Изобретение относится к средствам технической диагностики и может быть использовано в системах контроля технического состояния сложных объектов, например, изделий авиационной техники.
Известно устройство для определения оптимального периода технического обслуживания объекта (RU № 2018915 по классу G 07 С 3/08), содержащее блоки деления, блок нелинейности, сумматор, триггер, генератор линейно изменяющегося напряжения, компараторы, дифференцирующий элемент, элемент И, элемент памяти и ключ. Оно позволяет определять максимальный период технического обслуживания объекта путем контроля состояния объекта, оценки коэффициента готовности и определения максимального периода технического обслуживания при условии постоянного значения интенсивности отказа на этапе нормальной эксплуатации.
Недостаток данного подхода состоит в том, что обслуживание объекта осуществляется без учета наработки элементов объекта.
Наиболее близким к данному способу является способ диагностирования объекта, состоящего из последовательно соединенных функциональных блоков, охваченных обратными связями, и устройство для его осуществления по авторскому свидетельству SU № 1667013 А1, кл. G 05 В 23/02.
Сущность способа заключается в том, что фиксируется первый отказ функционального блока по результатам допускового контроля и блокируется фиксация последующих отказов, для каждого функционального блока формируется сигнал, пропорциональный разности продолжительности отказа и времени нормальной работы, из полученных сигналов выбирается максимальный и фиксируется номер соответствующего ему функционального блока, для выходного параметра объекта диагностирования формируется сигнал, равный разности продолжительности отказа и ее допустимого значения, и при положительной величине сигнала фиксируются номера отказавшегося и приведшего к отказу блоков.
Устройство для реализации данного способа содержит последовательно соединенные функциональные блоки, в частности группу датчиков допускового контроля, блок вычисления максимума, элемент задержки, блок суммирования, блок преобразования и хранения значений контролируемых параметров состояния объекта, блок ключей, элемент ИЛИ.
Недостаток этого способа и устройства и состоит в том, что обслуживание объекта производится после идентификации отказа его функционального блока на фоне возможных сбоев, а устройство не содержит соответствующих блоков для прогнозирования параметров состояния объекта, блоков вычисления времени прогноза.
Настоящее изобретение направлено на устранение вышеуказанных недостатков.
Задачей изобретения является повышение оперативности и объективности результатов диагностирования сложных технических объектов.
Поставленная задача решается благодаря тому, что при диагностировании объекта применяют способ, заключающийся в фиксации первого выхода прогнозируемого значения одного из параметров состояния объекта за допустимое значение и расчете вероятностей безотказной работы функциональных блоков объекта. При этом повышение оперативности достигается за счет подготовки графа поиска отказа до его возникновения, а повышение объективности - за счет учета изменения вероятностей безотказной работы функциональных блоков объекта в зависимости от ожидаемого времени до ближайшего отказа.
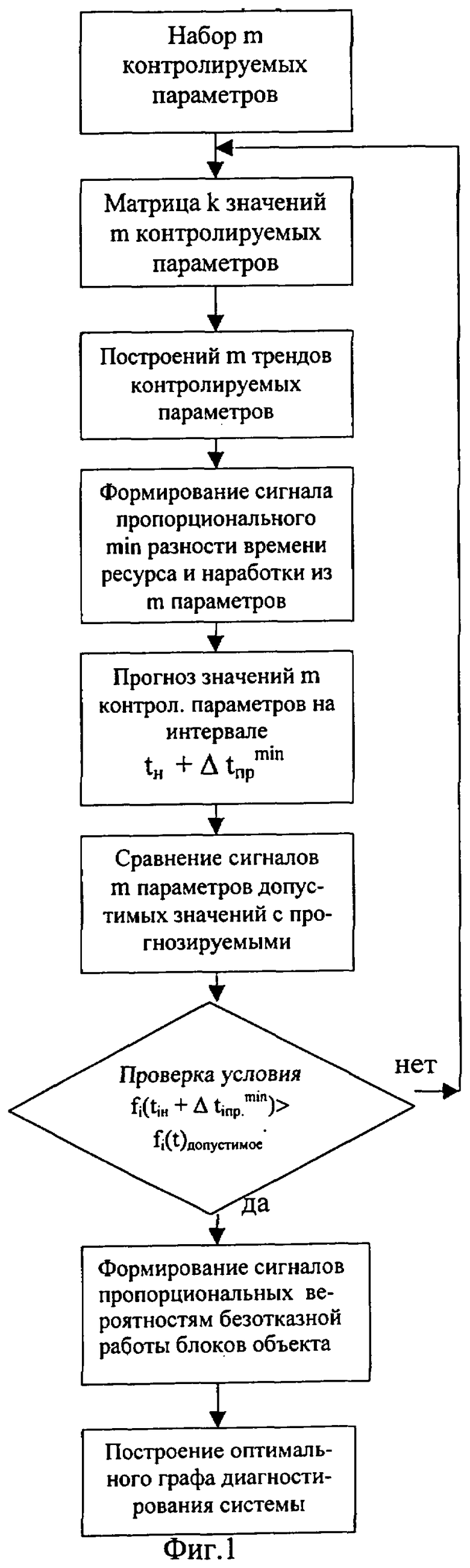
Сущность предлагаемого способа состоит в том, что выполняют контроль значений параметров технического состояния и формируют оптимальную последовательность проверок поиска отказа, причем, выполняют последовательно многократный контроль значений сигналов параметров технического состояния и формируют математические прогнозные модели изменения сигналов контролируемых параметров, по полученным моделям оценивают значения сигналов контролируемых параметров на глубине прогноза, равной сигналу минимальной разности между сигналами соответственно ресурса и наработки элементов системы, и в случае превышения одним из них сигнала допустимого значения формируют сигналы, пропорциональные величине вероятности безотказной работы элементов системы на момент времени, равный глубине прогноза, а по полученным величинам сигналов вероятности безотказной работы формируют оптимальную последовательность поиска отказа объекта.
Реализация предлагаемого способа поясняется блок-схемой алгоритма, представленной на фиг.1. Пусть имеется объект (например, функциональная система воздушного судна), который состоит из n функциональных блоков и его состояние контролируется m параметрами, причем m=n при отсутствии групповых проверок (блок 1). По "к" замерам сигналов контролируемых параметров формируют матрицу сигналов (блок 2), для каждого i параметра (i=1...m) вычисляют его производную и в прогнозаторе формируют математические прогнозные модели изменения сигналов контролируемых параметров в виде трендов fi(t) (блок 3), рассчитывают глубину прогноза Δtiпр.=tiр-tiн и выбирают минимальное значение Δt
Для реализации описанного способа предлагается устройство для диагностирования объекта, состоящее из объекта диагностирования, блока суммирования, блока преобразования и хранения значений контролируемых параметров состояния объекта, блока ключей, элемента ИЛИ, содержащее, кроме того, блок регистрации времен наработки функциональных блоков контролируемого объекта, блок задания времен ресурса функциональных блоков, генератор тактовых импульсов, блок задания периода следования тактовых импульсов, двух элементов задержки времени, элемент выбора минимального значения разности ресурса и наработки, блока прогнозирования параметров состояния, блока вычисления времени прогноза, блок вычисления текущих времен наработки, блок определения выхода контролируемых параметров за допустимые значения и блок вычисления вероятностей безотказной работы функциональных блоков контролируемого объекта, причем выходы блока регистрации времени наработки функциональных блоков контролируемого объекта к моменту очередного включения устройства и контролируемого объекта соединены с соответствующими входами блока вычисления текущих времен наработки функциональных блоков контролируемого объекта и соответствующими входами блока суммирования, причем вторые входы блока суммирования соединены с соответствующими выходами блока задания времен ресурса функциональных блоков контролируемого объекта, а выходы блока суммирования соединены с входами элемента выбора минимального значения разности времен ресурса и наработки, выход которого соединен с первым входом блока вычисления времени прогноза параметров состояния объекта, второй вход которого соединен с выходом первого элемента задержки времени, со вторым входом блока преобразования и хранения значений каждого из контролируемых параметров состояния объекта, со вторым входом блока вычисления текущих времен наработки функциональных блоков контролируемого объекта, со вторым входом блока прогнозирования параметров состояния контролируемого объекта и с входом второго элемента задержки времени, выход генератора тактовых импульсов соединен с входом первого элемента задержки времени, выход блока задания периода следования тактовых импульсов соединен с третьим входом блока вычисления времени прогноза параметров состояния объекта и с третьим входом блока вычисления текущих времен наработки функциональных блоков контролируемого объекта; выход блока вычисления времени прогноза параметров состояния объекта соединен с третьим входом блока прогнозирования параметров состояния контролируемого объекта, первые входы которого соединены с соответствующими выходами блока преобразования и хранения значений каждого из контролируемых параметров состояния объекта, первые входы которого соединены с соответствующими выходами контролируемых параметров объекта, выход второго элемента задержки времени соединен с первым входом блока определения выхода контролируемых параметров за допустимые значения, вторые входы которого соединены с соответствующими выходами блока прогнозирования параметров состояния контролируемого объекта, выходы блока определения выхода контролируемых параметров за допустимые значения соединены с входами элемента ИЛИ, выход которого соединен со вторым входом блока ключей, первые входы которого соединены соответствующими выходами блока вычисления текущих времен наработки функциональных блоков контролируемого объекта, выходы блока ключей соединены с соответствующими входами блока вычисления вероятностей безотказной работы функциональных блоков контролируемого объекта.
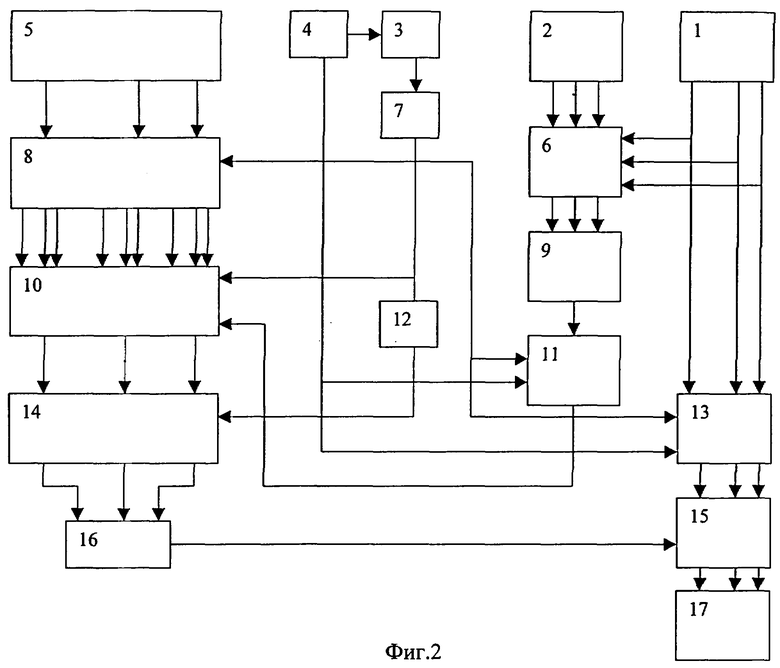
Сущность предлагаемого устройства в виде функциональной схемы показана на фиг.2, на фиг.3 представлен блок регистрации времен наработки функциональных блоков контролируемого объекта, на фиг.4 - блок задания времен ресурса, на фиг.5 - блок суммирования, на фиг.6 - блок преобразования и хранения n значений каждого из m контролируемых параметров состояния объекта, на фиг.7 - блок прогнозирования параметров состояния, на фиг.8 - блок вычисления времени прогноза m параметров состояния объекта, на фиг.9 - блок определения выхода m контролируемых параметров за допустимые значения, на фиг.10 - блок вычисления текущих времен наработки функциональных блоков контролируемого объекта, на фиг.11 - блок ключей, на фиг.12 - блок вычисления вероятностей безотказной работы n функциональных блоков объекта.
Устройство содержит (фиг.2): блок 1 регистрации времен наработки tiн (i=1,...k) функциональных блоков контролируемого объекта к моменту очередного включения устройства и контролируемого объекта, блок 2 задания времен ресурса tpi (i=1,...k) функциональных блоков, генератор тактовых импульсов 3 с периодом следования Т и скважностью <<1, блок 4 задания периода следования тактовых импульсов Т, контролируемый объект 5, блок 6 суммирования, первый элемент задержки на время Т 7, блок 8 преобразования и хранения n значений каждого из m контролируемых параметров состояния объекта 5, элемент 9 выбора минимального значения разности ресурса и наработки из k значений, блок 10 прогнозирования параметров состояния, блок 11 вычисления времени прогноза, второй элемент задержки 12 на время nТ, блок 13 вычисления текущих времен наработки tiн (i=1,...k), блок 14 определения выхода m контролируемых параметров за допустимые значения через время прогноза tn, блок ключей 15, элемент ИЛИ 16 c m входами и блок 17 вычисления вероятностей безотказной работы n функциональных блоков контролируемого объекта.
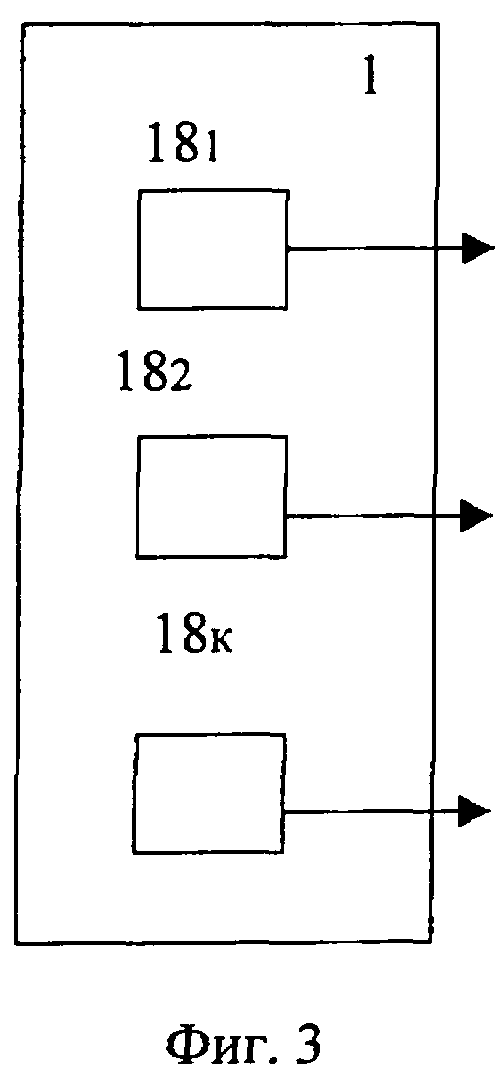
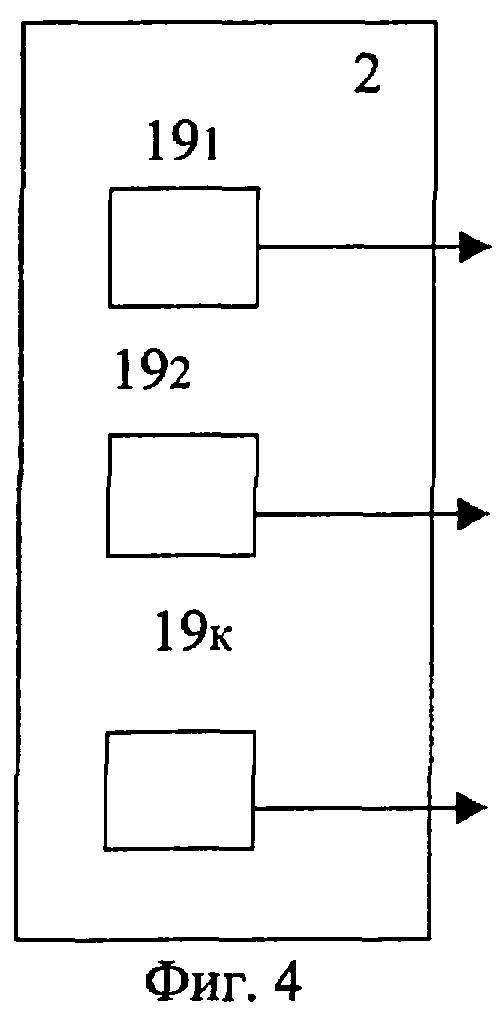
Блок регистрации времен наработки tiн (i=1,...k) функциональных блоков контролируемого объекта к моменту очередного включения устройства (фиг.3) и блок задания времен ресурса tpi (i=1,...k) функциональных блоков контролируемого объекта к моменту очередного включения устройства 2 (фиг.4) содержат по k задатчиков времен наработки tiн (i=1,...k) 18i (i=1,...k) и времен ресурса tpi (i=1,...k) 19i (i=1,...k), соответственно.
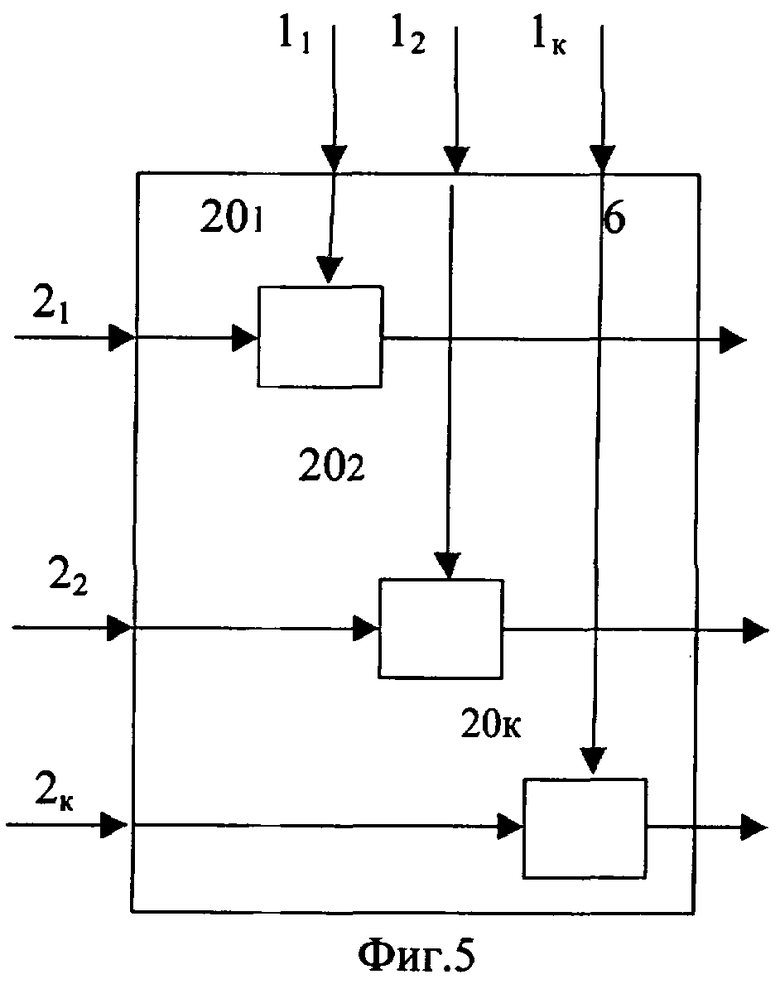
Блок суммирования 6 (фиг.5) содержит k сумматоров 20i (i=1,...k).
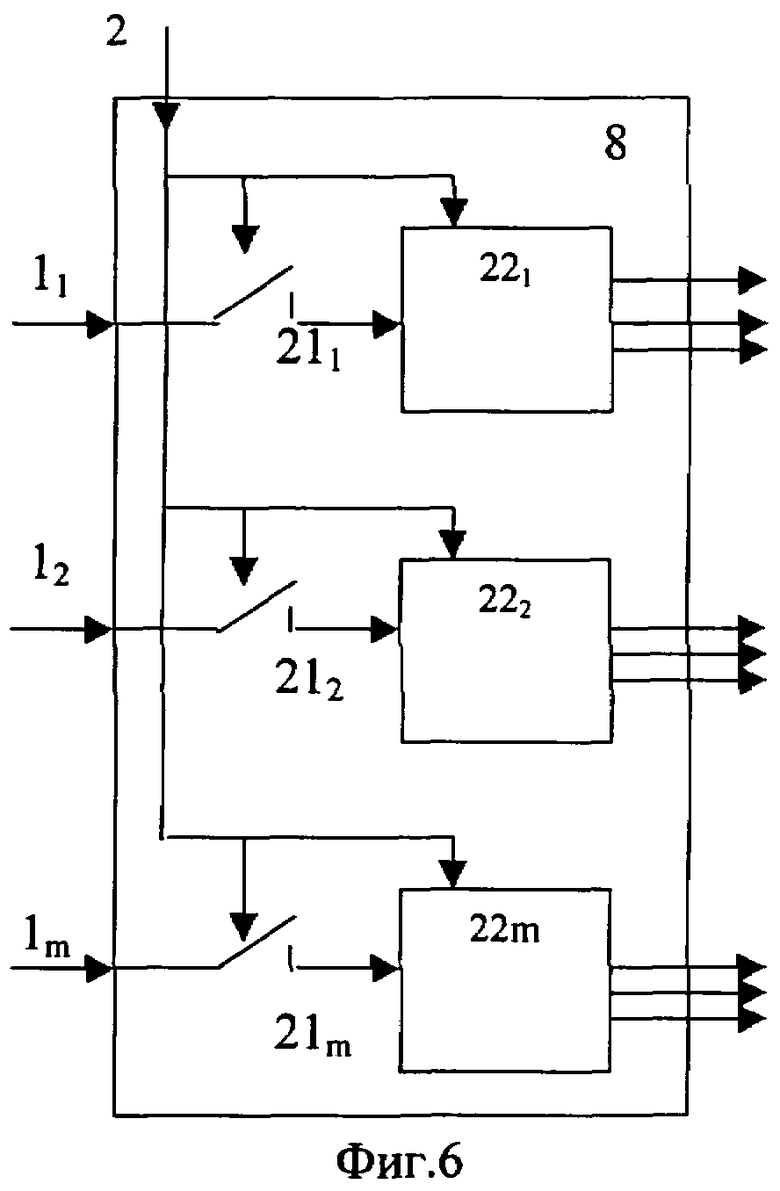
Блок преобразования и хранения n значений каждого из m контролируемых параметров состояния объекта 8 (фиг.6) содержит нормально-разомкнутые ключи 21i (i=1,...m) и блоки 22i (i=1,...m) преобразования и хранения n значений каждого из m контролируемых параметров объекта 5.
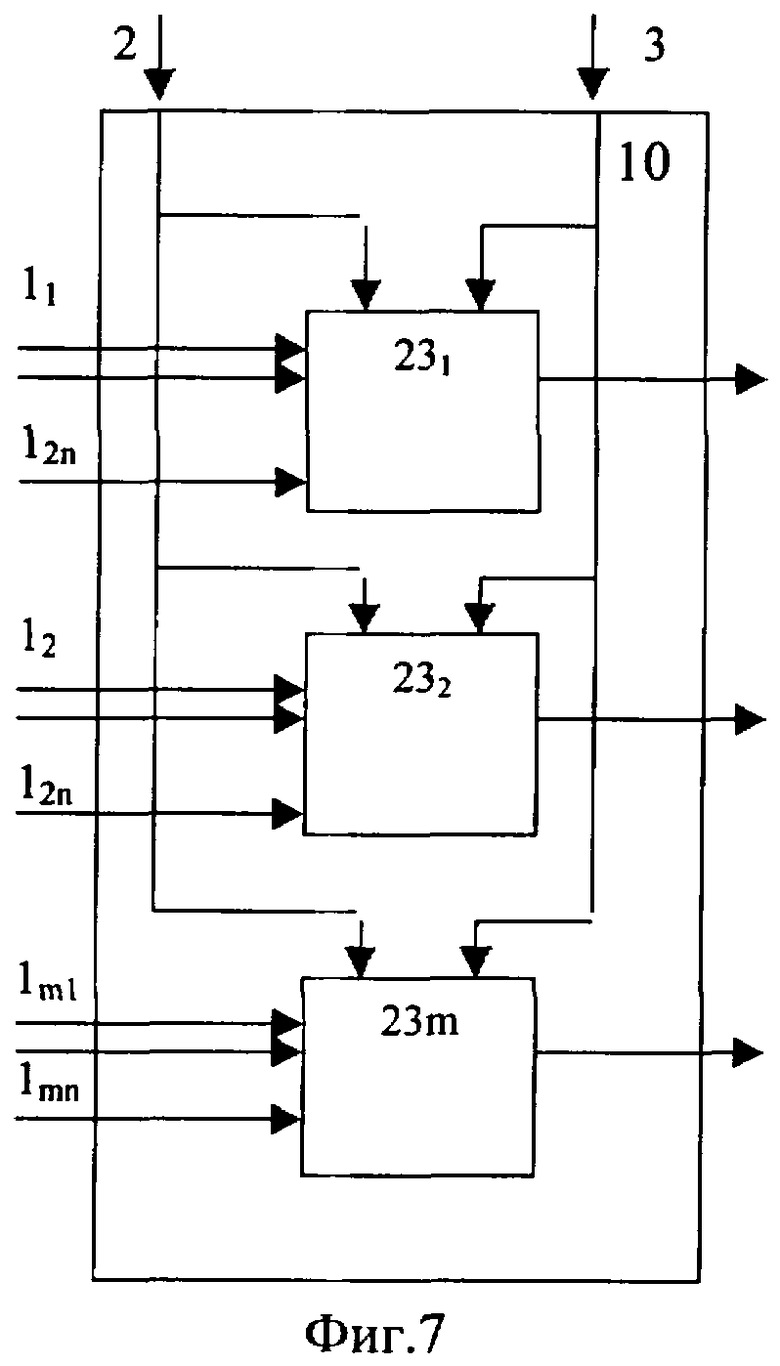
Блок прогнозирования 10 (фиг.7) содержит m блоков прогнозирования 23i (i=1,...m).
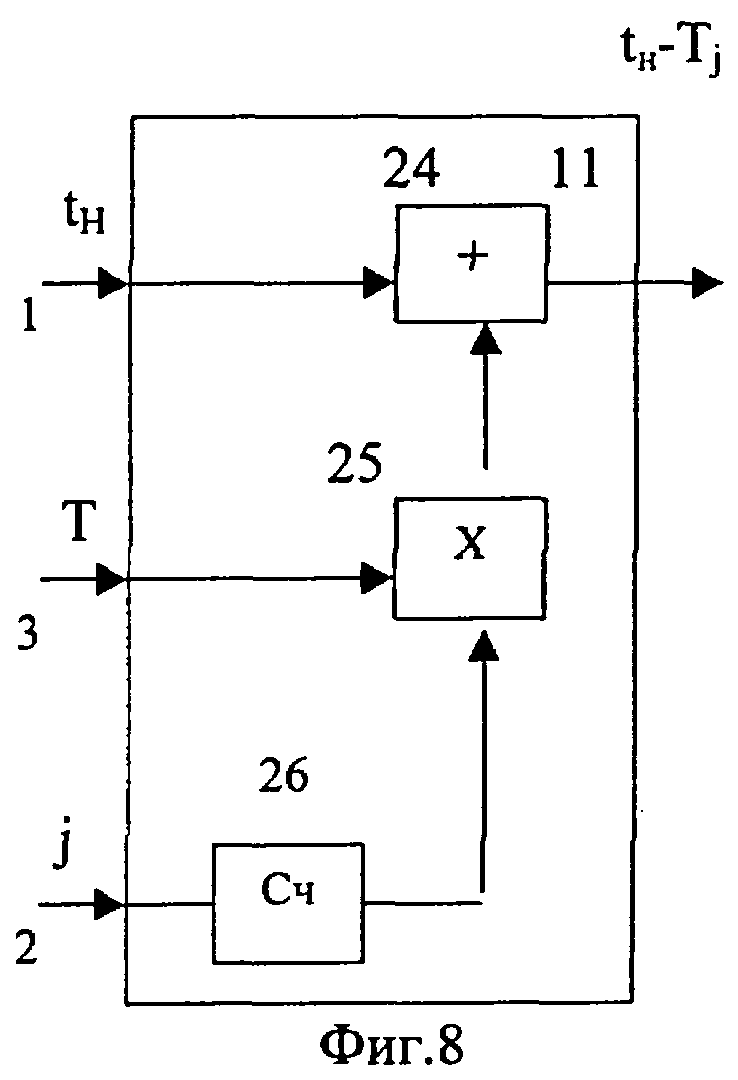
Блок вычисления времени прогноза m параметров состояния объекта 11 (фиг.8) состоит из сумматора 24, блока умножения 25 и счетчика импульсов 26.
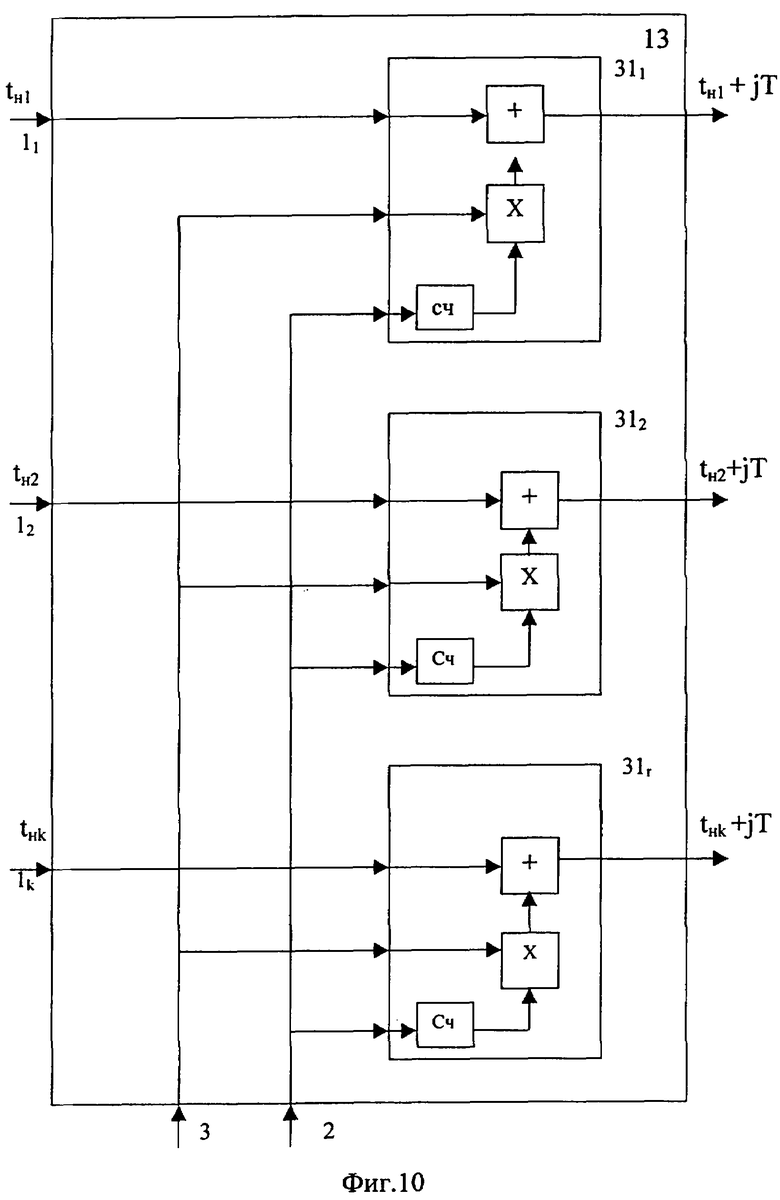
Блок вычисления текущих времен наработки tiн (i=1,...k) функциональных блоков контролируемого объекта 13 (фиг.10) содержит k блоков вычисления 31i (i=1,...k), аналогичных блоку вычисления времени прогноза m параметров состояния объекта 11 (фиг.8).
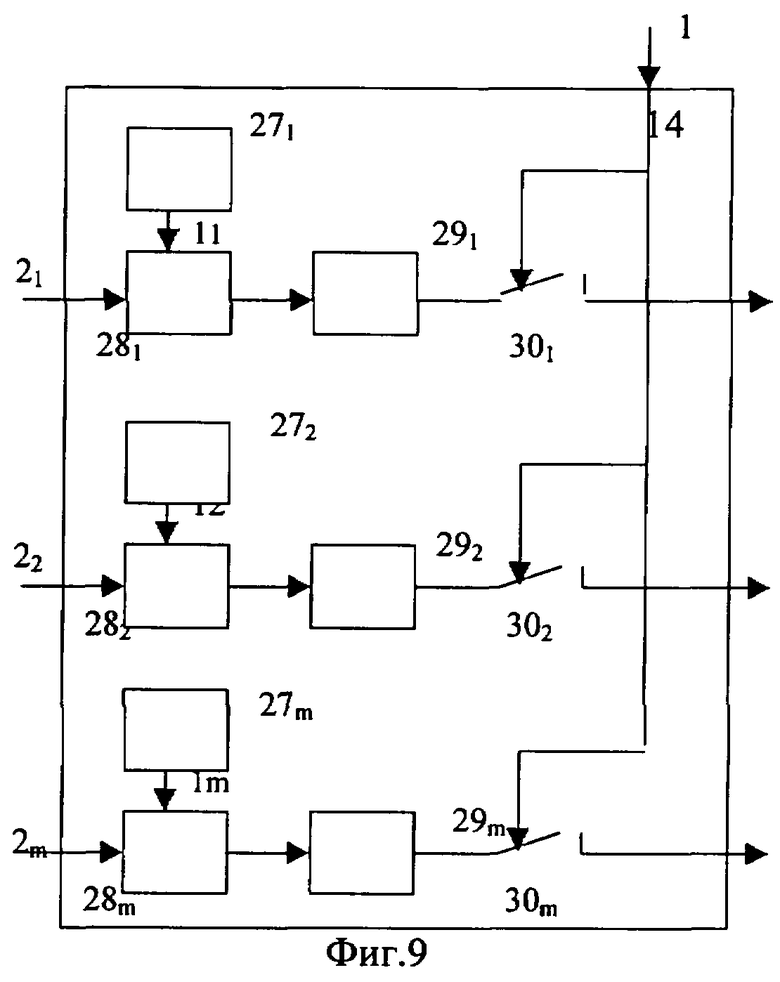
В состав блока определения выхода m контролируемых параметров за допустимые значения через время прогноза tn 14 (фиг.9) входят блоки задания номинальных значений контролируемых параметров 27i (i=1,...m), сумматоры 28i (i=1,...m), блоки нечувствительности с ограничениями 29i (i=1,...m) и нормально-разомкнутые ключи 30i (i=1,...m).
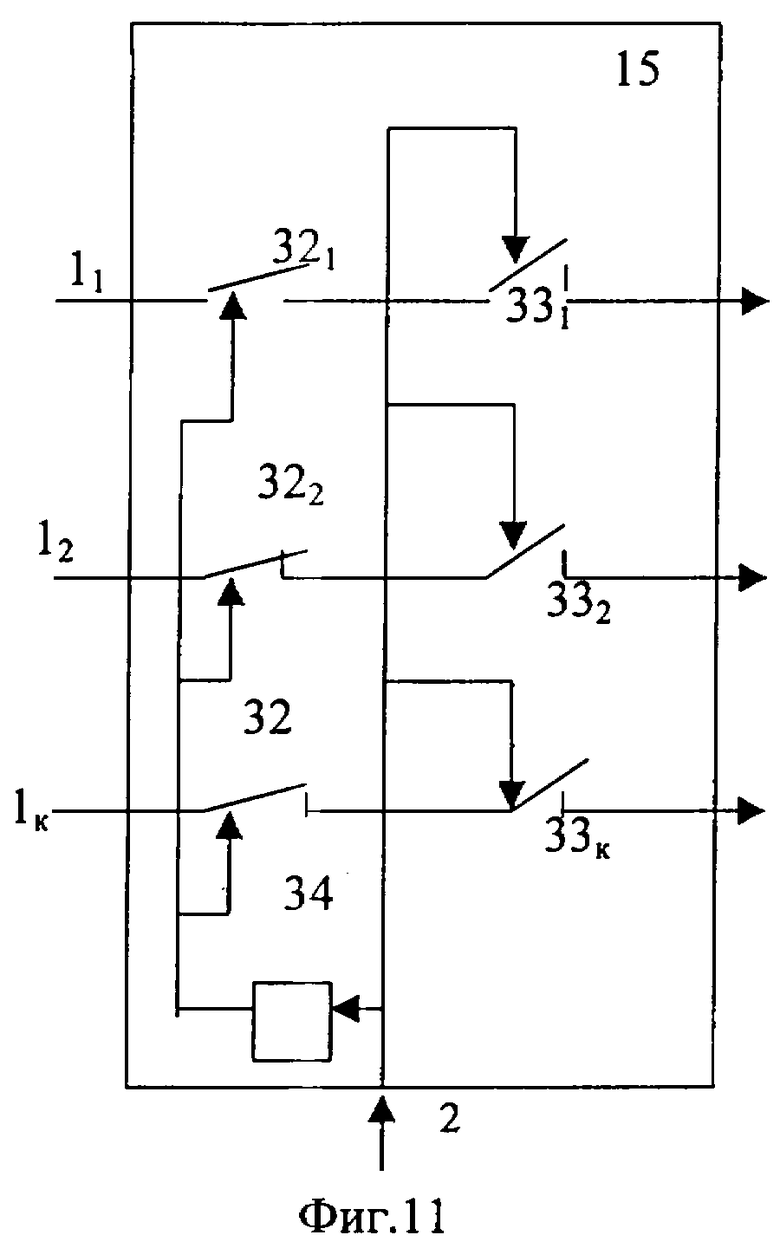
Блок ключей 15 (фиг.11) содержит нормально-замкнутые ключи 32i (i=1,...m), нормально-разомкнутые ключи 33i (i=1,...m) и элемент задержки 34 на время t1<<<Т.
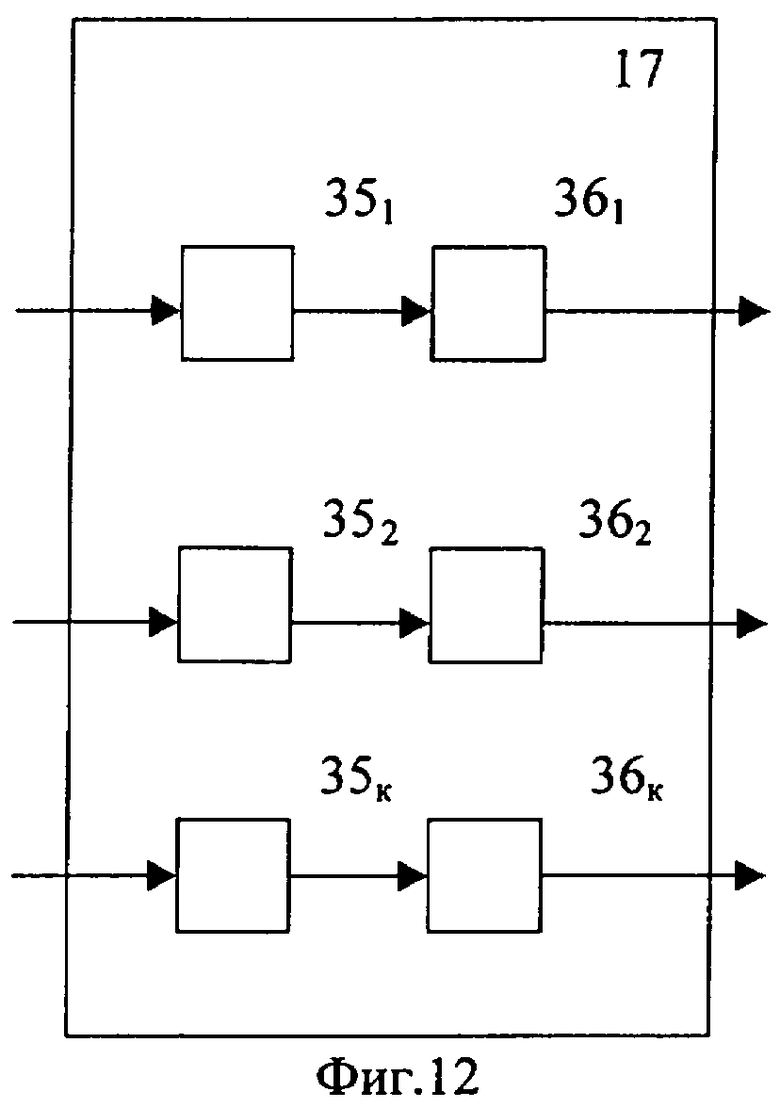
Блок вычисления вероятностей безотказной работы k функциональных блоков контролируемого объекта 17 (фиг.12) содержит m блоков запоминания текущих времен наработки tiн (i=1,...k) функциональных блоков контролируемого объекта 35i (i=1,...k) и m блоков вычисления вероятностей безотказной работы рi=ехр[-λi(tiн+jT)], (i=1,...k) функциональных блоков контролируемого объекта 36i (i=1,...k).
Устройство имеет три этапа в своей работе:
- перед включением устройства и контролируемого объекта устанавливаются времена наработки tiн (t=1,...k) функциональных блоков контролируемого объекта к моменту очередного включения устройства 1 и времена ресурса tpi (i=1,...k) функциональных блоков контролируемого объекта к моменту очередного включения;
- переходный этап, на котором происходит накопление информации, необходимой для прогнозирования контролируемых параметров объекта 5; длительность этого этапа равняется n периодам Т; за это время генератор тактовых импульсов вырабатывает n+1 импульс; импульс, вырабатываемый этим генератором в нулевой момент времени, имеет номер “0”;
- номинальный этап, на котором осуществляется прогноз выхода m параметров контролируемого объекта за допустимые значения, и при выходе одного из прогнозируемых параметров за допустимое значение вычисляются вероятности безотказной работы каждого функционального блока контролируемого объекта для текущего времени наработки функциональных блоков объекта; этот этап начинается после выработки n+1-го тактового импульса с номером “n”.
Устройство работает следующим образом.
Пусть время ресурса i-го функционального блока объекта составляет tpi, (i=1,...k), а время наработки к моменту его очередного включения - tiн (t=1,...k). Перед включением устройства эти параметры выставляются на блоке задания времен наработки tiн (i=1,...k) функциональных блоков контролируемого объекта к моменту очередного включения устройства 1 и на блоке задания времен ресурса tpi (i=1,...k) функциональных блоков контролируемого объекта к моменту очередного включения устройства 2, соответственно.
В исходном стоянии к моменту очередного включения устройства и контролируемого объекта нормально-разомкнутые ключи 21i, (i=1,...m), 29i, (i=1,...m) и 33i, (i=1,...k) находятся в разомкнутом состоянии, нормально-замкнутые ключи 32i, (i=1,...m) находятся в замкнутом состоянии, в блоках преобразования и хранения n значений каждого из m контролируемых параметров состояния объекта 22i, (i=1,...m) данных о значениях контролируемых параметров нет.
Счетчики импульсов блоков 11 и 13 обнулены.
При включении устройства на выходе каждого блока задания времени ресурса контролируемого объекта 18i, (i=1,...k) вырабатывается сигнал, пропорциональный tpi, (i=1,...k), а на выходе каждого блока задания времени наработки функционального блока 19i, (i=1,...k)-tiн, (i=1,...k).
Эти сигналы поступают на первые входы 1i, i=1,...k и на вторые входы 2i, i=1,...k блока суммирования 6, соответственно. На выходах блока суммирования 6 формируются сигналы, пропорциональные Δti=tpi-tiн, (i=1,...k), которые поступают на соответствующие входы блока 9 выбора минимального из k значений. На выходе блока 9 вырабатывается сигнал Δtmin, минимальный из Δti=tрi-tiн, (i=1,...k). Этот сигнал поступает на первый вход блока вычисления времени прогноза 11, на второй вход которого с выхода блока задания периода следования тактовых импульсов 4 поступает сигнал, пропорциональный периоду Т. На третий вход блока 11 сигнал не поступает, потому что сигнал на выходе первого элемента задержки 7 равен нулю. Следовательно, на выходе блока 11 сигнал равен Δtmin, который поступает на третий вход блока прогнозирования 10.
На выходе каждого блока задания допустимого значения контролируемого параметра объекта 27i, i=1,...,m вырабатывается сигнал, пропорциональный допустимому значению контролируемого параметра аiн i=1,...,m. Этот сигнал поступает на первые входы сумматоров 28i, i=1,...,m. С контролируемого объекта 5 на первые входы 1i, i=1,...,m блока преобразования и хранения 8 и далее на входы нормально-разомкнутых ключей 21i, i=1,...,m поступают сигналы, пропорциональные текущим значениям контролируемых параметров ai(t), i=1,...,m.
Тактовый генератор 3 вырабатывает тактовый импульс с номером О, который поступает на вход первого элемента задержки 7. На выходе первого элемента задержки 7 сигнал в течение первого периода дискретности Т отсутствует, поэтому нормально-разомкнутые ключи 21i, i=1,...,m остаются в разомкнутом состоянии, блок прогноза 10 не вырабатывает никаких сигналов, счетчики блока вычисления времени прогноза m параметров состояния объекта 11 и блока вычисления текущих времен наработки tiн (i=1,...k) функциональных блоков контролируемого объекта 13 остаются в обнуленном состоянии.
Нормально-разомкнутые ключи 30i, i=1,...,m блока 14 остаются в разомкнутом состоянии в течение первых n+1 тактовых импульсов, потому что сигнал на выходе второго элемента задержки появляется только при выработке тактовым генератором n+2-го тактового импульса, импульса, номер которого n+1. Сигналы на входы элемента ИЛИ 16 не поступают, поэтому нормально-замкнутые ключи 32i, i=1,...,k остаются в замкнутом состоянии, а нормально-разомкнутые ключи 33i, i=1,...,k остаются в разомкнутом состоянии.
При выработке тактовым генератором 3 второго тактового импульса с номером (1) появляется сигнал на выходе первого элемента задержки 7. Сигнал на выходе этого элемента теперь будет при каждом новом тактовом импульсе. Этот сигнал поступает на второй вход блока 8 преобразования и хранения n значений каждого из m контролируемых параметров состояния объекта 5. Под действием переднего фронта этого сигнала нормально-разомкнутые ключи 21i, i=1,...,m замыкаются, сигналы, пропорциональные значениям контролируемых параметров а(Т)i i=1,...,m, поступают в блоки преобразования и хранения 22i, i=1,...,m. Одновременно тактовый импульс с номером (1) поступает на третьи входы блока вычисления времени прогноза m параметров состояния объекта 11 и блока вычисления текущих времен наработки tiн (i=1,...k) функциональных блоков контролируемого объекта 13. Счетчики этих блоков под действием переднего фронта этого импульса увеличивают свои показания на (1), сигнал на выходе блока вычисления времени прогноза m параметров состояния объекта 11 становится равным Δtmin-T, а сигналы на выходах блока вычисления текущих времен наработки tiн (t=1,...k) функциональных блоков контролируемого объекта 13 становятся равными tiн+T(1=1,...k). Этот блок прогнозирования 10 вырабатывает прогнозируемые значения параметров ai(Δtmin-T), i=1,...,m, которые поступают на вторые входы сумматоров 28i, i=1,...,m блока 14, с выходов которого сигналы через блоки нечувствительности с ограничениями 29i, i=1,...,m поступают на нормально-разомкнутые ключи 30i, i=1,...,m. Так как эти ключи остаются разомкнутыми в течение первых n+1 периодов Т, то сигналы на выходах блока 14 будут отсутствовать. Следовательно, сигналы на входы элемента ИЛИ 16 опять не поступают и нормально-разомкнутые ключи 31i, i=1,...,k остаются в разомкнутом состоянии.
При выработке тактовым генератором 3 тактового импульса с номером (2) сигнал на выходе первого элемента задержки 7 также появится. Этот сигнал поступает на второй вход блока 8 преобразования и хранения n значений каждого из m контролируемых параметров состояния объекта 5. Под действием этого сигнала нормально-разомкнутые ключи 21i, i=1,...,m опять замыкаются и сигналы, пропорциональные значениям контролируемых параметров а(2Т)i, i=1,...,m, поступают в блоки преобразования и хранения 22i, i=1,...,m. Под действием этого же тактового импульса полученные на предыдущем такте значения контролируемых параметров а(Т)i, i=1,...,m сдвигаются и в блоках 22i, i=1,...,m будет храниться уже два значения параметров аi, i=1,...,m - для моментов времени Т и 2Т. Одновременно тактовый импульс с номером (2) поступает на третьи входы блока вычисления времени прогноза m параметров состояния объекта 11 и блока вычисления текущих времен наработки tiн (i=1,...k) функциональных блоков контролируемого объекта 13. Счетчики этих блоков под действием переднего фронта этого импульса увеличивают свои показания на (1), сигнал на выходе блока вычисления времени прогноза m параметров состояния объекта 11 становится равным Δtmin-2T, а сигналы на выходах блока вычисления текущих времен наработки tiн (i=1,...k) функциональных блоков контролируемого объекта 13 становятся равными tiн+2T(i=1,...k). Блок прогнозирования 10 вырабатывает прогнозируемые значения параметров ai(Δtmin-2Т), i=1,...,m, которые поступают на вторые входы сумматоров 28i, i=1,...,m блока 14, с выходов которого сигналы через блоки нечувствительности с ограничениями 29i, i=1,...,m поступают на нормально-разомкнутые ключи 30i, i=1,...,m. Так как эти ключи остаются разомкнутыми в течение первых n+1 периодов Т, то сигналы на выходах блока 14 опять будут отсутствовать, и, следовательно, сигналы на входы элемента ИЛИ 16 опять не поступают и нормально-разомкнутые ключи 31i, i=1,...,k остаются в разомкнутом состоянии.
Этот процесс будет повторяться в течение n+1 тактового импульса (фиг.11). При этом прогнозируемые значения параметров состояния объекта аin(Δtmin-jT), (i=1,...,m) существенно отличаются от номинальных значений этих параметров аiн, (i=1,...,m), потому что в блоке преобразования и хранения n значений каждого из m контролируемых параметров состояния объекта нет необходимых для правильного прогноза n значений каждого из параметров аi, i=1,...,m: а(Т)i, a(2T)i, а(3Т)i,...,a(nT)i, i=1,...,m.
После выработки тактовым генератором 3 n+1-го тактового импульса, номер которого n, в блоке преобразования и хранения 8 будут храниться уже n значений каждого контролируемого параметра аi, i=1,...,m: а(Т)i, а(2Т)i, а(3Т)i,...,а(nТ)i, i=1,...,m, сигнал на выходе блока вычисления времени прогноза m параметров состояния объекта 11 будет равен Δtmin-nT, сигналы на выходах блока вычисления текущих времен наработки tiн (i=1,...k) функциональных блоков контролируемого объекта 13 равны tiн+nТ (i=1,...k). На выходе второго элемента задержки 12 появляется сигнал, который поступает на управляющие входы нормально-разомкнутых ключей 30i, (i=1,...m). Эти ключи замыкаются, подключая выходы блоков нечувствительности с ограничением 29i, (i=1,...m) к соответствующим входам элемента ИЛИ 16, самоблокируются и остаются в замкнутом состоянии в течение всей последующей работы устройства. Второй этап работы устройства завершается и оно выходит на номинальный режим работы.
На номинальном режиме работы устройства возможны два режима:
- прогнозируемые значения всех контролируемых параметров объекта находятся в допустимых пределах;
- хотя бы для одного из контролируемых параметров его прогнозируемое значение выходит за допустимые пределы.
Пусть объект функционирует в штатном режиме и все его контролируемые параметры находятся в допустимых пределах. При выработке тактовым генератором 3 очередного тактового импульса с номером j, j>n, сигнал с выхода первого элемента задержки 7 поступает на второй вход блока преобразования и хранения n значений каждого из m контролируемых параметров состояния объекта 8, на второй вход блока прогнозирования параметров состояния контролируемого объекта 10, на третий вход блока вычисления времени прогноза m-параметров состояния объекта 11, на вход второго элемента задержки 12 и на третий вход блока вычисления текущих времен наработки tiн (i=1,...k) функциональных блоков контролируемого объекта 13.
Под действием переднего фронта этого импульса:
- в блоке вычисления текущих времен наработки функциональных блоков контролируемого объекта 13 показания счетчиков увеличиваются на единицу и вычисляются сигналы, пропорциональные текущим временам наработки tiн+jT (i=1,...k); эти сигналы через нормально-замкнутые ключи 32i, (i=1,...,k) поступают на входы нормально-разомкнутых ключей 33i, (i=1,...,k) блока ключей 15;
- на первые входы блока прогнозирования параметров состояния контролируемого объекта 10 с блока преобразования и хранения n значений каждого из m контролируемых параметров состояния объекта 8 поступают сигналы а(Т)i, а(2Т)i, а(3Т)i,...,а(nТ)i, (i=1,...,m);
- в блоке вычисления времени прогноза m параметров состояния объекта 11 показания счетчика 26 увеличивается на единицу, вычисляется время прогноза Δtmin-jT, которое поступает на третий вход блока прогнозирования параметров состояния контролируемого объекта 10.
Под действием заднего фронта этого импульса в блоке прогнозирования параметров состояния контролируемого объекта 10 вычисляются прогнозируемые значения параметров состояния объекта aiн(Δtmin-jT), (i=1,...,m). Эти значения поступают на вторые входы сумматоров 28i, (i=1,...,m), на первые входы которых поступают номинальные значения параметров состояния объекта аiн, (i=1,...,m) с выходов блоков задания номинальных значений контролируемых параметров 27i, (i=1,...,m). В результате на выходе сумматоров 28i, (i=1,...,m) сигналы пропорциональны разности между номинальными значениями параметров состояния контролируемого объекта аiн, (i=1,...,m) и их прогнозируемыми значениями
a(Δtmin-jT)in, (i=1,...,m): Δai(Δtmin-jT)=aiн-a(Δtmin-jT)in, (i=1,...,m).
Эти сигналы поступают на входы соответствующих блоков нечувствительности с ограничениями 29i, (i=1,...,m). Ширина зоны нечувствительности каждого из блоков нечувствительности с ограничениями 29i, (i=1,...,m) равна допустимому изменению соответствующего контролируемого параметра состояния объекта аi, (i=1,...,m). Если все сигналы ***ai(Atmin-jT), (i=1,...,m) не превышают ширины зоны нечувствительности соответствующих им блоков нечувствительности с ограничениями 29i, (i=1,...,m), то на выходе блоков нечувствительности с ограничениями 29i, (i=1,...,m) сигналы отсутствуют. Сигнал на выходе элемента ИЛИ 16 равен нулю и на управляющих входах нормально-замкнутых ключей 32i, (i=1,...,k) и нормально-разомкнутых ключей 33i, (i=1,...,k) сигнал также отсутствует, поэтому в блоке вычисления вероятностей безотказной работы k функциональных блоков контролируемого объекта 17 никакие вычисления не производятся.
При поступлении каждого последующего тактового импульса работа устройства повторяется. Устройство работает в таком режиме до тех пор, пока хотя бы один из сигналов ain(Δtmin-jT), (i=1,...,m) не превысит ширины зоны нечувствительности соответствующего ему блока нечувствительности с ограничениями 29i, (i=1,...,m). Если хотя бы один из сигналов ain(Δtmin-jT), (i=1,...,m) выйдет за пределы ширины зоны нечувствительности соответствующего ему блока нечувствительности с ограничениями 29i, (i=1,...,m), то на выходе соответствующего блока нечувствительности с ограничениями 29i, (i=1,...,m) появится сигнал, отличный от нуля. На выходе элемента ИЛИ 18 также появится сигнал, который поступает на управляющие входы нормально-замкнутых ключей 32i, (i=1,...,k) и нормально-разомкнутых ключей 33i, (i=1,...,k) блока ключей 15. Нормально-разомкнутые ключи 33i, (i=1,...,k) замыкаются и самоблокируются. Сигналы, пропорциональные текущим временам наработки (tni-jT) (i=1,...k) поступают на соответствующие входы блока вычисления вероятностей безотказной работы k функциональных блоков контролируемого объекта 17, запоминаются в m блоках запоминания текущих времен наработки tni (i=1,...k) функциональных блоков контролируемого объекта 35i (i=1,...k), нормально-замкнутые ключи 32i, (i=1,...,k) под действием сигнала с выхода элемента задержки 34 через время То размыкаются и самоблокируются. В блоках вычисления вероятностей безотказной работы функциональных блоков контролируемого объекта 36i (i=1,...k) вычисляются необходимые для построения графа диагностирования контролируемого объекта вероятности безотказной работы каждого функционального блока контролируемого объекта рi=exp[-λi(tHi+jT)], (i=1,...k).
После вычисления этих вероятностей и их фиксации, например, на принтере, устройство отключается.
Блок регистрации времен наработки tni (i=1,...k) 1 функциональных блоков контролируемого объекта к моменту очередного включения устройства (фиг.3) и блок задания времен ресурса tpi (i=1,...k) 2 функциональных блоков контролируемого объекта к моменту очередного включения устройства (фиг.4) содержат по k задатчиков времен наработки tni (i=1,...k) 18i (i=1,...k) и времен ресурса tpi (i=1,...k) 19i (i=1,...k), соответственно. Эти задатчики реализуются с помощью потенциометрических датчиков (см. “Системы автоматического управления”, часть 1. Кейн В.М., Красов А.И., Федоров С.М., Л.: ОЛАГА, 1978, стр.19-22).
Блок суммирования 6 (фиг.5) содержит k сумматоров 20i (i=1,...k). Сумматоры 20i, (i=1,...k), 24, 28i, (i=1,...m) и 31i, (i=1,...k) реализуются с помощью операционных усилителей (см. Справочник по радиоэлектронике в трех томах. Под общей ред. проф., докт. техн. наук. А.А.Куликовского, т. 3, "Энергия", 1970, стр. 284-286).
Блок преобразования и хранения n значений 8 каждого из m контролируемых параметров состояния объекта (фиг.6) содержит нормально-разомкнутые ключи 21i (i=1,...m) и блоки 22i (i=1,...m) преобразования и хранения n значений каждого из m контролируемых параметров объекта 5. Такие же ключи 30i (i=1,...m), 33i (i=1,...k) содержат блок определения выхода m контролируемых параметров за допустимые значения через время прогноза tn 14 и блок ключей 15.
В качестве нормально-разомкнутых ключей 21i (i=1,...m), 30i (i=1,...m), 33i (i=1,...k) можно использовать реле с нормально-разомкнутыми контактами (см. Справочник по радиоэлектронике в трех томах. Под общей ред. проф., докт. техн. наук. А.А.Куликовского. Том 3, "Энергия", 1970, стр. 242-244).
В качестве нормально-замкнутых ключей 32i (i=1,...k) блока ключей 15 можно использовать реле с нормально-замкнутыми контактами (см. Справочник по радиоэлектронике в трех томах. Под общей ред. проф., докт. техн. наук. А.А.Куликовского. Том 3, "Энергия", 1970, стр. 242-244). Блоки 22i (i=1,...m) преобразования и хранения n значений каждого из m контролируемых параметров объекта 5 блока преобразования и хранения n значений 8 каждого из m контролируемых параметров состояния объекта (фиг.6) реализуются с помощью преобразователей непрерывных величин в дискретные (см. Справочник по радиоэлектронике в трех томах. Под общей ред. проф., докт. техн. наук. А.А.Куликовского. Том 3, "Энергия", 1970, стр. 272) и запоминающих устройств на ферритовых сердечниках (см. Справочник по радиоэлектронике в трех томах. Под общей ред. проф., докт. техн. наук. А.А.Куликовского. Том 3, "Энергия", 1970, стр. 245-248).
Блок прогнозирования 10 (фиг. 7) содержит m блоков прогнозирования 23i (i=1,...m), каждый из которых можно реализовать известными методами (см. Гаскаров Д.В., Голинкевич Т.А., Мозгалевский А.В. Прогнозирование технического состояния и надежности радиоэлектронной аппаратуры. Под ред. Т.А.Голинкевича, M., "Советское радио", 1974, стр. 42-52, 187-200).
Блок вычисления 11 времени прогноза m параметров состояния объекта (фиг.8) состоит из сумматора 24, блока умножения 25 и счетчика импульсов 26. Блок вычисления текущих времен наработки ti(i=1,...k) 13 функциональных блоков контролируемого объекта (фиг.10) содержит k блоков вычисления 31i (i=1,...k), аналогичных блоку вычисления времени прогноза m параметров состояния объекта 11 (фиг.8).
Счетчик импульсов 26 блока 11 и счетчики импульсов блоков 31i (i=1,...k) являются известными элементами (см. Справочник по радиоэлектронике в трех томах. Под общей ред. проф., докт. техн. наук. А.А.Куликовского. Том 3, "Энергия", 1970, стр. 330-334).
Реализация блоков умножения, входящих в состав блоков 11 и 31i (i=1,...k.) возможна различными способами (см. Справочник по радиоэлектронике в трех томах. Под общей ред. проф., докт. техн. наук. А.А. Куликовского. Том 3, "Энергия", 1970. Стр. 297-300, стр. 365, 366).
В состав блока определения выхода m контролируемых параметров 14 за допустимые значения через время прогноза tn (фиг. 9) входят блоки задания номинальных значений контролируемых параметров 27i (i=1,...m), сумматоры 28i (i=1,...m), блоки нечувствительности с ограничениями 29i (i=1,...m) и нормально-разомкнутые ключи 30i (i=1,...m).
Реализации сумматоров 28i (i=1,...m) и нормально-разомкнутых ключей 30i (i=1,...m) рассмотрены. Блоки нечувствительности с ограничениями 29i (i=1,...m) можно реализовать операционными усилителями с диодными ограничителями (см. Справочник по радиоэлектронике в трех томах. Под общей ред. проф., докт. техн. наук. А.А.Куликовского. Том 3, "Энергия", 1970, стр. 297).
Элемент задержки 34 на время Ti<<T блока ключей 15 (фиг.11) реализуется с помощью реле времени (см. Справочник по радиоэлектронике в трех томах. Под общей ред. проф., докт. техн. наук. А.А.Куликовского. Том 3, "Энергия", 1970, стр. 246, 247). Аналогично реализуются первый элемент задержки на время Т 7 и второй элемент задержки на время nТ 12.
Блок вычисления вероятностей безотказной работы k функциональных блоков контролируемого объекта 17 (фиг.12) содержит m блоков запоминания текущих времен наработки tni (i=1,...k) функциональных блоков контролируемого объекта 35i (i=1,...k) и m блоков вычисления вероятностей безотказной работы рi=ехр[-λi(tni+jT)], (i=1,...k) функциональных блоков контролируемого объекта 36i (i=1,...k).
Блоки запоминания текущих времен наработки tni (i=1,...k) функциональных блоков контролируемого объекта 35i (i=1,...k) реализуются, например, с помощью запоминающих устройств вычислительных машин (см. Справочник по радиоэлектронике в трех томах. Под общей ред. проф., докт. техн. наук. А.А.Куликовского. Том 3, "Энергия", 1970, стр. 340-354).
Блоки вычисления вероятностей безотказной работы рi=ехр[-λi(tni+jT)], (i=1,...k) функциональных блоков контролируемого объекта 36i (i=1,...k) представляют собой расшифровывающие следящие системы, на вход каждой из которых поступает сигнал, пропорциональный текущему времени наработки каждого функционального блока контролируемого объекта tni+jT, (i=1,...k), а на выходе имеется профильный потенциометр, реализующий зависимость y=e-1x. В результате отработки каждой следящей системой сигнала, пропорционального текущему времени наработки tni+jТ, (i=1,...k) на выходе ее получается сигнал, пропорциональный вероятности безотказной работы соответствующего функционального блока контролируемого объекта 5 (см. “Системы автоматического управления”, часть 1. Кейн В.М., Красов А.И., Федоров С.М. Л.: ОЛАГА, 1978, стр. 84-86). Для фиксации его значения, этот сигнал поступает на преобразователь непрерывной величины в дискретную и затем распечатывается на принтере. Генератор таковых импульсов 3 представляет собой блокинг-генератор (см. Степаненко И.П. Основы теории транзисторов и транзисторных схем, изд. 3-е, переработ, и доп. М.: “Энергия”, 1973. Стр. 517-530).
Блок задания периода следования тактовых импульсов Т 4 реализуется с помощью потенциометрического датчика (см. “Системы автоматического управления”, часть 1. Кейн В.М., Красов А.И., Федоров С.М., Л.: ОЛАГА, 1978, стр.19-22).
Элемент ИЛИ с m входами является стандартным элементом (см. Резник Я.А. Основы вычислительной техники. Учебное пособие. Л.: ОЛАГА, 1972, стр. 114-116).
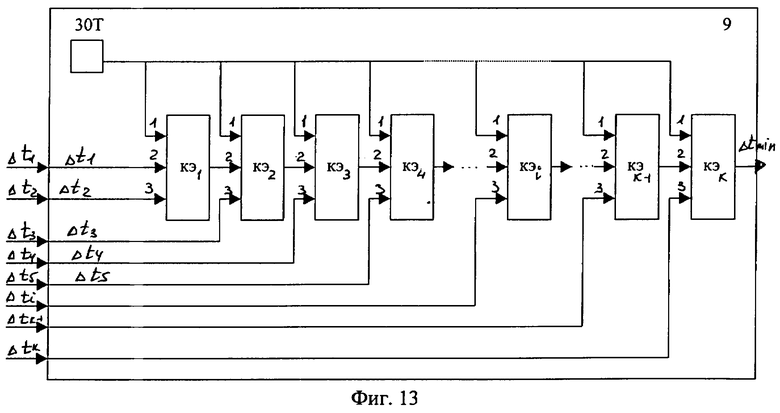
Схема реализации элемента выбора минимального из k значений 9 приведена на фиг.13. В ее состав входят кворум-элементы КЭi (i=1,...k-1) и задатчик отрицательного сигнала ЗОТ. Работает этот элемент выбора минимального из k значений 9 следующим образом. Пусть на k входы блока поступают сигналы с выхода блока суммирования 6. Эти сигналы все положительные, поскольку времена прогноза для k функциональных блоков контролируемого объекта не могут быть отрицательными. На первый вход каждого кворум-элемента КЭi (i=1,...k-1) поступает отрицательный сигнал с задатчика отрицательного сигнала ЗОТ, на второй и третий входы каждого кворум-элемента поступают положительные сигналы, пропорциональные временам прогноза tni (i=1,...k). Каждый кворум-элемент выбирает средний из входных сигналов. Так как один из входных сигналов отрицательный, то на выходе каждого кворум-элемента сигнал пропорционален наименьшему из двух входных сигналов, пропорциональных временам прогнозирования. Пусть время Δt4 минимальное из всех сигналов Δti=tpi-tni, (i=1,...k). Тогда на выходе кворум-элемента КЭ3 это время будет уже выбрано как минимальное из четырех входных сигналов Δti=tpi-tni, (i=1,...4) и далее останется также минимальным. В результате на выходе элемента выбора минимального из k значений 9 сигнал равен минимальному из входных сигналов Δti=tpi-tni, (i=1,...k), поступающих с блока суммирования 6. Задатчик отрицательного сигнала ЗОТ реализуется с помощью потенциометрического датчика (см. “Системы автоматического управления”, часть 1. Кейн В.М., Красов А.И., Федоров С.М. Л.: ОЛАГА, 1978, стр. 19-22). Кворум-элементы Kэi (i=1,...k-1) являются также известными устройствами (см. Автоматизированное управление самолетами и вертолетами. /Под ред. С.М.Федорова, M.: Транспорт, 1977, стр. 166-169).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВИБРОАКУСТИЧЕСКОЙ ДИАГНОСТИКИ ЦИКЛИЧЕСКИ ФУНКЦИОНИРУЮЩИХ ОБЪЕКТОВ | 2005 |
|
RU2289802C1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ ФУНКЦИЙ УПРАВЛЕНИЯ ВОЗДУШНЫМ СУДНОМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2606153C2 |
| СПОСОБ ИЗМЕРЕНИЯ МАССЫ МАТЕРИАЛА ПРИ ДОЗИРОВАНИИ | 1989 |
|
SU1826711A1 |
| Устройство для обнаружения опасной загазованности объекта | 1976 |
|
SU590793A1 |
| Устройство двухуровневого прогнозирования технического состояния радиотехнических объектов | 1988 |
|
SU1509938A1 |
| Способ определения остаточного ресурса деталей машин | 2019 |
|
RU2733105C1 |
| Устройство для моделирования процесса поддержания сложного технического объекта в готовности к применению по назначению | 2019 |
|
RU2718967C1 |
| СПОСОБ АДАПТИВНОГО ПРОГНОЗИРОВАНИЯ ОСТАТОЧНОГО РЕСУРСА ЭКСПЛУАТАЦИИ СЛОЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2533321C1 |
| СПОСОБ ПОИСКА ДЕФЕКТОВ В ЦИФРОВЫХ БЛОКАХ | 2003 |
|
RU2255369C1 |
| Устройство для контроля параметров | 1979 |
|
SU911540A2 |
Изобретение относится к средствам технической диагностики и может быть использовано в системах контроля технического состояния сложных объектов, например, изделий авиационной техники. Техническим результатом является повышение оперативности и объективности результатов диагностирования сложных технических объектов. Указанный технический результат достигается за счет того, что устройство содержит блоки прогнозирования параметров состояния объекта, блок определения выхода контролируемых параметров за допустимые значения, блок вычисления вероятностей безотказной работы функциональных блоков объекта. 13 ил.
Устройство для диагностирования объекта, состоящее из объекта диагностирования, блока суммирования, блока преобразования и хранения значений контролируемых параметров состояния объекта, блока ключей, элемента ИЛИ, отличающееся тем, что устройство содержит блок регистрации времен наработки функциональных блоков контролируемого объекта, блок задания времен ресурса функциональных блоков, генератор тактовых импульсов, блок задания периода следования тактовых импульсов, двух элементов задержки времени, элемент выбора минимального значения разности ресурса и наработки, блок прогнозирования параметров состояния, блок вычисления времени прогноза, блок вычисления текущих времен наработки, блок определения выхода контролируемых параметров за допустимые значения и блок вычисления вероятностей безотказной работы функциональных блоков контролируемого объекта, причем выходы блока регистрации времени наработки функциональных блоков контролируемого объекта к моменту очередного включения устройства и контролируемого объекта соединены с соответствующими входами блока вычисления текущих времен наработки функциональных блоков контролируемого объекта и соответствующими входами блока суммирования, причем вторые входы блока суммирования соединены с соответствующими выходами блока задания времен ресурса функциональных блоков контролируемого объекта, а выходы блока суммирования соединены с входами элемента выбора минимального значения разности времен ресурса и наработки, выход которого соединен с первым входом блока вычисления времени прогноза параметров состояния объекта, второй вход которого соединен с выходом первого элемента задержки времени, со вторым входом блока преобразования и хранения значений каждого из контролируемых параметров состояния объекта, со вторым входом блока вычисления текущих времен наработки функциональных блоков контролируемого объекта, со вторым входом блока прогнозирования параметров состояния контролируемого объекта и с входом второго элемента задержки времени, выход генератора тактовых импульсов соединен с входом первого элемента задержки времени, выход блока задания периода следования тактовых импульсов соединен с третьим входом блока вычисления времени прогноза параметров состояния объекта и с третьим входом блока вычисления текущих времен наработки функциональных блоков контролируемого объекта, выход блока вычисления времени прогноза параметров состояния объекта соединен с третьим входом блока прогнозирования параметров состояния контролируемого объекта, первые входы которого соединены с соответствующими выходами блока преобразования и хранения значений каждого из контролируемых параметров состояния объекта, первые входы которого соединены с соответствующими выходами контролируемых параметров объекта, выход второго элемента задержки времени соединен с первым входом блока определения выхода контролируемых параметров за допустимые значения, вторые входы которого соединены с соответствующими выходами блока прогнозирования параметров состояния контролируемого объекта, выходы блока определения выхода контролируемых параметров за допустимые значения соединены с входами элемента ИЛИ, выход которого соединен со вторым входом блока ключей, первые входы которого соединены с соответствующими выходами блока вычисления текущих времен наработки функциональных блоков контролируемого объекта, выходы блока ключей соединены с соответствующими входами блока вычисления вероятностей безотказной работы функциональных блоков контролируемого объекта.
| Способ диагностирования объекта, состоящего из последовательно соединенных функциональных блоков, охваченных обратными связями, и устройство для его осуществления | 1989 |
|
SU1667013A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ИЗДЕЛИЯ | 1992 |
|
RU2018915C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИРОВАНИЯ МНОГОСВЯЗНОЙ ТЕНЗОРЕЗИСТОРНОЙ СИСТЕМЫ | 1995 |
|
RU2087856C1 |
| СПОСОБ ПОСТРОЕНИЯ МНОГОПАРАМЕТРИЧЕСКИХ ЦИФРОВЫХ МОДЕЛЕЙ СТРОИТЕЛЬНЫХ ОБЪЕКТОВ, АНАЛИЗА И МОДЕЛИРОВАНИЯ ИХ СОСТОЯНИЯ (ВАРИАНТЫ) | 2001 |
|
RU2177144C1 |
| US 6202070 А, 13.03.2001 | |||
| US 5805897 А, 08.09.1998. | |||

