Заявляемый способ и система относятся к измерительной технике и позволяют повысить точность измерений и чувствительность фотоэлектронной системы, работающей в инфракрасном диапазоне длин волн, при определении скорости объектов в заданной точке траектории их движении.
Наиболее близким аналогом к заявляемому способу является способ измерения скорости объектов фотоэлектронной системой Нижегородского научно-исследовательского приборостроительного института [1], в состав которой входит фотоэлектронный блок (ФЭБ), содержащий два фотоприемных устройства (ФПУ). ФПУ, входящие в ФЭБ, расположены на определенном расстоянии друг от друга, называемом базой и определяемом конструкцией блока. В прототипе размеры диаграмм направленности в каждом ФПУ формируются фокусным расстоянием выпуклой сферической линзы и линейными размерами фоточувствительной поверхности фотодиода. Промышленностью выпускаются фотодиоды с малыми площадями фоточувствительной поверхности. Их использование приводит к низкой чувствительности ФПУ из-за малых размеров фоточувствительной поверхности фотодиода, что в свою очередь приводит к ухудшению точности измерений скорости объектов при малых освещенностях. Для увеличения площади фоточувствительной поверхности можно использовать несколько однотипных фотодиодов, но при использовании сферической линзы возникают зоны разрывности, в которых невозможно измерение скорости объекта. Другим недостатком прототипа является малое фокусное расстояние используемой сферической линзы, что приводит к ограничению точности калибровки диаграмм направленности ФПУ и, следовательно, к ограничению точности измерений скорости объектов фотоэлектронной системой. Применение сферической линзы с большими размерами и с большим фокусным расстоянием по сравнению с линзой в прототипе не дает выигрыша в чувствительности и точности измерений, если используют только один фотодиод, так как уменьшается площадь диаграммы направленности в проекции, перпендикулярной траектории движения объектов, т.е. площадь зоны блокировки.
Заявляемый способ позволяет повысить точность измерений скорости объектов фотоэлекронной системой, а также повысить чувствительность ФПУ и увеличить площадь зоны блокировки.
Это достигается тем, что в заявляемом способе, включающем использование фотоэлектронной системы на основе электронно-вычислительной машины (ЭВМ), ФЭБ, с двумя ФПУ, оптический блок каждого из которых содержит фотодиод и линзу, применяют в каждом ФПУ несколько однотипных фотодиодов и цилиндрическую линзу, с торцов которой устанавливают щитки, в ФЭБ используют измерительный модуль скорости, при появлении объекта над фотоэлектронной системой с помощью компаратора производят запуск процесса измерения скорости объекта, с фотоэлектронного блока передают в цифровом виде результаты измерений скорости объекта на ЭВМ, причем выбирают фокусное расстояние цилиндрической линзы больше, чем 40 мм, а величину апертуры линзы выбирают в зависимости от числа применяемых однотипных фотодиодов.
Наиболее близким аналогом к заявляемой фотоэлектронной системе является фотоэлектронная система Нижегородского научно-исследовательского приборостроительного института [1]. Недостатками прототипа являются низкие точность измерений фотоэлектронной системы и чувствительность, необходимость большой базы для обеспечения точности измерений, большие габариты и вес ФЭБ, низкая надежность и помехозащищенность фотоэлектронной системы из-за использования датчика вспышки для запуска начала измерений, протяженности каналов измерений. Сложность процесса регулировки при калибровке диаграмм направленности ФПУ в полевых условиях приводит к дополнительным погрешностям при измерениях. Заявляемое изобретение устраняет вышеуказанные недостатки прототипа и позволяет улучшить тактико-технические характеристики ФЭБ и фотоэлектронной системы, а именно, повысить точность измерения скорости объектов, уменьшить размеры и вес ФЭБ, увеличить площадь зоны блокировки, уменьшить трудоемкость при развертывании системы в полевых условиях.
Это достигается тем, что в фотоэлектронной системе измерения скорости объектов, содержащей ЭВМ, ФЭБ с двумя ФПУ, оптический блок каждого из которых содержит фотодиод и линзу, оптические блоки ФПУ выполнены с возможностью юстировки на калибровочном стенде, а каждый оптический блок ФПУ включает несколько однотипных фотодиодов, линза выполнена цилиндрической, причем фокусное расстояние ее больше, чем 40 мм, а величина апертуры цилиндрической линзы зависит от числа применяемых фотодиодов, с торцов линзы имеются два щитка, причем щитки выполнены с возможностью выдвижения из держателей и применения их в качестве ориентира для установки фотоэлектронной системы вдоль направления параллельного траекториям движения объектов, ФЭБ включает измерительный модуль скорости, содержащий два аналого-цифровых преобразователя (АЦП), компаратор, тактовый генератор, два оперативно запоминающих устройства (ОЗУ), счетчик, микроконтроллер, сигналы с выходов ФПУ поступают на АЦП, причем сигнал с выхода одного АЦП поступает на первое ОЗУ, затем на микроконтроллер, с выхода которого сигнал поступает на ЭВМ, сигнал с выхода другого АЦП поступает на второе ОЗУ и на компаратор, который своим выходом запускает работу счетчика, с выхода второго ОЗУ сигнал также поступает на микроконтроллер, осуществляющий обработку цифрового кода сигналов двух ОЗУ и вычисляющий скорость летящего объекта, один выход микроконтроллера соединен по каналу связи RS-232 с ЭВМ для отображения результатов измерений, а второй выход управляет работой счетчика, на вход которого поступает сигнал с выхода тактового генератора, определяющего частоту дискретизации, сигналы с выхода счетчика поступают на входы двух ОЗУ и двух АЦП.
На фиг.1 показана конструкция ФЭБ, где обозначено:
1 - ФЭБ в корпусе;
2, 3 - входные окна оптических блоков ФПУ 1, ФПУ 2;
4, 5 - ФПУ 1, ФПУ 2 соответственно;
6 - направление, параллельное траекториям движения объектов;
7 - направление, перпендикулярное траекториям движения объектов;
8, 9, 10, 11 - держатели щитков;
12, 13, 14, 15 - щитки;
16 - разъем подключения.
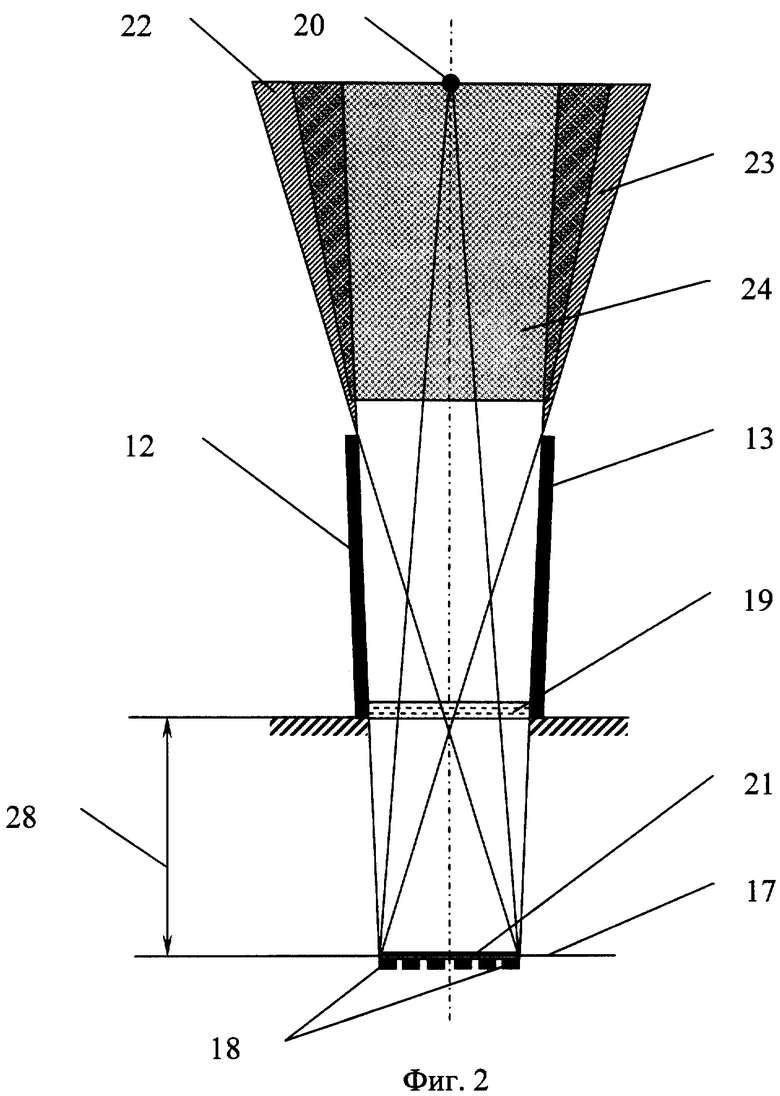
На фиг.2 показана оптическая схема цилиндрической линзы ФПУ с несколькими фотодиодами в плоскости изображения, где обозначено:
17 - плоскость изображения цилиндрической линзы;
18 - N фотодиодов цилиндрической линзы;
19 - линза цилиндрическая;
20 - точечный объект;
21 - линия изображения объекта;
22, 23 - области со спадающей чувствительностью;
12, 13 - щитки;
24 - диаграмма направленности ФПУ в плоскости, перпендикулярной траектории движения объектов (зона блокировки).
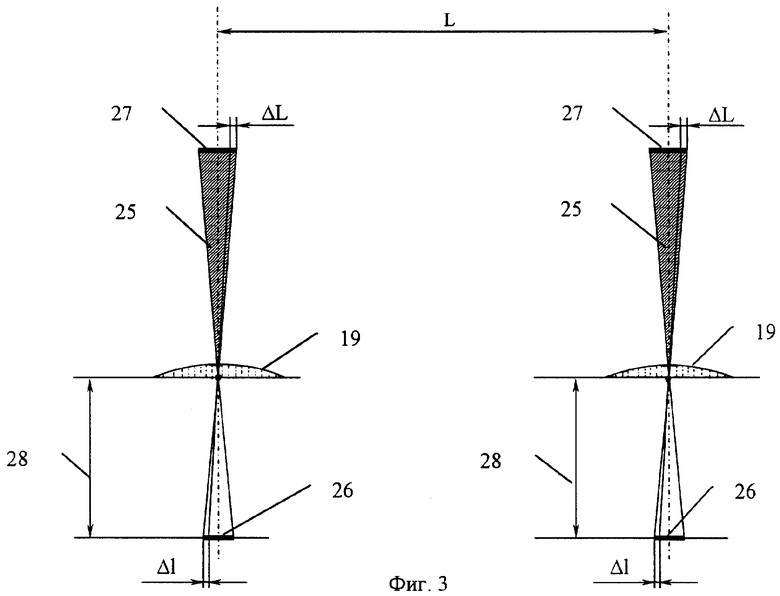
На фиг.3 показана ширина диаграмм направленности двух ФПУ с базовым расстоянием между ними, равным L, где обозначено:
19 - линза цилиндрическая;
25 - диаграмма направленности ФПУ в плоскости, параллельной траектории движения объектов;
26 - поперечный размер фотодиода с погрешностью из-за не прямолинейности боковой продольной стороны фоточувствительной поверхности фотодиода Δl;
27 - ширина диаграммы направленности ФПУ с погрешностью измерения ΔL;
28 - фокусное расстояние цилиндрической линзы.
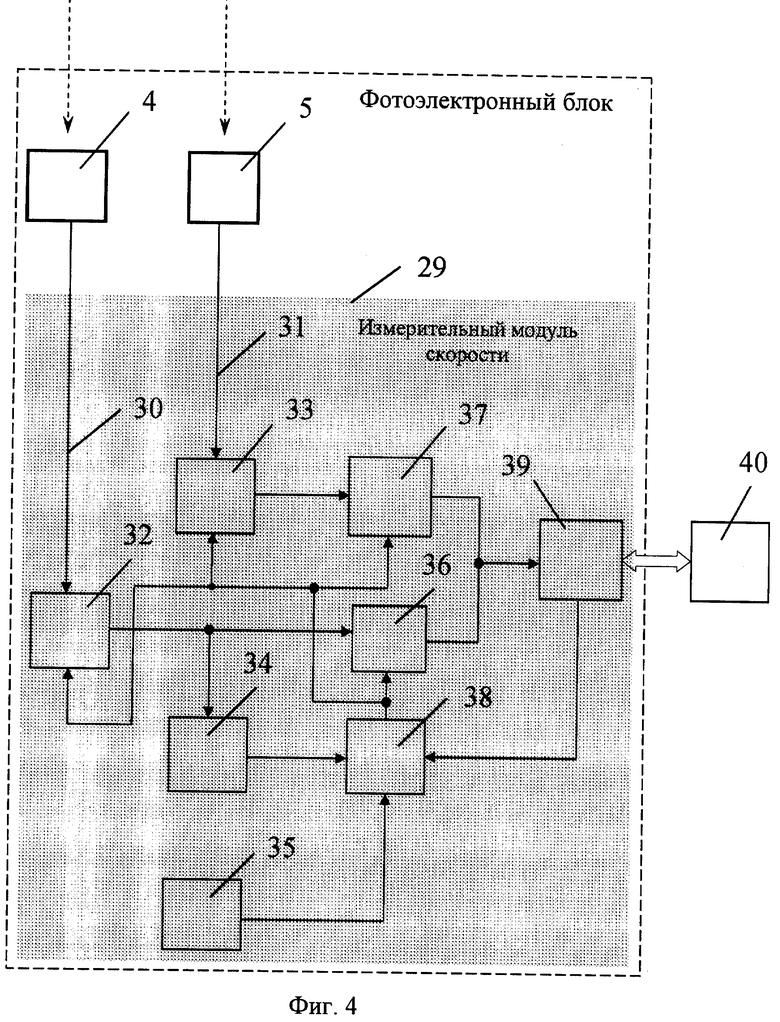
На фиг.4 показана структурная схема фотоэлектронной системы (стрелками с пунктиром показано направление оптического сигнала), где обозначено:
4, 5 - ФПУ 1, ФПУ 2;
29 - измерительный модуль скорости;
30, 31 - выходы ФПУ 1, ФПУ 2;
32, 33 - АЦП 1, АЦП 2;
34 - компаратор;
35 - тактовый генератор;
36, 37 - ОЗУ 1, ОЗУ 2;
38 - счетчик;
39 - микроконтроллер;
40 - ЭВМ.
Заявляемый способ осуществляют следующим образом. Для увеличения фоточувствительной поверхности системы в плоскости изображения цилиндрической линзы 17 устанавливают плотно друг к другу несколько (N) однотипных фотодиодов 18 вдоль направления наибольшей стороны фотодиода. Суммарная площадь фоточувствительной поверхности фотодиодов возрастает в N раз, а чувствительность ФПУ растет в N. Выигрыш в чувствительности позволяет производить измерения фотоэлектронной системой в условиях меньшей освещенности на местности. Однако использование в оптических блоках ФПУ сферических линз исключается, т.к. приводит к возникновению зон разрывности в местах примыкания фотодиодов друг к другу. Объекты, попадая в такие зоны, не дают оптического сигнала и измерение скорости в этих зонах невозможно.
Поэтому для устранения зон разрывности вместо сферической линзы в каждом ФПУ применяют цилиндрическую линзу 19, с помощью которой точечный объект 20 в плоскости изображения цилиндрической линзы 17 отображается в виде линии 21. Зона разрывности отсутствует. С торцов цилиндрической линзы 19 устанавливают щитки 12, 13, 14, 15 для уменьшения областей со спадающей чувствительностью 22, 23, возникающих при применении цилиндрической линзы. Щитки 12, 13, 14, 15 позволяют установить фотоэлектронную систему по направлению, параллельному траектории движения объектов 6. Зона блокировки, образованная с помощью цилиндрической линзы 24 и при применении нескольких однотипных фотодиодов, имеет большую площадь, чем при применении одного фотодиода. Она задается выбором апертуры цилиндрической линзы при фиксированном числе применяемых однотипных фотодиодов, и чем больше число однотипных фотодиодов, тем больше должна быть апертура цилиндрической линзы 19 и, следовательно, будет больше площадь зоны блокировки.
Профиль наибольшей стороны фоточувствительной поверхности фотодиода непрямолинеен, имеет ломаный характер технологического происхождения. Отклонение Δl от прямой профиля приводит к тому, что при калибровке на стенде при измерении ширины диаграммы направленности ФПУ 27 возникает погрешность ΔL, которая оказывает наибольшее влияние на точность измерения скорости объектов. Эта погрешность тем меньше, чем больше фокусное расстояние 28 цилиндрической линзы 19.
В случае с цилиндрической линзой, для того чтобы уменьшить относительную погрешность измерения размера базы ΔL/L как составляющую погрешности измерения скорости объектов, можно увеличить фокусное расстояние линзы, не сужая зону блокировки, выбрав линзу с фокусным расстоянием более 40 мм. Применяя сферическую линзу, как в прототипе, это сделать нельзя, так как увеличение фокусного расстояния сферической линзы приведет к сужению зоны блокировки, поскольку размер наибольшей стороны фоточувствительной поверхности в этом случае ограничен размером только одного фотодиода и он мал.
Увеличение фокусного расстояния цилиндрической линзы приводит к уменьшению погрешности калибровки диаграмм направленности ФПУ. Это позволяет точно устанавливать на стенде положение диаграмм направленности ФПУ в двух взаимно перпендикулярных плоскостях, перпендикулярно и параллельно движению объектов, и тем самым уменьшать относительную погрешность размера базы ΔL/L (где L - размер базы), которая является составляющей погрешности измерения скорости объектов.
Предлагаемый способ позволяет при уменьшении отношения ΔL/L за счет увеличения фокусного расстояния и апертуры линзы уменьшить размер базы L, улучшить массогабаритные характеристики ФЭБ, увеличить точность измерений скорости объектов, применяя в каждом ФПУ несколько однотипных фотодиодов в сочетании с цилиндрической линзой.
Используя измерительный модуль скорости 29, расположенный в ФЭБ рядом с выходами ФПУ 30, 31, уменьшают влияние протяженности каналов измерения на точность измерения скорости объектов.
При появлении движущегося объекта над фотоэлектронной системой запускают с помощью компаратора 34 процесс измерения скорости летящего объекта, результаты измерений скорости объекта передают в цифровом виде на ЭВМ 40.
Фотоэлектронная система содержит ФЭБ 1, в корпусе которого установлены на одном общем основании два ФПУ 4, 5 и измерительный модуль скорости 29. Каждое ФПУ имеет оптический блок, в который входят несколько однотипных фотодиодов 18 и цилиндрическая линза 19. Оптические блоки могут изменять свое положение с помощью винтов, позволяющих проводить юстировку оптических блоков и фиксировать их положение на калибровочном стенде. Погрешности калибровок заносят в паспортные данные. Входные окна оптических блоков ФПУ 2, 3 расположены на одной осевой линии и на меньшем, по сравнению с прототипом, расстоянии L. На боковых поверхностях корпуса ФЭБ 1 закреплены держатели щитков 8, 9, 10, 11, в которые вставляются щитки 12, 13, 14, 15. Щитки 12, 13, 14, 15, выдвигаясь из держателей щитков 8, 9, 10, 11, прикрывают с боков входные окна оптических блоков ФПУ 2, 3, позволяя установить фотоэлектронную систему по направлению, параллельному траектории движения объектов 6. Перед измерениями ФЭБ прикрепляют к основанию и с помощью уровня устанавливают в горизонтальное положение. Диаграммы направленности ФПУ 1, ФПУ 2 в этом случае будут вертикальны, а плоскости зон блокировок будут расположены в направлении, перпендикулярном направлению движения объектов 7.
Измерительный модуль скорости 29 содержит аналого-цифровые преобразователи (АЦП) 32, 33, соединенные с выходами 30, 31 ФПУ 4 и ФПУ 5, компаратор 34, тактовый генератор 35, оперативные запоминающие устройства (ОЗУ) 36, 37, счетчик 38, микроконтроллер 39, один выход микроконтроллера 39 соединен по каналу связи RS-239 с ЭВМ 40 для отображения цифровых результатов измерений, а второй выход управляет работой счетчика 38, на вход которого поступает сигнал с выхода тактового генератора 35, определяющего частоту дискретизации, сигналы с выхода счетчика 38 поступают на входы ОЗУ 36, 37 и входы АЦП 32, 33,
Фотоэлектронная система работает следующим образом. Разъемом подключения 16 ФЭБ подключают к ЭВМ 40, включают источник питания, оператор запускает программу проверки фотоэлектронной системы, после чего система готова к измерениям. Оптические сигналы от объектов через входные окна оптических блоков ФПУ 2, 3 поступают на ФПУ 4, 5. На выходах 30, 31 ФПУ возникают напряжения аналоговых сигналов, они поступают на АЦП 32, 33. Длительности фронтов аналоговых сигналов зависят от ширины диаграммы направленности ФПУ. АЦП 32, 33 осуществляют преобразование аналоговых сигналов в цифровой код. Цифровой код поступает на компаратор 34 и на ОЗУ 36, 37. Компаратор 34 запрограммирован на заданный уровень входных сигналов, отличных от шума. При появлении летящего объекта над ФПУ 4 возникает аналоговый сигнал, превышающий уровень шума. Компаратор 34 срабатывает и запускает работу счетчика импульсов 38. На вход счетчика импульсов 38 поступает сигнал с тактового генератора 35, с выхода которого сигнал с частотой дискретизации поступает на АЦП 32, 33 и ОЗУ 36, 37.
Наличие компаратора 34 в качестве элемента запуска процесса измерений дает возможность локализовать процесс измерения в самом ФЭБ, что позволяет увеличить ресурсы памяти ОЗУ. В прототипе элемент запуска, датчик вспышки, расположен за пределами ФЭБ, что не позволяет полностью использовать ресурсы памяти ОЗУ. Увеличение ресурсов памяти ОЗУ позволяет увеличить частоту дискретизации АЦП. Это приводит к увеличению точности измерения времени пролета объектом базы ФЭБ, что в конечном итоге приводит к увеличению точности измерения скорости объекта. Использование измерительного модуля скорости, включающего компаратор, позволяет исключить датчик вспышки из конструкции фотоэлектронной системы, использовать АЦП с большей частотой дискретизации, что повышает надежность и помехозащищенность системы, а также увеличивает точность измерения скорости объектов.
Сигналы с выходов ОЗУ 36, 37 поступают на вход микроконтроллера 39, с одного выхода которого сигналы по каналу связи RS-232 поступают на ЭВМ, а с другого на вход счетчика 38 для управления его работой. Для измерения скорости объектов используются сигналы, лежащие в отрицательной области значений на временной характеристике сигналов, амплитуды которых пропорциональны поперечному размеру пролетающего объекта. Обработку цифрового кода микроконтроллер 39 осуществляет программным способом, сдвигая значения одного из ОЗУ по адресам. Значения ОЗУ 1, ОЗУ 2 соответствуют конкретным амплитудам сигналов в текущий момент времени, которые пропорциональны площадям перекрытия световых потоков, величине тени над ФПУ. Микроконтроллер 39 при измерении скорости объектов отсекает цифровой код сигналов, соответствующий излучению объекта в инфракрасном диапазоне длин волн. При каждом сдвиге, равном периоду тактового генератора, определяется разность значений по всем адресам ОЗУ 36, 37, запоминают полученный результат и величину сдвига. Полученный результат сравнивается с предыдущим. Микроконтроллер 39 из этих двух значений находит наименьшее и производит запоминание этого наименьшего значения и соответствующей ему величины сдвига. В результате всех сдвигов будет найдено наименьшее расхождение значений и соответствующее ему количество сдвигов. Число сдвигов, умноженное на период тактового генератора 35, дает время пролета объекта t над фиксированным значением базы. По известному значению базы устройства L вычисляют скорость летящего объекта по формуле V=L/t. Вычисленное значение скорости объекта передается по каналу связи RS-232 на ЭВМ 40 для отображения результатов измерений.
С помощью фотоэлектронной системы можно также анализировать форму объекта, определять тип объекта и характер оптического излучения объекта. Для анализа формы, определения типа объекта и характера оптического излучения объекта сигнал в цифровом виде с ФЭБ передается по каналу связи RS-232 на ЭВМ 40, где на экране монитора можно наблюдать временные характеристики сигнала. Определение типа объекта происходит путем визуального наблюдения формы сигнала в отрицательной области значений на временной характеристике сигнала в масштабе времени и сравнения ее с данными таблицы. Табличным данным соответствуют определенные типы объектов.
Технические решения, положенные в основу построения фотоэлектронной системы для осуществления заявляемого способа, соответствуют современному уровню развития электроники. Заявляемое изобретение может быть использовано при модификации измерительной фотоэлектронной системы, разрабатываемой Нижегородским научно-исследовательским приборостроительным институтом «КВАРЦ».
Источник информации
1. Описание изобретения к патенту N 2241945 «Фотоэлектронная система», МПК F 41 A 31/00, G 01 P 3/68.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАССИВНЫЙ СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ ОБЪЕКТОВ И ФОТОПРИЕМНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2265227C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ОБЪЕКТА | 1994 |
|
RU2089916C1 |
| Устройство автоматического получения и обработки изображений | 2019 |
|
RU2707714C1 |
| ФОТОЭЛЕКТРОННАЯ СИСТЕМА | 2003 |
|
RU2241945C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ УТЕЧЕК В ТРУБОПРОВОДЕ | 1994 |
|
RU2081369C1 |
| ЛАЗЕРНЫЙ ДОЗИМЕТР ДЛЯ ИЗМЕРЕНИЯ ОБЛУЧЕННОСТИ, СПОСОБ АВТОМАТИЗИРОВАННОГО ИЗМЕРЕНИЯ ОБЛУЧЕННОСТИ | 2002 |
|
RU2250442C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ | 2004 |
|
RU2274837C2 |
| ОПТИЧЕСКАЯ ПОЛЯРИЗАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИНФРАКРАСНЫМ ПРИЕМНИКОМ ИЗЛУЧЕНИЯ | 2023 |
|
RU2825219C1 |
| ЛАЗЕРНЫЙ ИМПУЛЬСНЫЙ ДАЛЬНОМЕР | 2014 |
|
RU2551700C1 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО СЧИТЫВАНИЯ ДЛЯ ФОТОПРИЕМНИКОВ | 2007 |
|
RU2357323C1 |
Группа изобретений относится к измерительной технике. Фотоэлектронная система содержит ЭВМ, фотоэлектронный блок с двумя фотоприемными устройствами, оптические блоки фотоприемных устройств. Оптические блоки выполнены с возможностью юстировки на калибровочном стенде. Каждый оптический блок включает несколько однотипных фотодиодов и линзу. Линза выполнена цилиндрической. Способ включает использование фотоэлектронной системы на основе ЭВМ, фотоэлектронного блока с двумя фотоприемными устройствами. В каждом фотоприемном устройстве применяют несколько однотипных фотодиодов и цилиндрическую линзу. С торцов линзы устанавливают щитки. В фотоэлектронном блоке устанавливают измерительный модуль скорости. При появлении объекта над фотоэлектронной системой с помощью компаратора производят запуск процесса измерения скорости объекта. С фотоэлектронного блока передают в цифровом виде результаты измерений скорости объекта на ЭВМ. Технический результат - повышение точности измерений и чувствительности фотоэлектронной системы, увеличение площади зоны блокировки. 2 н. и 6 з.п. ф-лы, 4 ил.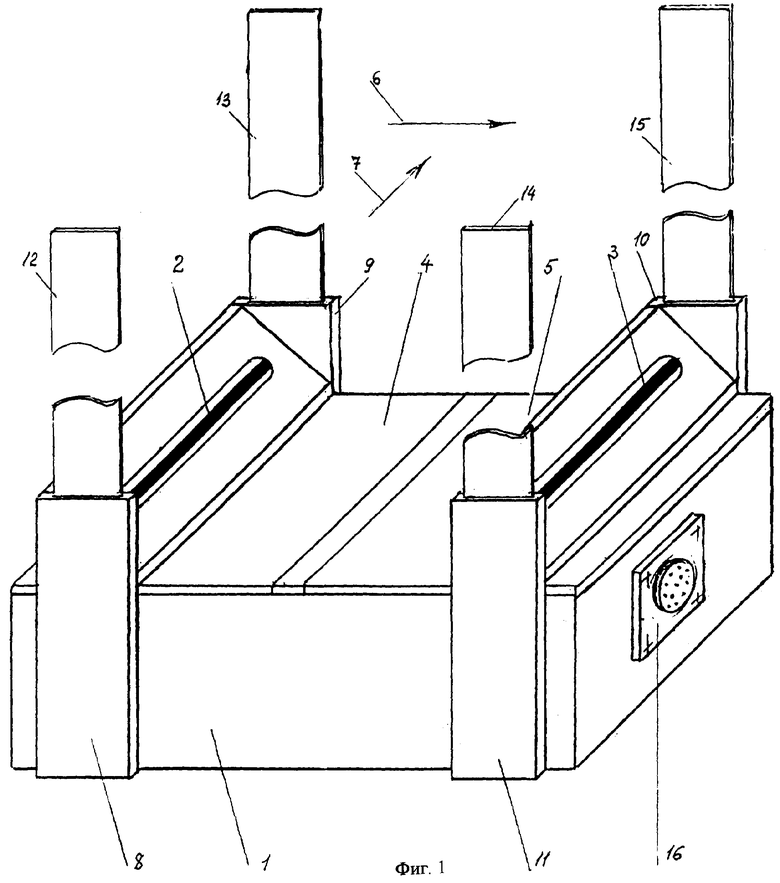
| ФОТОЭЛЕКТРОННАЯ СИСТЕМА | 2003 |
|
RU2241945C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЛОСКИХ СЕКЦИЙ КОРПУСОВ СУДОВ | 2020 |
|
RU2754420C1 |
| КОМПОСТНЫЙ ТУАЛЕТ | 1992 |
|
RU2037478C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДУЛЬНОЙ СКОРОСТИ СНАРЯДА | 2000 |
|
RU2204111C2 |

