Изобретение относится к оптическим системам наведения управляемых снарядов и может быть использовано в системах управляемого оружия с телеориентацией в луче лазера.
Известен оптический прицел системы наведения управляемого снаряда, выбранный в качестве прототипа, патент РФ №2150073, МПК 7 F 41 G 7/26, содержащий установленные соосно визир и прожектор, включающий в себя два инжекционных лазера, излучающие области которых расположены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, последовательно установленные на этой оси оптический сканер в виде вращающейся призмы и панкратический объектив, при этом ось вращения призмы совмещена с оптической осью объектива, а также шторку, установленную на оправу вращающейся призмы, выполненную в виде непрозрачного сектора с углом разворота 180°, стороны которого проходят через ось вращения призмы и развернуты относительно плоскости наклона граней призмы на угол α в направлении вращения сканера, а радиус сектора обеспечивает перекрытие осей двух оптронных датчиков, установленных неподвижно параллельно одной из измеряемых координат, причем в плоскости, перпендикулярной оптической оси прожектора, угол между линиями, соединяющими каждый из датчиков с осью вращения призмы, составляет 90°, при этом выходы первого и второго оптронных датчиков подключены соответственно к входам первой и второй схем задержки, выходы которых подключены соответственно к первому и второму входам схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, а также соответственно к первому и второму входу ПЗУ, выход схемы ИСКЛЮЧАЮЩЕЕ ИЛИ подключен к первым входам счетчика времени и коммутатора каналов, выход счетчика времени подключен к третьему входу ПЗУ, выход которого подключен к входу преобразователя код-время, выход которого подключен к второму входу коммутатора каналов, при этом вторые входы счетчика времени и преобразователя код-время подключены к выходу опорного генератора, а первый и второй выходы коммутатора каналов подключены соответственно к входам первого и второго лазеров.
Используемый в данном прицеле панкратический объектив обеспечивает постоянный размер поля управления в диапазоне перепада кратностей объектива (постоянный коэффициент передачи в луче наведения). Однако при этом для дальнейшего увеличения дальности наведения требуется увеличивать кратность объектива, что приводит к увеличению габаритно-массовых характеристик прицела и усложнению механизма привода элементов объектива.
Задачей предлагаемого изобретения является повышение дальности наведения управляемого снаряда.
Данная цель может быть решена при ограниченной кратности объектива за счет того, что при достижении его максимального фокусного расстояния (предел кратности) наведение будет продолжаться в геометрически расходящемся луче наведения, а коэффициент передачи луча наведения (крутизна его пеленгационной характеристики) будет меняться путем временной коррекции коэффициента команд, начиная с момента достижения объективом максимального фокусного расстояния по формуле:
К=К0(Dмах.об/Dп),
где К0 - номинальный коэффициент крутизны команд, Dмах.об - программная дальность, соответствующая максимальному фокусному расстоянию панкратического объектива, Dn - полетная дальность объекта управления.
Поставленная цель достигается тем, что в оптический прицел системы наведения управляемого снаряда, содержащий установленные соосно визир и прожектор, включающий в себя два инжекционных лазера, излучающие области которых расположены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, последовательно установленные на этой оси оптический сканер в виде вращающейся призмы и панкратический объектив, при этом ось вращения призмы совмещена с оптической осью объектива, а также непрозрачную шторку, установленную на оправу вращающейся призмы, два оптронных датчика установленных неподвижно параллельно одной из измеряемых координат, причем в плоскости, перпендикулярной оптической оси прожектора, угол между линиями, соединяющими каждый из датчиков с осью вращения призмы, составляет 90°, при этом выходы первого и второго оптронных датчиков подключены соответственно к входам первой и второй схем задержки, выходы которых подключены соответственно к первому и второму входам схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, а также к первому и второму входам постоянного запоминающего устройства (ПЗУ), выход схемы ИСКЛЮЧАЮЩЕЕ ИЛИ подключен к первым входам счетчика времени и коммутатора каналов, выход счетчика времени подключен к третьему входу ПЗУ, выход которого подключен к первому входу преобразователя код-время, второй вход которого соединен с выходом опорного генератора и вторым входом счетчика времени, а выход преобразователя код-время подключен к второму входу коммутатора каналов, выходы которого подключены соответственно к входам первого и второго лазеров, введены первый и второй счетчики импульсов, первые - тактовые входы которых соединены с выходом опорного генератора, выход переноса первого счетчика импульсов соединен с входом разрешения второго счетчика импульсов, информационные выходы которого подключены к четвертому входу постоянного запоминающего устройства.
Введение первого и второго счетчиков импульсов с соответствующими связями позволяет изменять коэффициент команд, передаваемый на объект, в зависимости от времени наведения управляемого снаряда после достижения программной дальности объекта.
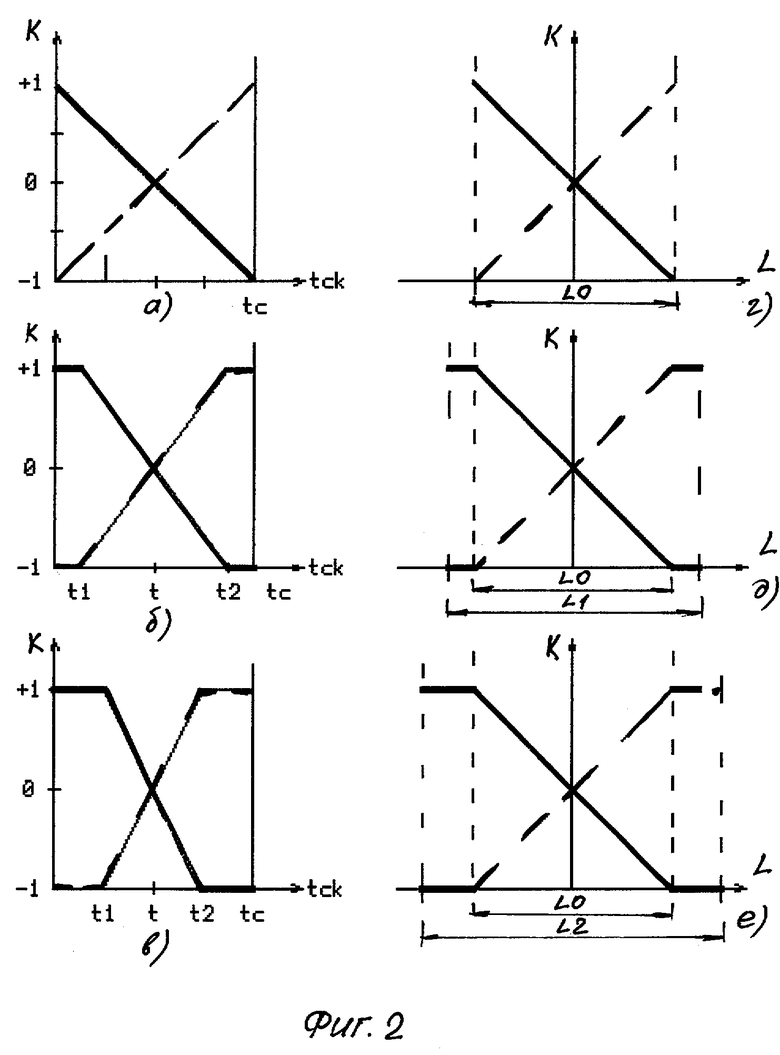
На фиг.1 приведена структурная схема оптического прицела системы наведения.
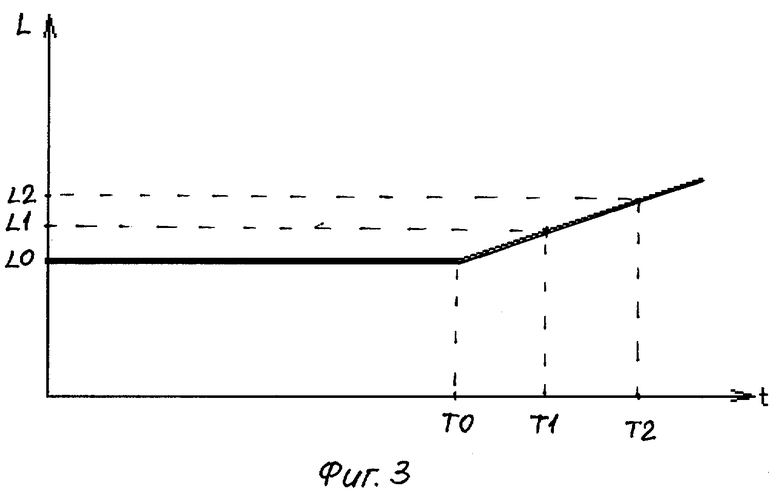
На фиг.2 приведены пеленгационные характеристики прицела в различные моменты времени наведения и в зависимости от расположения луча относительно линии визирования.
На фиг.3 приведено изменение размера поля наведения в зависимости от времени наведения.
Оптический прицел системы наведения содержит визир 1, прожектор 2, включающий в себя два инжекционных лазера 3 и 4, систему вывода излучения лазеров на единую оптическую ось 5, оптический сканер 6, призму 7, панкратический объектив 8, непрозрачную шторку 9, два оптронных датчика 10 и 11, первую и вторую схемы задержек 12 и 13, схему ИСКЛЮЧАЮЩЕЕ ИЛИ 14, постоянное запоминающее устройство (ПЗУ) 15, счетчик времени 16, коммутатор каналов 17, преобразователь код-время 18, опорный генератор 19, первый 20 и второй 21 счетчики импульсов. Цифровые схемы (ПЗУ, счетчики, коммутаторы и логические элементы) могут быть выполнены, например, на основе однокристальной микроЭВМ типа АТ 89 С 52 или на жесткой логике, например на базе ПЛИС.
Работает прицел следующим образом.
Вращающаяся призма 7 совершает нутационное сканирование плоскими лучами лазеров 3 и 4 по формируемому полю, радиус которого на дальности управляемого объекта поддерживается постоянным за счет изменения фокусного расстояния панкратического объектива 8. При этом в ходе вращения призмы шторка 9 производит последовательное прерывание в оптронных датчиках 10 и 11, комбинация сигналов на выходах которых определяет направление сканирования каждого плоского луча по формируемому полю. Данные сигналы поступают после прохождения схем задержек 12 и 13 соответственно на первые и вторые входы ПЗУ 15 (эти входы определяют направление сканирования) и схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 14, на выходе которой формируется сигнал, определяющий работу канала курс (включен первый лазер 4 - сигнал лог.1) или канала тангаж (включен второй лазер 3 - сигнал лог.0). Импульсы с выхода опорного генератора поступают на первые, тактовые, входы первого 20 и второго 21 счетчиков импульсов. И первый счетчик импульсов 20 отсчитывает текущее время наведения объекта, и так как на его выходе переноса присутствует сигнал лог.0, запрещающий работу второго счетчика импульсов 21, на информационных выходах второго счетчика импульсов 21 присутствует нулевой код, который поступает на четвертые адресные входы постоянного запоминающего устройства (определяет страницу ПЗУ).
От момента каждой смены состояния сигнала на выходе схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 14 счетчик времени 16 синхронно с частотой опорного генератора 19 формирует на своем выходе код, пропорциональный текущему времени относительно смены сигнала на выходе схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 14. В зависимости от состояния адресных входов ПЗУ 15 (текущее время сканирования, страница ПЗУ и канал управления) формирует на своем выходе код, в соответствии с которым преобразователь код - время 18 формирует парные импульсы, причем временной интервал между импульсами в паре соответствует текущему каналу сканирования, а частота повторения посылок линейно меняется во времени. При этом зависимость периода повторения посылок (определяет величину и направление команды управления) от времени приведена на фиг.2а.
Т.е. при смене информации на выходе одного из датчиков 10 или 11 сигналы с их выходов, пройдя через линии задержек 12 и 13, поступают на первый и второй входы ПЗУ 15 и определяют направление сканирования полоски, например, на выходе датчиков сигналы 00, что соответствует каналу тангажа и направлению сканирования снизу вверх, кроме того, сигналы с выхода линий задержек 12 и 13 поступают на входы ИСКЛЮЧАЮЩЕЕ ИЛИ 14 и на выходе ее формируется сигнал лог.1, т.к. на ее входах сигналы 00 (смена канала управления). Фронт этого сигнала, поступая на первый вход счетчика времени 16, обнуляет его, что соответствует нулевому времени на фиг.2а, и ПЗУ 15 на своем выходе формирует код, величина которого пропорциональна максимальной команде, поступающей на управляемый снаряд, который поступает на первый вход преобразователя код - время 18, где этот код преобразуется в парные импульсы, причем расстояние между импульсами в паре определяется каналом управления (включен первый или второй лазер), в нашем случае при комбинации на первом и втором входах ПЗУ 00-первый канал тангажа, а период повторения пар соответствует величине команды, передаваемой на управляемый снаряд. Эти импульсы поступают на второй вход коммутатора канала 17 и под действием сигнала лог.1 с выхода ИСКЛЮЧАЮЩЕГО ИЛИ 14 эти импульсы поступают на первый лазер 3, где они преобразуются в световой сигнал, который, пройдя через систему вывода излучения лазеров на единую оптическую ось 5, призму 7 и панкратический объектив 8, поступает на выход прицела и далее поступает на управляемый снаряд.
С изменением времени сканирования от t1 до tc ПЗУ 15 на своем выходе формирует коды, линейно изменяющиеся во времени, как показано на фиг.2а, и период повторения парных импульсов, поступающих на первый лазер 3, также линейно изменяется.
В момент времени tc происходит смена информации на выходе первого датчика 10 и сигнал лог.1 с его выхода, пройдя через линию задержки 12, поступает на первый вход ПЗУ 15. Т.о., на первом и втором входах ПЗУ 15 присутствуют сигналы 10 соответственно, что соответствует каналу курса и направлению сканирования слева направо, кроме того, сигналы с выхода линий задержек 12 и 13 поступают на входы ИСКЛЮЧАЮЩЕЕ ИЛИ 14, и на выходе ее формируется сигнал лог.0, т.к. на ее входах сигналы 10 (смена канала управления). Спад этого сигнала, поступая на первый вход счетчика времени 16, обнуляет его, что соответствует нулевому времени на фиг.2а, аналогичным образом происходит формирование команд по тангажу. Величина команды в зависимости от положения луча в пространстве приведена на фиг.2г, при этом линейная зона наведения совпадает с физическим размером зоны наведения (L=L0).
По достижению программной дальности (остановка панкратики) на выходе переноса первого счетчика импульсов 20 вырабатывается сигнал, который поступает на вход разрешения второго счетчика импульсов 21 и разрешает его работу.
Начиная с этого времени, снаряд летит в расширяющемся оптическом луче фиг.3.
С этого момента времени на четвертый адресный вход ПЗУ поступает код с выхода второго счетчика времени, пропорциональный времени полета снаряда в расширяющемся луче, определяющий страницу ПЗУ, и в зависимости от состояния адресных входов ПЗУ (текущее время сканирования, канал управления и номер страницы - время полета в расширяющемся луче) формирует на своем выходе код, по которому формируется величина команды управления. На фиг.2б и фиг.2д приведены зависимости команды управления в момент времени Т1 (фиг.3), а на фиг.2в и фиг.2е - в момент времени Т2 (фиг.3). При этом размер поля наведения в момент времени Т1 равен L1, а в момент времени Т2-L2, т.к. снаряд летит в расширяющемся оптическом луче. Но при этом линейная зона наведения остается неизменной и равной L0, и снаряд не "чувствует" изменение в размерах поля наведения.
Т.о., за счет изменения коэффициента команды (наклона пеленгационной характеристики) обеспечивается увеличение дальности действия прицела.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ, ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2006 |
|
RU2313055C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2003 |
|
RU2260764C2 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И ОПТИЧЕСКИЙ ПРИЦЕЛ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2228505C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2234661C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2150073C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2003 |
|
RU2260763C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2004 |
|
RU2257524C1 |
| Оптический прицел системы наведения управляемого снаряда (варианты) | 2016 |
|
RU2623687C1 |
| Устройство формирования оптического поля для телеориентирования управляемых объектов | 2019 |
|
RU2704675C1 |
| Оптический прицел системы наведения управляемого объекта (варианты) | 2023 |
|
RU2825201C1 |
Изобретение относится к оптическим системам наведения управляемых снарядов и может быть использовано в системах управляемого оружия с телеориентацией в луче лазера. Технический результат - повышение дальности наведения управляемого снаряда. Согласно изобретению оптический прицел системы наведения управляемого снаряда содержит установленные соосно визир и прожектор, включающий в себя два инжекционных лазера, излучающие области которых расположены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, последовательно установленные на этой оси оптический сканер в виде вращающейся призмы и панкратический объектив. При этом ось вращения призмы совмещена с оптической осью объектива. Прицел также содержит непрозрачную шторку, установленную на оправу вращающейся призмы, два оптронных датчика, установленных неподвижно параллельно одной из измеряемых координат, причем в плоскости, перпендикулярной оптической оси прожектора, угол между линиями, соединяющими каждый из датчиков с осью вращения призмы, составляет 90°. При этом выходы первого и второго оптронных датчиков подключены соответственно к входам первой и второй схем задержки, выходы которых подключены соответственно к первому и второму входам схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, а также к первому и второму входам постоянного запоминающего устройства (ПЗУ), выход схемы ИСКЛЮЧАЮЩЕЕ ИЛИ подключен к первым входам счетчика времени коммутатора каналов. Выход счетчика времени подключен к третьему входу ПЗУ, выход которого подключен к первому входу преобразователя код-время, второй вход которого соединен с выходом опорного генератора и вторым входом счетчика времени. Выход преобразователя код-время подключен к второму входу коммутатора каналов, выходы которого подключены соответственно к входам первого и второго лазеров. В оптический прицел введены первый и второй счетчики импульсов, первые - тактовые входы которых соединены с выходом опорного генератора, выход переноса первого счетчика импульсов соединен с входом разрешения второго счетчика импульсов, информационные выходы которого подключены к четвертому входу постоянного запоминающего устройства. 3 ил.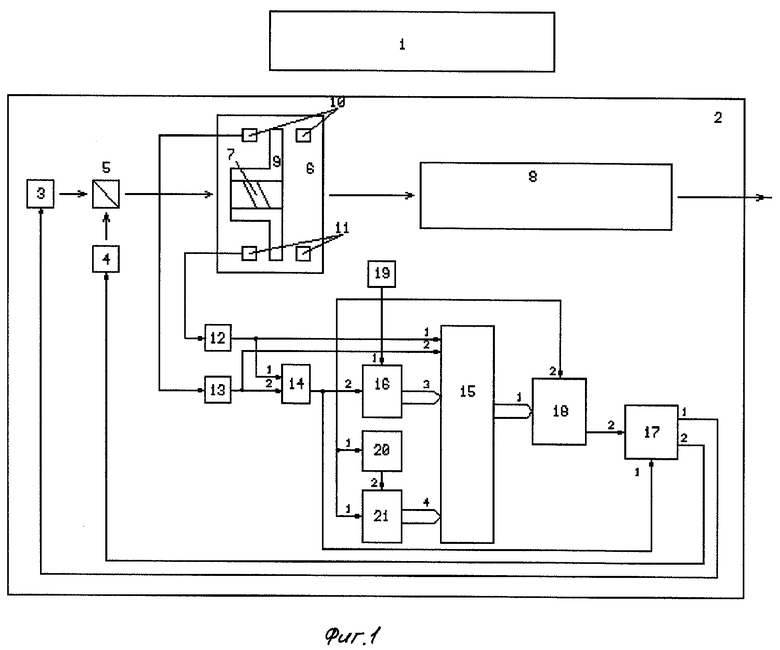
Оптический прицел системы наведения управляемого снаряда, содержащий установленные соосно визир и прожектор, включающий в себя два инжекционных лазера, излучающие области которых расположены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, последовательно установленные на этой оси оптический сканер в виде вращающейся призмы и панкратический объектив, при этом ось вращения призмы совмещена с оптической осью объектива, а также непрозрачную шторку, установленную на оправу вращающейся призмы, два оптронных датчика, установленных неподвижно параллельно одной из измеряемых координат, причем в плоскости, перпендикулярной оптической оси прожектора, угол между линиями, соединяющими каждый из датчиков с осью вращения призмы, составляет 90°, при этом выходы первого и второго оптронных датчиков подключены соответственно к входам первой и второй схем задержки, выходы которых подключены соответственно к первому и второму входам схемы исключающее ИЛИ, а также к первому и второму входам постоянного запоминающего устройства (ПЗУ), выход схемы исключающее ИЛИ подключен к первым входам счетчика времени и коммутатора каналов, выход счетчика времени подключен к третьему входу ПЗУ, выход которого подключен к первому входу преобразователя код-время, второй вход которого соединен с выходом опорного генератора и вторым входом счетчика времени, а выход преобразователя код-время подключен ко второму входу коммутатора каналов, выходы которого подключены соответственно к входам первого и второго лазеров, отличающийся тем, что в него введены первый и второй счетчики импульсов, первые - тактовые входы которых соединены с выходом опорного генератора, выход переноса первого счетчика импульсов соединен с входом разрешения второго счетчика импульсов, информационные выходы которого подключены к четвертому входу постоянного запоминающего устройства.
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2150073C1 |
| US 4111385 A, 05.09.1978 | |||
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2100745C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА МОДУЛЯЦИИ ИЗЛУЧЕНИЯ ОРТОГОНАЛЬНЫХ СКАНИРУЮЩИХ ЛУЧЕЙ В СИСТЕМАХ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2109246C1 |
| СПОСОБ ОБРАБОТКИ ПРИЗАБОЙНОЙ ЗОНЫ СКВАЖИНЫ | 1998 |
|
RU2135761C1 |
| US 4330099 А, 18.05.1982. | |||

