Предлагаемое изобретение относится к измерительной технике, для измерения расстояния до различных предметов на местности с использованием излучения лазеров.
Известен лазерный импульсный дальномер (патент РФ №2324145 C1, G01C 3/00, заявл. 09.11.2006). Лазерный дальномер содержит два импульсных лазера (ПКГ) с оптической системой, усилитель импульсов накачки ПКГ, управляемый генератор импульсов накачки ПКГ, фотоприемник с оптической системой, сопряженной с полем оптической системы ПКГ, усилитель фотодетектированных сигналов, два компаратора, измеритель временных интервалов, индикатор обнаружения объекта, синхронизатор, интеграторы, сумматор, регулятор питания фотоприемника, формирователь импульсов запрета, управляемый счетчик, генератор строба.
Недостатком данного лазерного дальномера является невысокая дальность обнаружения. Для достоверного определения дальности требуется, чтобы отраженный сигнал превышал уровень шумов. На Фиг.1 полезный сигнал выделяется компаратором 11 и управляемым счетчиком 14 и порог на компараторе выставляется выше уровня шумов, иначе будет ложное срабатывание от шумов.
Кроме того, известен лазерный импульсный дальномер (патент РФ №2288449 C2, G01C 3/08, заявл. 28.06.2004), являющийся прототипом предлагаемого изобретения и состоящий из соединенных между собой задающего импульсного генератора, генератора накачки и лазера, а также формирующей оптики, выход которой оптически соединен с фотоприемным трактом, состоящим из последовательно соединенных фотодетектора, дифференцирующего каскада, предусилителя и видеоусилителя, выход которого, являющийся выходом фотоприемного тракта, последовательно соединен со старт-стопным измерителем дальности и индикатором дальности, а лазер оптически соединен с формирователем стробирующего сигнала, выход которого соединен с управляющим входом видеоусилителя и с управляемым входом старт-стопного измерителя дальности, между выходом фотоприемного тракта и входом старт-стопного измерителя дальности последовательно подключенные блок взвешенного разнополярного суммирования сигналов, принимаемых от отдельных подряд расположенных по дальности участков лоцирования, а также устройство поиска максимума, определяющее участок лоцирования, соответствующий максимальной накопленной при суммировании амплитуде сигнала, и счетчик m из n для проверки достоверности селекции участка лоцирования соответствующего максимальной накопленной при суммировании амплитуде сигнала, которые по управляемым входам соединены с выходом формирователя стробирующего сигнала.
Недостаток прототипа - слишком большая погрешность измерения (±5 м), т.к. блок взвешенного суммирования в составе УВХ, разнополярного АЦП, умножителя и ОЗУ не позволяет достичь высокого быстродействия из-за высокой разрядности умножителя, сумматора и ОЗУ.
Задачей предлагаемого изобретения является снижение погрешности измерения и улучшение массогабаритных показателей дальномера.
В основу предлагаемого изобретения на устройство положен «Способ некогерентного накопления светолокационных сигналов» (патент РФ №2359226 C1, заявл. 10.10.2007, опубл. 20.06.2009). Как показано в этом изобретении оптимальным для обнаружения и требующим минимума объема аппаратуры, меньшей разрядности устройств, являются двухуровневые накопители, при этом эффективность накопления приближается к теоретическому пределу. Устройство накопления суммирует, либо вычитает единицу, поэтому требует меньшей разрядности и работает с более высокими тактовыми частотами, а значит дискретность дальности и соответственно погрешность измерения будет меньше, чем у многопорогового устройства накопления. В прототипе как раз используется многопороговый накопитель на основе АЦП, требует больше двоичных разрядов при накоплении и поэтому обладает меньшим быстродействием и соответственно большей погрешностью измерения.
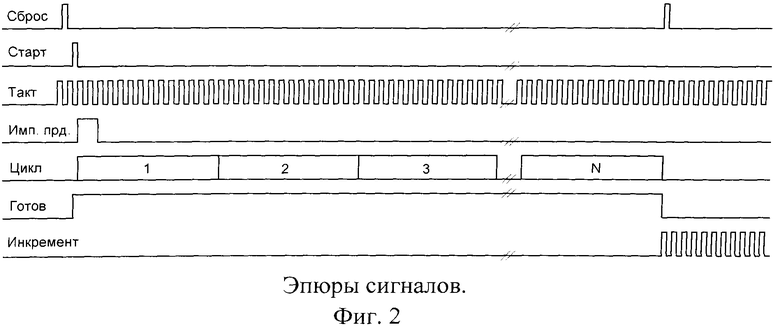
На фиг.1 приведена функциональная схема лазерного дальномера, на фиг.2 - эпюры сигналов. Предлагаемое устройство (фиг.1) содержит:
1 - управляемый источник питания (УИП);
2 - микроконтроллер (МК);
3 - оптическая система;
4 - лавинный фотодиод (ЛФД);
5 - усилитель фотодетектированных сигналов;
6 - умножитель;
7 - фильтр нижних частот (ФНЧ);
8 - аналого-цифровой преобразователь (АЦП);
9 - цифроаналоговый преобразователь (ЦАП);
10 - компаратор;
11 - инвертирующий усилитель;
12 - компаратор;
13 - мультиплексор;
14 - сумматор;
15 - оптическая система приемника;
16 - импульсный полупроводниковый лазер;
17 - схема накачки лазера;
18 - схема сравнения;
19 - мультиплексор;
20 - оперативное запоминающее устройство (ОЗУ);
21 - генератор тактовых импульсов (ГТИ);
22 - мультиплексор;
23 - счетчик;
24 - счетчик;
25 - схема сравнения;
26 - индикатор дальности;
27 - схема сравнения;
28 - триггер.
Запуск измерения инициируется МК, который выдает сначала сигнал «Сброс», который сбрасывает счетчики 23 и 24 в нулевое состояние. Нулевой код счетчика 24 поступает на первый вход схемы сравнения 25, которая выдает на выходе сигнал равенства высоким уровнем, поступающим на вход выбора данных мультиплексора 19. Мультиплексор выбирает второй вход, т.е. нулевой код. Выход мультиплексора подключен к входу данных ОЗУ, поэтому в первый период будет производиться обнуление ячеек памяти ОЗУ, а во второй и последующие периоды мультиплексор переключится на выход сумматора 14 и будет осуществляться накопление.
После выдачи сигнала «Сброс», МК формирует сигнал «Старт» импульсом высокого уровня, поступающим на вход установки триггера 28. Выход триггера устанавливается в логическую единицу «1», переключает мультиплексор 22 на трансляцию ГТИ 21 и устанавливает режим записи данных ОЗУ 20. Счетчик 23 инкрементируется с частотой ГТИ, выходной код которого поступает на схему сравнения 18 и адресный вход ОЗУ. На второй вход схемы сравнения 18 подается двоичный код «M», задающий длительность излучаемого светового импульса лазера. Выход схемы сравнения 18 устанавливается в «1», когда код счетчика 23 будет меньше кода «M». Сигнал высокого уровня схемы сравнения поступает на схему накачки 17, которая формирует требуемый ток накачки для лазера 16. Когда код счетчика 23 превысит код «M», схема сравнения 18 выдаст сигнал логического нуля, завершая формирование импульса излучаемого светового сигнала лазера.
Отраженный от препятствия световой сигнал поступает на оптическую систему 3 и далее фокусируется на приемную площадку ЛФД. Фотодетектированный сигнал ЛФД, представляющий смесь полезного сигнала с фоновым излучением и шумами, усиливается усилителем 5 и поступает на аналоговый умножитель 6 и компараторы 10 и 12. Умножитель 6 производит математическую операцию возведения в квадрат и далее с помощью ФНЧ сигнал фильтруется, что эквивалентно операции интегрирования. С помощью АЦП сигнал преобразуется в цифровой двоичный код, поступающий в МК. МК производит над этим сигналом операцию извлечения квадратного корня, получая среднеквадратичное (эффективное) значение шума с сигналом. На больших дальностях уровень сигнала значительно меньше среднеквадратичного значения шума, поэтому с большой точность будет вычисляться эффективное значение шума.
Одной из задач МК является поддержание эффективного уровня шума во всем диапазоне температур, которое выполняется путем регулирования напряжения питания ЛФД. Для этого вычисленное эффективное значение шума сравнивается с заданным порогом, если значение шума больше порога, то напряжение питания ЛФД уменьшается, а если меньше, то увеличивается. Управление производится кодом, выдаваемым на УИП1. Изменение напряжения на ЛФД приводит к изменению коэффициента умножения фотодиода и соответственно к изменению уровня сигнала с фоновым излучением и собственного уровня шума.
Кроме этого МК устанавливает оптимальный уровень напряжения - порог на вторые входы компараторов 10 и 12. Как показано в выше упомянутом способе некогерентного накопления, оптимальным порогом обнаружения являются уровни +0,5σ и -0,5σ, где σ - среднеквадратичное значение шума. МК выдает на ЦАП 9 код, выходное напряжение которого будет равно 0,5 Uэф. На выходе инвертирующего усилителя 11 выдается отрицательное напряжение -0,5 Uэф. Компаратор 10 выдает логическую (лог.) «1», если входное напряжение превышает 0,5 Uэф, и лог. «0», если не превышает. Компаратор 12 выдает лог. «1», если входное напряжение меньше (ниже) -0,5 Uэф и логический «0», если больше порога.
Выходные сигналы компараторов подаются на входы выбора данных мультиплексора 13. Если компаратор 10 и компаратор 12 выдают уровень лог. «0», то в мультиплексоре 13 выбирается первый вход с заданным двоичным кодом «0» и на вход сумматора 14 подается нулевой код - нет накопления. Если компаратор 10 выдает лог. «1», а компаратор 12 лог. «0», то в мультиплексоре 13 выбирается второй вход с двоичным кодом «1», и в сумматоре производится сложение выходного кода текущей ячейки ОЗУ с «1». Выходной код сумматора транслируется через мультиплексор 19 и подается на вход и записываются в ОЗУ с тем же адресом, с которым и считывался. Чтение и запись в ОЗУ производится за один такт частоты ГТИ. Если компаратор 10 выдает лог. «0», а компаратор 12 лог. «1», то в мультиплексоре 13 выбирается третий вход с двоичным дополнительным кодом «-1», и в сумматоре производится сложение выходного кода текущей ячейки ОЗУ с «-1», т.е. вычитание единицы. С каждым новым тактом ГТИ увеличивается задержка от момента излучения лазера и соответственно каждый адрес ОЗУ однозначно «привязан» к определенной дискретной дистанции. В каждой ячейке ОЗУ происходит накопление сигнала.
После записи последней ячейки ОЗУ, следующим тактом счетчик 23 обнуляется и выдает по второму выходу импульс переноса, поступающий на тактовый вход счетчика 24, состояние которого увеличивается на «1». Начинается новый период излучения импульса лазера и накопления. Как только состояние счетчика 24 достигнет кода «N» схема сравнения 27 выдаст на выходе равенства лог. «1» и сбросит триггер 28 в нулевое состояние, сигнализируя об окончании накопления - сигнал «Готов», поступающий на вход МК, вход выбора данных мультиплексора 22 и на вход записи ОЗУ, переводя его в состояние чтения.
После получения сигнала «Готов» начинается обработка накопленной информации МК. Сначала МК переписывает содержимое ОЗУ в свое внутреннее ОЗУ, для этого МК выдает импульс «Сброс», переводя счетчик 23 в нулевое состояние, затем считывает ячейку памяти ОЗУ через порт ввода и записывает код во внутренний массив памяти. Потом выдает импульс инкремента, который через мультиплексор 22 поступает на тактовый вход счетчика 23, увеличивая состояние счетчика на «1». На выходе ОЗУ появляются данные из первой ячейки памяти, которые считываются МК и записываются в первую ячейку внутреннего массива памяти. Так процесс считывания и записи продолжается до конца всей памяти.
После перезаписи информации МК производит нормирование накопленных значений по дальности путем умножения массива данных на весовые коэффициенты, значения которых зависят от дальности. На меньших дальностях коэффициенты меньше, зависимость на начальном участке дальности квадратичная, далее коэффициент постоянен. Операция умножения выравнивает чувствительность системы по дальности и снижает амплитуду сигнала обратного рассеивания от аэрозольных помех.
После нормирования информации МК производит поиск максимума в массиве внутренней памяти. Максимум берется не по одной ячейке памяти, а по сумме из «M» подряд расположенных ячеек памяти, равных по количеству тактов длительности излученного лазером импульса и соответственно принятого импульса. Поиск ведется не с нулевого адреса, а с определенного, соответствующего минимальной дальности, исключая переходный процесс приемного тракта от воздействия излученного импульса лазера. Найденный максимум сравнивается с порогом, и если он превышает порог, то результат считается достоверным.
Среднеквадратичное значение шума в накопителе после накопления N периодов будет равно:
В то же время известно, что для задания вероятности обнаружения отраженного сигнала равной 0,99 требуется, чтобы отношение сигнал/шум было не менее 6, поэтому порог обнаружения должен быть равен 
Увеличение отношения сигнал/шум в результате накопления составит 
Для дальнейшего повышения точности измерения и уменьшения погрешности МК находит энергетический центр в найденной максимальной сумме из М элементов, например для M=6 время задержки отраженного сигнала будет равно

где
Здесь j - номер дискрета времени, в котором накопленная сумма максимальна, K(а) - накопленная сумма в (a)-м дискрете, p - поправочное число, характеризующее точку временной фиксации, ΔT - длительность дискрета (период ГТИ).
Формулы приведены на стр.122 В. Вильнер, А. Ларюшин, Е. Рудь «Методы повышения точности импульсных лазерных дальномеров», ж. Электроника: Наука, Технология, Бизнес 3/2008.
При тактовой частоте ГТИ равной 150 мГц длительность дискрета равна 1 м, нахождение задержки по вышеприведенным формулам повышает точность измерения до 0,2 м.
Дальность определяется по формуле
D=C·Tз/2,
где C=3·108 м/с - скорость света.
Реализация цифровой части, включая микроконтроллер, может быть выполнена на современной элементной базе - на программируемой логической интегральной схеме (ПЛИС), что позволяет снизить массогабаритные параметры дальномера.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2006 |
|
RU2324145C1 |
| Лазерный импульсный дальномер | 2022 |
|
RU2791186C1 |
| ЦИФРОВОЙ ДАЛЬНОМЕР | 1992 |
|
RU2069003C1 |
| ОПТИЧЕСКИЙ ДАЛЬНОМЕР | 1999 |
|
RU2155322C1 |
| ЛАЗЕРНЫЙ ИМПУЛЬСНЫЙ ДАЛЬНОМЕР | 2004 |
|
RU2288449C2 |
| Лазерный обнаружитель оптических сигналов | 2023 |
|
RU2816284C1 |
| АДАПТИВНЫЙ ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 1990 |
|
RU2012013C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО | 2005 |
|
RU2304792C1 |
| Многоканальное устройство тестового контроля логических узлов | 1990 |
|
SU1837295A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1993 |
|
RU2037842C1 |
Изобретение относится к измерительной технике, для измерения расстояния до различных предметов на местности, с использованием излучения лазеров. Дальномер содержит импульсный полупроводниковый лазер с оптической системой, схему накачки лазера, лавинный фотодиод с оптической системой, последовательно соединенный с усилителем фотодетектированных сигналов, управляемый источник питания (УИП) для лавинного фотодиода, умножитель, фильтр нижних частот (ФНЧ), аналого-цифровой преобразователь (АЦП), микроконтроллер (МК), цифроаналоговый преобразователь (ЦАП), инвертирующий усилитель, два компаратора, трехвходовой мультиплексор, сумматор, два двухвходовых мультиплексора, оперативное запоминающее устройство (ОЗУ), генератор тактовых импульсов, счетчик адреса, счетчик количества накоплений, три схемы сравнения, триггер, индикатор дальности. Технический результат - снижение погрешности измерения и улучшение массогабаритных показателей дальномера. 2 ил.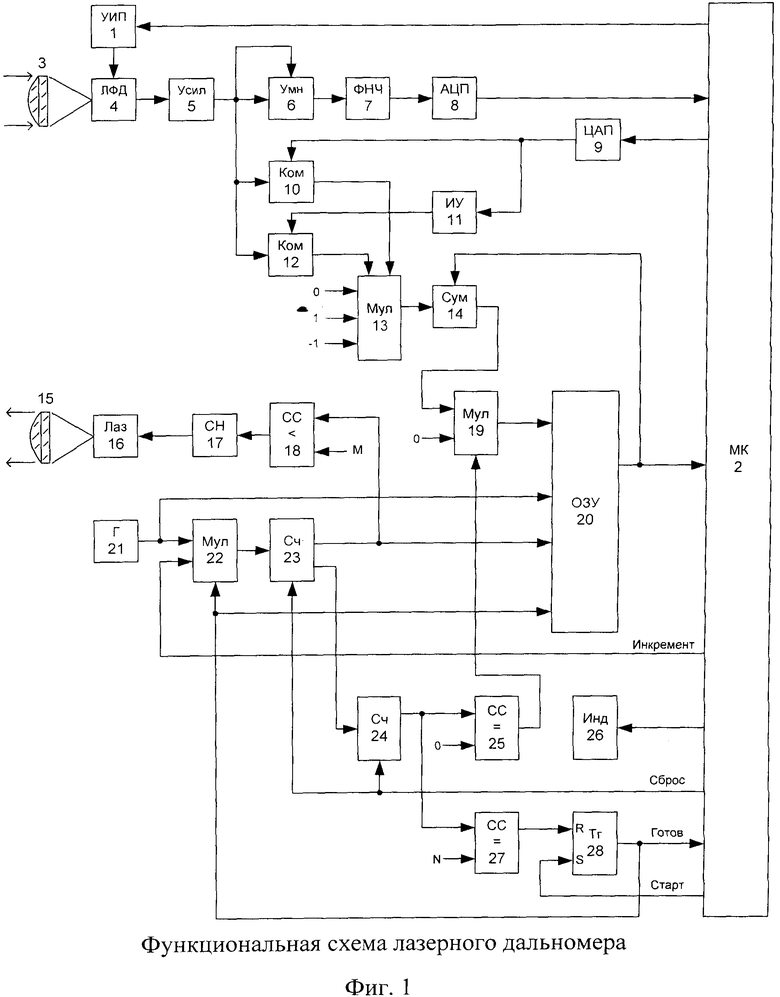
Лазерный импульсный дальномер, состоящий из последовательно соединенных между собой импульсного полупроводникового лазера с оптической системой и схемой накачки лазера, а также из последовательно соединенных между собой лавинного фотодиода (ЛФД) с оптической системой, усилителя фотодетектированных сигналов, а также состоящего из управляемого источника питания (УИП), генератора тактовых импульсов, оперативного запоминающего устройства (ОЗУ), микроконтроллера (МК) и индикатора дальности, причем первый выход МК соединен с входом УИП, выход которого соединен с входом питания ЛФД, выход ОЗУ соединен со вторым входом МК, а выход генератора тактовых импульсов соединен с тактовым входом ОЗУ, четвертый выход МК соединен с входом индикатора дальности, отличающийся тем, что введены умножитель, фильтр нижних частот (ФНЧ), аналого-цифровой преобразователь (АЦП), первый и второй компаратор, цифроаналоговый преобразователь (ЦАП), инвертирующий усилитель, первый, второй и третий мультиплексор, сумматор, первая, вторая и третья схема сравнения, первый и второй счетчик и RS триггер, причем выход усилителя фотодетектированных сигналов соединен с первым и вторым входом умножителя, а также с первым входом первого и первым входом второго компаратора, выход умножителя подключен к входу ФНЧ, выход которого соединен с входом АЦП, выход АЦП подключен к первому входу МК, второй выход МК соединен с входом ЦАП, выход которого подключен к второму входу компаратора и входу инвертирующего усилителя, выход которого соединен со вторым входом второго компаратора, выход первого и второго компаратора подключены соответственно к первому и второму входу выбора данных первого мультиплексора, на первый вход которого подается двоичный код нуля, на второй вход подается двоичный код единицы, а на третий вход двоичный код минус единицы в дополнительном коде, выход первого мультиплексора подключен к первому входу сумматора, второй вход которого соединен с выходом ОЗУ, выход сумматора подключен к первому входу второго мультиплексора, на второй вход которого подается двоичный код нуля, выход второго мультиплексора соединен с входом данных ОЗУ, первый вход третьего мультиплексора подключен к выходу генератора тактовых импульсов, а второй вход соединен с третьим выходом МК, выход третьего мультиплексора подключен к тактовому входу первого счетчика, выход которого соединен с первым входом первой схемы сравнения и входом адреса ОЗУ, выход переноса первого счетчика соединен с тактовым входом второго счетчика, выход которого подключен к первому входу второй и третьей схемы сравнения, на второй вход первой схемы сравнения подается двоичный код длительности импульса излучения "M", выход первой схемы сравнения соединен со схемой накачки лазера, на второй вход второй схемы сравнения подается двоичный код нуля, а на второй вход третьей схемы сравнения подается двоичный код количества импульсов накопления «N», выход равенства второй схемы сравнения соединен с входом выбора данных второго мультиплексора, а выход равенства третьей схемы сравнения подключен к входу сброса триггера, выход которого соединен с третьим входом МК, входом выбора данных третьего мультиплексора и входом записи ОЗУ, пятый выход МК соединен с входом сброса первого и второго счетчика, а шестой выход МК подключен к входу установки триггера.
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ПРИ ПОЛУАКТИВНОМ ПОДСВЕТЕ И ИМПУЛЬСНЫЙ ДАЛЬНОМЕР | 2006 |
|
RU2332686C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2394255C2 |
| Выдувательный механизм к автоматическим машинам конвейерной системы | 1930 |
|
SU34723A1 |
| WO 2013148681 A1, 03.10.2013 | |||

