Изобретение относится к радиотехнике, в частности к радиопеленгации, и может быть использовано в системах определения местоположения источников радиоизлучения.
Известен способ пеленгования источника радиосигнала, включающий когерентный прием и синхронную регистрацию сигналов для всех баз, образованных опорной и всеми входящими в решетку антеннами, измерение, с применением преобразования Фурье, их комплексной амплитуды  где m=1,2,...,N - номер антенны, умножение комплексной амплитуды на диаграмму направленности антенны
где m=1,2,...,N - номер антенны, умножение комплексной амплитуды на диаграмму направленности антенны  определение, для возможных значений азимута θ и угла места β с заданным шагом наведения решетки по азимуту и углу места, комплексного углового спектра по формуле
определение, для возможных значений азимута θ и угла места β с заданным шагом наведения решетки по азимуту и углу места, комплексного углового спектра по формуле  по положению максимума модуля которого определяют пеленг на источник излучения [Патент РФ №2158002, G 01 S 3/14, 5/04, 1999 г].
по положению максимума модуля которого определяют пеленг на источник излучения [Патент РФ №2158002, G 01 S 3/14, 5/04, 1999 г].
Недостатком данного способа является сложность, связанная с необходимостью выполнения большого объема операций над сигналом, особенно когда необходимо обеспечить малый шаг дискретизации положения диаграммы направленности решетки, или низкая точность - когда шаг дискретизации увеличен. Количество операций наведения диаграмм направленности антенн, при дискретности 1°, составляет 360·90·N=32400·N итераций.
Наиболее близким по технической сущности к предлагаемому является способ пеленгования источника радиосигнала, включающий прием сигнала с помощью ненаправленных антенн, образующих кольцевую эквидистантную решетку с четным числом элементов, измерение разности фаз между сигналами диаметрально противоположных антенн и определение по ним азимута и угла места [Мезин В.К. Автоматические радиопеленгаторы. М., Сов. радио, 1969 г., стр.105-110].
Данный способ менее сложен в реализации. Вместе с тем, недостатком способа является ограниченность верхней частоты пеленгуемых сигналов, которая должна удовлетворять условию R/λ<1/4, где R - радиус решетки, λ - длина волны излучения. Ограничение обусловлено объективной необходимостью обеспечения однозначности фазовых измерений. Кроме того, область применения способа ограничивается вариантами антенных решеток с четным числом элементов.
Задачей данного изобретения является расширение области применения за счет увеличение допустимого значения верхней частоты пеленгуемых сигналов.
Это достигается тем, что в известном способе пеленгования источника радиосигнала, заключающемся в приеме сигнала с помощью ненаправленных антенн, образующих кольцевую эквидистантную решетку, и измерении разности фаз между сигналами, принятыми антеннами, измеряют две группы разностей фаз между сигналами в двух группах антенн, векторы, соединяющие пары антенн, в которых коллинеарны, а по совокупности разностей фаз в группах методом многошкальных измерений, с учетом различий взаимных удалений антенн, оценивают однозначные на расстоянии диаметра решетки набеги фаз сигнала и определяют азимут и угол места по формулам

где 

V, U - набеги фаз сигнала в первой и второй группе, γ1, γ2 - углы поворота векторов, соединяющих пары антенн первой и второй группы, относительно опорного направления, R - радиус решетки, λ - длина волны излучения.
Сопоставительный анализ заявленного решения с прототипом показывает, что предложенный способ отличается от известного наличием, во-первых, новых действий над сигналом: оценивают однозначные на расстоянии диаметра решетки набеги фаз сигнала, во-вторых, новых условий осуществления действий: измеряют две группы разностей фаз между сигналами в двух группах антенн, векторы, соединяющие пары антенн в которых, коллинеарны; однозначные на расстоянии диаметра решетки набеги фаз сигнала оценивают по совокупности разностей фаз в группах; оценивание выполняют методом многошкальных измерений с учетом различий взаимных удалений антенн; определяют азимут и угол места по отличным от прототипа формулам.
При изучении других известных технических решений в данной области техники указанная совокупность признаков, отличающая изобретение от прототипа, не была выявлена.
Измерение разностей фаз между сигналами в группе антенн, векторы, соединяющие пары антенн в которых, коллинеарны, с учетом различий взаимных удалений антенн, позволяет рассматривать результаты измерений разностей фаз как отсчеты величин в многошкальной системе и применить известные методы многошкальных измерений [Поваляев А.А. Об оценке максимального правдоподобия в многошкальном измерительном устройстве. Радиотехника и электроника. Том XXI, №5, 1976 г., с.1024-1049]. Учитывая иррациональные соотношения удалений антенн в группах (цену шкал - в терминах многошкальных измерений) потенциально (в отсутствии шумов и других дестабилизирующих факторов) может достигаться однозначность оценки набега фаз сигнала при произвольном диаметре решетки и соответственно частоте пеленгуемого сигнала. Необходимость измерения двух групп разностей фаз и соответственно оценки двух набегов фаз (в направлении соответствующих векторов ориентации антенн) диктуется необходимостью определения однозначного пеленга и угла места.
Именно определение условий и использование возможности представления совокупности разностей фаз отсчетами величин многошкальной системы, в соответствии с предложенными новыми действиями над сигналом и условиями их осуществления, позволяет увеличить частотный диапазон пеленгуемых сигналов.
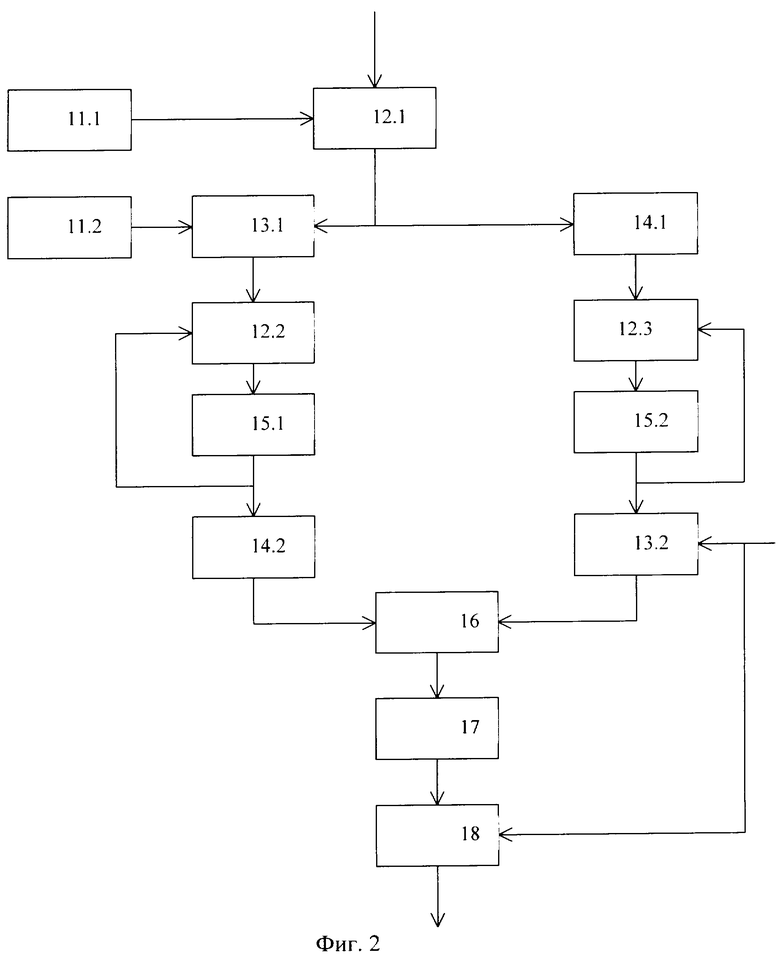
На фиг.1 приведена структурная схема устройства, реализующего предложенный способ, на фиг.2 - структурная схема варианта построения многошкального измерителя набега фаз, на фиг.3 - схема размещения антенн семиэлементной антенной решетки (в декартовой системе координат с осями X, Y, стрелками показаны векторы, соединяющие пары антенн: сплошная линия - при определении набега фазы в первой группе антенн V, пунктиром - набега фазы во второй группе U), на фиг.4 - результаты моделирования предлагаемого способа, на фиг.5 - модель устройства, реализующего предложенный способ в системе Mathcad-2000.
Устройство, реализующее предложенный способ, содержит (фиг.1): антенную решетку 1, состоящую из N антенн с номерами n=0, 1,...,N-1, подключенный к ней антенный коммутатор 2, двухканальное приемное устройство 3, измеритель разности фаз 4, многошкальный измеритель набега фаз 5, блок линейного преобразования 6, блок определения углов прихода радиоволн 7, включающий устройство определения фазы 8 и устройство определения модуля 9, подключенное выходом к входу функционального преобразователя 10 вида arccos X. Многошкальный измеритель набега фаз 5 содержит запоминающие устройства 11.1, 11.2, сумматоры 12.1-12.3, умножители 13.1-13.2, квадраторы 14.1-14.2, оперативные запоминающие устройства 15.1-15.2, вычитатель 16, устройство определения минимума функции 17 и делитель 18.
Выходы антенной решетки 1 подключены к входам антенного коммутатора 2, а через два его выхода и двухканальное приемное устройство 3 к входам измерителя 4 разности фаз. Измеритель разности фаз 4, многошкальный измеритель набега фаз 5 через первый вход сумматора 12.1 и блок линейного преобразования 6 соединены последовательно. Выход блока линейного преобразования 6 подключен к входам устройств 8 и 9. В многошкальном измерителе набега фаз 5 запоминающее устройство 11.1 выходом подключено ко второму входу сумматора 12.1 и через его выход к первому входу умножителя 13.1 и входу квадратора 14.1. Выход запоминающего устройства 11.2 через второй вход умножителя 13.1, первый вход сумматора 12.2, оперативное запоминающее устройство 15.1, квадратор 14.2 подключен к первому входу вычитателя 16. Выход квадратора 14.1 через первый вход сумматора 12.3, оперативное запоминающее устройства 15.2, первый вход умножителя 13.2 подключен ко второму входу вычитателя 16 и через него - к первому входу устройства 17. Выход запоминающего устройства 11.1 (11.2) дополнительно подключен ко второму входу сумматора 12.2 (12.3) и второму входу устройства определения минимума функции 17, выход которого соединен с первым входом делителя 18. Вторые входы умножителя 13.2 и делителя 16 объединены, и на них поступает внешняя константа. Выход делителя 18 является выходом многошкального измерителя 5, блока 8 - первым выходом устройства (азимут), а блока 10 - вторым выходом устройства (угол места).
Антенная решетка 1 состоит из симметричных вибраторов, размещенных по окружности, на одинаковом взаимном удалении. В конкретном рассматриваемом примере содержит N=7 антенн (фиг.2). Одна из антенн с номером 0 - опорная, ориентирована от центра окружности на север (опорное направление). Отсчет пеленга и нумерация других антенн по часовой стрелке с возрастанием номеров. Антенный коммутатор 2 производит переключение пар антенн из N=7 положений на два направления в последовательности номеров антенн: 1-6, 2-5, 3-4; 6-4, 0-3, 1-2. Таким образом, образуются две группы антенн: первая 1-6, 2-5, 3-4 и вторая 6-4, 0-3, 1-2. Векторы, соединяющие пары антенн в группе, как показано на фиг.3, коллинеарны. Углы поворота векторов, соединяющих пары антенн в первой и второй группе, для любого нечетного N равны γ1=-π/2, γ2=π-α/4, где α=2π/N. Общий принцип формирования групп в данном случае состоит в том, что антенны одной из пар являются соседними, а векторы, соединяющие другие антенны группы, коллинеарны вектору этой пары. Вторая группа антенн образуется аналогично, поворотом осей координат, в частности таким образом, что между векторами групп образуется максимально близкий π/2 угол пересечения (последнее положение не обязательно, но упрощает практическую реализацию способа). При этом набор взаимных расстояний между парами антенн в двух группах оказывается одинаковым, что позволяет унифицировать процесс многошкальных измерений набегов фаз. Такой принцип применим для систем с произвольным числом антенн. Если число антенн четно и равно 2r, где r=2,3,..., возможно образование групп, не содержащих соседних антенн, что не принципиально в смысле решаемой технической задачи. Приемное устройство 3 двухканального типа с настройкой каналов на частоту принимаемых сигналов. Внешняя константа, подаваемая на вторые входы умножителя 13.2 и делителя 18, равна  где α=2π/N. Другие элементы устройства являются типовыми и выполняются на цифровой элементной базе, в частности, цифровых микропроцессорах.
где α=2π/N. Другие элементы устройства являются типовыми и выполняются на цифровой элементной базе, в частности, цифровых микропроцессорах.
Принцип функционирования устройства состоит в следующем. Радиоизлучения передатчиков принимают с помощью антенн решетки 1 и поочередно подключаемого к парам антенн через коммутатор 2 приемного устройства 3. При каждом цикле переключения в блоке 4 измеряют разности фаз между сигналами соответствующей пары антенн.
Обозначим: Δϕn - разность фаз между сигналами антенн 1-6 (n=0), 2-5 (n=1), 3-4 (n=2), где n - номер разности фаз в группе. В отсутствии погрешностей измерений разности фаз равны:

где  - набег фаз сигнала между точками, удаленными на расстояние, равное диаметру решетки, α=2π/N, 〈·〉 - операция по модулю 2π (выделения остатка от деления величины, заключенной в скобки на 2π), R - радиус решетки, λ - длина волны излучения, θ, β - азимут и угол места прихода волны.
- набег фаз сигнала между точками, удаленными на расстояние, равное диаметру решетки, α=2π/N, 〈·〉 - операция по модулю 2π (выделения остатка от деления величины, заключенной в скобки на 2π), R - радиус решетки, λ - длина волны излучения, θ, β - азимут и угол места прихода волны.
Область значений Δϕn ограничена интервалом [-π,π], в результате чего измеренные значения отличаются от истинных на целое число периодов 2π. Набег фаз v, при максимальном значении 4πR/λ, неизвестен и подлежит оцениванию.
Из анализа формулы (1) следует, что совокупность разностей фаз можно рассматривать как отсчеты набега фаз v на трех шкалах измерителя с ценой деления пропорциональной sinαn. Аналогично выражение для группы разностей фаз применительно к антеннам 6-4, 0-3, 1-2 с учетом замены величины v на аналогичную

где γ2 - угол поворота векторов, соединяющих пары антенн второй группы.
Измеренные значения разностей фаз по мере переключения пар антенн поступают в многошкальный измеритель набега фаз 5, где по истечении первых трех циклов оценивают набег фаз v, а через три последующих - u.
Существо процесса оценивания состоит в следующем.
Для каждого значения Δϕn определяют возможные, с учетом кратности 2π, утраченной при измерении, однозначные значения разности фаз

где kn-j=0, ±1, ±2,... - возможные значения кратностей, j=0,1,2,...,(J-1) – номер комбинации кратностей, при общем числе комбинаций J.
По совокупности n для каждого j оценивают дисперсию разности фаз:

где 
Среди всех D(j) определяют минимальное, а также соответствующее ему значение j:

и оценивают искомый параметр в точке положения минимума дисперсии
V=S1(jmin)/S2.
Возможные значения кратностей Кn.j определяют до начала процесса пеленгования, например, путем отбора неповторяющихся вариантов при изменении параметра Р в выражении

где 〈〈·〉〉 - целая часть числа, заключенного в скобки, 
Другие методы поиска совокупности кратностей содержатся, например, в [Поваляев А.А. Об оценке максимального правдоподобия в многошкальном измерительном устройстве. Радиотехника и электроника. Том XXI, №5, 1976 г., с.1024-1049].
Для рассматриваемого устройства матрица кратностей при R/λ≤5, полученная в соответствии с (6), имеет вид:

Строки матрицы соответствуют номерам разностей фаз n=0, 1, 2, а столбцы номерам комбинаций кратностей j=0,1,...,23. Комбинации с отрицательными кратностями для j=23,24,...,46 располагаются симметрично относительно столбца с номером 0. Поэтому общее количество комбинаций составляет J=47.
Реализация процедуры оценки набега фаз в многошкальном измерителе 5 происходит следующим образом.
Перед началом работы производят начальные установки: в запоминающее устройство 11.1 заносят таблицу переборов (7), значения которой предварительно умножают на -2π; в запоминающее устройство 11.2 записывают значения функции sinα(n+1) (промежуточная величина в (4)); устанавливают константу S2 по вторым входам умножителя 13.2 и делителя 18; очищают оперативные запоминающие устройства 15.1, 15.2. С поступлением результата первого измерения Δϕ0 к нему в сумматоре 12.1 поочередно в течение 47 тактов прибавляют возможные значения кратностей –К0,j 2π из устройства 11.1. Результаты умножают в умножителе 13.1 на значения sinα(0+1), поступающие из запоминающего устройства 11.2, суммируют в 12.2 с содержимым ячеек оперативного запоминающего устройства 15.1 (в первом такте - с нулевыми значениями) и вновь запоминают в 15.1. Одновременно результаты суммирования с выхода сумматора 12.1 возводят в квадрат в 14.1, суммируют в 12.3 с содержимым ячеек оперативного запоминающего устройства 15.2 и результат заносят в оперативное запоминающее устройство 15.2. С получением очередного значения Δϕ1 процесс обработки повторяют, и по прошествии трех циклов в оперативном запоминающем устройстве 15.1 накапливаются значения S1(j), а в оперативном запоминающем устройства 15.2 - значения S3(j). Величины S1(j) и S3(j) синхронно считывают из 15.1, 15.2 и после преобразования в блоках 13.2, 14.2, 16 получают значения дисперсии разности фаз (4). В устройстве определения минимума функции 17 среди значений дисперсии разности фаз определяют минимальное и регистрируют соответствующее ему (по j) значение S1(Jmin), поступающее с выхода оперативного запоминающего устройства 15.1. После завершения процесса считывания содержимого оперативных запоминающих устройств (и преобразований в 13.2, 14.2, 16) с выхода делителя 18 получают оценку набега фаз. При этом очищают оперативные запоминающие устройства 15.1, 15.2. В последующие три цикла переключения пар антенн (и 47·3 тактов работы многошкального измерителя набега фаз 5) проводят аналогичные действия над сигналом и оценивают набег фаз U во второй группе антенн.
В блоке 6 линейного преобразования значения V, U трансформируют в ортогональные составляющие вектора

где 

После чего в блоке 7 определяют азимут и угол места пеленгуемого источника как аргумент (в устройстве 8) и арккосинус (в блоке 10) модуля (в устройстве 9) полученного вектора:


с выдачей результатов оценки 
 на выходы устройства.
на выходы устройства.
При когерентном приеме и синхронной регистрации сигналов одновременно всех антенн (как в аналоге) описанные процессы обработки распараллеливают с применением многопроцессорных систем.
Для оценки технического результата, достигаемого предлагаемым способом (расширение области применения за счет увеличения допустимого значения верхней частоты пеленгуемых сигналов), с использованием модели фиг.5, проведено математическое моделирование процессов обработки. Приняты следующие исходные данные: отношение R/λ равно 5, отношение амплитуды сигнала к среднему квадратическому значению некоррелированного гауссовского шума при измерении разностей фаз - 10 (среднее квадратическое отклонение результатов измерения разности фаз около 8°), угол места β=10°. Результаты моделирования приведены на фиг.4 в виде зависимостей измеренного значения азимута от истинного - слева и измеренного значения угла места от азимута пеленгуемого источника - справа. Единицы измерения углов даны в градусах. Из анализа результатов моделирования следует, что предлагаемый способ обеспечивает устойчивое (с вероятностью аномальной (свыше 10°) ошибки не более 3·10-3) пеленгование сигнала при типовом отношении сигнал-шум, равном 10, и отношении R/λ=5. По сравнению с прототипом обеспечивается увеличение частоты пеленгуемого сигнала в 20 раз (увеличение допустимого отношения R/λ с 0,25 до 5). Область применения способа охватывает при этом варианты с произвольным числом антенн решетки N>2 (в прототипе только четное N). По сравнению с аналогом, для которого в семиэлементной решетке необходимо выполнить 32400·7=226800 итераций наведения антенн по азимуту и углу места (на основе тригонометрических преобразований) с дискретностью 1°, в предлагаемом решении достаточно провести 47·2=94 менее трудоемких, не связанных с тригонометрическими преобразованиями, операций оценки набегов фаз. Таким образом, число операций по сравнению с аналогом сокращается более чем в 2000 раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОПЕЛЕНГАТОР ДЛЯ ОПРЕДЕЛЕНИЯ ДВУХМЕРНОГО ПЕЛЕНГА | 2004 |
|
RU2276381C1 |
| СПОСОБ ДВУХМЕРНОГО ПЕЛЕНГОВАНИЯ ВОЗДУШНОГО ОБЪЕКТА | 2013 |
|
RU2535174C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДВУХМЕРНОГО ПЕЛЕНГА | 2005 |
|
RU2288481C2 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА | 2003 |
|
RU2263926C2 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ВОЗДУШНОГО ОБЪЕКТА | 2014 |
|
RU2567850C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2434239C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И МНОГОКАНАЛЬНЫЙ ПЕЛЕНГАТОР | 2002 |
|
RU2258241C2 |
| СПОСОБ ДВУХМЕРНОГО ПЕЛЕНГОВАНИЯ | 2018 |
|
RU2711341C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА РАДИОСИГНАЛА | 2021 |
|
RU2787952C1 |
| СПОСОБ ОДНОПУНКТНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА КОРОТКОВОЛНОВОГО ИЗЛУЧЕНИЯ | 2012 |
|
RU2523650C2 |




Изобретение относится к радиотехнике, в частности к радиопеленгации, и может быть использовано в системах определения местоположения источников радиоизлучения. Техническим результатом является расширение области применения за счет увеличения допустимого значения верхней частоты пеленгуемых сигналов. Способ пеленгования источника радиосигнала заключается в приеме сигнала с помощью ненаправленных антенн, образующих кольцевую эквидистантную решетку, и измерение разности фаз между сигналами, принятыми антеннами, при этом измеряют две группы разностей фаз между сигналами в двух группах антенн, векторы, соединяющие пары антенн, в которых коллинеарны, а по совокупности разностей фаз в группах методом многошкальных измерений, с учетом различий взаимных удалений антенн, оценивают однозначные на расстоянии диаметра решетки набеги фаз сигнала и определяют азимут и угол места по соответствующим формулам. 5 ил.

Способ пеленгования источника радиосигнала, заключающийся в приеме сигнала с помощью ненаправленных антенн, образующих кольцевую эквидистантную решетку, и измерении разности фаз между сигналами, принятыми антеннами, отличающийся тем, что измеряют две группы разностей фаз между сигналами в двух группах антенн, векторы, соединяющие пары антенн, в которых коллинеарны, а по совокупности разностей фаз в группах методом многошкальных измерений, с учетом различий взаимных удалений антенн, оценивают однозначные на расстоянии диаметра решетки набеги фаз сигнала и определяют азимут и угол места по формулам


где 

V, U - набеги фаз сигнала в первой и второй группе,
γ1, γ2 - углы поворота векторов, соединяющих пары антенн первой и второй группы, относительно опорного направления,
R - радиус решетки,
λ - длина волны излучения.
| МЕЗИН В.К., Автоматические радиопеленгаторы, М., “Советское радио”, 1969, с.105-110 | |||
| СПОСОБ ИЗМЕРЕНИЯ НАПРЯЖЕННОСТИ ЭЛЕКТРОМАГНИТНОГО ПОЛЯ РАДИОСИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2184980C1 |
| СПОСОБ ОДНОЗНАЧНОГО ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА | 1997 |
|
RU2124215C1 |
| СПОСОБ ОДНОЗНАЧНОГО ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2185636C1 |
| ТЯЖЕЛЫЙ КОПИРОВАЛЬНО-ФРЕЗЕРНЫЙ СТАНОК | 0 |
|
SU137745A1 |
| СПОСОБ ПОЛУЧЕНИЯ СОСТАВА ДЛЯ ЖИРОВАНИЯ КОЖИ И МЕХА | 1995 |
|
RU2076152C1 |
| ЕР 0339242 А, 02.11.1989 | |||
| US 4639733 А, 27.01.1987. | |||

