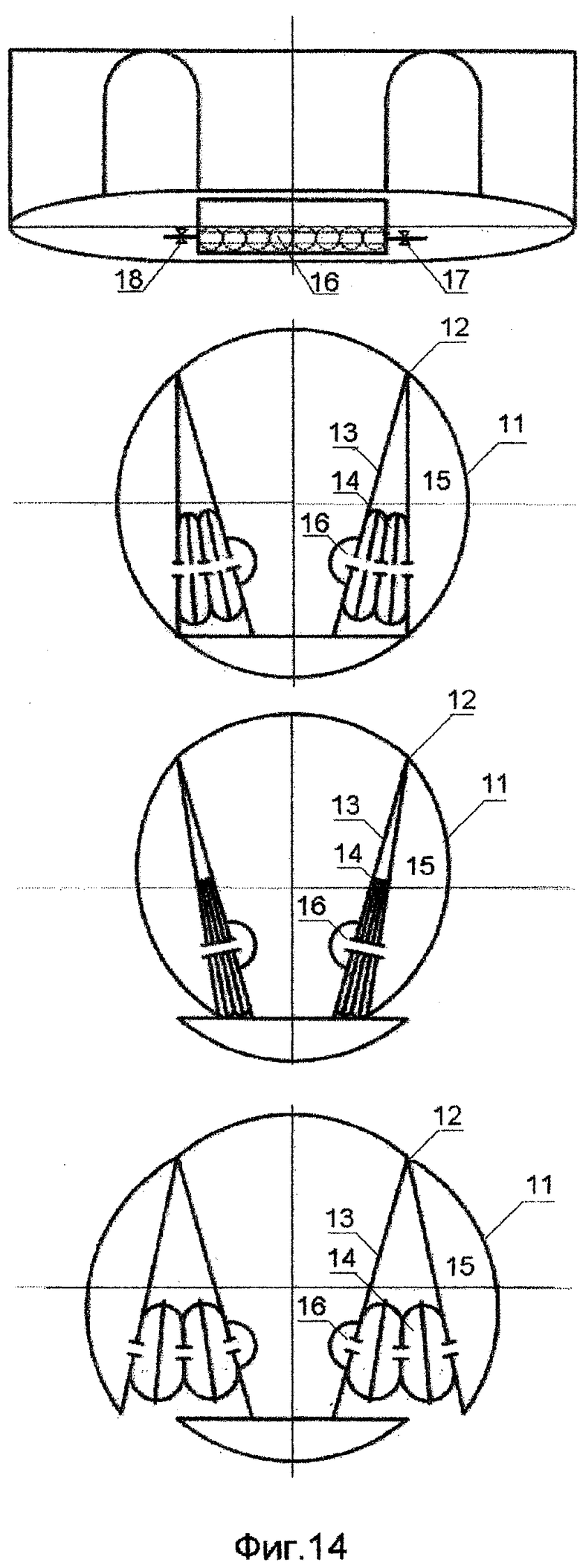
Фиг.14. Проекции предлагаемого устройства стабилизации качки многокорпусного ППС.
5. Осуществление изобретения
Возможность снижения волнообразования и волнового сопротивления при движении судов в эшелонном порядке (каравана судов) отмечалась ранее из теоретических соображений [А.А.Костюков. Сопротивление воды движению судов. - Л.: Судостроение, 1966, с.439-441]. Однако утверждалось, что гипотетические суда в составе этого каравана должны располагаться симметрично относительно среднего судна наибольшей ширины, иметь равную длину и уменьшающуюся ширину по мере удаления от среднего судна.
Авторами данного предложения получены расчетные результаты, согласно которым эшелонная последовательность стоек по условиям нейтрализации волнообразования при движении модуля гондола - стойки может быть ограничена нечетным множеством, не менее трех, стоек ширины, равной, по меньшей мере, полуширине гондолы, причем крайние стойки расположены симметрично относительно средней стойки увеличенной длины.
Принцип нейтрализации волн, создаваемых при движении систем волноообразующих объектов, неоднократно отмечался как средство значительного уменьшения сопротивления воды [см., например. В.Я.Ткачев. Исследование влияния волновой интерференции на ходовые качества морских транспортных судов. Труды ЦНИИ им. акад. А.Н.Крылова, вып.220, 1965, с.3-20].
В частности, при сопоставлении волнового сопротивления модуля гондола - множественные раздельные стойки (мультистойки) с волновым сопротивлением модуля гондола - единая сплошная стойка (при равнообъемности как гондол, так и стоек обоих модулей) получено, что модуль с мультистойками в определенном диапазоне скоростей имеет преимущество. Это же относится и к двум параллельно расположенным модулям, т.е. к схеме полупогруженного катамарана (Табл.1).
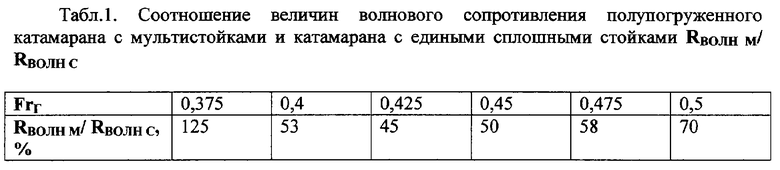
Примечание. Соотношение величин волнового сопротивления полупогруженного катамарана с мультистойками и такого же катамарана с едиными сплошными стойками определено в зависимости от относительной скорости (числа Фруда):
где: v - скорость судна, м/с,
Lг - длина гондолы, м,
g - ускорение силы тяжести, м/с2.
Таким образом, отличием предлагаемой конструкции МКППС является взаимное расположение, число и соотношение размеров вертикальных стоек, соединяющих погруженные корпуса (гондолы) и надводную платформу судна.
Модифицированные согласно данному предложению конструкции МКППС представлены следующими основными вариантами:
- Однокорпусное полупогруженное судно с мультистойками (мономаран) (Фиг.5).
- Двухкорпусное полупогруженное судно с мультистойками (димаран) (Фиг.6).
- Трехкорпусное полупогруженное судно с мультистойками (тримаран - МС) (Фиг.7).
- Четырехкорпусное полупогруженное судно с мультистойками (тетрамаран) (Фиг.8).
Из указанных вариантов в качестве наиболее оптимальных выделены тримаран-МС и тетрамаран. Такой вывод следует также из анализа данных о размерах различных вариантов МКППС (Табл.2), имеющих одинаковое водоизмещение (в данном примере равное 1000 т).
Сравнение размеров МКППС и традиционного судна
Рассматривая варианты МКППС равного водоизмещения при движении с одинаковой скоростью, можно видеть, что они имеют значительно отличающиеся размеры. Особенно выделяется димаран, длина которого значительно меньше, чем у остальных типов МКППС. Это означает, что, будучи сопоставимым с тримараном и тетрамараном по ходовым качествам, димаран в большей степени подвержен качке, поскольку он, имея меньшие размеры, испытывает качку на волнении меньшей балльности, повторяемость которого выше.
Расстояние между продольными плоскостями симметрии гондол (поперечный клиренс) назначается из условия нейтрализации системы расходящихся волн ППС и, по меньшей мере, не превышает для всех возможных вариантов МКППС длину наиболее короткой гондолы.
Расстояние между наибольшими поперечными сечениями гондол (продольный выдвиг) в составе тримарана и тетрамарана назначается из условия нейтрализации системы поперечных волн МКППС и зависит от скорости судна. Расчетным путем определено, что каждому диапазону скоростей соответствует свой оптимальный продольный выдвиг с тенденцией к нарастанию с увеличением скорости. В частности, для диапазона скоростей, соответствующего числам Frг=0,4-0,5, продольный выдвиг, по крайней мере, превышает длину наиболее короткой гондолы.
Так, например, по данным, приведенным в Табл.3, видно, что при конкретном продольном сдвиге, равном 1,1 длины гондолы, увеличение скорости хода МКППС, имеющих равное водоизмещение 1000 т, относительно скорости хода традиционного судна с таким же водоизмещением, составляет 13-16% для всех рассматриваемых вариантов многокорпусных ППС с мультистойками.
Прирост скорости МКППС при сравнении с традиционным судном
мощность, кВт/т
Указанный рост скорости не изменяется в диапазоне удельной пропульсивной мощности (мощности, потребной для движения, отнесенной к водоизмещению), равной 1,5-2,5 кВт/т. При движении с равной скоростью экономия пропульсивной мощности у всех МКППС составляет от 50% для тримарана-МС до 55% для димарана и тетрамарана, по сравнению с эквивалентным по водоизмещению традиционным судном.
Установлено, что каждому сочетанию размеров МКППС соответствует свой диапазон оптимальных скоростей и пропульсивной мощности.
Преимущественные варианты изобретения (тримаран и тетрамаран) выполнены в соответствии с проекциями на Фиг.7-8. На каждой иллюстрации показаны: а) вид сбоку, б) вид спереди, в) вид сверху (внутренние планы надстройки не показаны). Общие надводный и подводный виды преимущественных вариантов представлены на Фиг.9-10 (тримаран - МС) и на Фиг.11-12 (тетрамаран).
Система погруженных модулей состоит из носовой гондолы 1 (для тримарана) и двух носовых гондол 2 (для тетрамарана), кормовых гондол 3, а также соединительных стоек: средней 4 и крайних 5, платформы 6, образованной верхней частью 7 и нижней частью 8, которая имеет килеватую форму. Стойки пересекают поверхность воды 9 преимущественно на половине своей высоты. Средняя стойка 4 имеет наибольшую длину и отстоит от крайних стоек 5 с интервалом, равным, по меньшей мере, длине крайней стойки. В кормовой оконечности каждой кормовой гондолы 3 установлен движительно-рулевой комплекс 10.
Как указывалось выше, по мореходности преимущество имеют тримаран-МС и тетрамаран. Это преимущество нарастает в случае применения предлагаемого устройства стабилизации качки МКППС.
Его действие основано на принципе адаптивного регулирования подводного объема МКППС.
Известно, что интенсивность качки зависит от того, насколько близки величины периодов собственных колебаний судна и периода волновых возмущений, т.е. насколько велико приближение к условиям резонанса колебаний. В этой связи существенна площадь действующей (конструктивной) ватерлинии (КВЛ), т.е. плоскости пересечения стоек МКППС с водной поверхностью. Чем меньше эта площадь, тем выше величина периода собственных колебаний. При увеличении периода собственных колебаний судна наступление качки смещается в область более длинных волн, повторяемость которых невелика.
Учитывая особенности конструкции МКППС, можно приближенно свести качку каждого отдельного модуля к вертикальному его перемещению относительно уровня поверхности воды. Амплитуда такого перемещения Zm при малой величине отношения периода волны к периоду собственных вертикальных колебаний модуля К=Тв/Tz приближенно пропорциональна К2.
До тех пор пока К мало, устройства стабилизации в качестве успокоителей качки не используются. При движении МКППС устройства стабилизации выполняют и другую роль, а именно, обеспечивают уменьшение осадки судна при движении на мелководье и при подходе к причалу.
Адаптивное регулирование подводного объема МКППС обеспечивается изменением формы гондол путем заполнения воздухом надувных эластичных емкостей, находящихся в нишах под подвижными участками обшивки, выполненными с возможностью поворота относительно оси своей подвески. Адаптивность их действия состоит в том, что временной интервал заполнения емкостей воздухом согласован с периодом волны, создавая восстанавливающий момент, действующий противоположно возмущающему моменту. Соответствующая ситуация поясняется на Фиг.13 на примере тетрамарана. При прохождении судна через склон волны оно сохраняет неизменное пространственное положение в результате того, что гондолы одной оконечности погружаются навстречу подъему поверхности воды (объем уменьшен, знак «-»), а гондолы другой оконечности всплывают, удаляясь от поверхности воды (объем увеличен, знак «+») (Фиг.13, а) и б)). Направление движения гондол показано стрелками. При прохождении судна через вершину или впадину волны гондолы обеих оконечностей движутся в одном направлении: вверх (на впадине волны), вниз (на вершине волны) (Фиг.13, в) и г)).
Устройство стабилизации работает на принципе изменения объема подводной части МКППС в соответствии с изменением внешнего давления, действующего на поверхность гондолы. Его конструкция представлена на Фиг.14. Элемент 11 оболочки корпуса гондолы в виде цилиндрического сегмента выполнен подвижным, шарнирно подвешенным вдоль верхней кромки 12. В нерабочем положении этот элемент закреплен на оболочке корпуса замком. При появлении качки замок дистанционно открывают, и подвижный элемент оболочки приобретает свободу угловых перемещений. Объем между подвижным элементом 11 и опорной стенкой 13 заполнен эластичной надувной емкостью 14 в виде многосекционной пневмоподушки, закрепленной с обоих торцов соответственно на подвижном элементе 11 и на опорной стенке 13, причем объем емкости сообщен через клапанное устройство с коллектором 15 внутри подвижного элемента 11, а через опорную стенку 13 - с магистралью 16 системы подвода сжатого воздуха. При движении МКППС без качки в системе коллектор-пневмоподушка с помощью подвода сжатого воздуха поддерживается давление, необходимое для компенсации внешнего давления на подвижный элемент 11 для сохранения его нейтрального нерабочего положения (без изменения круговой формы сечения гондолы) и фиксации этого элемента замком.
Адаптация формы гондолы к волновым возмущениям не является полностью саморегулируемой. Система автоматизированного управления работой устройства стабилизации обеспечивает согласование относительного движения МКППС и поверхности волн по принципу противофазы (синхронное движение модуля навстречу подъему уровня воды и, наоборот, удаление модуля от понижающегося уровня воды). Управление осуществляется посредством подключения надувных емкостей к воздушным магистралям 16. В нагнетающей магистрали установлен впускной клапан 17, в откачивающей магистрали установлен выпускной клапан 18.
При появлении качки подвижный элемент 11 совершает угловые колебания в режиме слежения за изменением уровня поверхности воды. При прохождении над гондолой вершины волны отклонение подвижного элемента под действием увеличенного внешнего давления от нейтрального положения происходит в сторону опорной стенки 13, и объем гондолы уменьшается. При этом воздух из сдавливаемой емкости 14 перемещается в коллектор, создавая в нем повышенное давление. Напротив, при прохождении впадины волны, когда внешнее давление падает, воздух под действием повышенного внутреннего давления в коллекторе 15 переходит в емкость 14, что сопровождается отклонением подвижного элемента 11 во внешнюю сторону от нейтрального положения, и объем гондолы увеличивается. Контролируемое подключение воздушной магистрали 16 при управлении клапанами 17 и 18 позволяет поддерживать режим изменения объема модулей МКППС в противофазе волновым возмущениям. Каждый отдельно взятый модуль МКППС меняет свой объем таким образом, что возмущающее воздействие волны нейтрализуется, и модуль не испытывает качки, или, при накоплении неучтенных фазовых сдвигов, испытывает значительно меньшую качку. Поскольку устройство стабилизации на каждом модуле функционирует автономно, результирующая качка всех модулей, а следовательно, и качка МКППС в целом минимизируется.
При встрече с волнением предельной интенсивности, когда высота волны превышает высоту стоек, МКППС имеет возможность перейти в режим штормования, погрузившись на полную высоту стоек. В этом случае килеватая форма нижней части платформы способствует снижению нагрузок при соударении с поверхностью воды.
Расчет показывает, что затраты мощности на работу системы автоматизированного управления составляют не более 5-6% от мощности на движение МКППС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДВИЖЕНИЯ СУДНА НА ПОГРУЖЕННЫХ ОПОРАХ | 2008 |
|
RU2375238C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ СУДНА НА ПОГРУЖЕННЫХ ОПОРАХ | 2008 |
|
RU2375239C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ СУДНА НА ПОГРУЖЕННЫХ ОПОРАХ | 2008 |
|
RU2374121C1 |
| Стабилизированный корпус однокорпусного килевого парусного/парусно-моторного судна | 2015 |
|
RU2623348C1 |
| ВОЛНОСТОЙКИЙ САМОХОДНЫЙ КАТАМАРАННЫЙ КОМПЛЕКС | 2008 |
|
RU2398705C2 |
| СУДНО НА ПОДВОДНЫХ КРЫЛЬЯХ | 1991 |
|
RU2046050C1 |
| ВОЛНОСТОЙКАЯ МОРСКАЯ ГРУЗОПОДЪЁМНАЯ ПЛАТФОРМА (ВМГП) | 2014 |
|
RU2561491C1 |
| АУТРИГЕР МНОГОКОРПУСНОГО СУДНА | 1999 |
|
RU2169680C2 |
| ПОЛУПОГРУЖНАЯ МОРСКАЯ ПЛАТФОРМА ПОВЫШЕННОЙ ВОЛНОСТОЙКОСТИ | 2001 |
|
RU2191132C1 |
| СКОРОСТНОЕ "РАССЕКАЮЩЕЕ ВОЛНЫ" МНОГОКОРПУСНОЕ СУДНО | 1998 |
|
RU2144882C1 |
Изобретение относится к судостроению и касается создания многокорпусных судов с малой площадью ватерлинии. Многокорпусное полупогруженное судно (МКППС) выполнено с использованием средств нейтрализации волнообразования судна при движении на тихой воде. Система водоизмещающих корпусов (гондол) составлена из геометрически подобных модулей, каждый из которых образован сочетанием полностью погруженного обтекаемого удлиненного корпуса (гондолы) и множества вертикальных стоек (мультистоек), пересекающих поверхность воды, при этом их число, взаимное расположение и размеры заданы в соответствии с условиями достижения технического результата, который заключается в уменьшении волнообразования и волнового сопротивления при движении МКППС. В составе МКППС предложено также устройство стабилизации качки и регулировки осадки с возможностью изменения общего погруженного объема и осадки судна путем регулировки объемов, заключенных внутри надувных эластичных емкостей, расположенных под подвижными участками поверхности гондол МКППС. Технический результат состоит в уменьшении качки на волнении и в обеспечении условий плавания МКППС на мелководье. 3 з.п. ф-лы, 14 ил., 3 табл.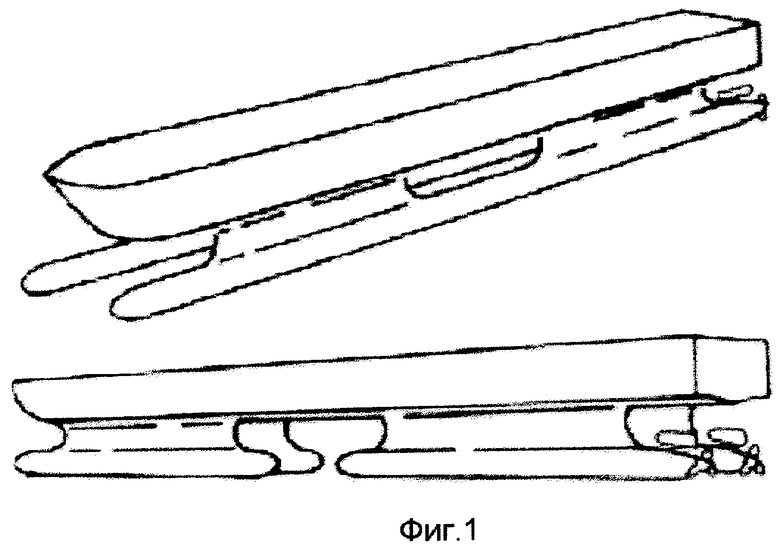
| Морское судно | 1973 |
|
SU893124A3 |
| US 6532884 В2, 18.03.2003 | |||
| US 6550408 B1, 22.04.2003. | |||

