Изобретение относится к радиотехнике и может быть использовано в многоканальных моноимпульсных обнаружителях-пеленгаторах систем радиомониторинга, размещаемых в том числе на беспилотных летательных аппаратах, для решения задач двухмерного моноимпульсного пеленгования источников радиоизлучения по азимуту и углу места, а также при определении местоположения наземных объектов по радиоизлучениям их передатчиков.
В настоящее время задача снижения массогабаритных характеристик обнаружителей-пеленгаторов (ОП) имеет особую практическую значимость, в частности, при размещении ОП в качестве целевой нагрузки на беспилотных летательных аппаратах. При этом для пеленгования наземных источников радиоизлучения (ИРИ) необходимо обеспечить прием радиоволн в общем случае с ненулевым углом места направления прихода, зависящего как от взаимного расположения ИРИ и антенной системы (АС), а также углов пространственной ориентации носителя. Это определяет необходимость разработки АС ОП, конфигурация которой позволяет обеспечить требуемые показатели точности и достоверности пеленгования в азимутально-угломестном секторе приема.
На практике широкое распространение получили ОП с плоской антенной решеткой, в частности, эквидистантной кольцевой антенной решеткой (ЭКАР), элементы которой расположены в одной плоскости на одинаковом расстоянии от центра решетки с эквидистантным угловым разносом.
Известен способ двухмерного пеленгования источников радиоизлучения, представленный в [Козьмин В.А, Рембовский Ю.А., Уфаев А.В., Уфаев В.А. Способ двухмерного пеленгования воздушного объекта. Патент РФ № 2535174 G01S 3/10], включающий прием сигналов передатчика объекта с помощью антенн, образующих кольцевую решетку, расположенную параллельно земной поверхности, и, по меньшей мере, двумя дополнительными антеннами, расположенными на центральной оси кольцевой решетки ортогонально ее плоскости, измерение по принятым сигналам азимута объекта, преобразование принятых сигналов в угловой спектр по углам места прямого и отраженного от земной поверхности луча в направлении измеренного азимута объекта, после чего угловой спектр преобразуют в угловой спектр второго порядка, а угол места объекта определяют из однопараметрической максимизации углового спектра второго порядка, который получают путем учета как прямого, так и отраженного от земной поверхности луча, а также количества используемых антенн, их комплексных диаграмм направленности и комплексных амплитуд принятых антеннами сигналов.
Данный способ по технической сущности в части структуры применяемой антенной системы – объемной антенной решетки – является близким к предлагаемому. В способе-аналоге достигается повышение потенциальной точности и предельной чувствительности измерения направления на ИРИ в азимутально-угломестной плоскости. Применительно к технической сущности предлагаемого способа, недостатком указанного способа является то, что этот способ основан на увеличении (по сравнению со случаем использования плоской ЭКАР), по меньшей мере, на два количества антенных элементов АС ОП. В случае моноимпульсного приема, для реализации этого способа необходимо увеличение количества радиоприемных каналов, что приведет к увеличению массогабаритных характеристик ОП. Соответствующее повышение вычислительных ресурсов аппаратуры, энергопотребления и массы ОП в ряде случаев может являться технически неоправданным, а причем степень реализуемости такого ОП существенным образом ограничивается возможностями носителя по использованию ОП в качестве целевой нагрузки.
Этот недостаток существенным образом ограничивает область применимости указанного способа-аналога в современных (перспективных) многоканальных системах радиомониторинга, размещаемых в качестве целевой нагрузки на беспилотных летательных аппаратах, при решении задач двухмерного моноимпульсного пеленгования наземных ИРИ по азимуту и углу места, а также при решении задач определения местоположения наземных объектов по радиоизлучениям их передатчиков.
Кроме того, учет наличия (наряду с прямым лучом) второго луча, отраженного от земной поверхности, приходящего с одинакового с прямым лучом азимута, но зеркально симметричным значением угла места, не соответствует применительной к предлагаемому способу ситуации, когда ОП размещен над поверхностью земли, так как в этом случае имеет место наличие прямого луча, обусловленного излучением наземного ИРИ в направлении на АС ОП.
Наиболее близким аналогом по технической сущности к предлагаемому является способ определения двухмерного пеленга по патенту РФ № 2288481. G01S 5/04, принятый за прототип.
Способ-прототип включает следующие операции.
1 Прием радиосигналов с помощью центральной антенны и антенн, образующих N элементную кольцевую решетку при общем числе антенн не менее трех.
2 Синхронное измерение комплексных амплитуд принятых радиосигналов.
3 Определение узлов сетки наведения решетки в системе координат нормированных набегов фаз радиосигналов между диаметрально противоположными точками решетки на линии, параллельной опорному направлению и перпендикулярной ему, путем равномерного квантования нормированных набегов фаз и определения всех пар их значений, сумма квадратов которых не превышает единицы.
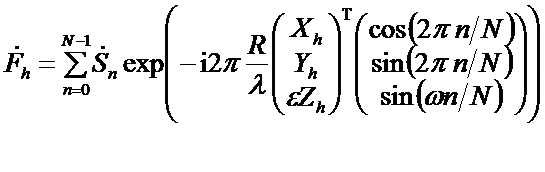
4 Преобразование комплексных амплитуд принятых радиосигналов в узлах сетки наведения решетки в угловой спектр по формуле

где 

n - номер антенны, равный N - для центральной антенны и 0, 1, ..., (N-1) - для других антенн;

i - мнимая единица;

R - радиус решетки.
5 Определение значения азимута и угла места двухмерного пеленга как фазу вектора и арккосинус модуля вектора с ортогональными составляющими, равными координатам максимума модуля углового спектра.
В способе-прототипе рассматривается плоская ЭКАР, ввиду свойств симметрии структуры которой, ОП с ЭКАР обеспечивают равноточные измерения направления прихода радиоволны в круговом азимутальном секторе. В частности, при отсутствии взаимных влияний в ЭКАР, флуктуационные составляющие ошибок оценивания азимута и угла места не коррелированы и инвариантны к значению азимута ввиду симметричной структуры антенной решетки. Однако, при стремлении угла места к нулю, средняя квадратическая ошибка (СКО) пеленгования по углу места неограниченно возрастает, что обусловлено уменьшением апертуры ЭКАР в проекции на плоскость волнового фронта радиоволны, что является недостатком способа-прототипа.
С целью повышения точности пеленгования и разрешающей способности ОП по углу места необходимо обеспечить пространственный разнос антенных элементов вдоль вертикальной оси, что соответствует объемной конфигурации антенной решетки. В ряде случаев в качестве объемной АС рассматривают две ЭКАР, разнесенные в пространстве вдоль вертикальной оси. В случае моноимпульсного приема, структура такой АС предполагает увеличение (по сравнению со случаем плоской ЭКАР) количества радиоприемных каналов и массогабаритных характеристик ОП. Соответствующее повышение вычислительных ресурсов аппаратуры, энергопотребления и массы ОП в ряде случаев может являться технически неоправданным, причем степень реализуемости такого ОП существенным образом ограничивается возможностями носителя по использованию ОП в качестве целевой нагрузки.
Задача – улучшение технико-эксплуатационных характеристик многоканальных моноимпульсных обнаружителей-пеленгаторов систем радиомониторинга, размещаемых, в том числе на беспилотных летательных аппаратах, для двухмерного моноимпульсного пеленгования источников радиоизлучения по азимуту и углу места, а также при определении местоположения наземных объектов по радиоизлучениям их передатчиков.
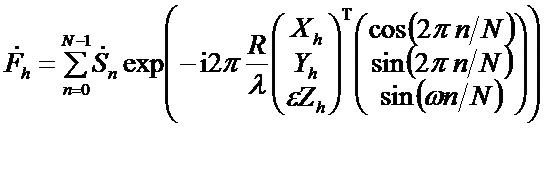
Для решения поставленной задачи, в способе двухмерного моноимпульсного пеленгования источников радиоизлучений, включающем прием радиосигналов с помощью N-элементной антенной решетки, синхронное измерение комплексных амплитуд принятых радиосигналов; определение узлов сетки наведения решетки в системе координат нормированных набегов фаз радиосигналов между диаметрально противоположными точками решетки на линии, параллельной опорному направлению и перпендикулярной ему, путем равномерного квантования нормированных набегов фаз и определения всех пар их значений, сумма квадратов которых не превышает единицы; преобразование комплексных амплитуд принятых радиосигналов в узлах сетки наведения решетки в угловой спектр; определение значения азимута и угла места двухмерного пеленга как фазу вектора и арккосинус модуля вектора с ортогональными составляющими, равными координатам максимума модуля углового спектра, согласно изобретению, прием радиосигналов осуществляют с помощью антенн, образующих N-элементную винтовую антенную решетку при общем числе антенн не менее трех; преобразование комплексных амплитуд принятых радиосигналов в узлах сетки наведения решетки в угловой спектр выполняют по формуле
где 












n - номер антенны
i - мнимая единица;

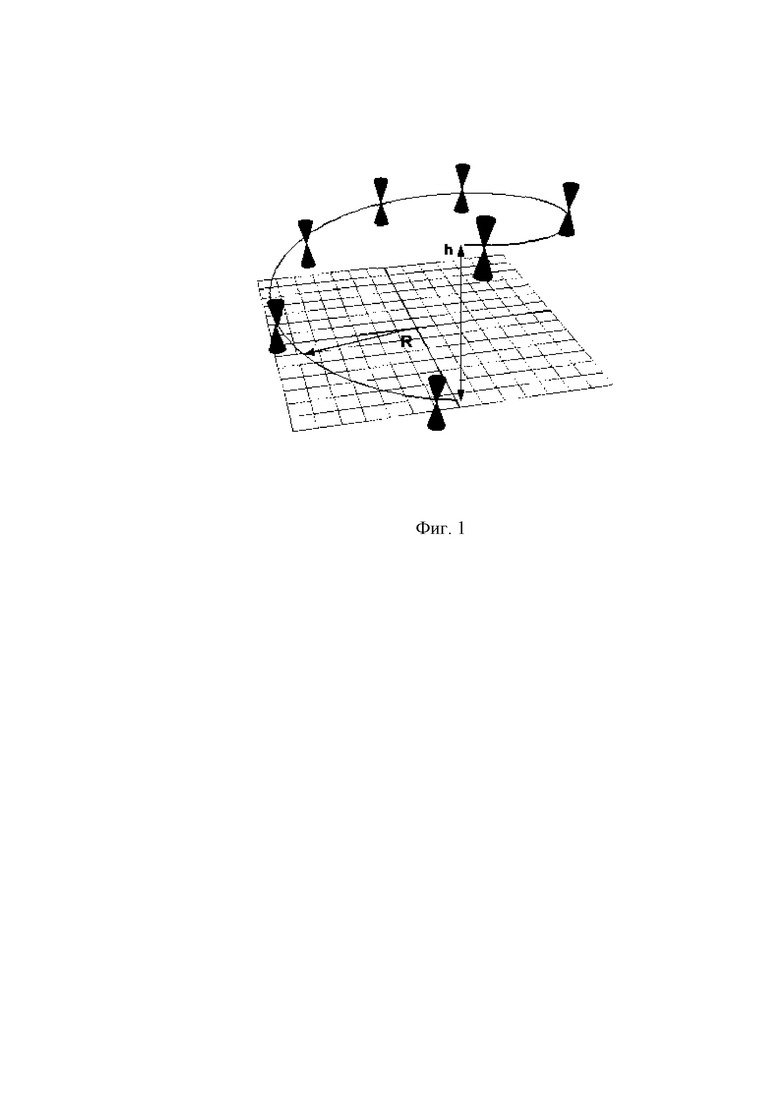
Поставленная задача решается следующим образом. В качестве одной из возможных конфигураций объемной АС рассмотрим эквидистантную винтовую антенную решетку (ЭВАР), см. фиг. 1. Соседние антенные элементы ЭВАР расположены на одинаковом расстоянии вдоль винтовой линии – кривой в трехмерном пространстве, расположенной на круглом цилиндре. По сравнению с конфигурацией АС вида разнесенных по высоте двух плоских ЭКАР, данная конфигурация обладает следующими преимуществами.
Во-первых, конфигурация N-элементной ЭВАР может быть получена из N-элементной ЭКАР путем вертикального перемещения точек расположения антенных элементов вдоль поверхности цилиндра. Данная трансформация обеспечивает сохранение расстояния между элементами вдоль горизонтальной плоскости, т.к. проекция ЭВАР на эту плоскость совпадает с соответствующей ей ЭКАР. Это обеспечивает неизменную по сравнению со случаем ЭКАР точность пеленгования в азимутальной плоскости.
Во-вторых, в отличие от способа-прототипа, данная трансформация конфигурации АС не предполагает увеличения количества антенных элементов, что при обеспечении моноимпульсного приема радиосигналов не приводит к увеличению количества радиоприемных каналов ОП.
В-третьих, варьируя отношением шага витка (h) винтовой линии к радиусу (R) окружности образующего цилиндра, становится возможным существенное повышение точности и разрешающей способности пеленгования ИРИ при ненулевых углах места.
В качестве примера на фиг. 1 приведено изображение модели семиэлементной ЭВАР из биконических симметричных вибраторов.
При соблюдении указанных условий угловой спектр второго порядка, получаемый по совокупности сигналов всех N антенн ЭВАР, имеет максимум в окрестности истинного двухмерного пеленга со снижением погрешности его измерений. Существенным, как и в способе-прототипе, является также осевая симметрия антенной системы. Это позволяет определять азимут и угол места одним из известных способов по принятым сигналам с выходов антенной системы путем максимизации двумерного углового спектра второго порядка.
Предлагаемый способ предполагает выполнение следующих процедур:
1 Прием радиосигналов, в отличие от п.1 способа прототипа, с помощью антенн, образующих N–элементную винтовую антенную решетку при общем числе антенн не менее трех.
2 Синхронное измерение комплексных амплитуд принятых радиосигналов.
3 Определение узлов сетки наведения решетки в системе координат нормированных набегов фаз радиосигналов между диаметрально противоположными точками решетки на линии, параллельной опорному направлению и перпендикулярной ему, путем равномерного квантования нормированных набегов фаз и определения всех пар их значений, сумма квадратов которых не превышает единицы.
4 Преобразование комплексных амплитуд принятых радиосигналов в узлах сетки наведения решетки в угловой спектр, в отличие от п.4 способа-прототипа, по следующей формуле
где
n - номер антенны
i - мнимая единица;
5 Определение значения азимута и угла места двухмерного пеленга как фазу вектора и арккосинус модуля вектора с ортогональными составляющими, равными координатам максимума модуля углового спектра.
Предлагаемый способ двухмерного моноимпульсного пеленгования источников радиоизлучений лишен перечисленных выше недостатков способа-прототипа, что обусловлено осуществлением приема радиосигналов с помощью объемной винтовой антенной решетки.
Технический результат способа обеспечивается тем, что в результате пространственного разноса антенных элементов вдоль вертикальной оси АР по сравнению с плоской ЭКАР данная ЭВАР обладает лучшей разрешающей способностью и точностью пеленгования по углу места.
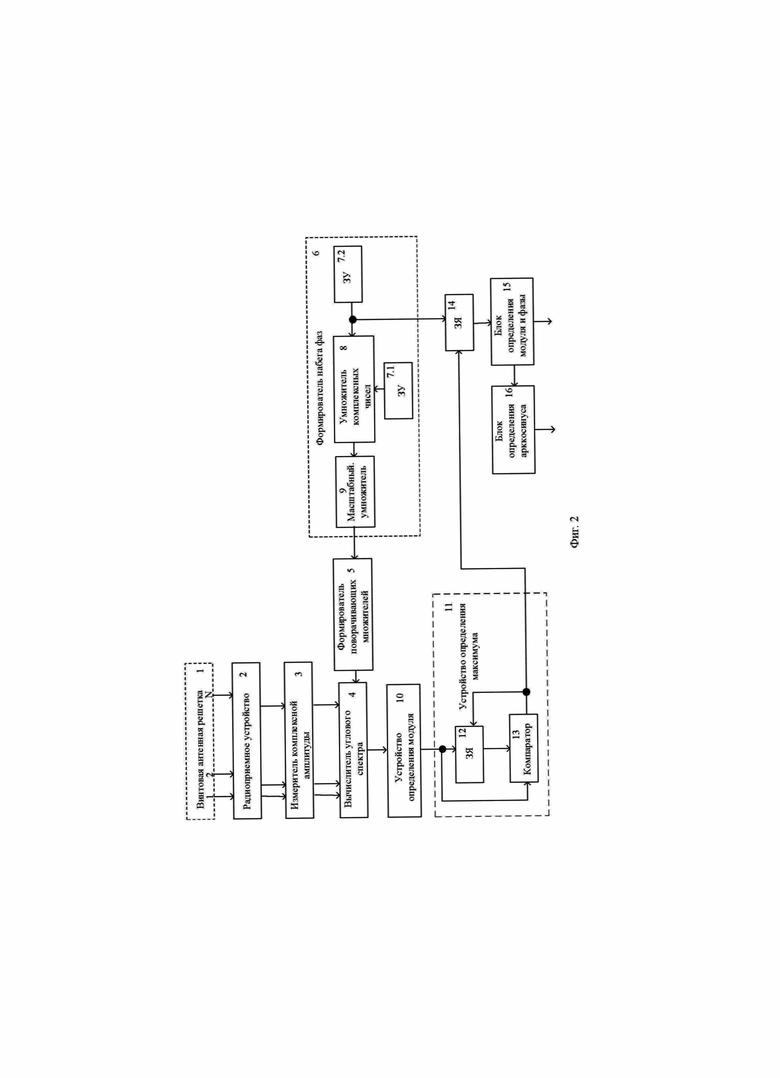
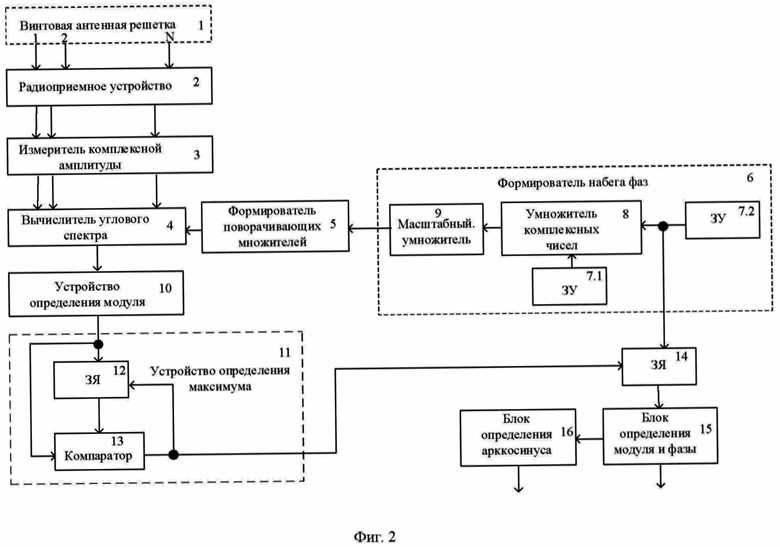
На фиг. 2 приведена структурная схема устройства, реализующего предлагаемый способ, где обозначено:
1 – винтовая антенная решетка (антенная система);
2 – радиоприемное устройство;
3 – измеритель комплексной амплитуды;
4 – вычислитель углового спектра;
5 – формирователь поворачивающих множителей;
6 – формирователь набега фаз;
7.1, 7.2 – первое и второе запоминающие устройства;
8 – умножитель комплексных чисел;
9 – масштабный умножитель;
10 – устройство определения модуля;
11 – устройство определения максимума;
12 – запоминающая ячейка максимума (ЗЯМ);
13 – компаратор;
14 – запоминающая ячейка координат (ЗАК);
15 – блок определения модуля и фазы;
16 – блок определения арккосинуса.
Устройство содержит антенную систему 1, включающую N антенн, каждая из которых подсоединена к соответствующему входу радиоприемного устройства 2, N выходов которого соединены с соответствующими N входами измерителя комплексной амплитуды 3, N выходов которого соединены с соответствующими входами вычислителя углового спектра 4, выход которого через устройство определения модуля подключен к входу устройства определения максимума 11. Устройство определения максимума содержит запоминающую ячейку максимума 12 и компаратор 13, первые входы которых соединены и являются входом устройства 11. При этом выход запоминающей ячейки максимума 12 подсоединен ко второму входу компаратора 13, выход которого соединен со вторым входом запоминающей ячейки максимума 12 и является выходом устройства определения максимума 11. Формирователь набега фаз 6 содержит первое 7.1 и второе 7.2 запоминающие устройства, выходы которых соединены с соответствующими входами умножителя комплексных чисел 8, выход которого соединен с входом масштабного умножителя 9, выход которого является первым выходом формирователя 6 и через формирователь поворачивающих множителей 5 соединен с соответствующим входом вычислителя углового спектра 4. Кроме того, выход второго запоминающего устройства 7.2 является вторым выходом формирователя 6 и соединен с одним входом запоминающей ячейки координат 14, другой вход которого подключен к выходу устройства определения максимума 11. Выход запоминающей ячейки координат 14 через блок определения модуля и фазы 15 соединен с входом блока определения арккосинуса 16. Второй выход блока определения модуля и фазы 15 является первым выходом всего устройства (азимутальный пеленг), вторым выходом которого является выход блока определения арккосинуса 16 (угломестный пеленг).
Антенная система 1 включает N антенн, образующих эквидистантную винтовую решетку при общем числе антенн не менее трех. Антенны идентичные, всенаправленные (по крайней мере, в горизонтальной плоскости), типа вертикальный несимметричный вибратор, установлены над поверхностью Земли.
Одна из антенн решетки с номером n=0 ориентирована на север, нумерация других антенн решетки - по часовой стрелке в проекции на горизонтальной плоскости в порядке возрастания порядковых номеров. Радиус решетки R.
Радиоприемное устройство 2 и измеритель комплексной амплитуды 3 – многоканальные, с числом каналов N, равным числу антенн. Измеритель 3 обеспечивает синхронное измерение комплексных амплитуд радиосигналов на выходе антенн и может быть выполнен с применением цифровой элементной базы, например, по схеме рис.3.14, приведенной в [Побережский Е.С. Цифровые радиоприемные устройства. - М.: Радио и связь, 1987, с.67-69].
Вычислитель углового спектра 4 реализует функцию типа сверка:
здесь 
Формирователь поворачивающих множителей 5 реализует функцию преобразования вида

здесь х - сигнал на входе.
Запоминающие устройства предназначены для хранения: 7.1 - комплексных величин вида
а 7.2 значений координат узлов наведения решетки в виде

где h - текущий номер узла.
Информацию записывают до начала работы устройства. Объем запоминающего устройства 7.1 равен N, а запоминающего устройства 7.2 не превышает
где 
Запоминающие ячейки 12, 14 обеспечивают хранение и запись одного числа (в ячейке 14 - комплексного). Запись информации производится по сигналам с выхода компаратора. Исходное состояние запоминающей ячейки 12 - нулевое.
Блок определения модуля и фазы 15 и блок определения арккосинуса 16 реализуют функции преобразования вектора х (комплексного числа) соответственно

Эти блоки могут быть выполнены по способу Волдера [Бойков В.Д., Смолов В.Б. Аппаратурная реализация элементарных функций в ЦВМ. Л., ЛГУ, 1975, с.18-22].
Принцип действия устройства состоит в следующем.
Перед началом работы в запоминающее устройство 7.2 заносят возможные значения нормированных (на параметр разноса решетки

где R - радиус решетки,

набегов фаз между диаметрально противоположными точками решетки, расположенными на линии, параллельной опорному направлению (север - юг) и перпендикулярной ему (восток - запад)
где 
Эти значения, лежащие в пределах диапазона [-1,+1], предварительно равномерно квантуют и определяют пары квантованных чисел, сумма квадратов которых не превышает единицы. Результаты квантования используют как координаты узлов сетки наведения решетки 


Результаты сравнения пеленгационных характеристик ЭВАР и соответствующей ей ЭКАР.
Для анализа достигаемого технического результата – обеспечиваемого за счет выбора конфигурации антенной системы повышения точности моноимпульсного пеленгования и разрешающей способности ОП по углу места при незначительном увеличении массогабаритных характеристик ОП, рассмотрим в качестве примера пеленгационные характеристики ОП с ЭВАР, полученной из 7-ЭКАР.
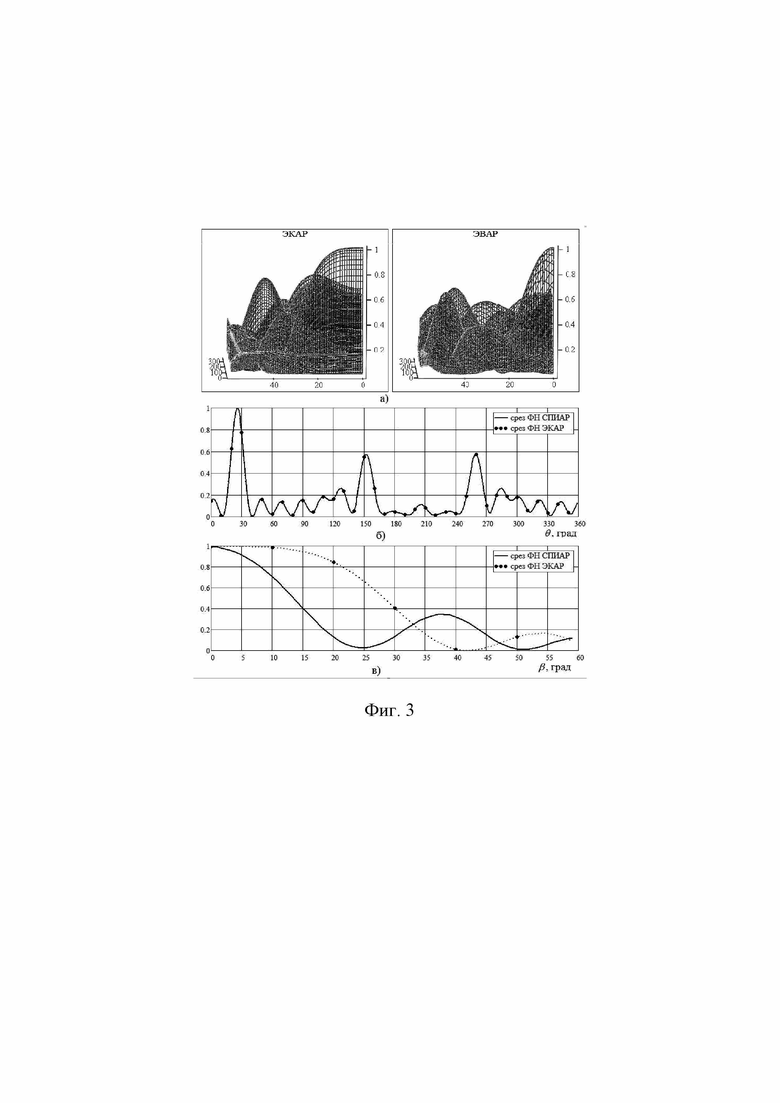
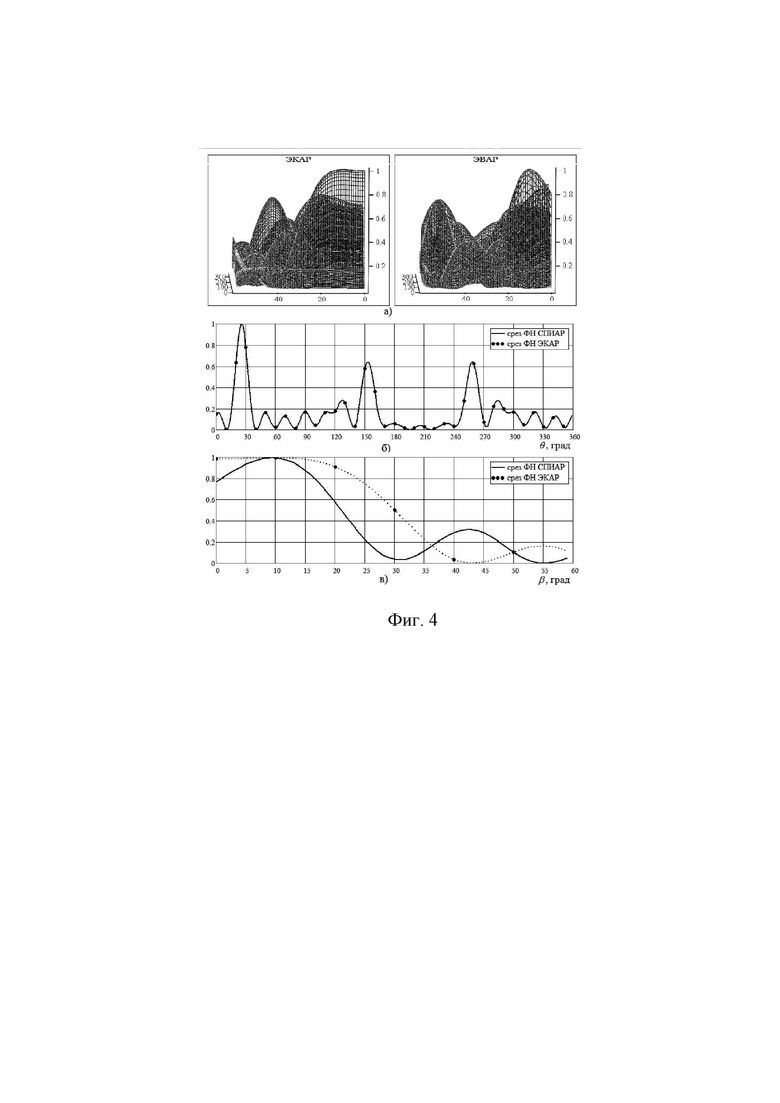
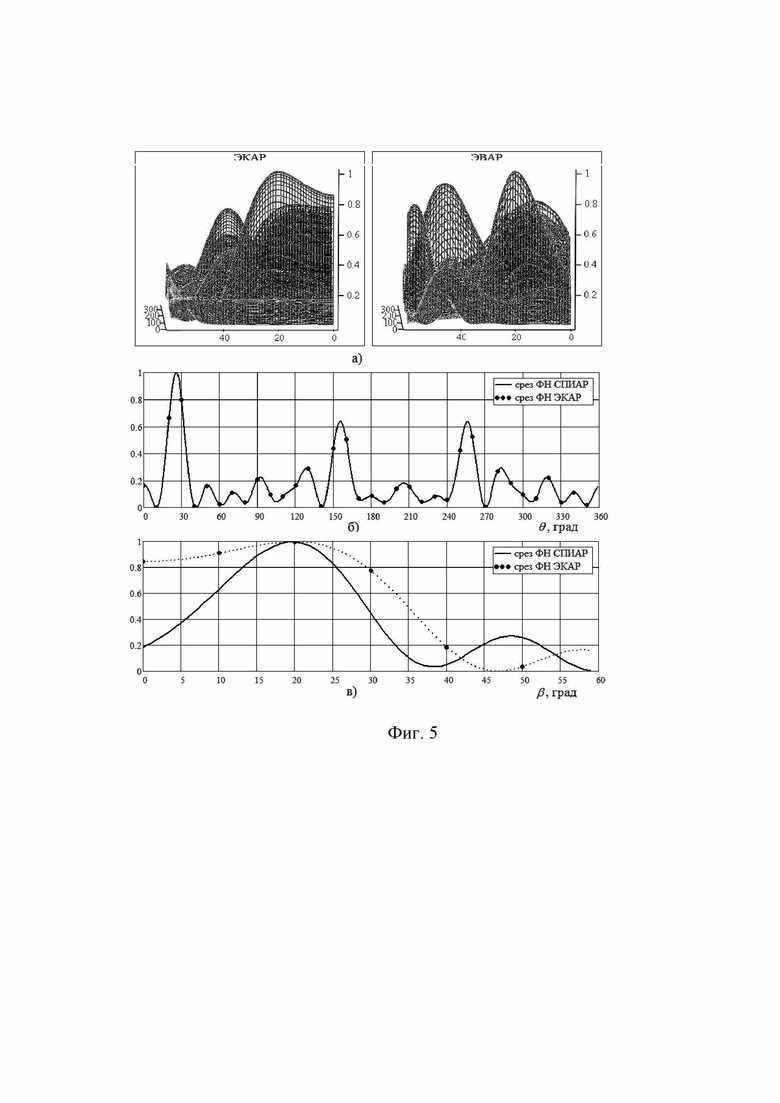
На фиг. 3 – 5 представлены функции неопределенности (ФН) (а) по азимуту и углу места для 7-ЭКАР и 7-ЭВАР и их угломестные (б) и азимутальные (в) срезы вдоль истинного значения направления прихода в случае прихода радиоволны с азимута 360/14


В результате пространственного разноса антенных элементов вдоль вертикальной оси АР по сравнению с плоской 7-ЭКАР данная АР обладает лучшей разрешающей способностью и точностью пеленгования по углу места. Для плоской ЭКАР определяющим параметром функции неопределенности, характеризующим соотношение параметров конфигурации АС и длины пеленгуемой волны, является отношение 




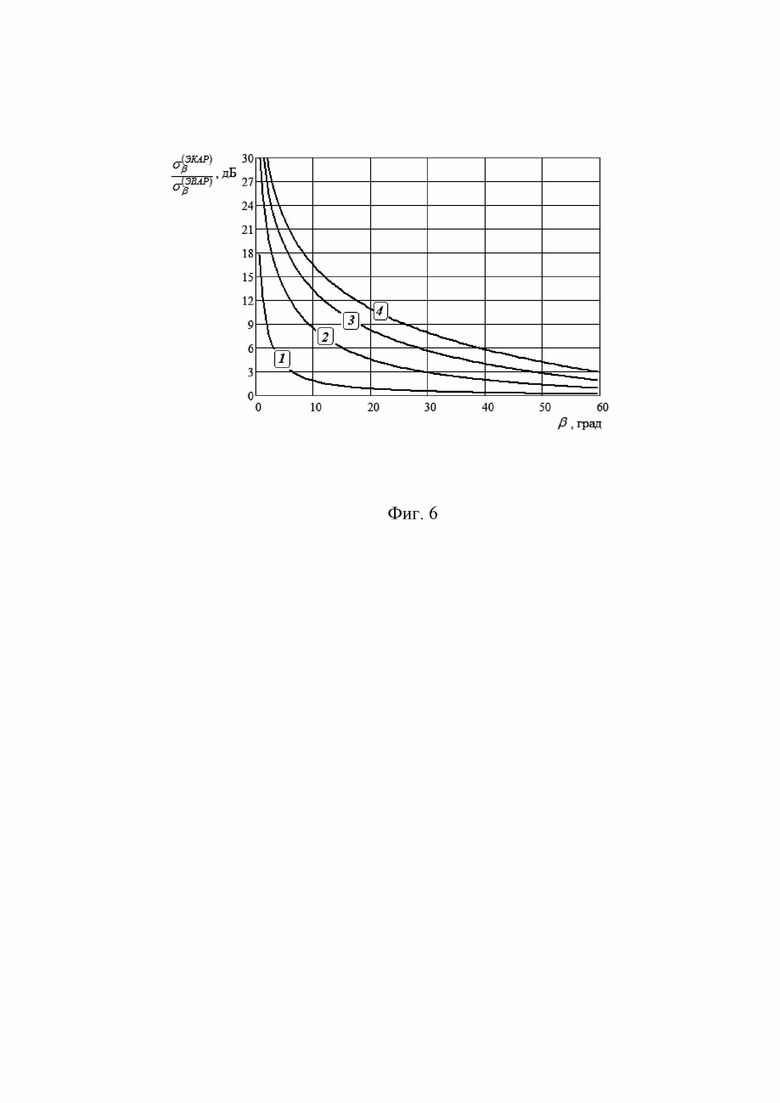
На фиг.6 представлена зависимость от угла места, 





Видно, что при фиксированном угле места с увеличением шага винтовой линии выигрыш в точности пеленгования за счет использования ЭВАР повышается, что обусловлено ростом кривизны главного лепестка азимутально-угломестной функции неопределенности. В частности, уже при шаге витка ЭВАР равном радиусу ЭКАР при углах места менее 10 град. выигрыш в СКО пеленгования составляет не менее 13 дБ. С ростом угла места прихода радиоволны различие в потенциальных характеристиках ЭВАР и ЭКАР уменьшаются.
Варьируя величиной отношения шага винтовой линии к радиусу образующего цилиндра, 

Предлагаемый способ лишен указанных недостатков способа-прототипа и обеспечивает повышение точности пеленгования и разрешающей способности моноимпульсного ОП по углу места при незначительном увеличении массогабаритных характеристик ОП, в значительной степени определяющихся количеством радиоприемных каналов и антенных элементов АС.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ моноимпульсного пеленгования источников поляризованных радиосигналов | 2024 |
|
RU2834965C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДВУХМЕРНОГО ПЕЛЕНГА | 2005 |
|
RU2288481C2 |
| Способ повышения точности и достоверности пеленгования при накоплении спектральных компонент сигналов источников радиоизлучения | 2019 |
|
RU2696094C1 |
| Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения с летно-подъемного средства | 2020 |
|
RU2732505C1 |
| Способ повышения точности пеленгования источников радиоизлучения обнаружителем-пеленгатором с многошкальной антенной системой | 2019 |
|
RU2713235C1 |
| Способ адаптивного пространственно-многоканального обнаружения и пеленгования двух частотно-неразделимых источников радиоизлучения | 2020 |
|
RU2732504C1 |
| Способ контроля излучения нескольких источников частотно-неразделимых сигналов | 2019 |
|
RU2704027C1 |
| Способ контроля излучения источника в заданном направлении | 2019 |
|
RU2713514C1 |
| СПОСОБ ДВУХМЕРНОГО ПЕЛЕНГОВАНИЯ ВОЗДУШНОГО ОБЪЕКТА | 2013 |
|
RU2535174C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2005 |
|
RU2289146C9 |
Изобретение относится к радиотехнике и может быть использовано в многоканальных моноимпульсных обнаружителях-пеленгаторах систем радиомониторинга, размещаемых, в том числе, на беспилотных летательных аппаратах, для двухмерного моноимпульсного пеленгования источников радиоизлучения по азимуту и углу места, а также при определении местоположения наземных объектов по радиоизлучениям их передатчиков. Достигаемый технический результат – повышение точности пеленгования и разрешающей способности моноимпульсного ОП по углу места при незначительном увеличении массогабаритных характеристик ОП, обеспечивается за счет выбора конфигурации антенной системы. Указанный результат достигается за счет того, что в способе прием радиосигналов осуществляют с помощью антенн, образующих N-элементную винтовую антенную решетку при общем числе антенн не менее трех; преобразование комплексных амплитуд принятых радиосигналов в узлах сетки наведения решетки в угловой спектр выполняют по формуле
где 











Способ двухмерного моноимпульсного пеленгования источников радиоизлучений, включающий прием радиосигналов с помощью N-элементной антенной решетки, синхронное измерение комплексных амплитуд принятых радиосигналов; определение узлов сетки наведения решетки в системе координат нормированных набегов фаз радиосигналов между диаметрально противоположными точками решетки на линии, параллельной опорному направлению и перпендикулярной ему, путем равномерного квантования нормированных набегов фаз и определения всех пар их значений, сумма квадратов которых не превышает единицы; преобразование комплексных амплитуд принятых радиосигналов в узлах сетки наведения решетки в угловой спектр; определение значения азимута и угла места двухмерного пеленга как фазу вектора и арккосинус модуля вектора с ортогональными составляющими, равными координатам максимума модуля углового спектра, отличающийся тем, что прием радиосигналов осуществляют с помощью антенн, образующих N-элементную винтовую антенную решетку при общем числе антенн не менее трех; преобразование комплексных амплитуд принятых радиосигналов в узлах сетки наведения решетки в угловой спектр выполняют по формуле
где 













n - номер антенны;
i - мнимая единица;

| СПОСОБ ОПРЕДЕЛЕНИЯ ДВУХМЕРНОГО ПЕЛЕНГА | 2005 |
|
RU2288481C2 |
| СПОСОБ ДВУХМЕРНОГО ПЕЛЕНГОВАНИЯ ВОЗДУШНОГО ОБЪЕКТА | 2013 |
|
RU2535174C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПРИЕМНЫХ ДИАГРАММ НАПРАВЛЕННОСТИ МОНОИМПУЛЬСНОЙ АНТЕННОЙ СИСТЕМЫ И МОНОИМПУЛЬСНАЯ АНТЕННАЯ СИСТЕМА | 2006 |
|
RU2316860C1 |
| Моноимпульсный пеленгатор с комбинированным антенным устройством | 2015 |
|
RU2624008C2 |
| US 9146309 B2, 29.09.2015 | |||
| EP 1012623 A1, 28.06.2000 | |||
| WO 1997022890 A1, 26.06.1997. | |||

