Изобретение относится к железнодорожной технике, а именно к железнодорожной автоматике, и может быть использовано для регулирования движения поездов.
Известен способ контроля свободности рельсовой линии, заключающийся в том, что определяют количество свободных рельсовых линий на перегоне и сумму напряжений на этих же линиях, а затем находят среднее арифметическое значение напряжений. Текущее значение каждой из линий сравнивают со средним арифметическим значением. При существенном отличии текущего значения от среднего арифметического фиксируют занятость рельсовой линии, в противном случае - свободность [Патент РФ №2025358, МПК B 61 L 23/16. Способ контроля свободности путевых участков и устройство для его осуществления. Полевой Ю.И., Стрельцов С.К., Мазалова И.В., Кравцова Н.А. БИ №24, 1994 г.].
Недостатком этого способа является то, что при наличии значительной продольной асимметрии возможен ложный контроль состояния рельсовой линии.
Известен способ контроля свободности рельсовых линий, заключающийся в том, что значение текущего напряжения на приемнике сравнивают с пороговыми значениями напряжений. При превышении текущего напряжения над пороговым значением фиксируют свободность рельсовой линии, в противном случае - занятость [Котляренко Н.Ф. Путевая блокировка и авторегулировка. - М.: Транспорт, 1983 г., стр.145-159].
Недостатком этого способа является то, что при пониженном сопротивлении изоляции возможен ложный контроль состояния рельсовой линии.
Данное техническое решение выбрано в качестве прототипа.
Сущность изобретения.
Способ контроля свободности рельсовой линии, заключающийся в том, что к одному концу рельсовой линии подключен источник питания, а к другому - приемник и по характеру изменения напряжения на входе приемника фиксируют состояние рельсовой линии, отличающийся тем, что занятие рельсовой линии фиксируют при условии, что отношение напряжения на входе приемника Up(i) рассматриваемой рельсовой линии к одноименному напряжению на входе приемника впереди лежащей рельсовой линии UP(i+1) равно или меньше коэффициента занятия КЗ, а освобождение рассматриваемой рельсовой линии фиксируют при условии, что отношение напряжения на входе приемника UP(i) рассматриваемой рельсовой линии к одноименному напряжению на входе приемника позади лежащей рельсовой линии UP(i-1) равно или больше коэффициента освобождения КO, при этом две позади лежащие рельсовые линии i-1 и i-2 свободны, а впередилежащая i+1 занята, коэффициент занятия КЗ представляет произведение коэффициента снижения напряжения КС на коэффициент запаса при занятии рельсовой линии КЗЗ, а коэффициент освобождения - произведение коэффициента снижения напряжения КС на коэффициент запаса при освобождении рельсовой линии КЗО, коэффициент снижения напряжения КС - отношение напряжения на входе приемника при наложенном нормативном шунте на координате места подключения приемника US к напряжению на входе приемника при отсутствии влияния шунта UN (US/UN), коэффициент запаса при занятии рельсовой линии принят КЗЗ=1,2, коэффициент запаса при освобождении рельсовой линии КЗО=1,4.
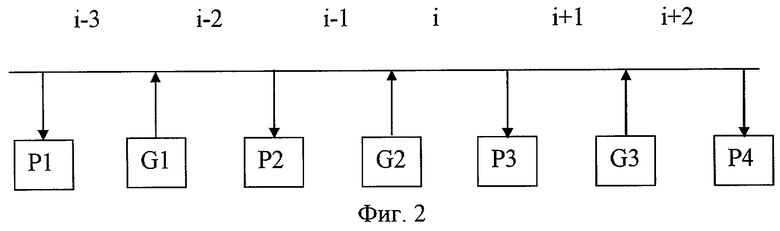
На фиг.1 приведена схема рельсовой цепи. На фиг.2 представлена схема подключения питающих и приемных трансформаторов вдоль перегона.
Предлагаемый способ реализован в приведенной на фиг.1 схеме рельсовой цепи, содержащей путевой генератор 1, соединенный через резисторы 2 (ограничитель тока питающего конца) с входом (Вх) переключающего устройства 3, к выходу которого (Вых1) [выходы Вых2, Вых3 и т.д. на фиг.1 не показаны] через резистор 4 (эквивалент соединительного кабеля сопротивлением от 10 до 400 Ом) и путевой трансформатор 5 подключен вход рельсовой линии 6, к другому концу которой подключен трансформатор приемного конца 7, к выходу которого через резистор 8 (эквивалент сопротивления кабеля) подключен первый вход Вх1 переключающего устройства. К выходу Вых переключающего устройства 3 подключен вход фильтра 9, к выходу которого подключен вход выпрямителя 10, к выходу которого подключен вход аналого-цифрового преобразователя 11, к выходу которого подключен вход ЭВМ 12. Рельсовая линия 13 одним концом подключена к трансформатору 5, а другим - к трансформатору приемного конца 14, выход которого через резистор 15 (эквивалент сопротивления кабеля) подключен ко второму входу (Вх2) переключающего устройства 3. К выходам Вых2, Вых3 и т.д. (на фиг.1 не показаны) подключены питающие концы других рельсовых линий, а к входам Вх3, Вх4 и т.д. (на фиг.1 не показаны) подключены приемные концы других рельсовых линий.
На фиг.2 представлены: рассматриваемая рельсовая линия i, впереди лежащие i+1, i+2 и позади лежащие i-1, i-2 рельсовые линии. Трансформаторы питающих концов G1, G2, G3 предусмотрены для питания соответственно рельсовых линий i-3 и i-2, i-1 и i, i+1 и i+2, трансформаторы приемных концов Р1, Р2, Р3, Р4 предназначены для контроля соответственно рельсовых линий i-3, i-2 и i-1, i и i+1, i+2. Переключающее устройство подключает (фиг.1) генератор 1 поочередно ко всем питающим концам, вместе с тем (синхронно с этим) все приемные концы так же поочередно подключаются к входу ЭВМ 12
В ЭВМ поступают значения напряжений со всех приемных концов рельсовых линий, а фиксация состояний рельсовых линий происходит по следующему алгоритму. Занятие рельсовой линии i будет зафиксировано, если напряжение приемного конца этой рельсовой линии будет ниже напряжение приемного конца рельсовой линии i+1 в КЗ раз, а освобождение рассматриваемой рельсовой линии i фиксируют при условии, что отношение напряжения на входе приемника рассматриваемой i рельсовой линии к одноименному напряжению на входе приемника позади лежащей рельсовой линии i-1 равно или больше коэффициента освобождения КO, при этом две позади лежащие рельсовые линии i-1 и i-2 свободны, а впередилежащая - i+1 занята.
Предложенное устройство позволяет повысить безопасность движения за счет достоверного контроля состояния рельсовой линии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ | 2009 |
|
RU2415770C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЙ РАЗВЕТВЛЕННОЙ РЕЛЬСОВОЙ ЦЕПИ В ГОРЛОВИНАХ СТАНЦИИ | 2019 |
|
RU2723529C1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ РЕЛЬСОВОЙ ЛИНИИ | 2006 |
|
RU2334640C2 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ ПУТЕВЫХ УЧАСТКОВ | 2007 |
|
RU2334642C1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОГО СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ | 2005 |
|
RU2286276C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЙ РЕЛЬСОВЫХ ЛИНИЙ | 2020 |
|
RU2737251C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ | 2005 |
|
RU2294856C1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ РЕЛЬСОВОЙ ЛИНИИ | 2006 |
|
RU2333126C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ПУТЕВЫХ УЧАСТКОВ | 2009 |
|
RU2410267C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ | 2010 |
|
RU2423268C1 |
Изобретение относится к железнодорожной технике, а именно к железнодорожной автоматике и телемеханике для интервального регулирования движения поездов. Способ заключается в том, что к одному концу рельсовой линии подключен источник питания, а к другому - приемник и по характеру изменения напряжения на входе приемника фиксируют состояние рельсовой линии. Занятие рельсовой линии фиксируют при условии, что отношение напряжения на входе приемника UP(i) рассматриваемой рельсовой линии к одноименному напряжению на входе приемника впереди лежащей рельсовой линии UP(i+1) равно или меньше коэффициента занятия КЗ. Освобождение рельсовой линии фиксируют при условии, что отношение напряжения на входе приемника UP(i) рассматриваемой рельсовой линии к одноименному напряжению на входе приемника позади лежащей рельсовой линии UP(i-1) равно или больше коэффициента освобождения КO, при этом две позади лежащие рельсовые линии i-1 и i-2 свободны, а впередилежащая i+1 занята. Изобретение позволяет повысить безопасность движения за счет достоверного контроля состояния рельсовой линии. 2 ил.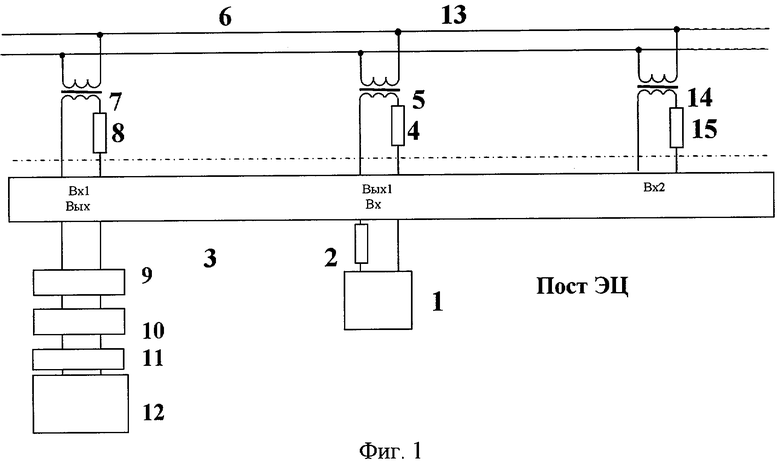
Способ контроля свободности рельсовой линии, заключающийся в том, что к одному концу рельсовой линии подключен источник питания, а к другому - приемник и по характеру изменения напряжения на входе приемника фиксируют состояние рельсовой линии, отличающийся тем, что занятие рельсовой линии фиксируют при условии, что отношение напряжения на входе приемника UP(i) рассматриваемой рельсовой линии к одноименному напряжению на входе приемника впереди лежащей рельсовой линии UP(i+1) равно или меньше коэффициента занятия КЗ, а освобождение рассматриваемой рельсовой линии фиксируют при условии, что отношение напряжения на входе приемника UP(i) рассматриваемой рельсовой линии к одноименному напряжению на входе приемника позади лежащей рельсовой линии UP(i-1) равно или больше коэффициента освобождения КO, при этом две позади лежащие рельсовые линии i-1 и i-2 свободны, а впереди лежащая i+1 занята, коэффициент занятия КЗ представляет произведение коэффициента снижения напряжения КC на коэффициент запаса при занятии рельсовой линии КЗЗ, а коэффициент освобождения - произведение коэффициента снижения напряжения КC на коэффициент запаса при освобождении рельсовой линии КЗО, коэффициент снижения напряжения КC - отношение напряжения на входе приемника при наложенном нормативном шунте на координате места подключения приемника US к напряжению на входе приемника при отсутствии влияния шунта UN, коэффициент запаса при занятии рельсовой линии принят КЗЗ=1,2, коэффициент запаса при освобождении рельсовой линии КЗО=1,4.
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ ПУТЕВЫХ УЧАСТКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2025358C1 |
| Рельсовая цепь | 1991 |
|
SU1799784A1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОГО СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ | 2000 |
|
RU2185300C2 |
| КОТЛЯРЕНКО Н.Ф., Путевая блокировка и авторегулировка | |||
| - М.: Транспорт, 1983, стр.145-159. | |||

