Изобретение относится к автомобилю, содержащему приводной двигатель, устройство передачи крутящего момента с первым исполнительным устройством, коробку передач с ведущим и ведомым валами и вторым исполнительным устройством, причем коробка передач содержит образующие передаточные ступени блоки шестерен, образованные неподвижно соединенной с валом шестерней передачи и установленным с возможностью соединения с валом колесом-кареткой, и устройство управления, причем первое и второе исполнительные устройства выполнены с возможностью автоматического управления посредством устройства управления, и к способу эксплуатации автомобиля.
У подобных автомобилей включение передаточных ступеней осуществляется за счет того, что колесо-каретку соединяют посредством муфты переключения с несущим его валом; разность частот вращения соединяемых между собой деталей должна равняться при этом, по меньшей мере, приблизительно нулю. Создание, по меньшей мере, приблизительного равенства частот вращения называется процессом синхронизации.
У одного вида коробок передач используют, например, соединенные с соответствующим колесом-кареткой синхронизаторы, которые во время процесса переключения создают, по меньшей мере, приблизительное равенство частот вращения соединяемых между собой деталей и обеспечивают полное включение муфты переключения лишь тогда, когда равенство частот вращения достигнуто, по меньшей мере, приблизительно. В начале процесса переключения обе соединяемые между собой детали вступают в контакт сначала через поверхность трения и происходит зависимый от усилия включения и коэффициента трения подхват. Синхронизатор может содержать также блокировочный механизм, что препятствует дальнейшему включению за счет усилия подхвата. Если равенство частот вращения, по меньшей мере, приблизительно создано, а усилие подхвата, тем самым, упало, по меньшей мере, приблизительно до нуля, блокировочный механизм размыкается и процесс переключения может быть закончен за счет геометрического замыкания между соединяемыми между собой деталями. Позиция включения, при которой дальнейшее включение при недостаточной синхронизации частот вращения блокируется, называется позицией синхронизации. У другого вида коробок передач синхронизатор отсутствует, тогда иным образом обеспечивается создание геометрического замыкания лишь при, по меньшей мере, приблизительном равенстве частот вращения, например посредством соответствующего управления приводным двигателем или тормозами валов, а для определения разности частот вращения используют подходящие датчики.
В частности, у автоматических ступенчатых коробок передач, у которых смена передаточных ступеней осуществляется автоматически посредством устройства управления за счет того, что приведение в действие самопроизвольно инициируется устройством управления на основе нескольких входных величин, управление процессом синхронизации представляет собой весьма комплексное требование. Например, во время синхронизированного процесса включения в определенной точке, т.е. на пороге синхронизации, когда муфта скольжения из-за действия блокировочного механизма останавливается, в тот момент, когда остановка достигнута, должно быть установлено заданное усилие, т.е. синхронизирующее усилие. Это приносит с собой ту проблему, что позиция порога синхронизации, должно быть, достаточно точно известна устройству управления и/или что должен быть предоставлен в распоряжение независимый от точной позиции порога синхронизации вид установки синхронизирующего усилия. Для достижения короткого времени переключения для оптимального переключения решающим далее является то, как создается или устанавливается синхронизирующее усилие, так что влияющие параметры учитываются достаточно точно.
Упругое устройство переключения стало известно само по себе, например, из европейского патента ЕР 579532 В1. В нем раскрыто механическое вспомогательное устройство для включения передач переключаемой посредством тросов или рычажного механизма коробки передач, в которой последовательность переключения передается валом управления, приводимым во вращение тросом или рычажным механизмом, причем механическое соединение между тросом или рычажным механизмом для управления процессом переключения и валом состоит из двух сочлененных частей, перемещением которых по отношению друг к другу упругим образом управляет пружина, поглощающая энергию за счет того, что она на фазе синхронизации сжимается, а по окончании поглощения снова отдает поглощенную энергию. Описанное вспомогательное устройство должно устранить определенные недостатки обычных устройств переключения передач - воспринимаемое слишком длительным время синхронизации или свободный путь, значительное передающее усилие, возникающее в виде слишком медленной синхронизации, и воспринимаемый как недостаток шум при зацеплении зубьев. Описанное механическое вспомогательное устройство касается коробок передач с ручным управлением.
В другом патенте ЕР 695892 В1 описана другая система переключения передач, по меньшей мере, с одним исполнительным органом и приводимыми им в действие муфтами скольжения, причем соответствующий соединительный механизм содержит пружину. С помощью раскрытой системы переключения передач предотвращается недопустимо высокий ток у выполненных в виде электродвигателя приводных органов, когда переключение нельзя осуществить сразу. Раскрытая система переключения передач касается автоматической ступенчатой коробки передач.
Описанное в ЕР 579532 В1 упругое устройство переключения выполняет функцию аккумулятора энергии за счет того, что оно временно сжимается, а затем снова расширяется. Таким образом, муфта скольжения получает от пружины импульс, который больше импульса, который мог бы быть передан ей за счет быстрого перемещения рычага переключения передач водителем. Результирующий импульс, следовательно, всегда зависит от скорости или усилия перемещения рычага переключения передач водителем, причем точное установление требуемого муфтой скольжения заданного усилия остается более или менее предоставленным случаю.
Также раскрытое в ЕР 695892 В1 упругое устройство переключения в процессе переключения сжимается, а затем снова отдает накопленную им энергию. Данное упругое устройство переключения обеспечивает перемещение муфты скольжения с временной задержкой относительно движения исполнительного органа в соответствии с процессом синхронизации. Упругое устройство переключения защищает приводной электродвигатель от перегрузки, однако не происходит оказания влияния посредством скорости включения с учетом упругого устройства переключения в отношении нужного заданного усилия.
Система между муфтой скольжения и приводным органом, содержащая соединительный механизм с его кинематическими и упругими свойствами, представляется, в частности, в автоматических коробках передач, весьма комплексной. В отношении синхронизированного включения передаточной ступени еще не найдено достаточно удовлетворительного решения, которое отвечало бы множеству требований, в частности в отношении скорости включения с учетом упругости механизма между приводом и муфтой скольжения.
Данное изобретение имеет задачу существенного улучшения процесса синхронизации у названного выше автомобиля, в частности улучшения хода процесса, так чтобы процесс переключения можно было осуществлять, в том числе, комфортабельнее, быстрее и без износа.
Далее ставится задача создания коробки передач, а также способа эксплуатации коробки передач, при котором синхронизированная смена передаточных ступеней существенно улучшилась бы, в частности, в отношении создания усилия на пороге синхронизации с учетом кинематических и упругих свойств механизма.
Эта задача решается согласно изобретению посредством названного выше автомобиля с коробкой передач, которая имеет признаки и/или этапы способа в соответствии с нижеследующим описанием с фигурами и пунктами формулы изобретения, которые позволяют достичь желаемого успеха, в частности, в данной комбинации, однако также сами по себе.
Так, для решения одного аспекта задачи у автомобиля, содержащего приводной двигатель, устройство передачи крутящего момента с первым исполнительным устройством, коробку передач с ведущим и ведомым валами и вторым исполнительным устройством, причем коробка передач содержит образующие передаточные ступени блоки шестерен, образованные неподвижно соединенной с валом шестерней и установленным с возможностью соединения с валом колесом-кареткой, и устройство управления, причем первое и второе исполнительные устройства выполнены с возможностью автоматического приведения в действие посредством устройства управления, в то время как в первом режиме эксплуатации приведение в действие инициируется самопроизвольно устройством управления на основе нескольких входных величин, а во втором режиме эксплуатации приведение в действие осуществляется водителем за счет ввода, причем соединение колеса-каретки, по меньшей мере, одной передаточной ступени с несущим его валом выполнено посредством концевого выходного элемента, такого как муфта скольжения, с синхронизатором, который, прикладывая синхронизирующее усилие во время включения, создает, по меньшей мере, приблизительное равенство частот вращения соединяемых элементов и обеспечивает полное включение только по завершении процесса синхронизации при, по меньшей мере, приблизительном равенстве частот вращения, причем позиция порога синхронизации, по меньшей мере, одной передаточной ступени сохранена в приданной устройству управления памяти, позиция порога синхронизации, по меньшей мере, одной передаточной ступени может быть адаптирована, причем адаптация порогов синхронизации осуществляется тогда, когда автомобиль стоит на месте, приводной двигатель работает, тормоз нажат, и имеется требование к адаптации позиции порога синхронизации.
Конечным выходным элементом в данном случае называется последний элемент, перемещаемый для того, чтобы установить передаточное отношение, т.е. который создает соединение между двумя средствами передачи усилия, например шестерня заднего хода, блок зубчатых колес, муфта скольжения, рабочий поршень гидросцепления.
Согласно одному весьма предпочтительному выполнению изобретения позиция порога синхронизации, по меньшей мере, одной передаточной ступени может быть адаптирована, с тем, чтобы несмотря на изменяющуюся во время работы позицию синхронизации гарантировать достаточно точное совпадение между фактической позицией и хранящейся в памяти позицией синхронизации. Целесообразно, если автомобиль для осуществления адаптации стоит на месте с заданного времени t, a приводной двигатель работает, по меньшей мере, приблизительно на холостых оборотах. Таким образом, адаптация порога синхронизации происходит при небольшой разности частот вращения соединяемых муфтой переключения деталей, автомобиль фиксирован от движения на основе момента, переданного на колеса в процессе адаптации, а частота вращения еще быстро вращающихся при случае валов уменьшена.
В коробке передач передаточные ступени включаются посредством второго исполнительного устройства, содержащего средства для выбора и для приведения в действие концевых исполнительных элементов, при этом адаптация позиции порогов синхронизации содержит следующие этапы: замыкание устройства передачи крутящего момента с помощью первого исполнительного устройства, приближение к позиции с помощью второго исполнительного устройства в непосредственной близости от положения, из которого может быть приведен в действие концевой выходной элемент передаточной ступени, позиция порога синхронизации которой должна быть адаптирована исходя из позиции, в которой обеспечивается приведение в действие концевого выходного механизма, так что концевой выходной элемент движется в направлении своего конечного положения, а также определение позиции порога синхронизации на основе блокировки движения включения концевого выходного элемента на пороге синхронизации из-за недостаточной синхронизации. Второе устройство срабатывания содержит два привода, причем один привод служит, например, приводом выбора муфты скольжения за счет того, что палец переключения перемещают с возможностью его приведения в соединение с вилкой переключения для приведения в действие муфты скольжения, в результате чего включается передаточная ступень, порог синхронизации которой должен быть адаптирован. Целесообразно палец переключения для осуществления процесса адаптации перемещают сначала в позицию в непосредственной близости от передаточной ступени, позиция порога синхронизации которой должна быть адаптирована, предпочтительным образом палец переключения приводят в соединение с нужной вилкой переключения. Второй привод второго устройства служит приводом переключения для перемещения пальца переключения с возможностью перемещения муфты скольжения, с которой он находится в соединении через вилку переключения, в результате чего происходит движение включения и выключения. Для адаптации порога синхронизации движение включения осуществляют исходя из позиции, из которой порог синхронизации надежно переходит, например, из нейтрального положения в позицию, обеспечивающую адаптацию порога синхронизации.
В данном случае под концевым выходным механизмом понимают механизм, содержащий концевой выходной элемент, причем механизмом называется кинематическая цепь, состоящая либо из отдельного элемента, либо в качестве альтернативы из ряда элементов, причем положение каждой точки в кинематической цепи выводят из положения каждой другой точки цепи. Далее в рамках данной заявки под концевым исполнительным элементом понимают элемент, который в кинематической цепи предшествует концевому выходному элементу, например вилку переключения. Конечный выходной механизм содержит обычно муфту скольжения, вилку переключения, палец переключения, кинематику для передающего движение или усилие соединения пальца переключения с приводом выбора и переключения, причем за счет кинематики установлена определенная передача, например, посредством рычага и/или образованной червяком с червячным колесом передаточной ступени.
Согласно одному усовершенствованию этого предпочтительного варианта выполнения адаптация позиции порога синхронизации содержит следующие этапы: расчет установленной позиции порога синхронизации посредством приданного устройству управления вычислительного устройства для непосредственного использования или для определения новой позиции порога синхронизации на основе этой, а также старой позиции порога синхронизации.
Согласно другому особенно предпочтительному усовершенствованию изобретения у автомобиля, у которого позиции конечных положений передач сохранены в приданной устройству управления памяти и эти позиции во время работы адаптируют, определение позиции порога синхронизации осуществляется, по меньшей мере, временно на основе адаптированных конечных положений передач.
Целесообразным является то, что по истечении заданного времени или после заданного числа независимых процессов адаптации, по меньшей мере, один раз определяются позиции порога синхронизации на основе адаптированных конечных положений передач. В одном предпочтительном примере выполнения диапазон заданного времени составляет от 40 до 200 часов, в частности от 80 до 120 часов, а заданное число независимых процессов адаптации составляет от 15 до 80, в частности от 40 до 60.
Для решения другого аспекта задачи согласно другому варианту выполнения у автомобиля, содержащего приводной двигатель, устройство передачи крутящего момента с первым исполнительным устройством, коробку передач с ведущим и ведомым валами и вторым исполнительным устройством, причем коробка передач содержит образующие передаточные ступени блоки шестерен, образованные неподвижно соединенной с валом шестерней и установленным с возможностью соединения с валом колесом-кареткой, и устройство управления, причем первое и второе исполнительные устройства выполнены с возможностью автоматического приведения в действие посредством устройства управления, причем в первом режиме эксплуатации приведение в действие инициируется самопроизвольно устройством управления на основе нескольких входных величин, а во втором режиме эксплуатации приведение в действие осуществляется за счет ввода водителем, причем соединение колеса-каретки, по меньшей мере, одной передаточной ступени с несущим его валом осуществляется посредством концевого выходного элемента, такого как муфта скольжения, с синхронизатором, который, прикладывая синхронизирующее усилие во время включения, создает, по меньшей мере, приблизительное равенство частот вращения соединяемых элементов, обеспечивает полное включение только по завершении процесса синхронизации при, по меньшей мере, приблизительном равенстве частот вращения, причем синхронизирующее усилие модулируется в зависимости от опыта водителя, нагрузки автомобиля, температуры трансмиссионного масла, положения нагрузочного рычага, требования к моменту приводного двигателя, требуемой частоты вращения ведущего вала коробки передач, разности частот вращения на синхронизаторе, фрикционной характеристики синхронизатора, инерционных моментов коробки передач и/или состояния синхронизатора. Синхронизирующее усилие можно согласовать с несколькими переменными параметрами, так что в зависимости от этих параметров, которые могут изменяться в течение работы и/или изменяются от одного процесса переключения до другого, осуществляют соответствующее согласование, так что может протекать оптимизированный ход процесса синхронизации.
У автомобиля, содержащего приводной двигатель, устройство передачи крутящего момента с первым исполнительным устройством, коробку передач с ведущим и ведомым валами и вторым исполнительным устройством, причем коробка передач содержит образующие передаточные ступени блоки шестерен, образованные неподвижно соединенной с валом шестерней и установленным с возможностью соединения с валом колесом-кареткой, и устройство управления, причем первое и второе исполнительные устройства выполнены с возможностью автоматического приведения в действие посредством устройства управления, причем в первом режиме эксплуатации приведение в действие инициируется самостоятельно устройством управления на основе нескольких входных величин, а во втором режиме эксплуатации приведение в действие осуществляется водителем за счет ввода, причем соединение колеса-каретки, по меньшей мере, одной передаточной ступени с несущим его валом выполнено посредством концевого выходного элемента, такого как муфта скольжения или втулка включения, с синхронизатором, который, прикладывая синхронизирующее усилие во время включения, создает, по меньшей мере, приблизительное равенство частот вращения соединяемых элементов и обеспечивает полное включение только по завершении процесса синхронизации при, по меньшей мере, приблизительном равенстве частот вращения, для решения другого аспекта в одном особенно предпочтительном примере выполнения как приближение к порогу синхронизации, так и сам процесс синхронизации выполнен с управлением усилием концевого выходного элемента. Это имеет, в частности, преимущества, поскольку на пороге синхронизации должно быть установлено заданное усилие, что происходит предпочтительно посредством управления усилием и предотвращает переход между различными видами управления, такими, например, как управление скоростью и усилием, со связанными с этим недостатками.
Предпочтительно для управления усилием концевого выходного элемента определяется противодействующее ему ответное усилие, причем целесообразно, если ответное усилие определяется на основе скорости концевого исполнительного механизма с учетом кинетической энергии концевого исполнительного механизма, а также, при необходимости, жесткости его пружины. С одной стороны, это кинетическая энергия муфты скольжения, а с другой стороны, также кинетическая энергия подвижных частей кинематической цепи и привода.
С учетом жесткости пружины концевого исполнительного механизма, в частности при ответных усилиях выше порога срабатывания жесткости этой пружины, весьма предпочтительно использовать ее характеристику для оценки непосредственно или косвенно. Часто концевой исполнительный механизм содержит пружиняще-демпфирующий элемент для целенаправленного регулирования жесткости пружины. Его характеристика находит предпочтительно применение, в данном случае, при дополнении жесткости, которая сама по себе обусловлена механизмом.
Согласно одному особенно предпочтительному усовершенствованию этого варианта выполнения оценка ответного усилия осуществляется на основе закона сохранения энергии с помощью работы, совершенной приводом концевого исполнительного механизма.
Для решения еще одного аспекта задачи применяют согласно изобретению способ приближения к позиции синхронизации концевого выходного элемента концевого исполнительного механизма коробки передач для автомобиля с коробкой передач с инерционной синхронизацией включения, при котором осуществляется управление усилием концевого выходного элемента, а позиция синхронизации достигается максимально быстро без перехода за позицию синхронизации. В этой связи особенно предпочтительно, если управление усилием концевого выходного элемента выполнено на основе уравнения колебаний с использованием постоянной демпфирования, которая обеспечивает приближение, независимое от точной начальной скорости концевого выходного элемента концевого исполнительного механизма коробки передач и точного положения позиции синхронизации, и зависит от синхронизирующего усилия.
Другой аспект решения задачи заключается в управлении таким образом, что создание заданного усилия включения на муфте скольжения происходит на основе скорости включения, а также упругости в зоне механизма. Упругость при этом целенаправленно используют, с тем чтобы кинетическую энергию исполнительного устройства преобразовать при набегании на порог синхронизации в потенциальную энергию.
Согласно изобретению предложен автомобиль, содержащий приводной двигатель, устройство передачи крутящего момента с первым исполнительным устройством, коробку передач с ведущим и ведомым валами и вторым исполнительным устройством, причем коробка передач содержит образующие передаточные ступени блоки шестерен, образованные неподвижно соединенной с валом шестерней и установленным с возможностью соединения с валом колесом-кареткой, и устройство управления, причем первое и второе исполнительные устройства выполнены с возможностью автоматического приведения в действие посредством устройства управления, причем в первом режиме эксплуатации приведение в действие инициируется самопроизвольно устройством управления на основе нескольких входных величин, а во втором режиме эксплуатации приведение в действие осуществляется водителем за счет ввода, причем соединение колеса-каретки, по меньшей мере, одной передаточной ступени с несущим его валом выполнено посредством муфты переключения, содержащий синхронизатор, причем синхронизатор, в данном случае, обеспечивает включение только при, по меньшей мере, приблизительном равенстве частот вращения, и/или соединение колеса-каретки, по меньшей мере, одной передаточной ступени с несущим его валом осуществляется посредством муфты переключения, не содержащей синхронизатор, причем уравнивание частот вращения обеих соединяемых частей муфты достигается посредством устройства управления, а включение осуществляется только при, по меньшей мере, приблизительном равенстве частот вращения, а также осуществляется управление усилием концевого выходного элемента.
Предпочтительным является то, что для управления усилием концевого выходного элемента определяется противодействующее ему ответное усилие, причем оценку ответного усилия осуществляют на основе закона сохранении энергии с помощью работы, совершенной приводом концевого исполнительного механизма.
Согласно изобретению предложен автомобиль, содержащий приводной двигатель, устройство передачи крутящего момента с первым исполнительным устройством, коробку передач с ведущим и ведомым валами и вторым исполнительным устройством, причем коробка передач содержит образующие передаточные ступени блоки шестерен, образованные неподвижно соединенной с валом шестерней и установленным с возможностью соединения с валом колесом-кареткой, и устройство управления, причем первое и второе исполнительные устройства выполнены с возможностью автоматического приведения в действие посредством устройства управления, причем в первом режиме эксплуатации приведение в действие инициируется самопроизвольно устройством управления на основе нескольких входных величин, а во втором режиме эксплуатации приведение в действие осуществляется водителем за счет ввода, причем соединение колеса-каретки, по меньшей мере, одной передаточной ступени с несущим его валом выполнено посредством концевого выходного элемента, такого как муфта переключения, с синхронизатором, который, прикладывая синхронизирующее усилие во время включения, создает, по меньшей мере, приблизительное равенство частот вращения соединяемых элементов и обеспечивает полное включение только при завершенном процессе синхронизации при, по меньшей мере, приблизительном равенстве частот вращения, отличающийся тем, что приближение к порогу синхронизации и процесс синхронизации осуществляется посредством управления усилием концевого выходного элемента.
Целесообразным является то, что для управления усилием концевого выходного элемента определяется противодействующее ему ответное усилие, причем оценку ответного усилия осуществляют на основе закона сохранения энергии с помощью работы, совершенной приводом концевого исполнительного механизма.
Согласно изобретению предложена коробка передач для автомобиля, содержащая образующие передаточные ступени блоки шестерен, образованные неподвижно соединенной с одним валом шестерней и установленным с возможностью соединения с другим валом, введенным в зацепление с шестерней посредством колеса-каретки, а также содержащая муфты скольжения, предназначенные для соединения колеса-каретки передаточной ступени и несущего его вала, приводные средства, предназначенные для создания движения включения и выключения муфт скольжения, механизм для соединения приводных средств с муфтами скольжения, упругое устройство в зоне механизма, которое предназначено для аккумулирования кинетической энергии и преобразования ее в потенциальную энергию и, наоборот, отдачи потенциальной энергии и преобразования ее в кинетическую энергию, а также устройство управления приводными средствами.
Согласно одной особенно предпочтительной форме выполнения коробки передач, которая содержит между муфтой скольжения и колесом-кареткой синхронизаторы, предназначенные для того, чтобы в процессе включения блокировать полное включение с образованием геометрического замыкания на пороге синхронизации до тех пор, пока не будет достигнуто, по меньшей мере, приблизительное равенство частот вращения, причем обусловленная блокированием движения включения на пороге синхронизации кинетическая энергия аккумулируется в упругом устройстве в виде потенциальной энергии, при этом в момент произошедшего блокирования движения включения аккумулированная в упругом устройстве энергия, по меньшей мере, приблизительно соответствует заданному усилию.
Понятия заданное усилие включения или усилие синхронизатора обозначают в рамках данного изобретения соответствующее усилие на исполнительном устройстве, таком как палец переключения, для управления муфтой скольжения.
В одном предпочтительном варианте выполнения изобретения скорость приближения к порогу синхронизации выбирают в зависимости от характеристики упругости упругого устройства так, что в момент блокировки движения включения накопленная в упругом устройстве энергия, по меньшей мере, приблизительно соответствует заданному усилию. В этот момент приблизительно вся кинетическая энергия накоплена в упругом устройстве в виде зарядной энергии, так что в соответствии с минимумом скорости в упругом устройстве имеет место максимум энергии. В этом примере выполнения точное установление заданного или синхронизирующего усилия на пороге синхронизации происходит предпочтительно за счет соответствующей модуляции скорости приближения к порогу синхронизации.
В другом целесообразном варианте выполнения в зависимости от скорости приближения к порогу синхронизации выбирают упругое устройство с определенной характеристикой, так что в момент блокировки движения включения накопленная в упругом устройстве энергия, по меньшей мере, приблизительно соответствует заданному усилию. В этом варианте выполнения при заданной скорости приближения к порогу синхронизации за счет выбора соответствующего упругого устройства достигается нужное заданное усилие на пороге синхронизации.
В предпочтительном примере выполнения порог срабатывания упругого устройства, по существу, ниже усилий, возникающих в процессе синхронизации. Таким образом, во время каждого синхронизированного процесса переключения создание усилия на пороге синхронизации происходит с использованием упругого устройства и его характеристики.
В зависимости от заданного усилия на пороге синхронизации предпочтительно, если упругое устройство срабатывает при синхронизирующем усилии в диапазоне 50-450 Н, 200-600 Н или 400-1000 Н. В одном особенно предпочтительном варианте выполнения порог срабатывания лежит в диапазоне 150-350 Н.
Согласно изобретению предложена коробка передач для автомобиля, содержащая образующие передаточные ступени блоки шестерен, образованные прочно соединенной с одним валом шестерней передачи и установленным с возможностью соединения с другим валом, введенным в зацепление с шестерней посредством колеса-каретки, а также содержащая муфты скольжения, предназначенные для соединения колеса-каретки передаточной ступени и несущего его вала, приводные средства, предназначенные для создания движения включения и выключения муфт скольжения, механизм для соединения приводных средств с муфтами скольжения, упругое устройство в зоне механизма, которое предназначено для аккумулирования кинетической энергии и преобразования ее в потенциальную энергию и, наоборот, отдачи потенциальной энергии и преобразования ее в кинетическую энергию, а также устройство управления приводными средствами, причем управление осуществляется с возможностью создания заданного усилия включения на основе скорости включения и упругого устройства в зоне механизма.
Предпочтительным является то, что коробка передач содержит установленные между муфтой скольжения и колесом-кареткой синхронизаторы, которые предназначены для блокирования полного включения во время процесса включения с образованием геометрического замыкания на пороге синхронизации до тех пор, пока не будет достигнуто, по меньшей мере, приблизительное равенство частот вращения, причем, будучи обусловленной блокированием движения включения на пороге синхронизации, кинетическая энергия аккумулируется в упругом устройстве в виде потенциальной энергии, при этом в момент произошедшего блокирования движения включения аккумулированная в упругом устройстве энергия, по меньшей мере, приблизительно соответствует заданному усилию.
Скорость приближения к порогу синхронизации выбрана в зависимости от характеристики упругости упругого устройства так, что в момент произошедшего блокирования движения включения аккумулированная в упругом устройстве энергия, по меньшей мере, приблизительно соответствует заданному усилию, а характеристика упругости упругого устройства выбрана в зависимости от скорости приближения к порогу синхронизации так, что в момент блокирования движения включения аккумулированная в упругом устройстве энергия, по меньшей мере, приблизительно соответствует заданному усилию.
Порог срабатывания упругого устройства, по существу, ниже усилий, возникающих в процессе синхронизации, причем упругое устройство срабатывает при синхронизирующем усилии 40-450 Н, 200-600 Н или 400-1000 Н, в частности, 150-350 Н.
Далее для решения задачи предложен способ эксплуатации коробки передач для автомобиля, содержащей образующие передаточные ступени блоки шестерен, образованные неподвижно соединенной с одним валом шестерней и установленным с возможностью соединения с другим валом, введенным в зацепление с шестерней передачи посредством колеса-каретки. Коробка передач содержит муфты скольжения, предназначенные для соединения колеса-каретки передаточной ступени с несущим его валом, приводные средства, предназначенные для создания движения включения и выключения муфты скольжения, механизм для соединения приводных средств с муфтами скольжения, установленные между муфтой скольжения и колесом-кареткой синхронизаторы, предназначенные для создания в процессе включения на основе усилия включения с фрикционным замыканием синхронизирующего момента и блокирования дальнейшего включения за пределы этого порога синхронизации до момента, пока не будет достигнуто, по меньшей мере, приблизительное равенство частот вращения, упругое устройство в зоне механизма, предназначенное для аккумулирования кинетической энергии и преобразования ее в потенциальную энергию и, наоборот, отдачи потенциальной энергии и преобразования ее в кинетическую энергию, а также устройство управления приводными средствами, причем установление передаточного отношения содержит этапы: включение муфты скольжения с управлением скоростью до порога синхронизации, обнаружение ответного усилия, вызванного блокированием на пороге синхронизации, а затем переход к управлению усилием, причем за счет блокирования движения включения на пороге синхронизации в упругом устройстве аккумулируется энергия.
Предпочтительным является применение способа в коробке передач, которая отличается признаками, по меньшей мере, одного из пп.1-5 формулы.
Ниже варианты выполнения изобретения более подробно поясняются с помощью фигур, на которых представлено:
- фиг.1: схематично и в качестве примера автомобиль с приводимым в действие автоматически устройством передачи крутящего момента и приводимой в действие автоматически коробкой передач;
- фиг.2, 2а: схематично и в качестве примера муфта переключения передач;
- фиг.3: схематично и в качестве примера диаграмма условий инициализации для адаптации порога синхронизации;
- фиг.3а: схематично и в качестве примера привод и скользящая муфта с соединительным механизмом;
- фиг.4а: диаграмма зависимости синхронизирующего усилия, например, от положения нагрузочного рычага;
- фиг.4b: диаграмма зависимой, например, от температуры коробки передач компенсации синхронизирующего усилия;
- фиг.4с: в качестве примера, образование заданного синхронизирующего усилия из синхронизирующего усилия, согласно характеристике, и сдвигу усилия;
- фиг.4d: в качестве примера, характеристика охватываемого механизмом упругого устройства переключения и характеристика усилия и пути в процессе переключения;
- фиг.5а: блок-схема управления приводом для приведения в действие муфты скольжения;
- фиг.5b: различные кривые для достижения заданного положения муфты скольжения при заданной работе привода на диаграмме скорость-работа;
- фиг.5с: оптимальная кривая на диаграмме скорость-работа;
- фиг.6: блок-схема управления приводом для приведения в действие муфты скольжения.
На фиг.1 схематично и в качестве примера представлен автомобиль 1 с устройством 4 передачи крутящего момента и коробкой 6 передач. Устройство 4 передачи крутящего момента расположено в данном случае в силовом потоке между приводным двигателем 2 и коробкой 6 передач; целесообразно между приводным двигателем 2 и устройством 4 передачи крутящего момента расположена разъемная маховая масса, частичные массы которой установлены с возможностью проворачивания по отношению друг к другу через пружиняще-демпфирующее устройство, за счет чего существенно улучшаются, в частности, колебательно-технические свойства кинематической цепи. Преимущественно изобретение комбинируют с демпфирующим устройством для гашения или уравнивания вращательных толчков, или с устройством для компенсации вращательных толчков, или с уменьшающим вращательный толчок устройством, или с устройством для демпфирования колебаний, как оно описано, в частности, в публикациях заявителя DE OS 3418671, DE OS 3411092, DE OS 3411239, DE OS 3630398, DE OS 3628774, DE OS 3721712. Автомобиль 1 приводится в движение приводным двигателем 2, представленным в данном случае в виде двигателя внутреннего сгорания, такого как двигатель Отто или дизельный двигатель; в другом примере выполнения привод может осуществляться также посредством гибридного привода, электро- или гидродвигателя. Устройство 4 передачи крутящего момента представляет собой в представленном примере выполнения фрикционное сцепление, которое разъединяет приводной двигатель 2 с коробкой 6 передач, в частности для трогания с места или для осуществления процессов переключения передач. За счет дальнейшего включения и выключения сцепления передается больше или меньше момента, для чего нажимной и ведомый диски аксиально смещаются по отношению друг к другу и больше или меньше передают вращение на расположенный между ними фрикционный диск. Выполненное в виде сцепления устройство 4 передачи крутящего момента является предпочтительно саморегулирующимся, т.е. износ фрикционных накладок компенсируется таким образом, что обеспечивается постоянное небольшое усилие выключения. Преимущественно изобретение комбинируют с фрикционным сцеплением, описанным, в частности, в заявках заявителя DE OS 4239291, DE OS 4239289, DE OS 4306505. Посредством вала 8 колеса 12 автомобиля 1 приводятся во вращение через дифференциал 10. Ведущим колесам 12 приданы датчики 160, 161 частоты вращения, причем, при необходимости, может быть предусмотрен только один датчик 160 или 161 частоты вращения, вырабатывающий сигнал в соответствии с частотой вращения колес 12; дополнительно или в качестве альтернативы в другом подходящем месте в кинематической цепи, например на валу 8, предусмотрен датчик 52 для определения частоты вращения на выходе коробки передач. Частоту вращения на входе коробки передач можно определить посредством дополнительного датчика или, как в данном примере выполнения, по частоте вращения приводного двигателя; таким образом, можно констатировать, например, установленное в коробке передач передаточное отношение. Приведение в действие фрикционного сцепления 4, которое может быть выполнено предпочтительно сжатым, а в другом примере целесообразно также тянутым, происходит в данном случае посредством исполнительного устройства 46, такого как исполнительное устройство сцепления. Для приведения в действие коробки 6 передач предусмотрено устройство срабатывания, содержащее два исполнительных устройства 48, 50, причем одно из исполнительных устройств осуществляет процесс выбора, а другое - процесс переключения. Исполнительное устройство 46 сцепления и/или исполнительные устройства 48,50 коробки передач выполнены в виде электродвигателей постоянного тока, причем в другом примере выполнения, в частности, когда требуются большие исполнительные усилия, может быть также целесообразным предусмотреть для приведения в действие гидросистему. Управление сцеплением 4 и коробкой 6 передач осуществляется посредством устройства 44 управления, которое целесообразно образует с исполнительным устройством 46 сцепления конструктивный блок, причем в другом варианте выполнения может быть также предпочтительным разместить его в другом месте автомобиля. Приведение в действие сцепления 4 и коробки 6 передач может происходить в автоматическом режиме за счет устройства 44 управления или в ручном режиме за счет ввода водителем посредством устройства 60 выбора передаточного отношения, такого как рычаг переключения, причем ввод регистрируют датчиком 61. В автоматическом режиме смена передаточных ступеней осуществляется за счет соответствующего управления исполнительными устройствами 46, 48, 50 согласно характеристикам, хранящимся в приданной устройству 44 управления памяти. Имеется несколько определяемых, по меньшей мере, одной характеристикой программ движения, между которыми водитель может выбирать, таких как спортивная программа движения, по которой приводной двигатель работает с оптимизацией мощности, экономичная программа, по которой двигатель работает с оптимизацией расхода топлива, или зимняя программа, по которой автомобиль 1 движется с оптимизацией безопасности движения; далее в описанном примере выполнения характеристики могут быть адаптивно согласованы, например, с поведением водителя и/или другими краевыми условиями, такими как трение проезжей части, наружная температура и т.д. Устройство 18 управления управляет приводным двигателем 2 путем влияния на подвод смеси или ее состав, причем на фиг.1 изображена замещающая этот процесс дроссельная заслонка 22, угол открывания которой регистрируют угловым датчиком 20, а сигнал которого подается к устройству 18 управления. У других выполнений регулирования приводного двигателя к устройству 18 управления, в случае если речь идет о двигателе внутреннего сгорания, подается соответствующий сигнал, с помощью которого можно определить состав смеси и/или подводимый объем; целесообразно используют также сигнал имеющегося кислородного датчика. Далее к устройству 18 управления в данном варианте выполнения подается сигнал приведенного в действие водителем нагрузочного рычага 14, положение которого регистрируют датчиком 16, а также сигнал частоты вращения двигателя от датчика 28 частоты вращения, который придан ведомому валу двигателя, сигнал датчика 26 давления во впускном газопроводе, а также сигнал датчика 24 температуры охлаждающей воды. Устройства 18, 44 управления могут быть выполнены на конструктивно и/или функционально отделенных участках, тогда они целесообразно соединены между собой для обмена данными, например, посредством сети доступа - электрической шины (54) (CAN-Bus) или другого электрического соединения. Однако может быть также предпочтительным объединение зон устройств управления, в частности, поскольку придание функций не всегда однозначно возможно, а взаимодействие необходимо. В частности, на определенных фазах смены передаточной ступени устройство 44 управления выполнено с возможностью управления приводным двигателем 2 в отношении частоты вращения и/или момента. Исполнительное устройство 46 сцепления и исполнительные устройства 48, 50 коробки передач вырабатывают сигналы, из которых может быть, по меньшей мере, выведена позиция исполнительного устройства и которые подаются к устройству 44 управления. Определение позиции происходит в данном случае внутри исполнительного устройства, причем используют инкрементный датчик, который определяет позицию исполнительного устройства по отношению к опорной точке. В другом варианте выполнения может быть, однако, также целесообразным расположить датчик вне исполнительного устройства и/или предусмотреть абсолютное определение позиции, например, посредством потенциометра. Определение позиции исполнительного устройства сцепления имеет большое значение, в частности потому, что за счет этого точка подхвата сцепления 4 может быть придана определенному пути включения и, тем самым, позиции исполнительного устройства. Предпочтительно точку подхвата сцепления 4 при пуске в работу и во время работы определяют повторно заново, в частности в зависимости от таких параметров, как износ сцепления, температура сцепления и т.д. Определение позиций исполнительных устройств коробки передач важно в отношении определения включенного передаточного отношения. Далее к устройству 44 управления подаются сигналы датчиков 62, 63 частоты вращения ведомых колес 65, 66. Для определения скорости автомобиля может быть целесообразным привлечение среднего значения датчиков 62,63; 160,161 частоты вращения. Посредством сигналов частоты вращения можно определить скорость автомобиля и, кроме того, обнаружить также пробуксовку. На фиг.1 выходные соединения устройств управления изображены сплошными линиями, а входные - штриховыми. Соединение датчиков 161, 62, 63 с устройством управления лишь обозначено.
На фиг.2 схематично и в качестве примера изображена синхронизированная муфта переключения коробки передач для соединения колеса-каретки 201 с жестко соединенной с валом ступицей 203 синхронизатора. Вид А показывает при этом муфту 202 скольжения в нейтральном положении, вид В - предварительную синхронизацию, а вид С - главную синхронизацию. Муфта 202 скольжения, приводимая в действие вилкой 211 переключения, жестко, однако с возможностью осевого перемещения соединена со ступицей 203 синхронизатора вместе с блокировочным кольцом 204 синхронизатора, которое с ползунами 206 и взаимодействующими с ними пружинами 205 сжатия образует синхронизатор.
На фазе В предварительной синхронизации муфта 202 скольжения смещается с предварительным синхронизирующим усилием FAV в направлении колеса-каретки 201. За счет трения по конической поверхности R трения между блокировочным кольцом 204 синхронизатора и колесом-кареткой 201 вырабатывается предварительный синхронизирующий момент ТRV, за счет чего блокировочное кольцо 204 синхронизатора поворачивается до упора ползунов 206 в боковой край выемок 210 для них в блокирующее исходное положение. В блокирующем исходном положении за счет осевого перемещения муфты 202 скольжения происходит расхождение скосов зубьев переключающего зубчатого венца 209 муфты скольжения и включающего зубчатого венца 208 колеса-каретки 201 аксиально друг от друга в зоне D. В дальнейшем процессе предварительное синхронизирующее усилие FAV, будучи обусловлено рампообразным выполнением в зоне ползун/муфта скольжения, вызывает против усилия FD пружины 205 сжатия опрокидывание ползунов 206, за счет чего становится возможным дальнейшее осевое перемещение муфты 202 скольжения, и происходит переход к фазе С главной синхронизации, на которой скосы зубьев переключающего зубчатого венца 209 муфты скольжения и переключающего зубчатого венца 208 колеса-каретки попадают друг на друга; эта позиция называется в данном случае позицией синхронизации. Далее через скосы зубьев прикладывается осевое синхронизирующее усилие FA, и на конической поверхности трения между блокировочным кольцом 204 синхронизатора и конусом синхронизатора колеса-каретки 201 создается момент TR трения, в результате чего происходит синхронизация частот вращения колеса-каретки 201 и муфты 202 скольжения.
В другом примере выполнения синхронизатор выполнен с возможностью соединения также с колесом-кареткой. В другом примере целесообразно также другое выполнение синхронизатора. При необходимости, позиция, названная в данном случае позицией синхронизации, может быть иной, что, однако, ничего не меняет в реализации идеи изобретения.
На фиг.2а схематично и в качестве примера изображена муфта переключения коробки передач для соединения колеса-каретки 205а с несущим его валом 201а. Муфта 203а скольжения в этом примере выполнения установлена на аксиально и жестко соединенном с валом 201а соединительном элементе 202а, на котором она расположена с возможностью осевого перемещения, однако жестко; с колесом-кареткой 205а соединен синхронизатор 204а.
В исходном положении 200а обе соединяемые между собой части 202а, 205а муфты переключения еще отделены друг от друга, муфта 203а скольжения находится в полностью выключенном положении А'. При перемещении муфты 203а скольжения по стрелке достигается положение 210а, в котором синхронизатор 204а конической поверхностью трения вступает в соединение с соответствующей поверхностью муфты 203а скольжения. Будучи обусловлен трением и действующим по стрелке усилием включения, происходит возрастающий подхват колеса-каретки 205а, причем создается момент подхвата, который может вызвать срабатывание расположенного, например, на муфте 203а скольжения блокировочного устройства (не показано), препятствующего дальнейшему включению муфты 203а скольжения; эта позиция называется позицией или порогом синхронизации. Если колесо-каретка 205а, по меньшей мере, приблизительно достигло частоты вращения муфты 203а скольжения, а момент подхвата, тем самым, по меньшей мере, приблизительно упал до нуля, блокировочное устройство размыкается, и муфта 203а скольжения может перейти из положения В' в положение С'. В полностью включенном положении 220а между муфтой 203а скольжения и колесом-кареткой 205а создано соединение с геометрическим замыканием в направлении периферии, так что колесо-каретка 205а через муфту 203а скольжения и элемент 202а соединено с валом 201.
На фиг.3 схематично и в качестве примера изображена блок-схема условий инициализации адаптации порога синхронизации. В этом примере выполнения на этапе 301 проверяют, стоит ли автомобиль на месте, целесообразно может, однако, потребоваться, когда автомобиль стоит на месте с заданного времени t, обеспечить, чтобы быстро вращающиеся валы уменьшили скорость своего вращения. Если этого не происходит, то адаптацию порога синхронизации не осуществляют (блок 307), в противном случае на этапе 302 устанавливают, нажат ли тормоз автомобиля, с тем чтобы обеспечить, чтобы автомобиль на основе необходимого для адаптации небольшого передаваемого на колеса момента не трогался с места. При ненажатом тормозе автомобиля адаптацию порога синхронизации не осуществляют (блок 307), в противном случае на этапе 303 проверяют, работает ли приводной двигатель на холостых оборотах, что предотвращает слишком большую разность частот вращения на синхронизаторе. Только если это так, то переходят к этапу 304, в противном случае адаптацию порога синхронизации не осуществляют. На этапе 304 устанавливают, включена ли передаточная ступень, и только если это так, продолжают действия на этапе 305, в противном случае переходят к блоку 307. Только если адаптация требуется, на этапе 306 проверяют, имеет ли место другая адаптация с более высоким приоритетом, которая делает необходимым переход к этапу 307. Если адаптация с более высоким приоритетом не имеет места, то на этапе 308 осуществляют адаптацию порога синхронизации; если должна осуществляться адаптация с более высоким приоритетом или прочая функция, которая совпала бы с осуществлением адаптации порога синхронизации, то адаптацию порога синхронизации откладывают до тех пор, пока эта другая адаптация или функция не будет завершена, и лишь затем выполняют ее.
Описанные критерии инициализации адаптации порога синхронизации являются лишь примером. Так, в других примерах выполнения критерии могут быть проверены в ином порядке, в частности может быть целесообразным поставить в начало запрос, требуется ли адаптация или имеет ли место иная адаптация с более высоким приоритетом или функция. Может быть также целесообразным обойти один или несколько критериев, т.е., несмотря на предусмотренный переход к этапу 307, продолжить осуществление адаптации на этапе 308, что обозначено штриховыми соединениями. В других примерах выполнения может быть далее предпочтительным сделать инициализацию адаптации порога синхронизации зависимой от других или дополнительных критериев.
Для осуществления адаптации порога синхронизации в одном предпочтительном примере выполнения включают сцепление 4 для трогания с места, причем достаточно включить сцепление настолько, чтобы передавался, по меньшей мере, момент, который достаточно велик, чтобы действовало соединенное с муфтой скольжения блокировочное устройство. На следующем этапе в направлении выбора включают передачу, порог синхронизации которой должен быть адаптирован, например исполнительное устройство 48 приводят в действие так, что палец переключения вступает в соединение с относящейся к данной передаточной ступени вилкой переключения или, по меньшей мере, движется близко к данной вилке переключения. Преимущественно на этом этапе выбирают середину коридора переключения в качестве исходной позиции, поскольку затем хорошо достижимы все позиции; в модифицированных примерах выполнения может быть, однако, весьма предпочтительным выбрать иную позицию в данном коридоре переключения, например позицию в коридоре выбора непосредственно перед коридором переключения передачи, порог синхронизации которой должен быть адаптирован. Исходя из этой позиции, преимущественно нейтральной, от которой из порога синхронизации муфту скольжения смещают в направлении конечного положения передаточной ступени, позиция синхронизации которой должна быть адаптирована, причем скорость перемещения очень мала по сравнению с нормальным процессом переключения. Перемещение в направлении конечного положения осуществляется целесообразно с регулированием частоты вращения с определенной скоростью, управляемой через угловое ускорение с определенным ускорением, с управляемым моментом с определенным усилием, через угловое положение привода, управляемое с определенным путем либо итеративно, либо со стохастическим заданием пути, посредством управления напряжением привода или управления током привода. Предпочтительным может быть также использование комбинации названных видов управления.
Так, при работающем двигателе 2, преимущественно на холостых оборотах, и при включенном сцеплении 4 возникает разность частот вращения ведущего и ведомого валов коробки передач. Как видно из фиг.2 и ее описания, за счет момента подхвата на синхронизаторе происходит блокировка движения включения, эта позиция муфты скольжения может быть установлена как позиция синхронизации. Полученное значение позиции муфты скольжения можно использовать как исходное значение или как значение, манипулируемое с поправочными значениями, предпочтительно используемое значение вычисляют из этого заново полученного и старого значений.
Обнаружение блокировки движения муфты 203 скольжения происходит целесообразно путем наблюдения пути муфты скольжения, скорости муфты скольжения, ускорения муфты скольжения, причем эту информацию снимают предпочтительно в зоне концевого выходного механизма или в зоне механизма, приводящего его в движение; преимущественно используют встроенный в привод датчик, такой как инкрементный датчик пути. Согласно другому примеру выполнения блокировку движения осуществляют в зоне вблизи муфты скольжения, в частности перед имеющимся, при необходимости, упругим устройством переключения, что предотвращает искажение за счет упругостей и/или зазоров. В другом примере выполнения обнаружение блокировки движения муфты 203 скольжения происходит посредством измерения усилия в зоне кинетической цепи между муфтой скольжения и приводом. В другом предпочтительном примере выполнения блокировку движения муфты 203 скольжения устанавливают через потребляемую приводом мощность.
Определение позиции синхронизации происходит в предпочтительном примере выполнения через угловое положение, частоту вращения или угловое ускорение приводного двигателя, причем, целесообразно, находит применение встроенный в привод инкрементный датчик пути. В другом предпочтительном примере выполнения определение позиции происходит через напряжение или ток приводного двигателя, а в другом предпочтительном примере выполнения находит применение определение посредством угловой скорости и/или передаваемого момента одного или нескольких валов коробки передач. Согласно другому целесообразному примеру выполнения блокировку движения муфты скольжения определяют посредством комбинации вышеописанных этапов.
Для операции вычисления полученной позиции синхронизации с помощью вычислительного устройства в предпочтительном примере выполнения используют алгоритм, который осуществляет мультипликативную и/или аддитивную корректировку полученной позиции синхронизации. В другом примере выполнения целесообразно использование алгоритма корректировки, основанного на иной математической закономерности, такой как степень, логарифм, дифференциал и/или интеграл, причем может быть предпочтительным также комбинирование с корректировочным видом алгоритма в предпочтительном примере выполнения. Разработка предпочтительного алгоритма корректировки происходит на основе эмпирических значений, опытов, расчетов посредством моделирования кинематической передаточной цепи, имитаций, замеров и/или анализов чертежей конструкции.
Если, как в предпочтительном примере выполнения, новый порог синхронизации образуют из заново определяемого порога синхронизации и из старого, то примерное правило расчета могло бы выглядеть следующим образом:
Порог синхронизации новый = (х · порог синхронизации старый + у · порог синхронизации установленный)/100,
(SyncSchwelle.neu=(x·SyncSchwelle.alt+у·SyncSchwelle.ermittelt)/100),
где коэффициент х преимущественно очень велик, например 80-100, а коэффициент у преимущественно очень мал, например 0-20.
В предпочтительном примере выполнения адаптацию порогов синхронизации осуществляют в описанных выше условиях. В случае если водитель, например при адаптации во время остановки у светофора, даст газ, то автомобиль должен как можно быстрее ускориться, нужная передача должна быть включена в этом случае сразу же, как только выключатель холостого хода выключен и/или тормоз отпущен. Особенно предпочтителен пример выполнения, у которого нужную передаточную ступень включают в описанном случае в течение 600 мс, в частности в течение 300-400 мс.
Описанные примеры выполнения изобретения могут найти применение также, в частности, при определении позиций синхронизации передаточных ступеней в автомобилях-прототипах или в серийных автомобилях в рамках программы ввода в эксплуатацию.
Будучи обусловлен уже описанным принципом действия синхронизатора, синхронизирующий момент зависит от коэффициента μ трения синхронизатора, синхронизирующего усилия FSync в соответствии с усилием включения и радиуса RReib трения кольцеобразного синхронизатора, причем для синхронизирующего момента MSync можно приблизительно принять:
MSync=μ·Fsync·RReib
Величина синхронизирующего момента оказывает непосредственное влияние на комфорт переключения, поскольку высокий синхронизирующий момент может вызвать создающие помехи шумы и вибрации. Влияние можно оказать через синхронизирующее усилие FSync.
Согласно предпочтительному выполнению изобретения предусмотрена модуляция синхронизирующего усилия FSync таким образом, что в кинематической цепи не возникает шумов или вибраций, а процесс переключения протекает, таким образом, комфортабельнее. Модуляция синхронизирующего усилия FSync может происходить в зависимости от одного или нескольких параметров, как это описано ниже, причем в качестве на фиг.4а изображена зависимость от положения нагрузочного рычага, а на фиг.4b изображено образование зависимого от температуры трансмиссионного масла сдвига. На фиг.4с изображено образование заданного синхронизирующего усилия из синхронизирующего усилия в соответствии с полем характеристик и сдвигом усилия.
В случае зависимости от положения нагрузочного рычага на фиг.4а в предпочтительном примере выполнения по мере увеличения положения нагрузочного рычага синхронизирующее усилие FSync повышается, причем повышение происходит для каждой передаточной ступени согласно собственной характеристике. Преимущественно синхронизирующее усилие FSync исходя из определенного значения при положении нагрузочного рычага нуль в соответствии с ненажатой педалью акселератора повышается примерно до двойного значения при переключении с полным газом; при переключении в условиях резкого нажатия до упора синхронизирующее усилие FSync еще больше повышается. Для автомобиля малой мощности с двигателем объемом 1-1,8 л предпочтительна, например, модуляция синхронизирующего усилия FSync с 120-310 Нм, в частности с 190-250 Нм, до 420-650 Нм, в частности до 490-560 Нм; у автомобилей большей мощности синхронизирующее усилие FSync модулируют с соответствующим согласованием. Для передачи заднего хода в изображенном примере выполнения модуляции синхронизирующего усилия FSync не происходит. Точная форма характеристик зависит от того, какое синхронизирующее усилие FSync для передаточной ступени при определенном положении нагрузочного рычага наиболее оптимальное, что можно определить, например, расчетным или опытным путем. Таким образом, оптимальный в отношении синхронизирующего усилия FSync процесс переключения возможен в зависимости от положения нагрузочного рычага для каждой передаточной ступени. Предпочтительно, если формы характеристик, в основном, линейные, причем в другом примере выполнения может быть также целесообразно, если характеристики или области характеристик имеют форму, которая соответствует нелинейной функции, такой как функция синус, функция тангенс, экспоненциальная функция, логарифмическая функция или параболическая функция, или аналогичная ей. Для упрощения управления в другом примере выполнения может быть также предпочтительным использование единственной характеристики для всех передаточных ступеней или многократное использование, по меньшей мере, одной характеристики.
На фиг.4b на примере температуры трансмиссионного масла показана характеристика сдвига, зависимого от одного параметра. В примере для температуры трансмиссионного масла ниже -20°С задают определенный сдвиг синхронизирующего усилия, который в интервале от -20 до 10°С уменьшается линейно до нуля, так что при температуре трансмиссионного масла выше 10°С сдвиг больше не задают. Характеристика сдвига в зависимости от температуры зависит, само собой, от характеристики вязкости трансмиссионного масла в зависимости от температуры, причем в данном примере выполнения в основу было положено использование обычного многодиапазонного трансмиссионного масла. За счет сдвига происходят согласование синхронизирующего усилия с вязкостью трансмиссионного масла и компенсация повышенных потерь усилия при обусловленной температурой меньшей вязкости, так что целесообразно при использовании другого масла предусмотрена соответствующая характеристика сдвига синхронизирующего усилия. В предпочтительном примере выполнения характеристика линейная, причем в другом примере выполнения может быть также целесообразным, если характеристика, по меньшей мере, на отдельных участках соответствует функции, такой как функция синус, функция тангенс, экспоненциальная функция, логарифмическая функция или параболическая функция, или аналогична ей.
Как показано на фиг.4с, в примере выполнения заданное синхронизирующее усилие определяют из синхронизирующего усилия, показанного на фиг.4а и взятого из поля характеристик, и сдвига, показанного на фиг.4b и образованного в соответствии с функцией сдвига. Для образования заданного синхронизирующего усилия в других предпочтительных выполнениях изобретения целесообразно также модулировать синхронизирующее усилие в качестве альтернативы или дополнительно на основе других параметров и/или образовать другое или дополнительные значения сдвига на основе других параметров.
В одном предпочтительном примере выполнения изобретения синхронизирующее усилие FSync модулируют на основе параметра водителя. Например, этот параметр водителя может обозначать тип водителя, причем при классификации от 1 до 100 1 обозначает водителя, ориентированного на снижение расхода топлива, а 100 - водителя, ориентированного на увеличение мощности двигателя. Тип водителя можно определить, например, путем наблюдения за нажатием нагрузочного рычага, тормоза и/или в ручном режиме за частотой переключения передач. В предпочтительном примере выполнения синхронизирующее усилие FSync тем выше, чем выше значение типа водителя, причем в поле характеристик зависимость синхронизирующего усилия от типа водителя предпочтительным образом, по меньшей мере, приблизительно линейная. В другом примере выполнения предпочтительна нелинейная зависимость синхронизирующего усилия, по меньшей мере, на отдельных участках согласно функции, которая соответствует функции, такой как функция синус, функция тангенс, экспоненциальная функция, логарифмическая функция или параболическая функция, или аналогична ей.
Согласно одному предпочтительному усовершенствованию изобретения синхронизирующее усилие FSync модулируют на основе параметра движения в гору. Например, этот параметр движения в гору может обозначать степень подъема дороги, причем при классификации от 1 до 100 1 обозначает ровную дорогу или в другом примере выполнения очень крутой уклон, а 100 - очень крутой подъем. Параметр движения в гору можно определить, например, на основе нажатия нагрузочного рычага, тормоза, в ручном режиме частоты переключения передач и/или одной или нескольких частот вращения колес. В предпочтительном примере выполнения синхронизирующее усилие FSync тем выше, чем выше значение параметра движения в гору, причем в поле характеристик зависимость синхронизирующего усилия от параметра движения в гору предпочтительным образом, по меньшей мере, приблизительно линейная. В другом примере выполнения предпочтительна нелинейная зависимость синхронизирующего усилия, по меньшей мере, на отдельных участках согласно функции, которая соответствует функции, такой как функция синус, функция тангенс, экспоненциальная функция, логарифмическая функция или параболическая функция, или аналогична ей.
Далее модуляция синхронизирующего усилия FSync в предпочтительных усовершенствованиях изобретения осуществляется на основе требования к моменту приводного двигателя, причем высокое требование к моменту вызывает повышение синхронизирующего усилия, на основе целевой частоты вращения новой передаточной ступени при ее смене, причем в соответствии с высокой целевой частотой вращения синхронизирующее усилие повышается, на основе преодолеваемой при синхронизации разности частот вращения, причем большая разность частот вращения вызывает повышение синхронизирующего усилия, на основе характера трения синхронизатора, причем небольшой коэффициент трения синхронизатора вызывает повышение синхронизирующего усилия, и/или на основе инерционного момента, обусловленного целевой передачей и уменьшенного до синхронизатора, причем большой уменьшенный инерционный момент вызывает повышение синхронизирующего усилия.
Весьма предпочтительным является моделирование синхронизирующего усилия в ходе процесса синхронизации, в частности, если к концу процесса синхронизации синхронизирующее усилие уменьшается, за счет чего, в том числе, повышается комфорт процесса переключения. Конец процесса синхронизации можно обнаружить, например, на основе небольшой тогда разности частот вращения синхронизируемых валов, причем разность частот вращения можно измерить непосредственно или определить внутри устройства управления с помощью математической модели.
Другая идея изобретения касается приближения к позиции синхронизации. Приближение к позиции синхронизации и создание синхронизирующего усилия осуществляют с управлением усилием. Таким образом, может происходить быстрое создание синхронизирующего усилия, независимое от неточной позиции синхронизации, хранящейся в приданной устройству 18, 44 управления памяти, благодаря чему все управление переключением становится относительно разбросов позиции синхронизации стабильнее. Желательно точно в тот момент, когда муфта 202 скольжения при движении включения останавливается на пороге С синхронизации, управлять приводом так, чтобы создать тогда точно нужное синхронизирующее усилие FA, что в предпочтительном примере выполнения происходит на основе совершенной приводом работы с использованием характеристики работа-усилие. Синхронизирующее усилие задают для этого исходя из закона сохранения энергии как функцию совершенной приводом механической работы.
На фиг.3а схематично и в качестве примера представлены привод 301а и муфта 304а скольжения с соединительным механизмом 305а, содержащим упругое устройство 302а и демпфер 303а. Целью является как можно быстрое приведение муфты 304а скольжения в позицию синхронизации и установление там как можно быстрее и точно нужного синхронизирующего усилия. Привод происходит при этом исходя из приводного двигателя через механизм, включающий в себя упругое устройство 302а и демпфер 303а, причем упругое устройство составлено, с одной стороны, из обусловленных конструкцией частей кинематической цепи, а с другой стороны, из специально предусмотренного пружинящего устройства, являющегося основной частью всего упругого устройства.
Это пружинящее устройство образовано в предпочтительном выполнении двумя проворачивающимися по отношению друг к другу элементами, пружины сжатия которых расположены промежуточно и против сопротивления которых оба элемента проворачиваются по отношению друг к другу. Усилие сопротивления или пружин возрастает с увеличением угла проворота, причем возрастание по всему диапазону проворота имеет, целесообразно, разный подъем, примерная характеристика представлена на фиг.4d. Для создания этой характеристики в последовательном или параллельном расположении предусмотрено несколько пружин сжатия с разными характеристиками. В другом примере выполнения может быть также целесообразным, если характеристика по всему диапазону перемещения имеет один и тот же подъем.
Согласно другой идее изобретения в качестве упругого устройства применяют эластомер, характеристику упругости которого устанавливают желаемым образом посредством соответствующего выбора материала и/или соответствующей обработки материала, например добавления влияющих на упругость веществ или применения влияющих на упругость способов получения или обработки. Также здесь предпочтительно, если эластомер по всему нагрузочному диапазону имеет изменяющийся подъем характеристики. В другом примере выполнения, однако, предпочтительно, если характеристика по всему нагрузочному диапазону имеет один и тот же подъем.
Установление порога срабатывания упругого устройства происходит в предпочтительном примере выполнения за счет натяженного монтажа упругих элементов, причем это натяжение в соответствии с нужным порогом срабатывания лежит в диапазоне 50-450 Н, 200-600 Н или 400-1000 Н. В одном особенно предпочтительном примере выполнения натяжение составляет 150-350 Н.
Согласно другому предпочтительному примеру выполнения предусмотрено разделение упругого устройства, т.е. предусмотрено несколько отдельных упругих устройств, которые по своему общему действию достигают нужного эффекта. В другом примере выполнения предусмотрено также использование упругих устройств, нагружаемых и действующих в осевом направлении. У данной коробки передач упругие устройства расположены внутри механизма между приводом и муфтой сцепления, причем приводом в этой связи называется собственно приводной элемент, например вал якоря приводного двигателя. Конструктивно упругое устройство встраивают предпочтительно внутри корпуса, который охватывает привод и последующую ступень коробки передач.
Поз. 303а обозначен демпфер механизма, причем демпфирование может основываться на обусловленном конструкцией трении или на дополнительном, при необходимости, регулируемом демпфирующем элементе. В изображенном примере выполнения предпочтительно, если для управления приводом 301а, муфтой 304а скольжения посредством устройства 18, 44 управления на фиг.1 в процессе включения муфту 304а скольжения с управлением скоростью подводят к порогу синхронизации, затем при ответном усилии, обнаруженном за счет блокировки дальнейшего движения включения описанным с помощью фиг.2 механизмом, происходит переход к управлению усилием, и усилие в этот момент на основе накопленной в упругом устройстве 302а энергии уже, по меньшей мере, приблизительно соответствует заданному усилию в позиции синхронизации. Решающим здесь является точное согласование упругого устройства 302а, с одной стороны, и скорости включения к позиции синхронизации, с другой стороны.
Приближение к позиции синхронизации происходит с управлением скоростью. Скорость регулируют до определенного значения с вводом характеристики упругости соединяющего привод 301а и муфту 304а скольжения механизма 305 в зависимости от требуемого заданного синхронизирующего усилия. В одном предпочтительном примере выполнения скорость приближения к порогу синхронизации лежит в диапазоне 25-200 мм/с в соответствии с требуемым заданным синхронизирующим усилием 250-1000 Н. При возрастании требуемого заданного синхронизирующего усилия втрое и при использовании упругого устройства с обозначенной на фиг.4 поз.401а характеристикой скорость приближения к порогу синхронизации возрастает, следовательно, примерно впятеро.
Во время приближения к позиции синхронизации с управлением скоростью уже наложено ограничение усилия, уровень которого сначала поддерживают низким, с тем чтобы компенсировать имеющееся в механизме трение, который, однако, затем повышают выше определенной скорости включения во избежание вращения обратно привода при быстро возрастающем ответном усилии. Предпочтительным является повышение уровня ограничения усилия начиная со скорости включения 3-40 мм/с, в частности 5-25 мм/с. Для компенсации трения при низкой скорости включения посредством наложения ограничения усилия целесообразно регулировать усилие в зависимости от вызванных трением величин, например температуры трансмиссионного масла, так что всегда соблюдается требуемая скорость включения. При большом трении происходит высокая компенсация, а при снижении трения компенсацию соответственно уменьшают.
Переход к управлению усилием происходит в позиции синхронизации, в которой движение включения муфты скольжения блокируется, упругое устройство заряжается с преобразованием кинетической энергии в потенциальную, и создается усилие, которое, по меньшей мере, приблизительно соответствует нужному синхронизирующему усилию; компенсация трения в механизме срабатывания происходит за счет продолжающего действовать в приводе приводного усилия. При использовании электродвигателя для привода происходит обнаружение блокировки движения на основе возрастания потребности двигателя в энергии и/или уменьшения скорости.
В дальнейшем усилие ограничивают или устанавливают на значение требуемого синхронизирующего усилия, причем необходимо лишь относительно небольшое изменение, поскольку уже вызванное упругим устройством усилие, по меньшей мере, приблизительно соответствует нужному синхронизирующему усилию. В предпочтительном примере выполнения оно лежит в диапазоне 100-1000 Н, причем синхронизация происходит, как правило, в диапазоне 200-600 Нм, и только если требуется особенно быстрая синхронизация, допускаются синхронизирующие усилия примерно до 1000 Н.
При переходе к управлению усилием и при использовании электродвигателя для привода муфты 304а скольжения для определения заданного усилия используют напряжение и частоту вращения приводного двигателя, за счет чего точно компенсируется фактически действующее трение в пределах фазы ограничения усилия. Предпочтительный способ обеспечивает, согласно другой идее изобретения, возможность использования унифицированного упругого устройства переключения для различных передаточных ступеней и/или коробок передач, а также для создания синхронизирующего усилия посредством соответствующего управления скоростью приближения к порогу синхронизации.
В данном примере выполнения за счет того, что упругое устройство 302а целенаправленно вводят в общий синхронизированный процесс включения, достигается в том числе значительная экономия времени. В связи с упругим устройством 302а переключения следует сослаться на заявки DE 19734023 А1 и DE 19713423 А1 заявителя, раскрытое содержание которых также относится к раскрытому содержанию данной заявки. В рамках предпочтительного управления синхронизированным процессом включения также особенно целесообразно, если в приданной устройству 18, 44 управления памяти хранится как можно более точная позиция порога синхронизации и это значение актуализируют с равными интервалами.
На фиг.4d на диаграмме 401а показана в качестве примера характеристика охватываемого механизмом 305а упругого устройства переключения, причем изображено возникшее при определенном усилии отклонение. После прохождения имеющихся в механизме зазоров Sp устанавливается соответствующее усилию F выключения отклонение, которое вплоть до точки 1 характеристики а, затем вплоть до точки 2 характеристики b проходит с заметно меньшим подъемом, а затем вплоть до конца зоны отклонения характеристики с снова проходит с заметно большим подъемом. Порог срабатывания упругого устройства, т.е. усилие, при котором происходит заметное отклонение, лежит ниже возникающих при синхронизированном процессе включения усилий в верхней части А характеристики. В данном примере выполнения предпочтительным является упругое устройство переключения, для отклонения которого примерно на 3,5 мм требуется усилие около 1300 Н.
Согласно другой идее изобретения предложено сочетание с коробкой передач данного автомобиля электромашины, ротор которой соединен, например, с установленной с возможностью свободного вращения маховой массой, изолируемой для использования колебаний предпочтительно посредством, по меньшей мере, одного сцепления от приводного блока, такого как двигатель внутреннего сгорания, и от ведомого вала, или соединяемой с ней так, что за счет этих устройств возможны гибридные приводы. Коробка передач обеспечивает согласно этому выполнению обширное использование электромашины, например в качестве стартерного блока для двигателя внутреннего сгорания, генератора тока, частичного привода, полного привода, а также в качестве блока преобразования кинетической энергии в электрическую энергию или в кинетическую энергию вращения с использованием ротора в качестве маховой массы при процессах замедления автомобиля при отсоединенном двигателе внутреннего сгорания (рекуперация).
Для этой цели с помощью устройства 18, 44 управления непрерывно, квазинепрерывно, в другом варианте выполнения целесообразным является дискретное вычисление мгновенного значения механической работы. Это осуществляется в предпочтительном варианте выполнения посредством стандартной программы, представленной на фиг.5а. На первом проходе, см. запрос на этапе 502, инициализируют процесс расчета и вычисляют заданную работу, этап 507. На других проходах, запрос на этапе 502, вычисляют на этапе 503 актуальную работу исполнительного устройства. Затем на этапе 504 устанавливают, находится ли актуальная позиция муфты скольжения достаточно близко к целевой точке - на пороге синхронизации. Если это так, то на этапе 505 устанавливают выходные условия - заданное усилие равно синхронизирующему усилию, и покидают программу, в противном случае на следующем этапе 506 происходит вычисление заданного усилия исходя из актуальной позиции по отношению к направляющей кривой на диаграмме 510 скорость-работа (фиг.5с) с учетом характеристики усилие-работа, которую определяют предпочтительно опытным путем, в другом примере выполнения целесообразно с помощью характеристики упругости механизма. Так, с каждым вычислительным проходом исходя из актуального положения - точка на диаграмме 510 скорость-работа (фиг.5с) - определяют заданное усилие для следующего этапа, так что возникает хорошее следование за нужной направляющей кривой 511.
На фиг.5b представлена диаграмма скорость-работа, на которой показаны различные траектории для достижения заданной позиции (позиция синхронизации) с приложением заданного усилия в соответствии с заданной работой ASoll. Границы поля изображены точками, вверх оно определяется максимальным током и максимальным напряжением привода, очень медленные траектории, такие как траектория а, неблагоприятны из-за требуемого времени на создание синхронизирующего усилия, за счет чего поле ограничивается вниз. Желательно при включении следовать за быстрой траекторией, такой как траектория с; форма благоприятной траектории представлена на диаграмме 510 на фиг.5с.
В другом варианте выполнения изобретения управление для установления нужного синхронизирующего усилия (заданного синхронизирующего усилия) осуществляется без использования информации о позиции порога синхронизации. Сам процесс синхронизации и целесообразно также приближение к позиции синхронизации осуществляют с управлением усилием, причем в другом варианте выполнения может быть также целесообразным приближение к позиции синхронизации при управлении скоростью. Для управления усилием в примере выполнения противодействующее приводу усилие оценивают непрерывно, квазинепрерывно, а в другом примере выполнения - целесообразно также дискретно. Для этого за счет управления происходит вычисление с учетом жесткости кинематической цепи между приводом и муфтой скольжения, а также кинетической энергии привода, благодаря чему достигается очень быстрое и точное установление заданного синхронизирующего усилия без избыточного вылета. В частности, устранена необходимость корректировки приводного усилия по достижении позиции синхронизации, с тем чтобы компенсировать неправильную скорость приближения.
Как показано на фиг.6, согласно предпочтительному выполнению противодействующее приводу усилие оценивают путем наблюдения скорости привода, этап 601, и это ответное усилие используют для задания усилия. В соответствии с проверкой на этапе 602 и ответвлением с этапом 604 вычисление заданного усилия осуществляют до тех пор, пока достаточно точно - до FGrenz - не установится нужное синхронизирующее усилие FSync|FSync-Fi|<FGrenz, причем Fi соответствует оцениваемому ответному усилию или скорость |vi| падает ниже значения vGrenz. По достижении одного из этих критериев на этапе 603 устанавливают выходные условия за счет того, что заданное усилие Fi Soll для следующего этапа устанавливают равным нужному синхронизирующему усилию FSync.
Другой предпочтительный пример выполнения изобретения обеспечивает приближение к позиции синхронизации с использованием искусственного демпфирования в приводе за счет того, что приближение к позиции синхронизации и создание синхронизирующего усилия осуществляют исходя из положения А на фиг.2 с управлением усилием, причем для задания заданного усилия Fi Soll привода используют уравнение Fi Soll=Fmax-kvi. Fmax вычисляется как Fmax=FSync/η+FOffset, причем FSync обозначает нужное синхронизирующее усилие на муфте скольжения, η - кпд привода, vi - скорость приближения, a FOffset, k - параметры. Также в этом примере выполнения нужное синхронизирующее усилие устанавливают быстро и без избыточного вылета, причем, в частности, выбор параметра k, который можно назвать также постоянной демпфирования, оказывает существенное влияние, и соответствующая установка этого параметра должна происходить в соответствии с другими величинами.
У коробок передач, передаточные ступени которых включаются посредством муфт переключения, необходимо позиции, например конечных положений передач или порогов синхронизации, ввести в приданную устройству управления память, с тем чтобы гарантировать бесперебойность процессов переключения. На основе обусловленных эксплуатацией изменений в зоне кинематической цепи между муфтой скольжения и приводом, например износа, могут возникнуть отклонения между введенными в память и фактическими позициями, почему необходимо снова адаптировать позиции. Между определенными позициями существует взаимосвязь, т.е. смещение на основе обусловленных эксплуатацией изменений в равной мере сказывается на этих позициях или существует, по меньшей мере, пропорциональная взаимосвязь.
Согласно одному примеру выполнения изобретения, по меньшей мере, временно создают связь между позициями, так что адаптация использует одну позицию также для корректировки другой позиции. Например, адаптация конечных положений передач может быть связана с адаптацией позиции порога синхронизации таким образом, что при осуществленной адаптации одного конечного положения передачи соответственно корректируется также позиция порога синхронизации. Целесообразно эта связь позиций не постоянная, а лишь временная. Например, позиции для адаптации могут быть связаны между собой по истечении заданного времени. Целесообразным в этой связи является время в диапазоне 40-200 часов, в частности 80-100 часов. В другом примере выполнения можно также осуществлять связь чаще, например с интервалом в несколько часов или же несколько раз в час. В другом примере выполнения связь зависит от числа осуществленных адаптации конечных положений передач. Связь возникает целесообразно после определенного числа адаптации конечных положений передач, например после 15-80, в частности после 40-60 адаптации. Целесообразной может быть также связь позиций для совместной адаптации на основе других событий, например трогания автомобиля с места или при остановке автомобиля, например у светофора.
В другом примере выполнения у коробки передач, у которой позиции конечных положений передач введены в приданную устройству управления память, эти позиции конечных положений передач адаптируют во время эксплуатации.
Согласно другой идее изобретения предложено в сочетании с коробкой передач данного автомобиля предусмотреть электромашину, ротор которой соединен, например, с установленной с возможностью свободного вращения маховой массой, изолируемой для использования колебаний предпочтительно посредством, по меньшей мере, одного сцепления от приводного блока, такого как двигатель внутреннего сгорания, и от ведомого вала, или образует ее, так что за счет этих устройств возможны гибридные приводы. Коробка передач обеспечивает, согласно этому выполнению, обширное использование электромашины, например в качестве стартерного блока для двигателя внутреннего сгорания, генератора тока, частичного привода, полного привода, а также в качестве блока преобразования кинетической энергии в электрическую энергию или в кинетическую энергию вращения с использованием ротора в качестве маховой массы при процессах замедления автомобиля при отсоединенном двигателе внутреннего сгорания (рекуперация).
Поданная вместе с заявкой формула изобретения является предложением по ее редакции без ущерба для достижения дальнейшей патентной охраны. Заявитель оставляет за собой право заявить дополнительные совокупности признаков, раскрытые пока только в описании и/или на чертежах.
Использованные в зависимых пунктах подчинения указывают на дальнейшее усовершенствование объекта основного пункта посредством признаков соответствующего зависимого пункта; их не следует рассматривать как отказ от достижения самостоятельной предметной охраны совокупностей признаков подчиненных зависимых пунктов.
Поскольку объекты зависимых пунктов в отношении уровня техники могут образовывать на дату приоритета самостоятельные и независимые изобретения, заявитель оставляет за собой право сделать их объектом независимых пунктов или заявлений о разделении. Они могут содержать также самостоятельные изобретения, имеющие независимую от объектов предыдущих зависимых пунктов форму.
Примеры выполнения не следует понимать как ограничение изобретения. Напротив, в рамках данного раскрытого содержания возможны многочисленные разновидности и модификации, в частности такие варианты, элементы и комбинации и/или материалы, которые, например, за счет комбинации или видоизменения отдельных признаков или элементов или технологических операций, описанных в сочетании с теми, что приведены в общем описании и формах выполнения, а также пунктах формулы и изображенных на чертежах, могут быть взяты специалистом в отношении решения задачи и за счет комбинируемых признаков приводят к новому объекту или новым технологическим операциям или последовательностям технологических операций, также касательно способов изготовления, контроля и технологических процессов.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМОБИЛЬ С КОРОБКОЙ ПЕРЕДАЧ | 2001 |
|
RU2272201C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ СИСТЕМЫ АВТОМОБИЛЯ С ПРИВОДОМ НА ЧЕТЫРЕ КОЛЕСА | 2017 |
|
RU2667420C1 |
| ДИСКОВЫЙ СИНХРОНИЗАТОР | 1996 |
|
RU2137956C1 |
| КОРОБКА ПЕРЕДАЧ | 2002 |
|
RU2278793C2 |
| АВТОМАТИЗИРОВАННАЯ МЕХАНИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ И СПОСОБ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ В КОРОБКЕ ПЕРЕДАЧ | 1994 |
|
RU2116895C1 |
| ПЕРЕКЛЮЧАЮЩИЙ ЭЛЕМЕНТ (ВАРИАНТЫ), ИМЕЮЩИЙ ПО МЕНЬШЕЙ МЕРЕ ТРИ ПОЛОЖЕНИЯ ВКЛЮЧЕНИЯ ДЛЯ ВКЛЮЧЕНИЯ ДВУХ СТУПЕНЕЙ КОРОБКИ ПЕРЕДАЧ | 2008 |
|
RU2469221C2 |
| Способ управления коробкой передач и устройство для его осуществления | 1991 |
|
SU1791174A1 |
| СПОСОБ УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2013227C1 |
| САМОЗАТЯГИВАЮЩИЙСЯ СИНХРОНИЗАТОР | 2016 |
|
RU2627911C1 |
| АВТОМОБИЛЬНАЯ ТРАНСМИССИЯ | 2008 |
|
RU2385436C1 |
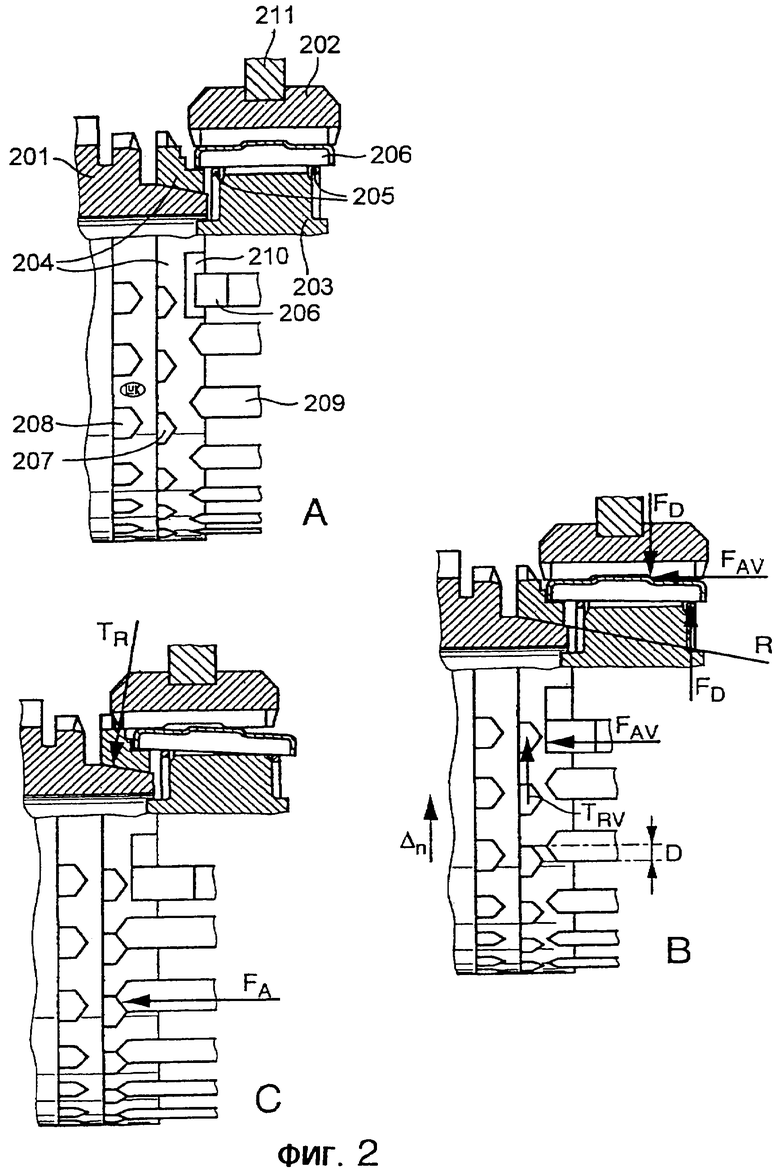
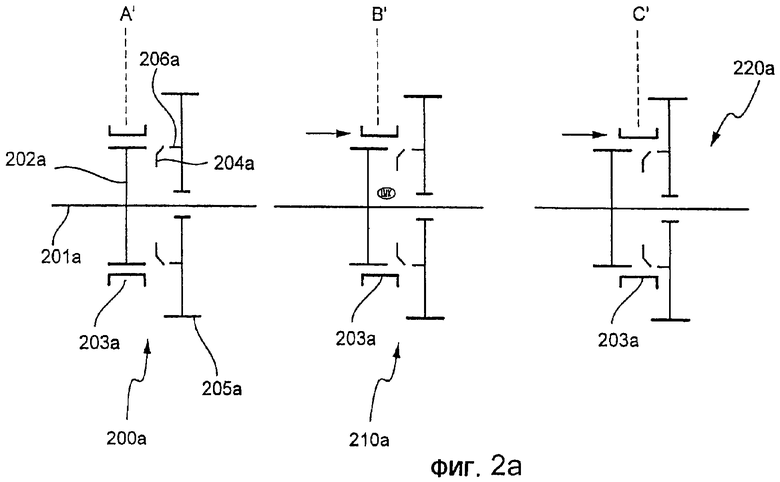
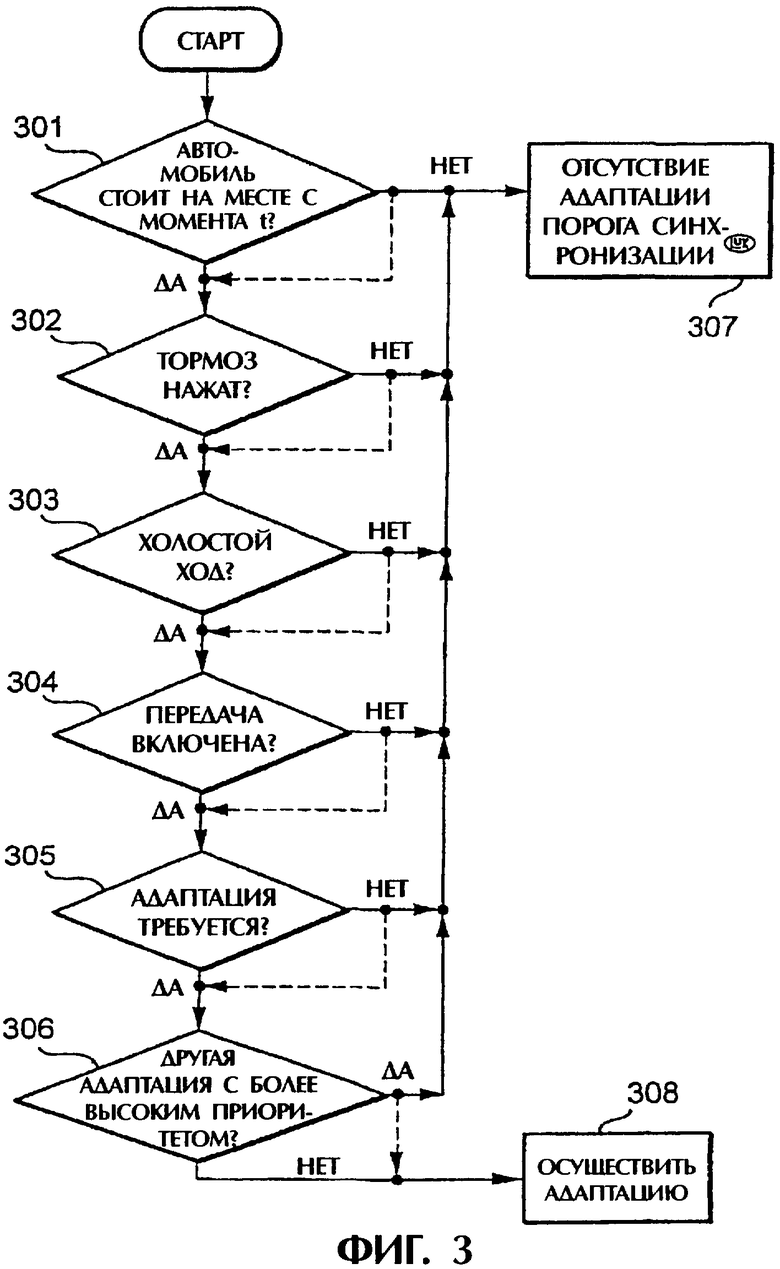
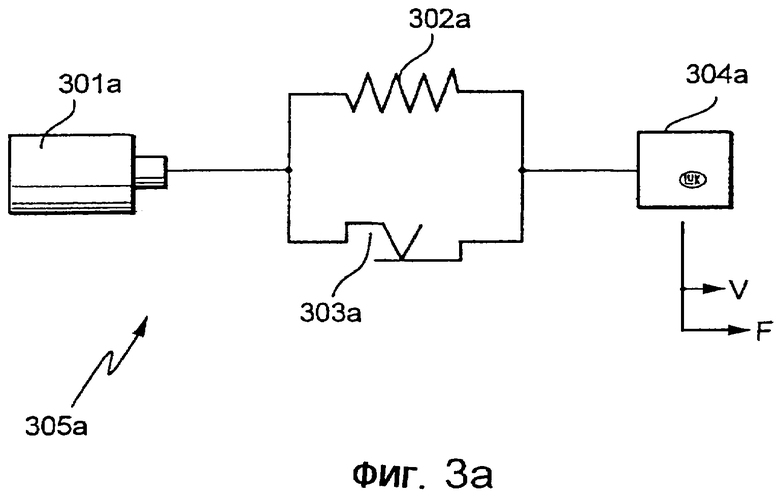
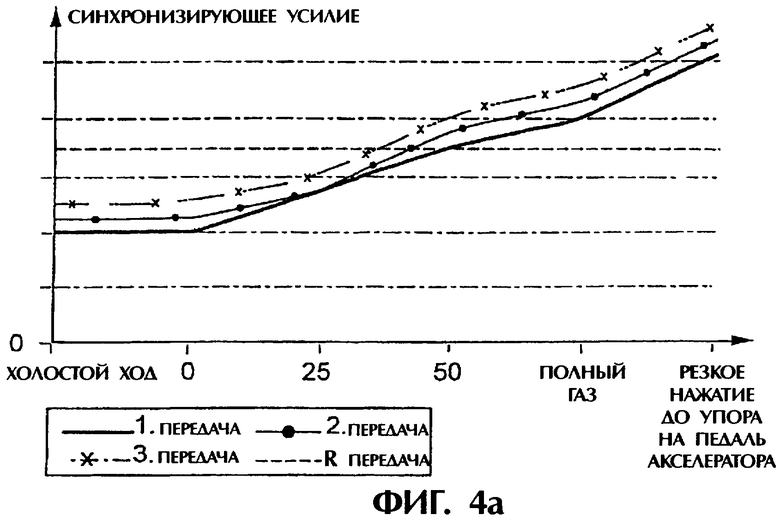
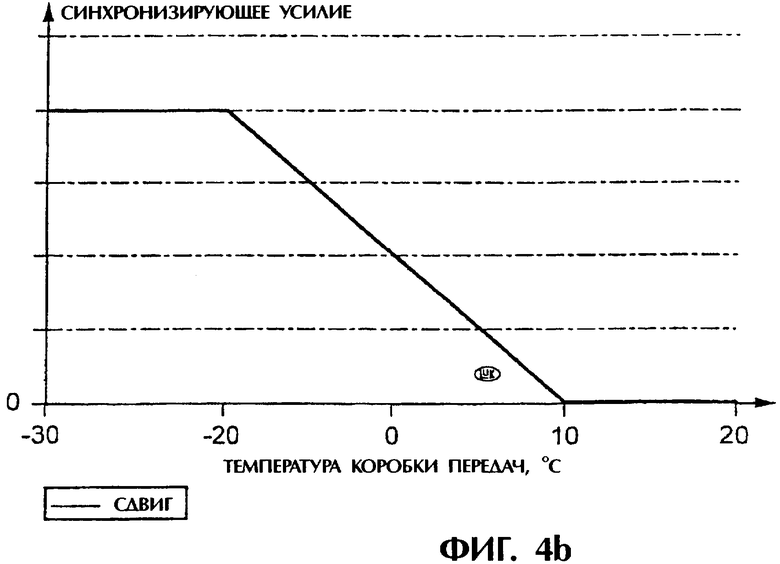
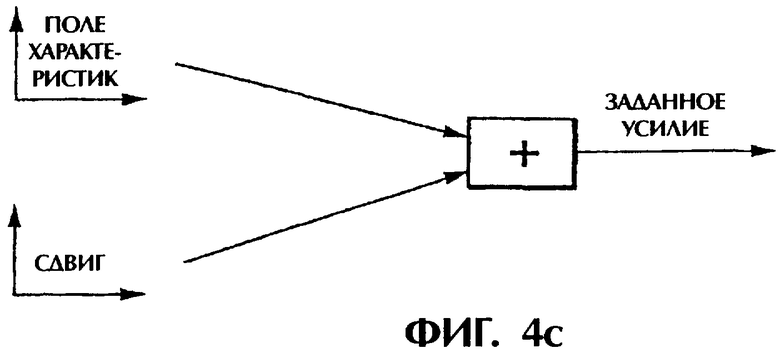
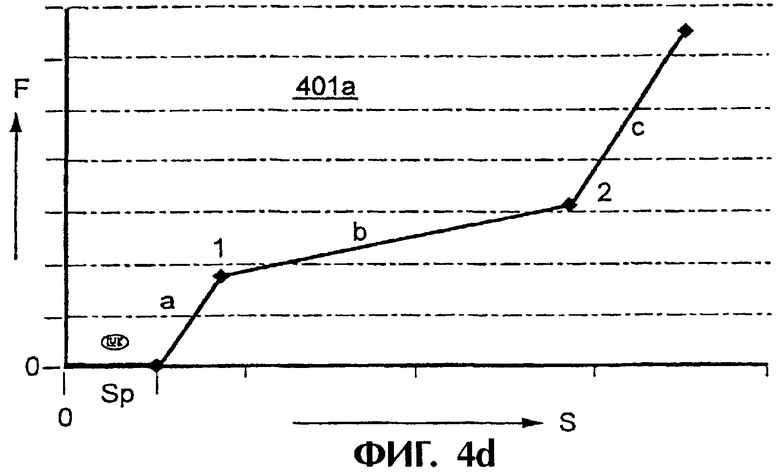
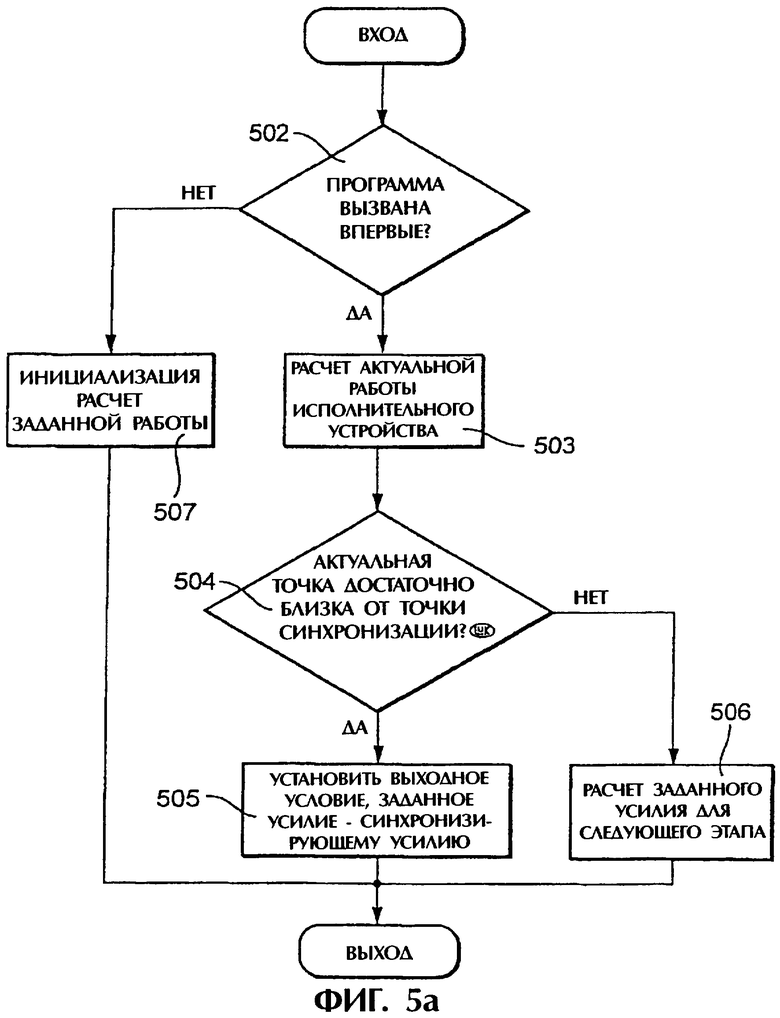
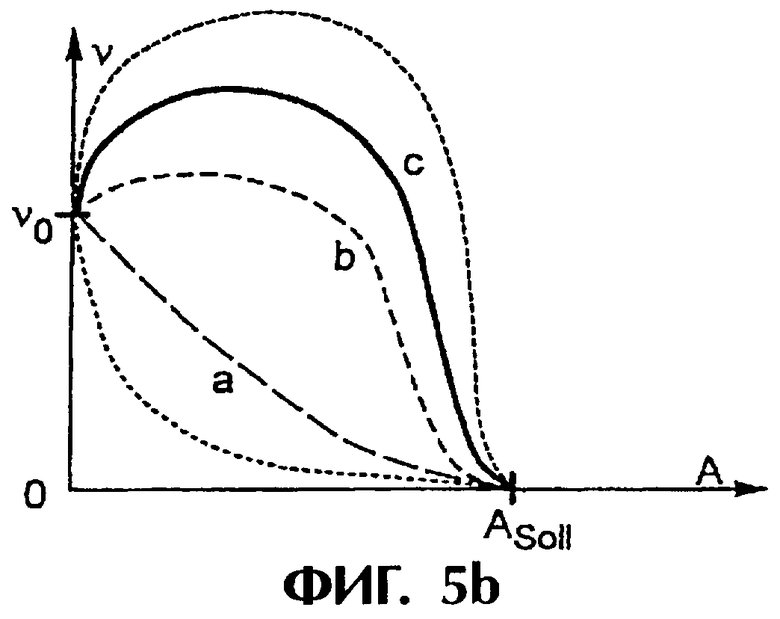
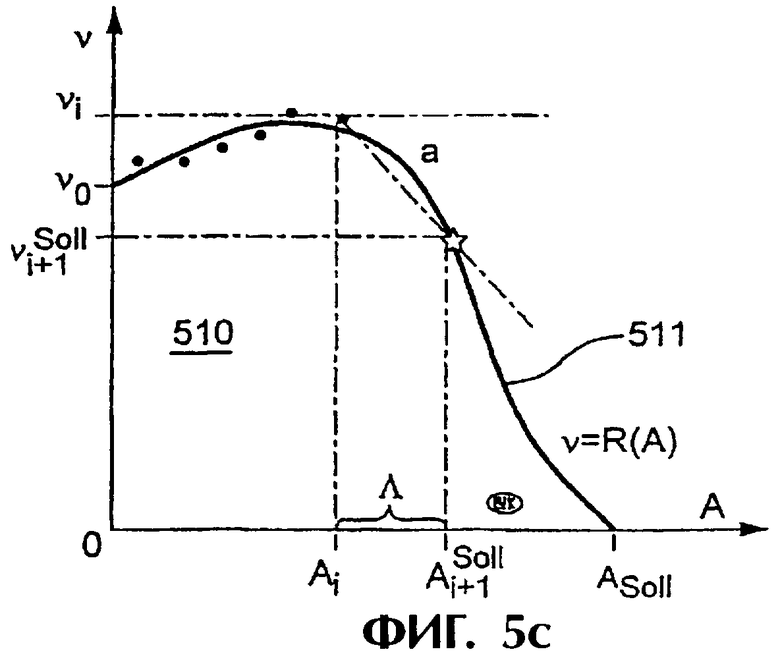
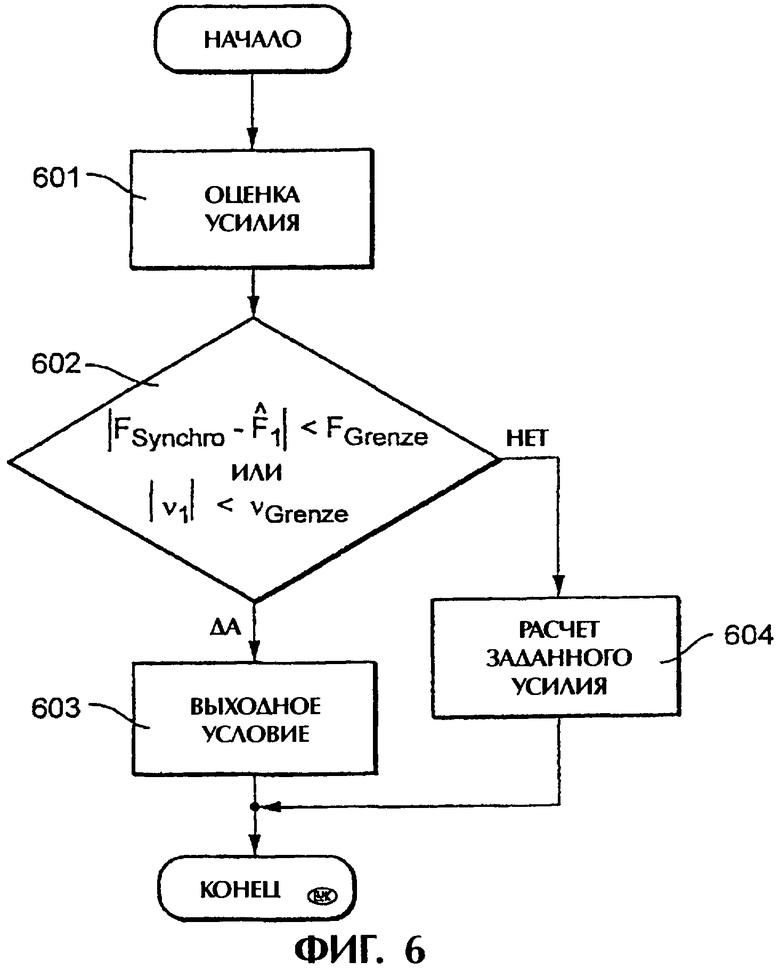
Изобретение относится к автомобилю. Автомобиль содержит приводной двигатель, устройство передачи крутящего момента с первым исполнительным устройством, коробку передач с ведущим и ведомым валами и вторым исполнительным устройством. Коробка передач содержит образующие передаточные ступени блоки шестерен. Первое и второе исполнительные устройства выполнены с возможностью автоматического приведения в действие посредством устройства управления, причем в первом режиме эксплуатации приведение в действие инициируется самопроизвольно устройством управления на основе нескольких входных величин, а во втором режиме эксплуатации приведение в действие осуществляется водителем за счет ввода, причем соединение колеса-каретки, по меньшей мере, одной передаточной ступени с несущим его валом выполнено посредством концевого выходного элемента с синхронизатором. Позиция порога синхронизации, по меньшей мере, одной передаточной ступени сохранена в приданной устройству управления памяти. Кроме того, позиция порога синхронизации может быть адаптирована, причем адаптация порогов синхронизации осуществляется тогда, когда автомобиль стоит на месте, приводной двигатель работает, тормоз нажат и имеется требование к адаптации позиции порога синхронизации. При приближении к позиции порога синхронизации концевого выходного элемента концевого исполнительного механизма коробки передач с инерционной синхронизацией включения осуществляется управление усилием концевого выходного элемента, а позиция синхронизации достигается максимально быстро без перехода за позицию синхронизации. Техническим результатом является улучшение процесса синхронизации. 9 н. и 24 з.п. ф-лы, 6 ил.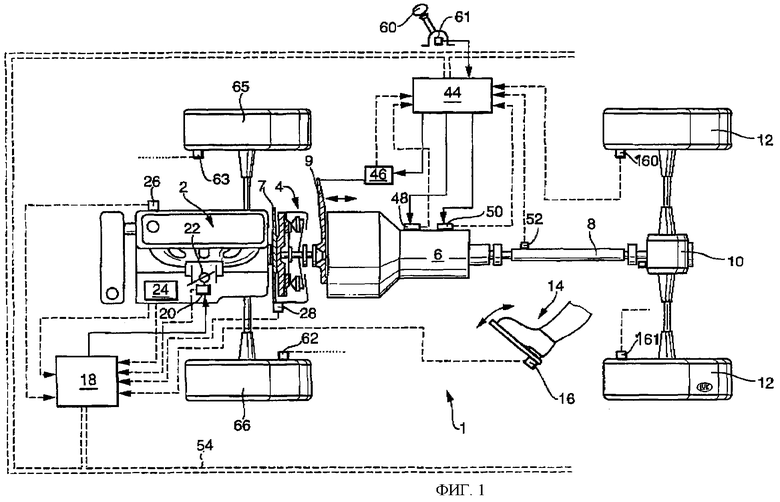
| СПОСОБ ВЫРАБОТКИ КОНСЕРВОВ "СУП ИЗ МИДИЙ" | 2006 |
|
RU2315526C1 |
| СПОСОБ УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2013227C1 |
| Коробка передач | 1975 |
|
SU564473A1 |
| МОЩНЫЙ ГЕНЕРАТОР ПРЯМОУГОЛЬНЫХ ИМПУЛЬСОВ С ТЕПЛОВОЙ СВЯЗЬЮ | 0 |
|
SU373849A1 |

