vj
4
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2013227C1 |
| Устройство дистанционного переключения передач транспортного средства | 1989 |
|
SU1699825A1 |
| САМОЗАТЯГИВАЮЩИЙСЯ СИНХРОНИЗАТОР | 2016 |
|
RU2627911C1 |
| АВТОМОБИЛЬ С КОРОБКОЙ ПЕРЕДАЧ И СПОСОБ ЭКСПЛУАТАЦИИ АВТОМОБИЛЯ | 2001 |
|
RU2289047C2 |
| Устройство дистанционного переключения передач транспортного средства | 1985 |
|
SU1255464A1 |
| СИНХРОНИЗАТОР | 2015 |
|
RU2602642C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКЕ ПЕРЕДАЧ | 2013 |
|
RU2527415C1 |
| АВТОМАТИЗИРОВАННАЯ МЕХАНИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ И СПОСОБ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ В КОРОБКЕ ПЕРЕДАЧ | 1994 |
|
RU2116895C1 |
| СИНХРОНИЗАТОР ВКЛЮЧЕНИЯ ПЕРЕДАЧ СТУПЕНЧАТЫХ ТРАНСМИССИЙ | 2006 |
|
RU2303177C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ СИСТЕМЫ АВТОМОБИЛЯ С ПРИВОДОМ НА ЧЕТЫРЕ КОЛЕСА | 2017 |
|
RU2667420C1 |
Использование: в системах командного и автоматического переключения передач транспортных средств с механической ступенчато трансмиссией. Сущность изобретения: способ основан на коррекции величины и знака момента синхронизации включаемых элементов коробки передач, автоматически изменяющей величину упреждения включения последующей передачи на основании учета рассогласования угловых скоростей синхронизируемых элементов коробки передач предыдущего одноименного переключения «путем введения обратной связи по моменту синхронизации, учитывающей реальные эксплуатационные условия и техническое состояние транспортного средства. Устройство состоит из трехпозиционного силового элемента, электропневматического двухпозиционно- го распределителя, системы воздухопроводов и блока управления. На штоке силового цилиндра жестко установлен в осевом направлении двуплечий рычаг, взаимодействующий с поводком вилки переключения перодач, закрепленной в осевом направлении на штоке. Вилка имеет возможность ограниченного перемещения относительно штока благодаря наличию в ней сквозного паза, выполненного п о дуге окружности. Угловое перемещение ведет к повороту относительно штока двуплечего рычага 6 и осевому перемещению связанного с ним штока. 2 с.п. ф-лы, 4 ил. (Л с х| о
Изобретение относится к транспортному машиностроению, преимущественно к системам командного и автоматического переключения передач в механических трансмиссиях.
Известен способ управления автоматической гидромеханической передачей, у которой переключение достигается благодаря
одновременному или последовательному переключению входящих в механическую часть первой и второй КП. Способ предполагает наличие программы начала переключения второй КП после, начала переключения первой КП, программы окончания переключения второй КП одновременно с завершением переключения
первой КП, а также системы коррекции, принимающей в расчет, по крайней мере, температуру масла в гидросистеме при последующем переключении второй КП на основании результатов существующей схемы переключения передам. Кроме температуры масла в гидросистеме автоматической передачи, в центральном процессоре системы коррекции используются данные, по меньшей мере, одного из параметров: нагрузка двигателя, скорость автомобиля, вид переключения передач.
Недостатком такого способа управления передачей является сложность его осуществления, определяемая введением в конструкцию дополнительных датчиков, что также отрицательно сказывается на надежности .работы.
Известен также способ оптимизации параметров алгоритма переключения передач путем их автоматической адаптации к условиям эксплуатации, весовому состоянию транспортного средства, эксплуатационному состоянию и степени износа двигателя и трансмиссии, в котором относительные угловые скорости синхронизируемых элементов коробки передач не являются жестко заданными константами, а представляют собой функцию .угловых ускорений инерционных масс двигателя и выходного вала коробки передач, передаточного числа КП на включаемой передаче и быстродействия исполнительных механизмов.
В соответствии с предложенным способом реализуется следующая последовательность организации переключения передач (после подачи команды на размыкание сцепления и выключения предыдущей передачи):
считывается и запоминается уровень сигналов датчиков угловой скорости коленчатого вала двигателя и выходного вала КП;
производится задержка времени считывания вышеуказанных сигналов на определенный период;
повторное считывание и запоминание уровня сигналов датчиков угловой скорости коленчатого вала двигателя и выходного вала КП после истечения задержки времени;
определяется приближенное значение угловых ускорений коленчатого вала двигателя и выходного вала КП;
рассчитывается относительная угловая скорость синхронизируемых элементов КП, при достижении которой следует подавать сигнал на включение последующей передачи;
считываются и запоминаются сигналы датчиков угловой скорости коленчатого вала двигателя и выходного вала КП;
определяется действительное значение относительной угловой скорости синхрони-. зируемых элементов КП; .
сравнивается величина действительной относительной угловой скорости синхронизируемых элементов КП с расчетным значением; если величина действительной угловой скорости превышает расчетную, то производится повторное определение
0 очередного действительного значения относительной угловой скорости синхронизируемых элементов, КП, если же величина действительной угловой скорости равна или меньше расчетной, то подается сигнал на
5 включение последующей передачи в КП.
Таким образом, указанный способ оптимизации параметров алгоритма переключения передач основан на последовательном приближении параметров переключения к
0 оптимальным.путем многократных измерений действительных угловых скоростей синхронизируемых элементов КП и их сравнения с расчетными, значения которых . адаптивны к условиям эксплуатации.
5 Недостатком указанного способа оптимизации, параметров алгоритма переключения передач является невозможность учета быстродействия исполнительных механизмов, изменяющегося в зависимости от по0 годно-климатических условий и степени износа.
Известна также автоматическая система управления ступенчатой механической трансмиссией с центральной синхрониза5 цией, в которой включение новой передачи начинается с упреждением при некотором рассогласовании угловых скоростей вводимых в зацепление КП. Величина этого рассогласования определяется временем
0 срабатывания исполнительного механизма КП, мощностными и тормозными характеристиками двигателя, отношением передаточных чисел соседних передач и дорожными условиями. .. 5 . Регистрируемыми системой параметрами являются угловые ускорения коленчатого вала двигателя и выходного вала КП, замеренные в процессе синхронизации, время срабатывания исполнительного механизма
0 КП, при выключении исходной передачи и
отношение передаточных чисел соседних
передач, определяемое номерами исходной
и включаемой передачи в трансмиссии.
Недостатком такой системы управления
5 является отсутствие адаптации к условиям эксплуатации, автоматически меняющей величину упреждения включения последующей передачи в зависимости от угловых ускорений коленчатого вала двигателя и ведомого вала КП в процессе синхронизации,
а также времени срабатывания исполнительного механизма включения передачи, что приводит к увеличению динамических нагрузок в трансмиссии при включении передач, отрицательно сказывается на ее долговечности, а также на технико-экономических показателях .эксплуатации транспортного средства.
Целью изобретения является. повышение надежности и долговечности трансмиссии. .
Для достижения этой цели при первом включении каждой передачи считывают информацию о значении угловых скоростей входного и выходного валов коробки передач, определяют разность между ними и сравнивают ее азаданным значением и при их равенстве подают команду на включение передачи, при этом измеряют синхронизирующий момент, по величине и знаку которого корректируют разность угловых скоростей переключаемых элементов, исходя из минимизации синхронизирующего момента, при последующем включении одноименной передачи считывают упомянутую информацию, определяют разность .угловых скоростей переключаемых элементов, сравнивают со скорректированной разностью и при их равенстве подают команду на включение, затем корректируют раз ность, значение которой используют при последующем одноименном переключении.
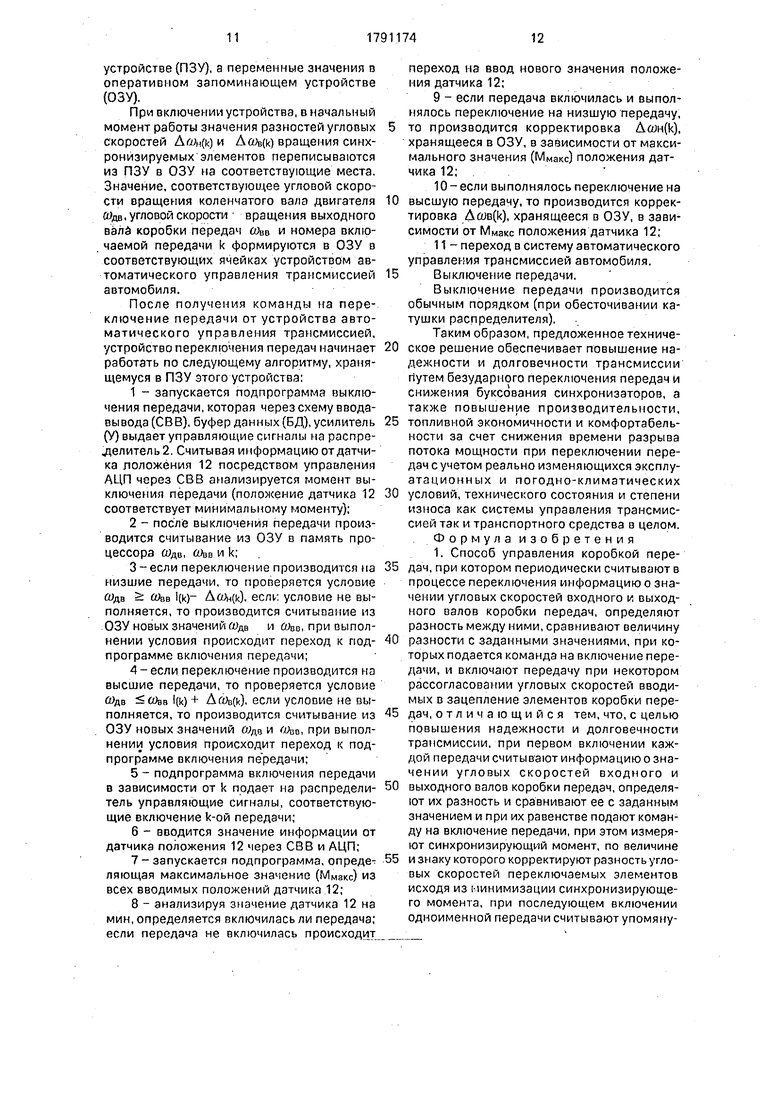
В соответствий с предложенным способом реализуется следующая последовательность выполнения алгоритма переключения передач, (см.фиг.1):
выключается исходная передача, т.е. коробка передач устанавливается в нейтраль, после чего осуществляются операции по синхронизации соединяемых в процессе переключения элементов коробки передач (например, центральная синхронизация при помощи двигателя);
при расчётном рассогласовании угловых скоростей соединяемых в процессе переключения элементов коробки передач Дсо , определяемого с учетом некоторого жестко заданного времени срабатывания исполнительного механизма т. им подается команда на включение требуемой передачи) - зона 1;.
считывается и запоминается значение момента на вилке переключения передач (положение вилки), возникающего за счет трения между вилкой и муфтой синхронизатора коробки передач до его стабилизации на некотором уровне I - зона II;если первоначальное рассогласование угловых скоростей, соединяемых в процессе переключения элементов коробки передач AU) выбрано таким образом, что в момент соприкосновения конусов синхрони- .затора разность угловых скоростей соединяемых в процессе переключения пе-.
5 редач близка к нулю, то блокировка синхронизатора отсутствует и момент на вилке переключения передач не изменяется, в противном случае на вилке переключения передач возникает дополнительный (поло10 жительный или отрицательный) синхронизирующий момент -зона 111, значение которого (дополнительное отклонение вилки - А) регистрируется и запоминается блоком управления:
15 после завершения процесса синхронизации соединяемых в процессе переключения элементов происходит разблокировка синхронизатора и Дополнительный момент на вилке переключения передач (до20 полнительное отклонение вилки - AI) исчезает и происходит-замыкание зубчатой муфты - зона IV, т.е. включение требуемой передачи;
наличие величины и знака дополнитель5 ного синхронизирующего момента на вилке переключения передач (дополнительного отклонения вилки - А I) учитывается при последующем включении этой передачи таким образом, что при отсутствии дополни0 .тельного синхронизирующего момента . (дополнительного отклонения вилки АI) расчетное рассогласование соединяемых в процессе переключения передач элементов коробки передач изменяется, в про5 тивном случае значение этого рассогласования увеличивается или уменьшается в зависимости от направления (знака) допол- 1 нительного синхронизирующего момента (дополнительного .отклонениявилки-АI)до
0 значения : Дй/ и выполняется последовательность операций, описанная выше);
если при последующем включении данной передачи в момент соприкосновения конусов синхронизатора коробки передач
0 -Д11);
последовательно ведется коррекция рассогласования До , при котором подает- . ся команда на включение данной передачи до тех пор, пока дополнительный синхрони- 5 зирующий момент (дополнительное отклонение вилки - Д I) не будет устранено, т.е. до-тех пор, пока момент замыкания зуб ча- той муфты не совпадает с моментом выра в- . нивания угловых скоростей соединяемых в
процессе переключения элементов коробки передач:
дальнейшее включение данной передачи происходит при полученном вышеописанным способом рассогласования угловых скоростей соединяемых в процессе переключения элементов коробки передач, например Дг .
Таким образом, указанный способ управления коробкой передач основан на постепенном приближении параметров переключения к оптимальным, путем коррекции констант последующего переключения на основании реальных их значений одноименного предыдущего переключения, зависящих от условий эксплуатации и технического состояния транспортного средства.
Для осуществления этого способа предложено устройство.
Известен электропне.вматический привод управления муфтой синхронизатора коробки передач, который предотвращает повреждение шлицео муфты и шестерни при соединении последней с валом, что достигается временным снижением переключающего усилия в пневмоприводе после завершения синхронизации шестерни и вала и последующем плавным вводом шлицев в зацепление. При достижении равенства теоретического и действительного соотношения частот вращения первичного и промежуточного валов коробки передач во время завершения синхронизации производится пуск реле времени в блоке управления, что приводит к включению на определенное время электромагнитного клапана, связанного с переключающим пневмоцилиндром. Следовательно, производится выпуск сжатого воздуха из пневмо- цилиндра, и переключающее усилие его штока резко снижается, Вслед за этим производится плавный ввод в зацепление шлицев муфты и шестерни.
Недостатком такого привода является то, чтб он не уменьшает буксование синхронизаторов, а только обеспечивает плавный ввод в зацепление шлицев муфты и шестерни после завершения синхронизации переключаемых элементов коробки передач.
Известно также устройство дистанционного переключения передач транспортного средства, в котором с целью упрощения конструкции и .повышения надежности работы путем бесступенчатого изменения усилия включения передач оно содержит автоматически управляемый дроссель,, выполненный в виде подпружиненного золотника с пояском, пневматически связанный с рабочими полостями
силового цилиндра через распределитель и кинематически взаимодействующий через двуплечий рычаг, установленный на штоке силового цилиндра, с поводком
вилки переключения передач, причем вилка установлена на штоке коробки передач с возможностью относительного углового перемещения.
Недостатком такого устройства, опре0 деляемым необходимостью введения бесступенчатого изменения усилия включения передач, является устранение не причины возникновения повышенного усилия вклю- чения, вызванного жестко заданными точка5 ми переключения передач, а следствия, т.е. сведения к минимуму буксования синхронизаторов коробки передач из-за наличия рассогласования углов.ых скоростей переключаемых элементов.
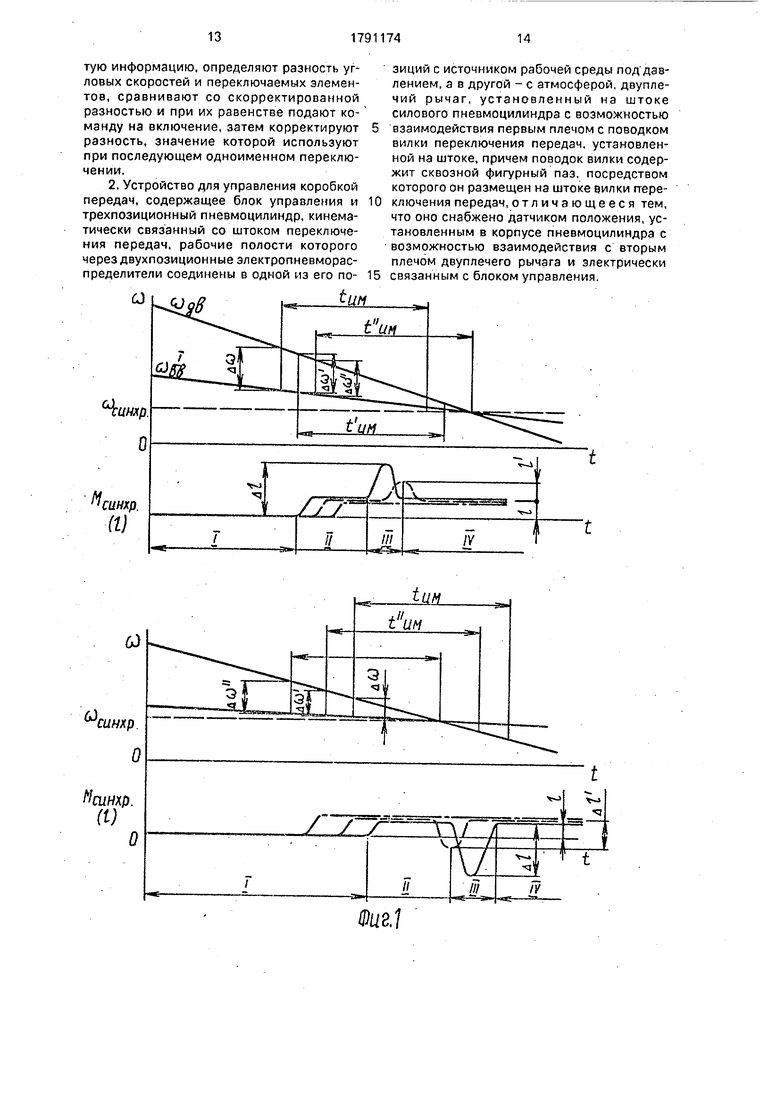
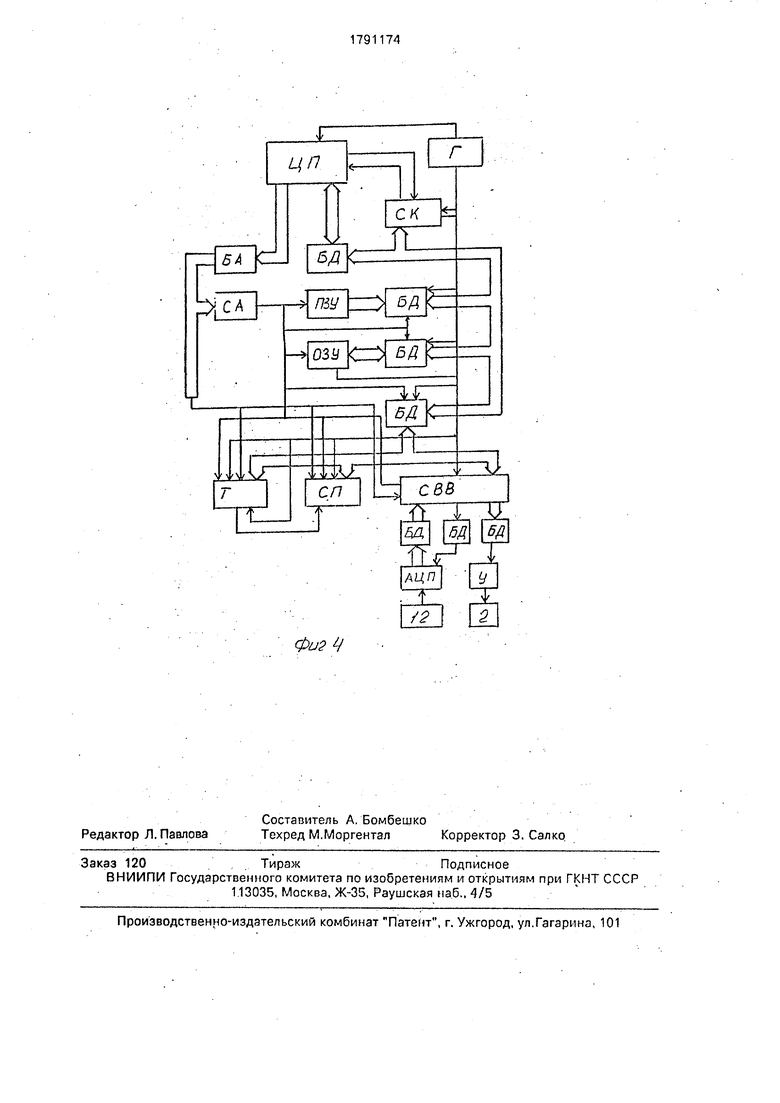
0 На фиг,2 показана принципиальная электропневматическая схема устройства переключения передач; на фиг.З - вариант конструктивного исполнения механизма обратной связи; на фиг.4 - блок управления.
5 Устройство состоит из исполнительного механизма 1 и распределителей 2, соединенных между собой системой воздухопроводов 3 и блока управления 4. Исполнительный механизм представляет
0 собой трехпозиционный силовой элемент с пневматической нейтралью. Электропневматический распределитель состоит из электромагнита с толкателем и нормально, открытого золотникового клапана. На штоке
5 5 силового элемента жестко установлен о осевом направлении двухплечий рычаг 6, взаимодействующий с поводком вилки 7 переключения передач, закрепленной в осевом направлении с помощью стопорных
0 колец и шайб на штоке 8, установленном в крышке или картере 9 коробки передач. Вилка 7 имеет возможность ограниченного перемещения относительно штока. 8 благодаря наличию в ней сквозного паза 10, вы5 полненного по дуге окружности. В корпусе силового элемента установлен датчик положения 12, подвижная часть которого связана со штоком 13. Среднее (нейтральное) положение штока 13 обеспечивается пружи0 ной 14, шайбами 15 и крышкой 16. Шток 13 кинематически взаимодействует с двупле- чим рычагом 6 через шип 17.
Распределители 2 и датчик положения 12 связаны с блоком управления 4. Блок уп5 равления 4 содержит (фиг.4) центральный процессор (ЦП), генератор синхроимпульсов (Г), системный контроллер (СК), постоянного запоминающего устройства (ПЗУ), оперативного запоминающего устройства ШУ), программируемого таймера (Т), схемы приоритетных прерываний (СП), схемы ввода-вывода (СВВ) аналоге- цифрового преобразования (АЦП), усилителя (У), электрически соединенных между собой в соответствии со схемой, приведенной на фиг.4.
Устройство работает следующим образом.
Исходное положение (нейтраль в коробке передач).
Для обеспечения исходного положения воздух под давлением через воздухопроводы 3 (при обесточенных магнитах распределителя) беспрепятственно поступает в рабочие поло сти трехпозиционного силового элемента Т, устанавливая тем самым шток 5, рычаг б и связанную с ним вилку 7 со штоком 8 коробки передач в нейтральное положение (в осевом направлении). Трение между концами вилки и вращающейся муфтой синхронизатора отсутствует, благодаря чему с помощью пружины 14 шток 13 устанавливается в среднее (нейтральное) положение относительно датчика 12 и через шип 17 и рычаг 6 устанавливает в среднее (нейтральное) положение (в тангенциальном направлении) вилку 7 относительно штока 8.
б. Включение передачи.
Первое включение каждой передачи в коробке передач производится при жестко заданном рассогласовании угловых скоростей соединяемых в процессе переключения элементов коробки передач - ,
При подаче питания на соответствующий электромагнит срабатывает исполнительный механизм, что приводит к перемещению штока 5, рычага б и связанного с ним штока 8 с вилкой 7 коробки передач.
Перемещение вилки 7 в осевом направлении вызывает появление момента трения между концами вилки и вращающейся муфтой синхронизатора, что приводит к угловому перемещению вилки 7 относительно штока 8 благодаря наличию в ней сквозного паза 10, а следовательно и к пропорциональному данному моменту трения перемещению штока датчика 12.
Направление углового перемещения вилки 7 зависит от соотношения угловых скоростей ведущей и ведомой частей синхронизатора, т.е. от необходимости разгонять или тормозить ведомые элементы коробки передач (см. зона III на фиг.1).
Угловое перемещение вилки 7 ведет к повороту относительно штока 5 двуплечего рычага 6 и осевому перемещению связанного с ним штока 13. Смещение штока 13 возможно при условии, что момент трения вилки и-муфты синхронизатора больше усилия пружины 14. Перемещение штока 13
приводит к аналогичному перемещению датчика положения 12.
Величина углового пёрёмёЩенШ вШкй 7 и связанного с ней штока 13 определяется 5 моментом трения между вилкой и муфтой синхронизатора, величина к бт орбго является переменной по ходу штока включения передачи (см.фиг.1).
Наибольшее значение момента на вил0 ке 7 имеет место в момент синхронизации скоростей вращения соединяемых в процессе переключения элементов коробки передач (см. зона III на фиг.1).
Наиболее оптимальным вариантом яв5 ляётся переключение с отсутствием буксования синхронизатора, т.е. отсутствием зоны III на фиг.1.
Предложенный способ и устройство обеспечивают оптимизацию параметров пе0 реключения передач путем регистрации и хранения в памяти блока управления 4 величины перемещения штока 13, пропорционального моменту на вилке 7 при настоящем переключении передачи и его уменьшения
5 (или исключения) при последующем одноименном переключении путем коррекции величины рассогласования угловых скоростей ведущих и ведомых частей коробки передач До с учетом реального воздействия
0 (t и.м.) исполнительного механизма.
Для реализации данного способа в устройстве имеется блок управления 4. Информация от датчика положения 12 через аналого-цифровой преобразователь (АЦП),
5 буфер данных (БД), схему ввода-вывода (СВВ) поступает в центральный процессор. Интенсивность поступления сигнала отдатчика положения 12 управляется через таймер (Т). Управление временными
0 интервалами осуществляется также через таймер (Т).
Селектор адреса (СА) позволяет организовать обращение к необходимым устройствам. Системный контроллер (СК) управляет
5 обменом информации между устройствами. Генератор синхроимпульсов (Г) необходим для синхронизации работы всех систем и получения точных временных интервалов. Буфер адреса (БА) служит для усиления зд0 ресного сигнала. Буферы данных (БД) служат для усиления сигналов данных и управления направлением их передачи. Схема приоритетных прерываний (СП) служит для организации приема данных с ми5 нимальной потерей точности. Усилитель (У) служит для усиления управляющих сигналов на распределителе 2.
Программа, отражающая алгоритм работы устройства по данному способу, нахо- дится в постоянном запоминающем
устройстве (ПЗУ), а переменные значения в оперативном запоминающем устройстве (ОЗУ).
При включении устройства, в начальный момент работы значения разностей угловых скоростей Дй-ад и Лоад вращения синхронизируемых элементов переписываются из ПЗУ в ОЗУ на соответствующие места. Значение, соответствующее угловой скорости вращения коленчатого вала двигателя Шдв, угловой скорости вращения выходного вала коробки передач %в и номера включаемой передачи k формируются в ОЗУ в соответствующих ячейках устройством автоматического управления трансмиссией автомобиля.
После получения команды на переключение передачи от устройства автоматического управления трансмиссией, устройство переключения передач начинает работать по следующему алгоритму, хранящемуся в ПЗУ этого устройства:
1 - запускается подпрограмма выключения передачи, которая через схему ввода- вывода (СВВ), буфер данных (БД), усилитель (У) выдает управляющие сигналы на распределитель 2. Считывая информацию отдатчика положения 12 посредством управления АЦП через СВВ анализируется момент выключения передачи (положение датчика 12 соответствует минимальному моменту);
2 - после выключения передачи производится считывание из ОЗУ в память процессора О)дВ, УВВ и k;
3 - если переключение производится на низшие передачи, то проверяется условие О)дв Ј: (Увв i(k}- Лац|), если условие не выполняется, то производится считывание из ОЗУ новых значений и , при выполнении условия происходит переход к под- программе включения передачи;
4-если переключение производится на высшие передачи, то проверяется условие идв l(k) + Afttyk), если условие не выполняется, то производится считывание из ОЗУ новых значений и %0, при выполнении условия происходит переход к подпрограмме включения пе редачи;
5 - подпрограмма включения передачи в зависимости от k подает на распредели- тель управляющие сигналы, соответствующие включение k-ой передачи;
6 - вводится значение информации от датчика положения 12 через СВВ и АЦП;
7 - запускается подпрограмма, опреде- ляющая максимальное значение (Ммакс) из всех вводимых положений датчика 12;
8 - анализируя значение датчика 12 на мин, определяется включилась ли передача; если передача не включилась происходит
переход на ввод нового значения положения датчика 12;
9 - если передача включилась и выполнялось переключение на низшую передачу, то производится корректировка Дсон(к), хранящееся в ОЗУ, в зависимости от максимального значения (Ммакс) положения датчика 12;
10-если выполнялось переключение на высшую передачу, то производится корректировка Дшв(к), хранящееся в ОЗУ, в зависимости от Ммакс положения датчика 12;
11 - переход в систему автоматического управления трансмиссией автомобиля.
Выключение передачи.
Выключение передачи производится обычным порядком (при обесточивании катушки распределителя).
Таким образом, предложенное техническое решение обеспечивает повышение надежности и долговечности трансмиссии путем безударного переключения передач и снижения буксования синхронизаторов, а также повышение производительности, топливной экономичности и комфортабельности за счет снижения времени разрыва потока мощности при переключении передач с учетом реально изменяющихся эксплу- атационных и погодно-климатических условий,технического состояния и степени износа как системы управления трансмиссией так и транспортного средства в целом.
Формула изобретения
зиций с источником рабочей среды под давлением, а в другой - с атмосферой, двупле- чий рычаг, установленный на штоке силового пневмоцилиндра с возможностью взаимодействия первым плечом с поводком вилки переключения передач, установленной на штоке, причем поводок вилки содержит сквозной фигурный паз, посредством которого он размещен на штоке вилки переключения передач, отличающееся тем, что оно снабжено датчиком положения, установленным в корпусе пневмоцилиндра с возможностью взаимодействия с вторым плечом двуплечего рычага и электрически связанным с блоком управления.
ФигЛ
Ш1611
Фи2 Ч
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Руктешель О.С | |||
| Автореф | |||
| докт | |||
| дисс | |||
| Минск, 1987, Белоус М.М | |||
| Автореф | |||
| канд | |||
| дисс | |||
| Минск, 1982 | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Устройство дистанционного переключения передач транспортного средства | 1989 |
|
SU1699825A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
