Изобретение относится к области машиностроения, а именно к машинам и механизмам, использующим управляемый электромагнитный подвес ротора, и может найти применение при создании роторных механизмов на электромагнитных опорах.
Известен способ управления электромагнитным подвесом ротора, описанный в патенте US №6472787 "Controller of Magnetic Bearing", кл. F 16 C 32/04, опубл. 29.10.2002 г., технический результат которого заключается в обеспечении устойчивости системы на собственных частотах колебаний ротора путем применения настраиваемого по частоте вращения ротора режекторного фильтра.
Основным недостатком указанного способа является то, что способ, примененный для стабилизации системы на собственных частотах колебаний ротора, обеспечивает работу регулятора лишь при изменении собственных частот ротора от скорости его вращения. Однако стабилизация ротора на этих частотах не обеспечивается при их изменении из-за нагрузки машины или при изменении температуры, т.е. из-за изменений, носящих случайный характер. Кроме того, в предложенной системе отсутствует фильтрация сигнала датчика положения ротора перед аналого-цифровым преобразователем (АЦП), то есть антиалайзинговый фильтр.
Известно устройство управления электромагнитным подвесом ротора, описанное в патенте РФ №2181903 "Цифровой регулятор для системы управления электромагнитным подвесом ротора", кл. G 05 B 11/26, опубл. 27.04.2002 г., Бюл. №12. Цифровой регулятор содержит пять регистров, пять сумматоров, мультиплексор с запоминанием, блоки с ограничением, триггер знака, генераторы прямоугольных импульсов, блок синхронизации. Регулятор реализован на дискретных логических элементах и позволяет формировать алгоритм управления для одного из каналов системы магнитного подвеса.
Основным недостатком этого регулятора является то, что при применении предложенной функциональной схемы возникают существенные затруднения в обеспечении устойчивости системы на частотах собственных форм колебаний ротора или корпуса машины.
Наиболее близкой к заявляемым способу управления электромагнитными подшипниками и устройству по техническому решению является система управления, описанная в патенте РФ №2181922 "Система управления электромагнитным подвесом ротора", кл. Н 02 Р 6/16, опубл. 27.04.2002 г., Бюл. №12, технический результат которой заключается в упрощении технической реализации системы управления электромагнитным подвесом ротора.
Основными недостатками способа управления и устройства, построенного в соответствии с указанной системой, является использование в регуляторе канала только части обращенной модели электромагнита, а также практическая непригодность способа для реализации регулирующей части предложенной системы на базе цифрового регулятора. Практическая непригодность способа для реализации регулирующей части предложенной системы на базе цифрового регулятора выражается в том, что при выполнении функциональной схемы предложенной системы, а также ее реализация в соответствии со структурной схемой канала управления между датчиком положения ротора и интегральным регулятором, реализованным на микросхемах серии КР 1533Ю, не предусмотрен антиалайзинговый фильтр, который предназначен для устранения многозначности аналого-цифрового преобразования. Установка такого фильтра в указанную систему внесет сильные искажения в результирующую фазовую характеристику канала системы управления и сделает предложенную структурную схему практически неработоспособной. Кроме того, при реализации указанной системы возникнут существенные затруднения в обеспечении ее устойчивости на частотах собственных форм колебаний ротора или корпуса машины.
Техническая задача заявляемого технического решения - уменьшение уровня шумов, действующих в канале регулирования с одновременным сохранением необходимых характеристик канала, а также эффективное обеспечение устойчивости системы магнитного подвеса на частотах собственных форм колебаний ротора или корпуса машины.
Технический результат достигается в способе управления электромагнитными подшипниками, при котором формирование токов осуществляют в двух частотных областях - низкочастотной и высокочастотной, причем в низкочастотной области формируют токи посредством цифрового контроллера или отдельных контроллеров по каналам управления, а в высокочастотной области для формирования токов организуют аналоговые фильтры низких частот, выполняющие также функции антиалайзингового фильтра АЦП цифрового контроллера. В цифровом регуляторе организуют два параллельных канала регулирования, причем в одном канале организуют пропорционально-дифференциальное регулирование и компенсацию постоянной времени электромагнита, а во втором канале организуют интегральное регулирование и компенсацию отрицательной жесткости электромагнита, причем суммируют сигналы этих каналов только на выходе цифрового регулятора. В канале регулирования организуют один или несколько цифровых режекторных фильтров и настраивают их ниже частоты собственных механических колебаний роторной системы.
Техническая задача решается также в устройстве, содержащем датчик положения ротора, интегральный регулятор, блок перемножения, форсирующий регулятор, силовой преобразователь, причем на входе интегрального регулятора, состоящего из блоков пропорционально-дифференциального и интегрального регулирования и блока первого сумматора, установлены блок аналого-цифрового преобразователя с предвключенным блоком фильтра низких частот, а на выходе форсирующего регулятора установлен режекторный фильтр или группа режекторных фильтров, блок второго сумматора, блок инвертирования и блоки формирования сигналов широтно-импульсной модуляции, причем выход предвключенного блока фильтра низких частот соединен со входом блока аналого-цифрового преобразователя, выход которого соединен со входами блоков пропорционально-дифференциального и интегрального регулирования и первым входом блока перемножения, выход блока пропорционально-дифференциального регулирования соединен со входом блока форсирующего регулятора, выход блока форсирующего регулятора соединен со входом блока режекторных фильтров, выход которого соединен с первым входом блока второго сумматора, а выход блока второго сумматора соединен со входом блока формирования сигналов широтно-импульсной модуляции с возможностью управления силовым преобразователем, причем в интегральном регуляторе блоки пропорционально-дифференциального и интегрального регулирования разделены, выход блока интегрального регулирования соединен со вторым входом блока перемножения и вторым входом блока второго сумматора.
На фиг.1 представлены частотные характеристики системы магнитного подвеса.
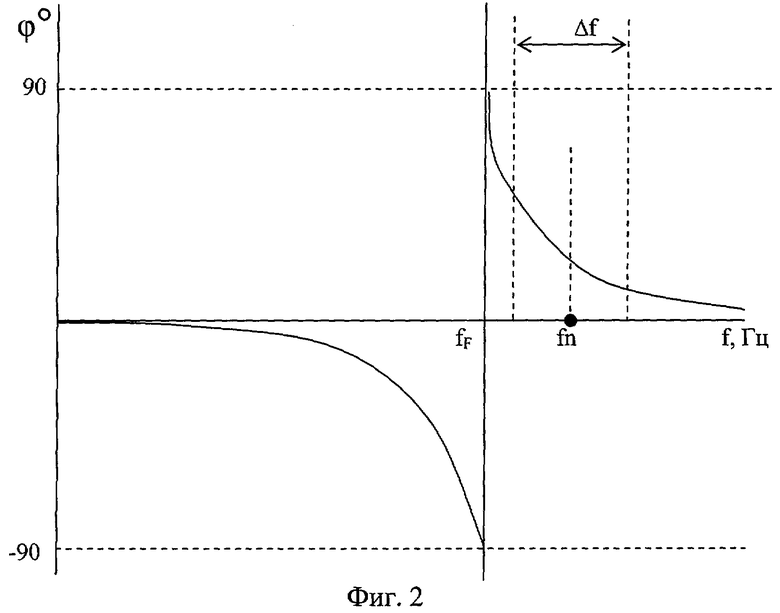
На фиг.2 представлена фазо-частотная характеристика режекторного фильтра.
На фиг.3 - схема устройства для реализации заявляемого способа управления электромагнитными подшипниками.
Реализацию заявляемого способа управления электромагнитными подшипниками осуществляют следующим образом.
На фиг.1 представлены амплитудно-частотная (А) и фазочастотная (ϕ) характеристики канала управления электромагнитным подшипником. Формирование токов, необходимых для стабилизации ротора в пространстве, осуществляют в двух частотных областях (f). Первая (низкочастотная) область охватывает зону I, перекрывающую частоты основных колебаний ротора и корпуса машины, определяемые массой и экваториальным моментом ротора и жесткостью каналов электромагнитного подшипника (как правило, ширина этого диапазона не превышает сотен герц). Формирование токов на этом участке реализуют цифровой частью контроллера и описывают передаточной функцией:

где W - передаточная функция цифровой части цифрового регулятора;
K - статический коэффициент передачи;
τ1 - постоянная времени первого дифференцирования;
Т - постоянная времени апериодического звена;
Ti - постоянная времени интегрирующего звена;
τ2 - постоянная времени цепи компенсации постоянной времени электромагнита;
p - оператор Лапласа.
Вторая (высокочастотная) область соответствует зоне II (фиг.1), в ней организуют аналоговые фильтры низких частот и формируют токи, необходимые для стабилизации ротора в пространстве. Передаточная функция аналогового фильтра низких частот может иметь следующий вид, например:
где Wa - передаточная функция аналогового фильтра;
Та - постоянная времени апериодического звена аналогового фильтра;
p - оператор Лапласа.
С помощью этого организованного фильтра формируют спад частотной характеристики регулятора в зоне II (фиг.1).
Для устранения повышения уровней шумов, возникающих при последовательной обработке дискретизированного входного сигнала датчика положения ротора, дифференцирующими элементами регулятора и перемножителя разделяют пути прохождения сигналов пропорционально-дифференциальной и интегральной частей регулятора. При этом суммируют сигналы обоих путей на выходе регулятора, а посредством цепи компенсации (отрицательной жесткости электромагнита) перемножают выходной сигнал АЦП только с выходным сигналом интегрирующей части интегрального регулятора. При такой реализации общего закона регулирования существенно снижают уровень шумов на выходе перемножителя за счет уменьшения комбинационных составляющих шумов квантования АЦП, усиленных пропорционально-дифференциальными частями регулятора. Кроме того, значительно снижают уровень шумов на выходе форсирующего регулятора, так как он не воспринимает шумы квантования интегрирующей части интегрального регулятора.
Возможность реализации заявляемого способа подтверждается тем, что для крупных промышленных роторных систем основной составляющей выходного сигнала регулятора, определяющей значение тока и соответственно отрицательной жесткости электромагнита, является сигнал интегрирующей части интегрального регулятора. Это объясняется тем, что основная часть усилия, развиваемого электромагнитом, определяется постоянной величиной - весом ротора, и происходящие на этом фоне кратковременные смещения ротора, вызванные внешними воздействиями на ротор, например, дисбалансом или газодинамическими усилиями, оказываются значительно меньше радиального зазора в электромагнитном подшипнике.
Для стабилизации системы магнитного подвеса на частотах собственных колебаний ротора или корпуса машины в составе цифрового регулятора организуют один или несколько режекторных фильтров и настраивают их относительно собственной частоты механической части машины, тем самым создают дополнительный запас по фазе в каналах регулирования на этой частоте. Передаточная функция такого фильтра может иметь, например, следующий вид:

где W - передаточная функция цифровой части цифрового регулятора;
KF - коэффициент передачи режекторного фильтра;
τF - постоянная времени режекторного фильтра;
p - оператор Лапласа.
Фазовая характеристика такого фильтра (фиг.2) показывает, что настройка резонансной частоты фильтра fF несколько ниже частоты какой-либо формы колебаний машины fn, позволяет создать в регуляторе дополнительный запас по фазе, обеспечиваемый в определенной полосе частот Δf. Таким образом, изменение в некоторых пределах собственной частоты механической части машины не приводит к потере устойчивости системы, стабилизированной указанным способом на этой частоте.
Таким образом, при реализации заявляемого способа, с одной стороны, в полной мере обеспечивают в основной рабочей области регулирования системы магнитного подвеса гибкость и стабильность характеристик, присущих цифровому способу регулирования, с другой стороны, совмещают функции формирования требуемых характеристик регулирования в области высоких частот с функциями антиалайзингового фильтра, а также снижают уровень внутренних шумов цифрового регулятора за счет разделения блоков пропорционально-дифференциального и интегрального регуляторов, практически не ухудшая точности его работы, а за счет организации одного или нескольких цифровых режекторных фильтров и настройки его ниже частоты собственных механических колебаний роторной системы эффективно стабилизируют систему магнитного подвеса на частотах собственных колебаний ротора и корпуса машины.
Устройство, реализующее заявляемый способ управления электромагнитными подшипниками (фиг.3), содержит датчик 1 положения ротора, блок фильтра низких частот 2, блок АЦП 3, блок перемножения 8 с первым (а) и вторым (b) входами, форсирующий регулятор 9, блок режекторных фильтров 10, блок второго сумматора 11 с первым (а) и вторым (b) входами, блок инвертирования 12, блоки формирования сигналов широтно-импульсной модуляции 13 и 14 с первыми (а) и вторыми (b) входами, силовой преобразователь 15, а также интегральный регулятор 16, состоящий из блоков пропорционального 4 и дифференциального 5 регулирования, блока первого сумматора 7 и блока интегрального регулирования 6.
Работа устройства заключается в следующем. Сигнал датчика 1 положения ротора подают на вход предвключенного фильтра низких частот 2, осуществляющего ограничение полосы частот сигнала, подаваемого на вход блока АЦП 3. Сигнал с выхода блока АЦП передают на блок интегрального регулятора 16 и первый (а) вход блока перемножения 8, на второй (b) вход которого передают сигнал с выхода блока интегрального регулирования 6 интегрального регулятора 16.
Сигнал с выходов блоков пропорционального и дифференциального регулирования 4,5 через блок первого сумматора 7 подают на вход форсирующего регулятора 9, сигнал с выхода которого передают на блок режекторных фильтров 10.
Блок второго сумматора 11 производит суммирование сигнала блока режекторных фильтров 10, подаваемого на второй (b) вход блока второго сумматора 11, и сигнала, подаваемого на первый (а) вход блока второго сумматора, блока интегрального регулирования 6 интегрального регулятора 16. С выхода блока второго сумматора 11 сигнал передают на первый (а) вход блока формирования сигналов широтно-импульсной модуляции 13 и через блок инвертирования 12 на первый (а) вход блока формирования сигналов широтно-импульсной модуляции 14, причем на вторые (b) входы блоков 13 и 14 передают сигнал с выхода блока перемножения 8.
Блоки формирования сигналов широтно-импульсной модуляции 13 и 14 формируют сигнал управления силовым преобразователем 15, на выходах которого подключают обмотки электромагнитов каналов управления (на фиг.3 не показаны).
Таким образом, путем применения предвключенного фильтра низких частот 2 на входе блока аналого-цифрового преобразователя 3 и разделения блоков интегрального регулирования 6 и пропорционально-дифференциального регулирования 4, 5 с подключением выхода блока интегрального регулирования 6 на вход блока перемножения 8 и блок второго сумматора 11 достигают уменьшения уровня шумов, действующих в канале регулирования, практически без изменения основных рабочих характеристик канала. Наличие блока режекторных фильтров 10 позволяет обеспечить устойчивость системы на частотах собственных форм колебаний ротора и корпуса машины, причем включение этого блока непосредственно перед блоком второго сумматора 11 позволяет производить фильтрацию на высоких уровнях сигнала, что повышает точность работы канала регулирования и уменьшает уровень его шумов. Включение в состав канала регулирования блока перемножения 8 позволяет полностью компенсировать отрицательную жесткость электромагнита, определяемую основной составляющей его рабочего тока.
Использование заявляемого способа управления электромагнитными подшипниками и устройства для его осуществления в цифровых регуляторах аппаратуры управления электромагнитными подшипниками системы магнитного подвеса повышает эксплуатационные характеристики нагнетателей, в частности помпажную стойкость, по сравнению с ранее применявшейся аналоговой системой управления.
Правильность заявляемого технического решения подтверждена длительными эксплуатационными испытаниями нагнетателей НЦ-16 с электромагнитными подшипниками ротора с аппаратурой управления типа АМП, эксплуатируемой в настоящее время на КС-23А Сызранского ЛПУ МГ OOO "Самаратрансгаз".
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2015 |
|
RU2589718C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2007 |
|
RU2345464C1 |
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2000 |
|
RU2181903C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2008 |
|
RU2395150C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2008 |
|
RU2375736C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 1999 |
|
RU2181922C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2011 |
|
RU2460909C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2014 |
|
RU2566671C1 |
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2010 |
|
RU2433443C1 |
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2009 |
|
RU2417390C2 |

Изобретение относится к машинам и механизмам, использующим управляемый электромагнитный подвес ротора. Технический результат - уменьшение уровня шумов, действующих в канале регулирования и сохранение необходимых характеристик канала, обеспечение устойчивости системы магнитного подвеса на частотах собственных форм колебаний ротора или корпуса машины. В данном способе управления электромагнитными подшипниками формирование токов, необходимых для стабилизации ротора в пространстве, осуществляют в двух частотных областях - низкочастотной и высокочастотной. В низкочастотной области формируют токи посредством цифрового контроллера или отдельных контроллеров по каналам управления. В высокочастотной области для формирования токов организуют аналоговые фильтры низких частот, выполняющие также функции антиалайзингового фильтра аналого-цифрового преобразователя цифрового контроллера. В цифровом регуляторе организуют два параллельных канала регулирования, в одном из которых организуют пропорционально-дифференциальное регулирование и компенсацию постоянной времени электромагнита, а во втором - интегральное регулирование и компенсацию отрицательной жесткости электромагнита, причем суммируют сигналы этих каналов только на выходе цифрового регулятора. В канале регулирования организуют один или несколько цифровых режекторных фильтров и настраивают их ниже соответствующих частот собственных механических колебаний роторной системы. Способ реализуют в устройстве, содержащем датчик положения ротора, интегральный регулятор, блок перемножения, форсирующий регулятор, силовой преобразователь, причем на входе интегрального регулятора, состоящего из блоков пропорционально-дифференциального и интегрального регулирования и блока первого сумматора, установлены блок аналого-цифрового преобразователя с предвключенным блоком фильтра низких частот, а на выходе форсирующего регулятора установлен режекторный фильтр или группа режекторных фильтров, блок второго сумматора, блок инвертирования и блоки формирования сигналов широтно-импульсной модуляции. Использование данных изобретений в цифровых регуляторах аппаратуры управления электромагнитными подшипниками системы магнитного подвеса повышает эксплуатационные характеристики нагнетателей, в частности, помпажную стойкость. 2 н. и 2 з.п. ф-лы, 3 ил.
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 1999 |
|
RU2181922C2 |
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2000 |
|
RU2181903C2 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| US 5552682 А, 03.09.1996. | |||

