Способ автоматического переключения передач и устройство переключения относятся к системам автоматического или командного переключения передач транспортных средств с механической трансмиссией.
Известен также способ регулирования давления в автоматической трансмиссии легкового автомобиля с электронной системой автоматического управления, обеспечивающий автоматическое приспособление характеристик включения фрикционов к различным модификациям ДВС и автомобилей. Программа управления, заложенная в постоянную память, анализирует три первых включения передач после сборки автомобиля, определяет разницу между желаемым и фактическим темпом падения частоты вращения барабана одного из дисковых тормозов и в зависимости от этой разницы определяет нужную величину начального давления в гидроцилиндре, которая запоминается и используется в дальнейшем. Давление регулируется золотниковым регулятором, управляемым посредством пилотного электромагнитного клапана, работающего в циклическом режиме. В результате ГМП без изменения элементов гидросистемы, регулирующих величину и темп нарастания давления, может использоваться в ДВС разного рабочего объема и скоростного диапазона, что упрощает массовое автоматизированное производство, повышает комфортабельность и снижает динамические нагрузки [1] .
Недостатком такое способа управления является отсутствие адаптации системы управления к изменяющемуся по мере приработки и износа техническому состоянию как самого механизма управления, так и трансмиссии транспортного средства, а также к условиям эксплуатации, что отрицательно сказывается на долговечности трансмиссии.
Целью изобретения является повышение долговечности трансмиссии и системы управления путем поддержания режима оптимальной синхронизации переключаемых элементов коробки передач.
Для достижения этой цели регистрируют и запоминают информацию о характере перемещения элементов привода коробки передач по условиям блокирования синхронизатора в ходе предыдущего включения каждой передачи, определяют номер включенной передачи и направление последующего переключения, с учетом чего производят предварительное регулирование давления рабочей среды в исполнительных механизмах переключения передач (в сторону уменьшения или увеличения), чем обеспечивают адаптацию переключения передач к техническому состоянию трансмиссии и механизма переключения и эксплуатационным условиям.
Известен синхронизатор инерционного типа коробки передач, обеспечивающий постоянство интенсивности синхронизации, не зависящее от создаваемого водителем усилия на рычаге переключения передач. Для этого на фрикционных кольцах предусмотрены скошенные к продольной плоскости поверхности, взаимодействующие с соответствующими им поверхностями на муфте каретки. Фрикционные кольца имеют конические поверхности, при соприкосновении которых с соответствующими поверхностями на включаемых шестернях возникает синхронизирующий момент трения. Этот момент передается на скошенные поверхности фрикционного кольца, создавая аксиальные усилия, прижимающие фрикционное кольцо к включаемой шестерне. Этот развивающийся прогрессивно процесс синхронизации происходит независимо от действий водителя после того, как он переместил каретку синхронизатора до соприкосновения фрикционного кольца с включаемой шестерней (заявка ФРГ N 3732525).
Недостатком указанного устройства является невозможность изменения величины момента синхронизации в зависимости от эксплуатационных условий и технического состояния транспортного средства.
Известно также устройство дистанционного переключения передач транспортного средства, в котором с целью упрощения конструкции и повышения надежности работы устройства путем бесступенчатого изменения усилия включения передач оно содержит автоматически управляемый дроссель, выполненный в виде подпружиненного золотника с пояском, пневматически связанный с рабочими полостями силового цилиндра через распределитель и кинематически взаимодействующий через двуплечий рычаг, установленный на штоке силового цилиндра, с поводком вилки переключения передач, причем вилка установлена на штоке с возможностью относительного углового перемещения [2] .
Недостатком такого устройства, определяемым необходимостью введения бесступенчатого изменения усилия включения передач, является устранение не причины возникновения повышенного усилия включения, вызванного жестко заданными точками переключения передач, а следствия, т. е. сведения к минимуму буксования синхронизаторов коробки передач из-за наличия неоптимального рассогласования частот вращения переключаемых элементов, изменяющегося в процессе эксплуатации транспортного средства.
Цель предлагаемого способа - обеспечение режима оптимальной синхронизации переключаемых элементов коробки передач на основании регистрации и запоминания информации о характере перемещения элементов привода коробки передач по условиям блокирования синхронизатора в ходе предыдущего включения каждой передачи путем предварительного регулирования давления рабочей среды в исполнительных механизмах переключения передач перед последующим одноименным переключением с учетом изменяющихся технического состояния трансмиссии и механизма управления (приработка, износ) и эксплуатационных условий (температура наружного воздуха, трансмиссии и др. ).
При осуществлении предлагаемого способа переключения передач реализуется следующая последовательность операций (после выключения сцепления):
- первоначальное включение каждой передачи производит с определенным наперед заданным давлением для каждой передачи;
- в процессе последующего включения каждой передачи по перемещению штока исполнительного механизма коробки передач определяют и запоминают условия блокирования-разблокирования синхронизатора с первоначальным уровнем давления в исполнительных механизмах коробки передач;
- анализируют полученную информацию на предмет наличия блокирования-разблокирования, отсутствия "пробоя" синхронизатора каждой передачи с первоначальным уровнем давления в исполнительных механизмах коробки передач;
- в случае отсутствия разблокировки синхронизатора производят увеличение давления в исполнительном механизме коробки передач для обеспечения включения данной передачи;
- определяют номер включенной передачи и направление последующего переключения;
- с учетом информации о предыдущем включении данной передачи, в случае отсутствия разблокирования синхронизатора или слишком растянутого по времени процесса синхронизации в процессе переключения элементов трансмиссии производят увеличение давления в исполнительных механизмах коробки передач, а в случае наличия "пробоя" синхронизатора при предыдущем включении данной передачи производят его снижение; при наличии условий оптимальной синхронизации при предыдущем одноименном включении выставляется такое же давление;
- включают передачу, после чего проверяют новые условия блокирования-разблокирования синхронизатора и выполняют всю последовательность предусмотренных предлагаемым способом операций.
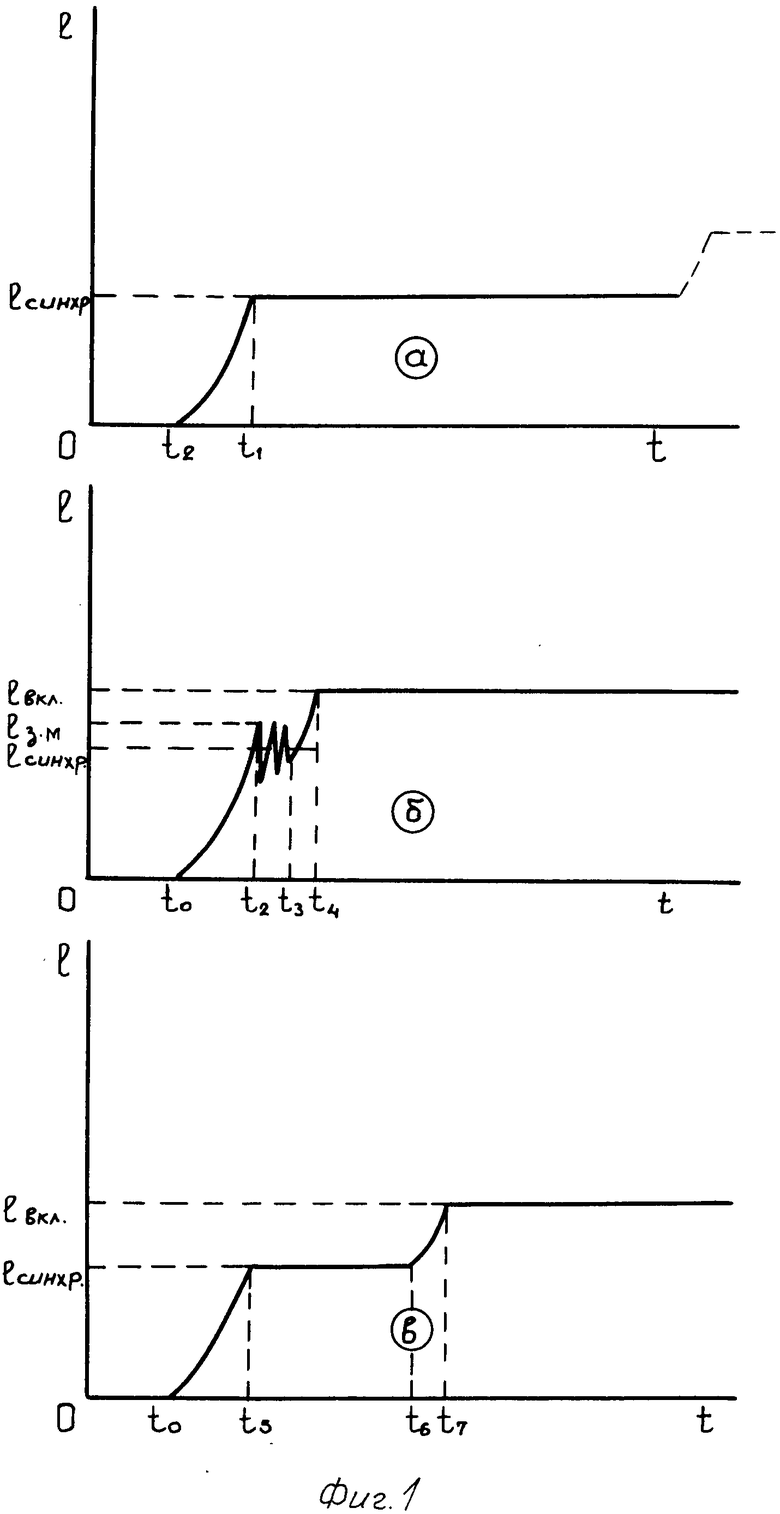
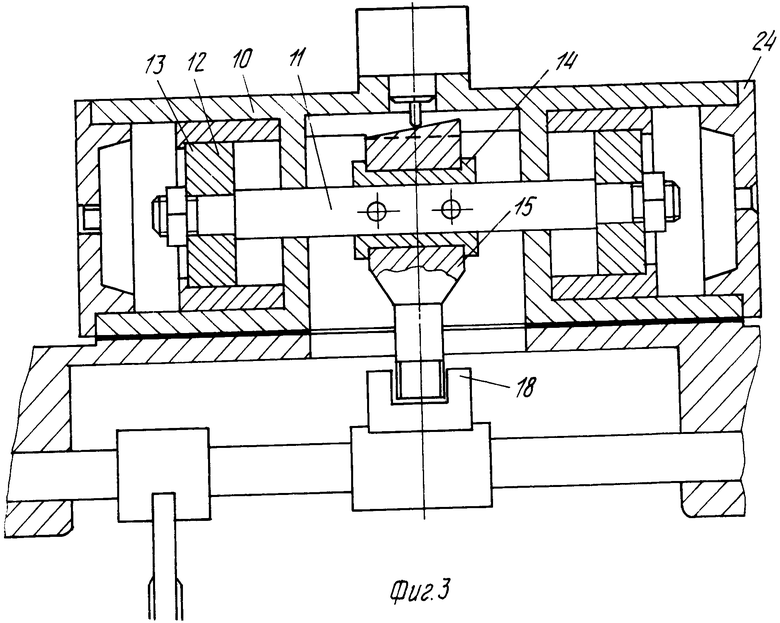
На фиг. 1 представлены временные характеристики перемещения синхронизируемых элементов коробки передач в зависимости от давления энергоносителя в исполнительных механизмах переключения передач; на фиг. 2 - электропневматическая схема предлагаемого устройства; на фиг. 3 и 4 - варианты его конструктивного исполнения; на фиг. 5 - электрическая схема микропроцессорного контроллера.
В соответствии с фиг. 1 возможны следующие варианты синхронизации переключаемых элементов:
а) синхронизация с недостаточным усилием включения (давлением рабочей среды в исполнительных механизмах). В этом случае происходит перемещение каретки синхронизатора О-lсинхр за время to-t1 до соприкосновения конусов синхронизатора и дальнейшее перемещение (синхронизация) либо затягивается по времени, либо не происходит вовсе, т. е. включение передачи не произойдет. Для оптимизации режима синхронизации необходимо увеличить давление рабочей среды в исполнительном механизме коробки передач;
б) синхронизация с повышенным усилием включения. В этом случае также происходит перемещение каретки синхронизатора О-lсинхр за время to-t2 до соприкосновения конусов синхронизатора, затем происходит "пробой" синхронизатора и имеет место колебательный процесс перемещения включаемых элементов с быстрым завершением включения передач в точке t4. Для оптимизации режима синхронизации необходимо уменьшить давление рабочей среды в исполнительных механизмах коробки передач.
в) синхронизация с нормальным усилием включения. В этом случае также происходит перемещение каретки синхронизатора О-lсинхр за время to-t5, затем происходит синхронизация переключаемых элементов за оптимальное время t5-t6 и включение зубчатой муфты синхронизатора lсинхр. -lвкл. за время t6-t7. В этом случае происходит переключение передач в режиме оптимальной синхронизации переключаемых элементов коробки передач, что положительно сказывается на долговечности трансмиссии и механизма переключения.
Устройство переключения передач включает в себя анализирующий управляющий блок 1, механизм 2 переключения, блок 3 электропневматических клапанов, датчик 4 скорости транспортного средства, датчик 5 положения переключаемых элементов коробки передач, датчик 6 давления воздуха в исполнительных механизмах, регулятор 7 давления и систему электрических 8 и пневматических 9 приводов.
Анализирующий управляющий блок выполнен на базе серийного микропроцессорного контроллера, например "Электроника МС 2702", и содержит центральный процессор (ЦП), генератор синхроимпульсов (Г), системный контроллер (СК), буфер адреса (БА), буфера данных (БД), селектор адреса (СА), постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ), программируемый таймер (Т), схему приоритетных прерываний (СП), усилитель (У), электрически соединенные между собой в соответствии со схемой, приведенной на фиг. 5.
Механизм переключения представляет собой перекрестно расположенные трехпозиционные силовые элементы выбора и включения передач с пневматической нейтралью и состоит из корпуса 10, в расточках которого установлены шток 11 с жестко закрепленными поршнями 12 и плавающими поршнями 13. На штоке 11 через направляющую 14 установлен рычаг 15 с возможностью попеременного кинематического взаимодействия через шип 16 с поводками 17, 18 и 19 вилок переключения передач. В перпендикулярном направлении к штоку 11 в расточке корпуса 10 установлены плавающие поршни 20 и шток-поршни 21 выбора передач, взаимодействующие с боковыми торцами рычага 15. В корпусе 10 установлен датчик 22 линейного перемещения, подвижная часть которого взаимодействует с наклонной поверхностью 23 рычага 15. На торцах корпуса 10 исполнительного механизма установлены крышки 24 с отверстиями для подвода рабочей среды.
Устройство работает следующим образом.
Исходное положение (нейтраль в коробке передач).
Для обеспечения исходного положения воздух под давлением через приводы 9 и блок 3 электропневматических клапанов (при обесточенных электромагнитах) беспрепятственно поступает в рабочие полости трехпозиционных силовых элементов, устанавливая тем самым штоки 11 и 21 и связанный с ними рычаг 15 в нейтральное положение.
Включение передачи.
Первоначальное включение каждой передачи производят с определенным наперед заданным давлением для каждой передачи. Давление регистрируется в анализирующем блоке 1 с помощью датчика 6 давления. При подаче питания на соответствующие электромагниты срабатывает исполнительный механизм, что приводит к перемещению штока 21 в направлении выбора включаемой передачи и штока 11 и связанных с ним рычага 15 и одного из поводков, например 17, вилки на включение соответствующей передачи.
Блок 1 управления анализирует и запоминает информацию по перемещению рычага 15 с помощью датчика 5 положения на предмет наличия блокирования или "пробоя" синхронизатора с первоначальным уровнем давления в исполнительных механизмах коробки передач. В случае отсутствия разблокирования синхронизатора блок 1 выдает команду на увеличение давления для обеспечения включения данной передачи.
При последующем включении одноименной передачи учитывается информация предыдущего включения и в случае отсутствия разблокирования синхронизатора или слишком растянутого по времени процесса синхронизации производится увеличение давления с помощью регулятора 7 давления, а в случае наличия "пробоя" синхронизатора - на соответствующее снижение давления.
Анализ и регистрация информации перемещения синхронизируемых элементов коробки передач производятся при каждом переключении, а изменение режима синхронизации - по мере необходимости, вызванной изменением технического состояния механизма управления и трансмиссии (приработка, износ) и эксплуатационных условий (температура окружающей среды, трансмиссии и др. ).
Выключение передачи.
Выключение передачи производится обычным порядком (при обесточивании катушки распределителя).
Таким образом предложенное техническое решение обеспечивает повышение надежности и долговечности трансмиссии путем безударного переключения передач и снижения буксования синхронизаторов, а также повышения производительности, топливной экономичности и комфортабельности за счет снижения времени разрыва потока мощности при переключении передач с учетом реально изменяющихся эксплуатационных и погодно-климатических условий, технического состояния и степени износа как системы управления трансмиссий, так и транспортного средства в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления коробкой передач и устройство для его осуществления | 1991 |
|
SU1791174A1 |
| СПОСОБ УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ | 2017 |
|
RU2650330C1 |
| Система управления скоростью движения транспортного средства | 1987 |
|
SU1537575A1 |
| ПРИВОД СЦЕПЛЕНИЯ | 2013 |
|
RU2541603C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ПРИВОДОМ МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2006 |
|
RU2327203C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ПРИВОДОМ МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2008 |
|
RU2374092C1 |
| Устройство дистанционного переключения передач транспортного средства | 1989 |
|
SU1699825A1 |
| Способ управления автоматической коробкой передач | 2019 |
|
RU2712725C1 |
| СИНХРОНИЗАТОР | 2015 |
|
RU2602642C1 |
| Система управления гидромеханической передачей | 1989 |
|
SU1710381A1 |



Использование: в системах автоматического или командного переключения передач транспортных средств с механической трансмиссией. Способ обеспечивает предварительное регулирование давления рабочей среды в исполнительных механизмах переключения передач перед последующим одноименным переключением на основании регистрации и запоминания информации о характере перемещения элементов привода коробки передач по условиям блокирования синхронизатора в ходе предыдущего переключения с учетом изменяющегося технического состояния трансмиссии и механизма управления. Устройство состоит из анализирующего управляющего блока, механизма переключения с блоком электропневматических клапанов, датчиков скорости транспортного средства, положения переключаемых элементов коробки передач, давления воздуха в исполнительных механизмах и регулятора давления. 2 с. п. ф-лы, 5 ил.
