Изобретение относится к оптическим системам наведения управляемых снарядов и может быть использовано в системах управляемого оружия с телеориентацией в луче лазера.
Известна система наведения управляемого снаряда, содержащая управляемый снаряд с формирователем признака снаряда, системой запуска и оптический прицел, включающий в себя канал визирования цели и канал наведения, содержащий источник лазерного излучения, модулятор, оптическую систему с переменным фокусным расстоянием и схему управления оптической системой, выход которой соединен с оптической системой с переменным фокусным расстоянием, при этом первый вход схемы управления оптической системой соединен с выходом формирователя признака снаряда, второй вход соединен с системой запуска снаряда, а выход - с оптической системой с переменным фокусным расстоянием (Патент РФ №2126522, МПК7 F 41 G 7/26).
Существенным недостатком данного оптического прицела является невозможность контроля энергетических параметров и размеров поля управления, формируемого прицелом, на конкретных дальностях при проверке его оптических параметров с помощью контрольно-проверочной аппаратуры.
Задачей предлагаемого изобретения является повышение качества контроля характеристик системы наведения при его эксплуатации за счет приостановки изменения размеров поля управления и параметров команд управления на заданной дальности работы прибора по внешним сигналам управления.
Поставленная цель достигается тем, что в систему наведения управляемого снаряда, содержащую систему запуска снаряда и оптический прицел, включающий в себя канал визирования цели и канал наведения, содержащий последовательно соединенные источник лазерного излучения, модулятор и оптическую систему с переменным фокусным расстоянием, вход которой соединен с выходом схемы управления оптической системой, дополнительно введена шина управления, а в оптический прицел введены элемент ИЛИ, элемент И, элемент НЕ, при этом первый вход шины управления соединен с входом элемента НЕ, выход которого соединен с первым входом элемента И, второй вход которого соединен с выходом элемента ИЛИ, первый вход которого соединен с выходом системы запуска снаряда, а второй вход - со вторым входом шины управления, а выход элемента И соединен со входом управления схемы управления оптической системой.
Введение элементов ИЛИ, И, НЕ и шины управления с соответствующими связями позволяет приостанавливать изменение размеров поля управления и параметров команд управления.
На фиг.1 приведена структурная схема оптического прицела системы наведения.
На фиг.2 приведены зависимости величины поля управления от времени работы системы наведения управляемого снаряда.
Система наведения управляемого снаряда состоит из управляемого снаряда 1, системы запуска снаряда 2, оптического прицела 3, включающего в себя канал визирования цели 4 и канал наведения 5, состоящий из источника лазерного излучения 6, модулятора 7, оптическую систему с переменным фокусным расстоянием 8, схему управления оптической системой 9, элемент И 10, элемент ИЛИ 11, элемент НЕ 12 и шину управления 13.
Работает система наведения следующим образом.
Система работает в двух режимах.
Первый режим - штатный режим работы в режиме наведения управляемого снаряда на цель. Второй режим - режим контроля параметров поля управления и энергетических запасов прицела.
В первом режиме работы на шину управления не подают никаких внешних сигналов управления.
Оператор наводит канал визирования 4 на выбранную цель, производится подача питания на оптический прицел и оператор производит выстрел управляемого снаряда 1. В этот момент времени от системы запуска снаряда 2 на первый вход элемента ИЛИ 11 поступает управляющий сигнал, который проходит далее на второй вход элемента И 10, и, т.к. на шину управления не подано никаких сигналов, этот сигнал с выхода элемента И 10 поступает на вход схемы управления оптической системой 9, которая разрешает работу оптической системы с переменным фокусным расстоянием 8. При этом в оптической системе с переменным фокусным расстоянием 8 под действием сигналов управления со схемы управления оптической системой 9 происходит линейное перемещение подвижных элементов оптической схемы, что позволяет изменять фокусное расстояние формирующего оптической системой в соответствии с законом изменения текущей полетной дальности снаряда. При этом размер поля управления на дальности снаряда остается неизменным, как приведено на фиг.2а. В тоже время размер поля управления, формируемый оптическим прицелом, на конкретной дальности (L) изменяется как показано на фиг.2б.
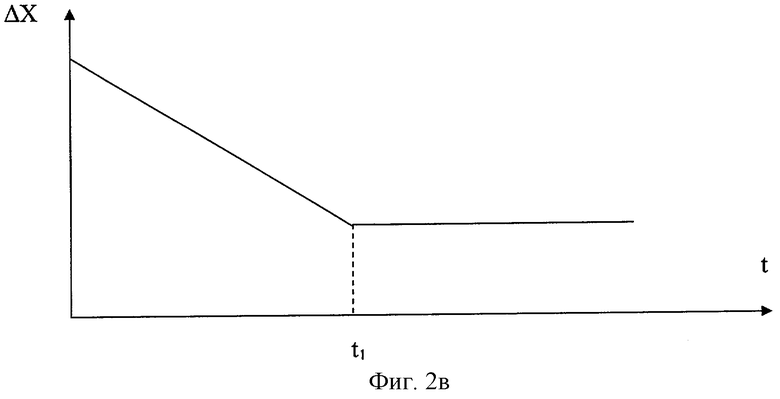
Во втором режиме работы, режим измерения параметров поля управления, производится подача питания на оптический прицел 3, а на первый вход шины управления 13 (вход технологического пуска прибора) подается сигнал разрешения, который поступает на второй вход элемента ИЛИ 11 и далее на второй вход элемента И 10, т.к. на второй вход шины управления (вход блокировки схемы управления оптической системой) не подан сигнал, то на выходе элемента НЕ 12 присутствует сигнал лог.1, который, поступая на первый вход элемента И 10, разрешает прохождение сигнала через элемент И 10 по второму входу на вход схемы управления оптической системой 9, которая разрешает работу оптической системы с переменным фокусным расстоянием 8. При этом в оптической системе с переменным фокусным расстоянием 8 под действием сигналов управления со схемы управления оптической системой 9 происходит линейное перемещение подвижных элементов оптической схемы, что позволяет изменять фокусное расстояние формирующего оптической системой в соответствии с законом изменения текущей полетной дальности снаряда. В тоже время размер поля управления до времени t1 (фиг.2в), формируемый оптическим прицелом, на конкретной дальности (L) изменяется как показано на фиг.2в.
В момент времени t1 на второй вход шины управления 13 (вход блокировки схемы управления оптической системой) подается сигнал, который поступает на элемент НЕ, и сигнал лог.0 с выхода элемента НЕ 12, поступая на первый вход элемента И 10, запрещает прохождение сигнала по второму ее входу. Далее запрещающий сигнал поступает на вход схемы управления оптической системой 9, которая запрещает дальнейшее перемещение подвижных элементов оптической системы и размер поля управления на дальности L все остальное время остается неизменным, фиг.2в. С помощью внешних контрольно-измерительных приборов (фотоприемное устройство, элементы перемещения и т.п.) производится измерение размеров поля управления и энергетических запасов статического поля на конкретной дальности.
Т.о. в системе наведения управляемым снарядом обеспечивается формирование статического поля управления на любой дальности, что позволяет производить контроль параметров поля управления с помощью контрольно-проверочной аппаратуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТРЕЛЬБЫ СНАРЯДОМ, УПРАВЛЯЕМЫМ ПО ЛУЧУ ЛАЗЕРА, И ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ СНАРЯДА | 2015 |
|
RU2582308C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ И СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205347C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2212619C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2183808C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2126946C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2126522C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ И СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2219483C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2004 |
|
RU2280224C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО РЕАКТИВНОГО СНАРЯДА | 2019 |
|
RU2746340C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ УПРАВЛЕНИЯ ОГНЕМ (ВАРИАНТЫ) | 2002 |
|
RU2224206C1 |
Изобретение относится к оптическим системам наведения управляемых снарядов и может быть использовано в системах управляемого оружия с телеориентацией в луче лазера. Технический результат - повышение качества контроля характеристик системы наведения при его эксплуатации. В систему наведения управляемого снаряда, содержащую систему запуска снаряда и оптический прицел, включающий в себя канал визирования цели и канал наведения, содержащий последовательно соединенные источник лазерного излучения, модулятор и оптическую систему с переменным фокусным расстоянием, вход которой соединен с выходом схемы управления оптической системой, дополнительно введена шина управления, а в оптический прицел введены элемент ИЛИ, элемент И, элемент НЕ. При этом первый вход шины управления соединен с входом элемента НЕ, выход которого соединен с первым входом элемента И, второй вход которого соединен с выходом элемента ИЛИ, первый вход которого соединен с выходом системы запуска снаряда, а второй вход - со вторым входом шины управления, а выход элемента И соединен со входом управления схемы управления оптической системой. 2 ил.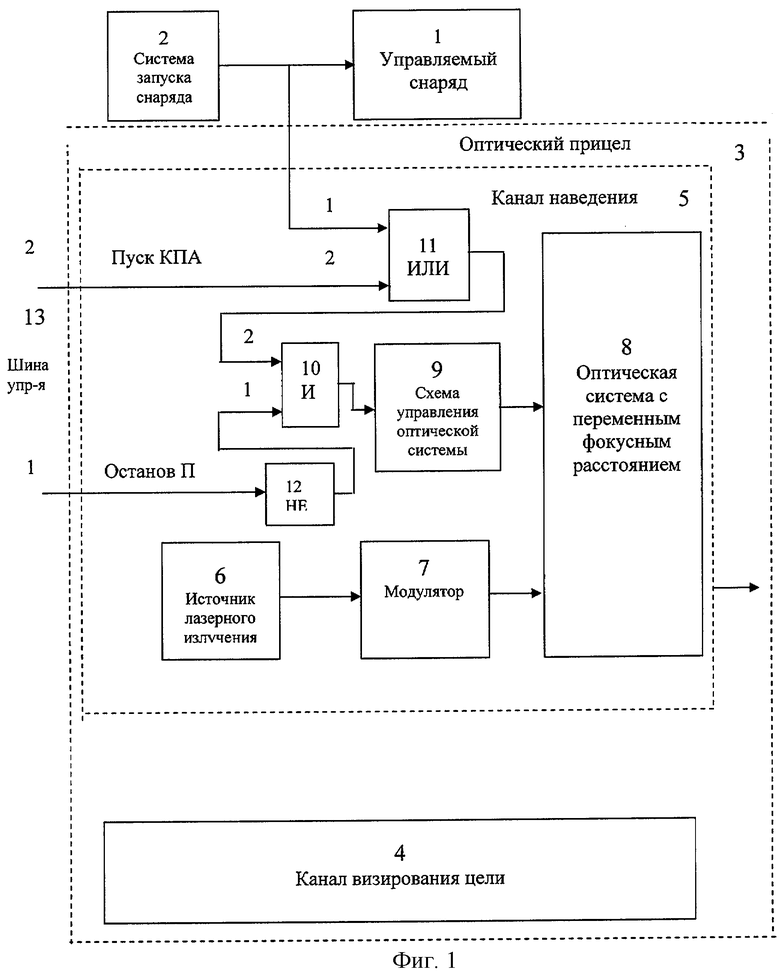
Система наведения управляемого снаряда, содержащая систему запуска снаряда и оптический прицел, включающий в себя канал визирования цели и канал наведения, содержащий последовательно соединенные источник лазерного излучения, модулятор и оптическую систему с переменным фокусным расстоянием, вход которой соединен с выходом схемы управления оптической системой, отличающаяся тем, что в нее дополнительно введена шина управления, а в оптический прицел введены элемент ИЛИ, элемент И, элемент НЕ, при этом первый вход шины управления соединен с входом элемента НЕ, выход которого соединен с первым входом элемента И, второй вход которого соединен с выходом элемента ИЛИ, первый вход которого соединен с выходом системы запуска снаряда, а второй вход - со вторым входом шины управления, а выход элемента И соединен со входом управления схемы управления оптической системой.
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2126522C1 |
| DE 4137843 A1, 19.05.1993 | |||
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ | 1994 |
|
RU2107879C1 |
| US 5350134 А, 27.09.1994 | |||
| СПОСОБ ОБРАБОТКИ ПРИЗАБОЙНОЙ ЗОНЫ СКВАЖИНЫ | 1998 |
|
RU2135761C1 |

