Изобретение относится к автоматизированным системам регулирования с цифровым управлением и может найти применение в машиностроении при создании роторных механизмов на электромагнитных опорах.
Наиболее близким по технической сущности является цифровой регулятор для системы управления электромагнитным подвесом ротора (см. патент Российской Федерации №2181903, опубл. в БИ №12, 27.04.2002), содержащий пять регистров, пять сумматоров, мультиплексор с запоминанием, триггер знака, два блока ограничения, два генератора прямоугольных импульсов и блок синхронизации.
Недостатком наиболее близкого цифрового регулятора является низкое быстродействие системы управления электромагнитным подвесом ротора.
Сущность изобретения заключается в том, что в цифровой регулятор для системы управления электромагнитным подвесом ротора, содержащий первый, второй, третий, четвертый и пятый регистры, первый, второй, третий, четвертый и пятый сумматоры, мультиплексор с запоминанием, триггер знака, первый и второй блоки ограничения, первый и второй генераторы прямоугольных импульсов и блок синхронизации, причем первые входы первого регистра и блока синхронизации являются входом цифрового регулятора, выход первого регистра соединен с первыми входами первого и второго сумматоров и первого блока ограничения, выход первого сумматора соединен с первым входом второго регистра, выход которого соединен с вторыми входами первого и второго сумматоров и первого блока ограничения, выход второго сумматора соединен с первым входом третьего регистра, выход четвертого регистра соединен с первым входом пятого регистра, выход третьего сумматора соединен с первым входом четвертого сумматора, выход которого соединен с первым входом мультиплексора с запоминанием и входом второго блока ограничения, старший разряд выхода четвертого сумматора соединен с первым входом триггера знака, первый и второй выходы второго блока ограничения соединены соответственно с вторым и третьим входами мультиплексора с запоминанием, выходы первого и второго генераторов прямоугольных импульсов соединены соответственно с вторым и третьим входами блока синхронизации, первый, второй, третий, четвертый, пятый, шестой и седьмой выходы которого соединены соответственно с вторыми входами первого, второго, третьего и пятого регистров, четвертым входом мультиплексора с запоминанием, вторым входом триггера знака и первым входом четвертого регистра, выход первого блока ограничения соединен с четвертым входом блока синхронизации, причем выходы мультиплексора с запоминанием и триггера знака являются выходом цифрового регулятора, дополнительно введены третий генератор прямоугольных импульсов, шестой сумматор и шестой и седьмой регистры, причем выход третьего регистра соединен с первым входом пятого сумматора, выход которого соединен с вторым входом четвертого регистра, выход первого регистра соединен с первыми входами шестого сумматора и шестого регистра, инверсный выход которого соединен с вторым входом шестого сумматора, выход шестого сумматора соединен с первым входом седьмого регистра, выход которого соединен с вторым входом пятого сумматора, инверсный выход пятого регистра соединен с первым входом третьего сумматора, выход четвертого регистра соединен с вторыми входами третьего и четвертого сумматоров, выход третьего генератора прямоугольных импульсов соединен с пятым входом блока синхронизации, восьмой и девятый выходы которого соединены соответственно с вторыми входами шестого и седьмого регистров.
Существенные отличия находят свое выражение в новой совокупности связей между элементами устройства. Указанная совокупность связей позволяет повысить быстродействие системы управления электромагнитным подвесом ротора.
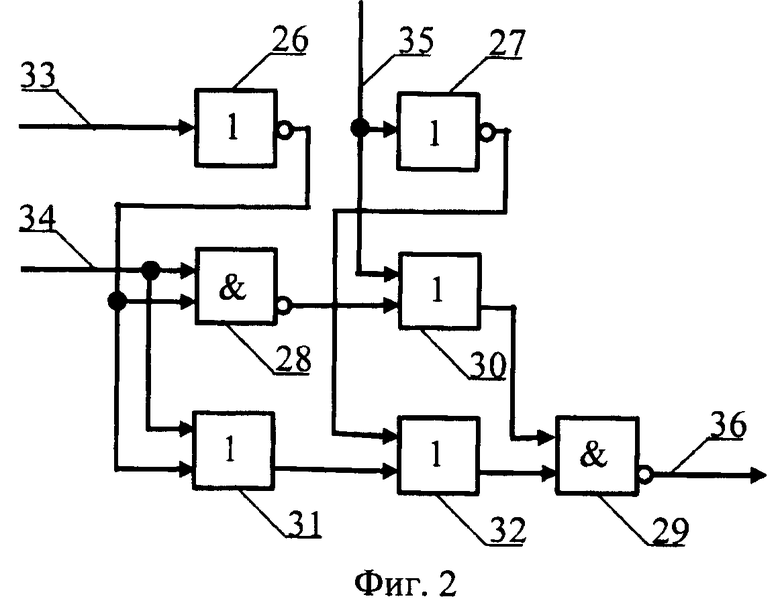
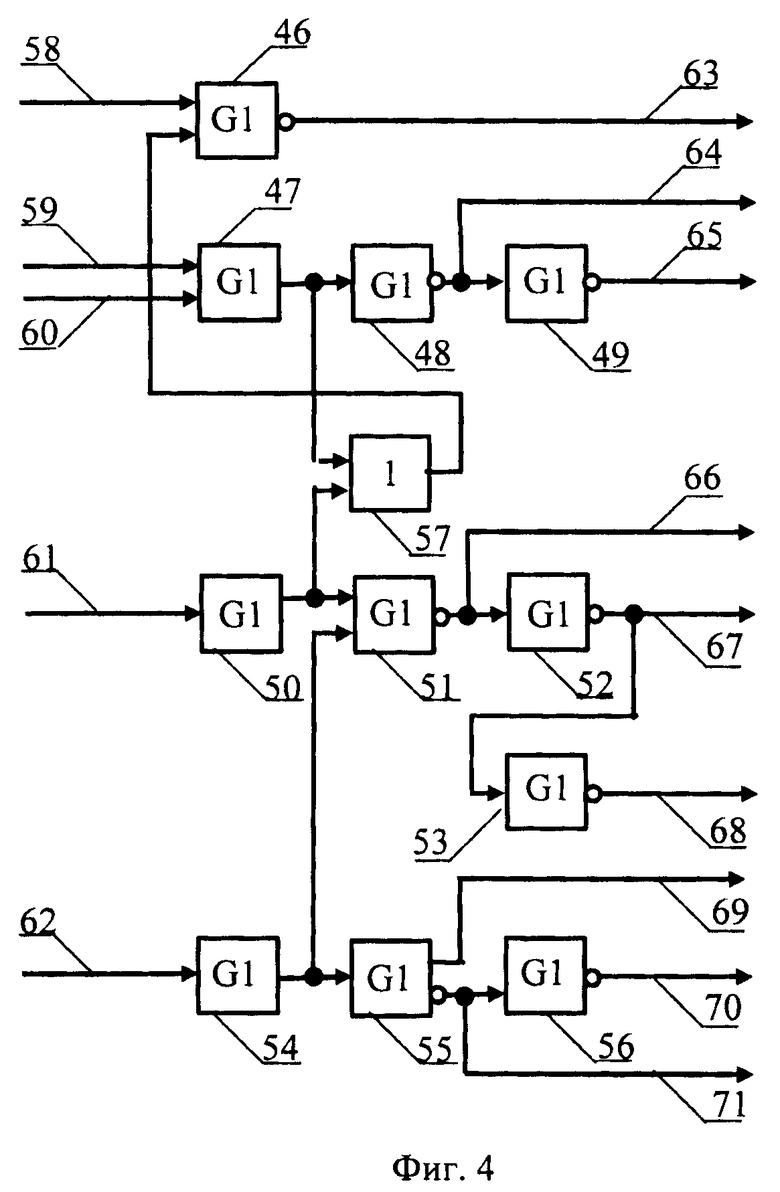
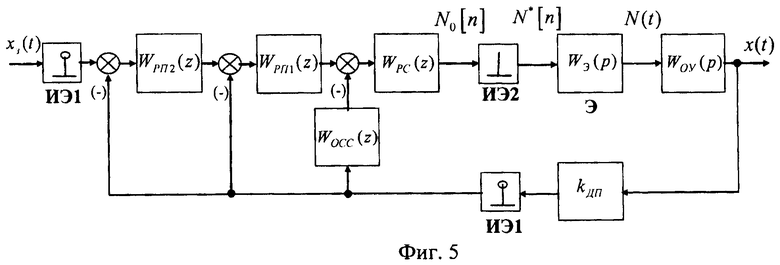
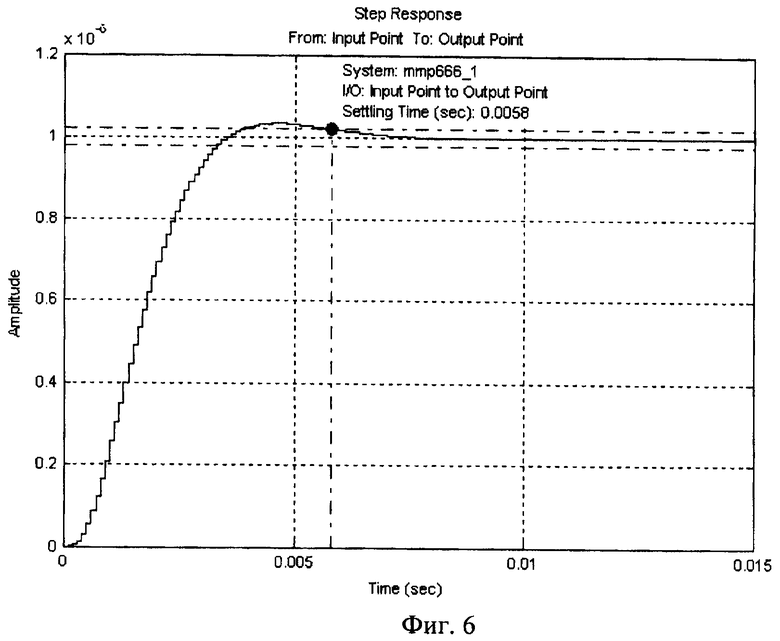
На фиг.1 представлена функциональная схема цифрового регулятора для системы управления электромагнитным подвесом ротора; на фиг.2 - функциональная схема первого блока ограничения; на фиг.3 - функциональная схема второго блока ограничения; на фиг.4 - функциональная схема блока синхронизации; на фиг.5 - структурная схема цифровой системы управления электромагнитным подвесом ротора; на фиг.6 - график переходного процесса в системе управления электромагнитным подвесом ротора с предложенным цифровым регулятором.
Цифровой регулятор для системы управления электромагнитным подвесом ротора (фиг.1) содержит регистры 1, 2, 3, 4, 5, 6 и 7, сумматоры 8, 9, 10, 11, 12 и 13, мультиплексор 14 с запоминанием, триггер 15 знака, блоки 16 и 17 ограничения, генераторы 18, 19 и 20 прямоугольных импульсов, блок 21 синхронизации, шину 22 входного сигнала, вход 23 стробирования, шину 24 выходного сигнала, шину 25 знака выходного сигнала. Первые входы регистра 1 и блока 21 синхронизации являются соответственно шиной 22 входного сигнала и входом 23 стробирования цифрового регулятора. Выход регистра 1 соединен с первыми входами сумматоров 8 и 9 и блока 16 ограничения. Выход сумматора 8 соединен с первым входом регистра 2, выход которого соединен с вторыми входами сумматоров 8 и 9 и блока 16 ограничения. Выход сумматора 9 соединен с первым входом регистра 3. Выход регистра 4 соединен с первым входом регистра 5. Выход сумматора 11 соединен с первым входом сумматора 12, выход которого соединен с первым входом мультиплексора 14 с запоминанием и входом блока 17 ограничения. Старший разряд выхода сумматора 12 соединен с первым входом триггера 15 знака. Первый и второй выходы блока 17 ограничения соединены соответственно с вторым и третьим входами мультиплексора 14 с запоминанием. Выходы генераторов 18 и 19 прямоугольных импульсов соединены соответственно с вторым и третьим входами блока 21 синхронизации, первый, второй, третий, четвертый, пятый, шестой и седьмой выходы которого соединены соответственно с вторыми входами регистров 1, 2, 3 и 5, четвертым входом мультиплексора 14 с запоминанием, вторым входом триггера 15 знака и первым входом регистра 4. Выход блока 16 ограничения соединен с четвертым входом блока 21 синхронизации. Выход регистра 3 соединен с первым входом сумматора 10, выход которого соединен с вторым входом регистра 4. Выход регистра 1 соединен с первыми входами сумматора 13 и регистра 6, инверсный выход которого соединен с вторым входом сумматора 13. Выход сумматора 13 соединен с первым входом регистра 7, выход которого соединен с вторым входом сумматора 10. Инверсный выход регистра 5 соединен с первым входом сумматора 11. Выход регистра 4 соединен с вторыми входами сумматоров 11 и 12. Выход генератора 20 прямоугольных импульсов соединен с пятым входом блока 21 синхронизации, восьмой и девятый выходы которого соединены соответственно с вторыми входами регистров 6 и 7. Выход мультиплексора 14 с запоминанием является шиной 24 выходного сигнала, а выход триггера 15 знака - шиной 25 знака выходного сигнала цифрового регулятора.
Основные блоки цифрового регулятора могут быть выполнены, например, на следующих микросхемах: регистры 1, 2, 3, 4, 5, 6 и 7 - К555ТМ8; сумматоры 8, 9, 10, 11, 12 и 13 - К555ИМ6; мультиплексор 14 с запоминанием - К555КП13; триггер 15 знака - К555ТМ2.
Первый блок 16 ограничения (фиг.2), например, содержит инверторы 26 и 27, элементы И-НЕ 28 и 29, элементы ИЛИ 30, 31 и 32. На вход 33 инвертора 26 подается сигнал со старшего (знакового) разряда выхода регистра 2. Выход инвертора 26 соединен с первыми входами элементов И-НЕ 28 и ИЛИ 31. На вторые входы 34 элементов И-НЕ 28 и ИЛИ 31 подается сигнал с регистра 2 с разряда, определяющего уровень ограничения сигнала на выходе этого регистра. Выход элемента И-НЕ 28 соединен с первым входом элемента ИЛИ 30, выход которого соединен с первым входом элемента И-НЕ 29. На вход 35 инвертора 27 и второй вход элемента ИЛИ 30 подается сигнал со старшего (знакового) разряда выхода регистра 1. Выход элемента ИЛИ 31 соединен с первым входом элемента ИЛИ 32, выход которого соединен с вторым входом элемента И-НЕ 29. Выход инвертора 27 соединен с вторым входом элемента ИЛИ 32. Входы 33 и 34 являются первым входом первого блока 16 ограничения, вход 35 - вторым входом этого блока. Выход 36 элемента И-НЕ 29 является выходом блока 16 ограничения.
Второй блок 17 ограничения (фиг.3), например, содержит инвертор 37, m-входовый элемент И-НЕ 38, m-входовый элемент ИЛИ 39, элементы И 40 и 41, элемент ИЛИ 42. На вход инвертора 37 и первый вход элемента И 40 подается сигнал со старшего (знакового) разряда выхода сумматора 12. В зависимости от значения, на котором должен быть ограничен выходной сигнал цифрового регулятора m старших разрядов (кроме знакового), подаются на m входов элементов И-НЕ 38 и ИЛИ 39. Выход элемента И-НЕ 38 соединен с вторым входом элемента И 40. Выход инвертора 37 соединен с первым входом элемента И 41, второй вход которого соединен с выходом элемента ИЛИ 39. Выход элемента И 40 соединен с первым входом элемента ИЛИ 42, второй вход которого соединен с выходом элемента И 41. Вход инвертора 37 и входы элементов И-НЕ 38 и ИЛИ 39 являются входом 43 блока 17 ограничения. Выход 44 инвертора 37 является первым выходом блока 17 ограничения, а выход 45 элемента ИЛИ 42 - вторым выходом этого блока.
Генераторы 18, 19 и 20 прямоугольных импульсов, например, представляют собой автогенераторы, выполненные на микросхемах К555ЛАЗ с кварцевой стабилизацией, причем выходы автогенераторов подключены к входам делителей частоты, реализованных на двоичных счетчиках, например К555ИЕ7.
Блок 21 синхронизации (фиг.4), например, содержит одновибраторы 46, 47, 48, 49, 50, 51, 52, 53, 54, 55 и 56 и элемент ИЛИ 57. Первый вход 58 одновибратора 46 является первым входом блока 21 синхронизации, на который подается сигнал с входа 23 стробирования цифрового регулятора (сигнал готовности информации на входе регулятора). Инверсный выход одновибратора 46 является первым выходом 63 блока 21 синхронизации. Первый вход 59 одновибратора 47 является вторым входом блока 21 синхронизации и на него подается сигнал с выхода генератора 18 прямоугольных импульсов. Выход одновибратора 47 соединен с входом одновибратора 48 и первым входом элемента ИЛИ 57, выход которого соединен с вторым входом (входом блокировки) одновибратора 46. Инверсный выход одновибратора 48 соединен с входом одновибратора 49 и является вторым выходом 64 блока 21 синхронизации. Инверсный выход одновибратора 49 является третьим выходом 65 блока 21 синхронизации. Вход 61 одновибратора 50 является третьим входом блока 21 синхронизации и на него подается сигнал с выхода генератора 19 прямоугольных импульсов. Второй вход 60 (вход блокировки) одновибратора 47 является четвертым входом блока 21 синхронизации, на который подается сигнал с выхода блока 16 ограничения. Выход одновибратора 50 соединен с первым входом одновибратора 51 и вторым входом элемента ИЛИ 57. Инверсный выход одновибратора 51 соединен с входом одновибратора 52 и является девятым выходом 66 блока 21 синхронизации. Инверсный выход одновибратора 52 соединен с входом одновибратора 53 и является седьмым выходом 67 блока 21 синхронизации. Инверсный выход одновибратора 53 является восьмым выходом 68 блока 21 синхронизации. Вход 62 одновибратора 54 является пятым входом блока 21 синхронизации и на него подается сигнал с выхода генератора 20 прямоугольных импульсов. Выход одновибратора 54 соединен с входом одновибратора 55 и вторым входом (входом блокировки) одновибратора 51. Прямой и инверсный выходы одновибратора 55 является соответственно пятым 69 и шестым 71 выходами блока 21 синхронизации. Инверсный выход одновибратора 55 соединен с входом одновибратора 56, инверсный выход которого является четвертым 70 выходом блока 21 синхронизации.
Цифровой регулятор для системы управления электромагнитным подвесом ротора работает следующим образом. При отклонении ротора от центрального положения на входную шину 22 регулятора поступает цифровой код с датчика положения ротора. По приходу сигнала стробирования на первый вход 23 блока 21 синхронизации этот код записывается в регистр 1. При этом посредством регистров 1 и 2, сумматора 8 и соответствующих связей на выходе регистра 2 начинает формироваться цифровой код, пропорциональный интегралу от отклонения ротора от центрального положения. Величина постоянной времени интегрирования определяется периодом выходного сигнала генератора 18 прямоугольных импульсов, который через блок 21 синхронизации воздействует на вход стробирования регистра 2. Постоянная времени интегрирования определяется также сдвигом выходных разрядов регистров 1 относительно разрядов сумматора 8. Посредством сумматора 9 на выходе регистра 3 формируется сигнал, пропорциональный сумме интеграла и собственно сигнала отклонения ротора. Коэффициент пропорциональности определяется сдвигом выходных разрядов регистров 1 и 2 относительно разрядов сумматора 9. С помощью регистров 1 и 6 и сумматора 13 на выходе регистра 7 формируется сигнал, пропорциональный производной от сигнала датчика положения ротора. Величина постоянной времени дифференцирования определяется периодом выходного сигнала генератора 19 прямоугольных импульсов, который через блок 21 синхронизации воздействует на входы стробирования регистров 1, 6 и 7. Постоянная времени дифференцирования определяется также сдвигом выходных разрядов регистров 1 и 6 относительно разрядов сумматора 13. На выходе сумматора 10 формируется и записывается в регистр 4 по сигналу с блока 21 синхронизации разность между сигналами с выходов регистров 3 и 7. Дальнейшее прохождение сигналов в цифровом регуляторе определяется периодом выходного сигнала генератора 20 прямоугольных импульсов, который через блок 21 синхронизации осуществляет последовательное стробирование мультиплексора 14 с запоминанием, триггера 15 знака и регистра 5. При этом на выходе регулятора 24 и 25, т.е. на выходе мультиплексора 14 с запоминанием и триггера 14 знака, формируется цифровой код, пропорциональный собственно разности между сигналами с выходов регистров 3 и 7 и первой производной от этой разности. Таким образом, регистры 4 и 5, сумматоры 11 и 12, а также мультиплексор 14 с запоминанием и триггер 15 знака осуществляют закон регулирования, соответствующий пропорционально-дифференциальному регулятору. Причем постоянная времени пропорционально-дифференциального регулятора определяется периодом генератора 20 прямоугольных импульсов и сдвигом выходных разрядов регистров 4 и 5 относительно разрядов сумматора 11. Коэффициент передачи пропорционально-дифференциального регулятора определяется сдвигом выходных разрядов сумматора 12 относительно разрядов мультиплексора 14 с запоминанием. В случае превышения выходным сигналом сумматора 12 определенной величины срабатывает блок 17 ограничения, который в зависимости от знака сигнала подает на второй вход мультиплексора 14 с запоминанием сигнал низкого или высокого уровня, а по третьему его входу производит переключение входов мультиплексора. В результате на выходе цифрового регулятора сигнал изменяется в заданных пределах.
Выходной сигнал цифрового регулятора предназначен для управления силовым преобразователем (например, цифровым широтно-импульсным преобразователем, к выходу которого подключены обмотки электромагнитов) электромагнитного подвеса ротора по одной оси. Цифровой регулятор будет стремиться свести отклонение ротора от центрального положения к нулю. При этом следует ожидать высокие показатели быстродействия.
Действительно, структурную схему системы с предлагаемым цифровым регулятором можно представить следующим образом (фиг.5).
Здесь ИЭ1 - импульсный элемент первого рода, который непрерывную функцию времени превращает в решетчатую. ИЭ2 - идеальный импульсный элемент второго рода, преобразующий дискретную последовательность N0[n] в последовательность δ-функций N*[n], т.е. последовательность бесконечных по высоте и бесконечно коротких импульсов. Экстраполятор Э превращает эти импульсы в постоянные в течение такта значения N(t), которые воздействуют на объект управления с передаточной функцией WОУ(p). Под объектом управления понимается совокупность силового преобразователя и процесса перемещения ротора в поле электромагнитов. Введение в структурную схему идеального импульсного элемента второго рода сделано с целью формального изображения экстраполятора в виде динамического звена с передаточной функцией WЭ(p). Цифровой регулятор представлен дискретными передаточными функциями WPC(z), WРП1(z) WРП2(z), WOCC(z) и сравнивающими устройствами, a датчик положения ротора - безинерционным звеном с коэффициентом передачи kДП. На структурной схеме хЗ(t) - сигнала задания (принципиально равный нулю в системе управления электромагнитным подвесом ротора); x(t) - перемещение ротора в поле электромагнитов.
Дискретная передаточная функция интегральной части регулятора для случая, когда выходные разряды регистра 1 сдвинуты относительно разрядов сумматора 8, например, на 4 разряда вправо (что соответствует делению на 16):
 .
.
Дискретная передаточная функция пропорциональной части регулятора для случая, когда выходные разряды регистров 1 и 2 сдвинуты относительно разрядов сумматора 9, например, на 2 разряда влево (что соответствует умножению на 4):
WРП1(z)=4.
Дискретная передаточная функция части регулятора, вычисляющей скорость перемещения ротора, при смещении разрядов регистров 1 и 6 относительно разрядов сумматора 13, например, на 5 разрядов (что соответствует умножению на 32):
Дискретная передаточная функция пропорционально-дифференциальной части регулятора с учетом того, например, что выходные разряды регистров 4 и 5 сдвинуты на 9 разрядов влево относительно разрядов сумматора 11 (соответствует умножению на 512), а выходные разряды сумматора 12 сдвинуты, например, на 2 разряда вправо относительно разрядов мультиплексора 14 с запоминанием (соответствует делению на 4):
 .
.
Передаточная функция объекта управления (см. Макаричев Ю.А., Стариков А.В. Теоретические основы расчета и проектирования радиальных электромагнитных подшипников. - М.: Энергоатомиздат, 2009. - 150 с.)
 ,
,
где m - масса ротора, приходящаяся на один электромагнитный подшипник; kF - коэффициент передачи положительной обратной связи по перемещению; kE - коэффициент передачи обратной связи по э.д.с; kэм - коэффициент передачи электромагнитов по силе; Тэ - электромагнитная постоянная времени обмоток электромагнитов; kШИМ - коэффициент передачи широтно-импульсного модулятора; U - опорное напряжение широтно-импульсной модуляции.
Для электромагнитного подвеса ротора с характеристиками: kE=1461 Вс/м; kЭМ=1306 Н; kF=1315900 Н/м; m=18 кг; R=117,7 Ом; L=4,5 Гн; ТЭ=0,038233 с; U=57,7 В; kШИМ=0,001961; kДП=1000000 дискрет/м, - и периодом импульсов тактовых генераторов 18, 19 и 20 Т=0,0001 с в среде MATLAB SIMULINK рассчитан график переходного процесса (фиг.6). Анализ графика показывает, что время входа в 2% зону составляет 0,0058 с. Эта величина во много раз меньше, чем в системе управления электромагнитным подвесом ротора с цифровым регулятором, взятым за прототип.
Таким образом, предложенный цифровой регулятор позволяет повысить быстродействие системы управления электромагнитным подвесом ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2000 |
|
RU2181903C2 |
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2009 |
|
RU2417390C2 |
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДШИПНИКОМ | 2014 |
|
RU2572386C1 |
| ЦИФРОВОЙ ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР | 2006 |
|
RU2325681C2 |
| Цифровой интегральный регулятор | 2019 |
|
RU2725410C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2014 |
|
RU2566671C1 |
| ЦИФРОВОЙ МОДУЛЯТОР ДЛЯ ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ АСИНХРОННОГО ДВИГАТЕЛЯ | 1995 |
|
RU2111608C1 |
| ЦИФРОВОЙ МОДУЛЯТОР ДЛЯ УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2012 |
|
RU2517423C1 |
| Устройство для автоматического управления процессом обессоливания нефти | 1987 |
|
SU1473795A1 |
| ЦИФРОВОЙ МОДУЛЯТОР ДЛЯ ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2216850C1 |

Изобретение относится к автоматизированным системам регулирования с цифровым управлением и может найти применение в машиностроении при создании роторных механизмов на электромагнитных опорах. Техническим результатом является повышение быстродействия системы управления электромагнитным подвесом ротора за счет того, что цифровой регулятор дополнительно содержит третий генератор прямоугольных импульсов, шестой сумматор и шестой и седьмой регистры. Цифровой регулятор для системы управления электромагнитным подвесом ротора (фиг.1) содержит регистры 1, 2, 3, 4, 5, 6 и 7, сумматоры 8, 9, 10, 11, 12 и 13, мультиплексор 14 с запоминанием, триггер 15 знака, блоки 16 и 17 ограничения, генераторы 18, 19 и 20 прямоугольных импульсов, блок 21 синхронизации, шину 22 входного сигнала, вход 23 стробирования, шину 24 выходного сигнала, шину 25 знака выходного сигнала и связи между ними. 6 ил.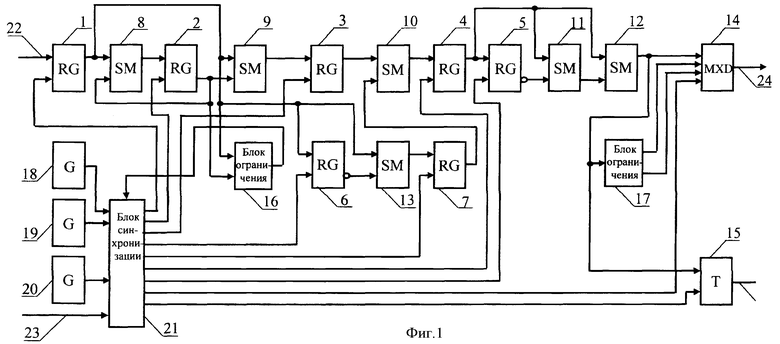
Цифровой регулятор для системы управления электромагнитным подвесом ротора, содержащий первый, второй, третий, четвертый и пятый регистры, первый, второй, третий, четвертый и пятый сумматоры, мультиплексор с запоминанием, триггер знака, первый и второй блоки ограничения, первый и второй генераторы прямоугольных импульсов и блок синхронизации, причем первые входы первого регистра и блока синхронизации являются входом цифрового регулятора, выход первого регистра соединен с первыми входами первого и второго сумматоров и первого блока ограничения, выход первого сумматора соединен с первым входом второго регистра, выход которого соединен с вторыми входами первого и второго сумматоров и первого блока ограничения, выход второго сумматора соединен с первым входом третьего регистра, выход четвертого регистра соединен с первым входом пятого регистра, выход третьего сумматора соединен с первым входом четвертого сумматора, выход которого соединен с первым входом мультиплексора с запоминанием и входом второго блока ограничения, старший разряд выхода четвертого сумматора соединен с первым входом триггера знака, первый и второй выходы второго блока ограничения соединены соответственно с вторым и третьим входами мультиплексора с запоминанием, выходы первого и второго генераторов прямоугольных импульсов соединены соответственно с вторым и третьим входами блока синхронизации, первый, второй, третий, четвертый, пятый, шестой и седьмой выходы которого соединены соответственно с вторыми входами первого, второго, третьего и пятого регистров, четвертым входом мультиплексора с запоминанием, вторым входом триггера знака и первым входом четвертого регистра, выход первого блока ограничения соединен с четвертым входом блока синхронизации, причем выходы мультиплексора с запоминанием и триггера знака являются выходом цифрового регулятора, отличающийся тем, что в него дополнительно введены третий генератор прямоугольных импульсов, шестой сумматор и шестой и седьмой регистры, причем выход третьего регистра соединен с первым входом пятого сумматора, выход которого соединен с вторым входом четвертого регистра, выход первого регистра соединен с первыми входами шестого сумматора и шестого регистра, инверсный выход которого соединен с вторым входом шестого сумматора, выход шестого сумматора соединен с первым входом седьмого регистра, выход которого соединен с вторым входом пятого сумматора, инверсный выход пятого регистра соединен с первым входом третьего сумматора, выход четвертого регистра соединен с вторыми входами третьего и четвертого сумматоров, выход третьего генератора прямоугольных импульсов соединен с пятым входом блока синхронизации, восьмой и девятый выходы которого соединены соответственно с вторыми входами шестого и седьмого регистров.
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2000 |
|
RU2181903C2 |
| Устройство для подбивки железнодорожного балласта | 1934 |
|
SU43661A1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА МИКРОПРОВОЛОКИ ДЛЯ ВЫВОДОВ ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1989 |
|
RU1783674C |
| Устройство для мажоритарного выбора асинхронных сигналов | 1986 |
|
SU1363217A1 |

