Изобретение относится к машиностроению и может быть использовано в роторных механизмах на электромагнитных опорах.
Наиболее близким по технической сущности является механизм с магнитным подвесом ротора (см. а.с. СССР 1569932, опубл. в БИ 21, 1990 г.), в котором каждый канал системы управления (см. Вейнберг Д.М., Верещагин В.П. К определению основных параметров электромагнитных подшипников. - М. : Труды ВНИИЭМ, т. 89, 1989. - С. 12-19.) содержит датчик положения ротора, пропорционально-интегрально-дифферснциальный регулятор, обращенную модель электромагнита, силовой преобразователь и два электромагнита.
Недостатком наиболее близкой системы управления электромагнитным подвесом ротора является сложность ее технической реализации, вызванная необходимостью линеаризации системы путем введения в ее состав обращенной модели электромагнита, которая требует значительных вычислительных операций.
Сущность изобретения заключается в том, что в системе управления электромагнитным подвесом ротора, каждый канал управления которой содержит датчик положения ротора, силовой преобразователь, два электромагнита, причем обмотки электромагнитов подключены к выходу силового преобразователя, каждый канал снабжен интегральным регулятором и форсирующим регулятором второго порядка, причем выход интегрального регулятора соединен с прямым входом форсирующего регулятора второго порядка, выход которого соединен с входом силового преобразователя, а выход датчика положения ротора соединен с инверсными входами обоих регуляторов.
Существенные отличия находят свое выражение в новой совокупности связей между элементами устройства. Указанная совокупность связей позволяет упростить техническую реализацию системы управления электромагнитным подвесом ротора.
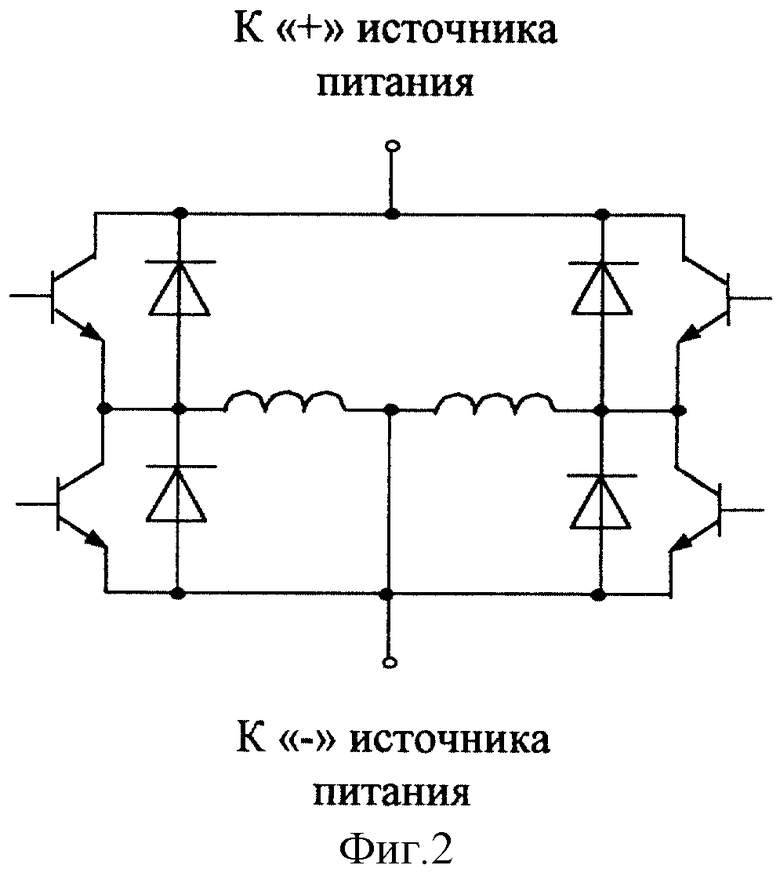
На фиг. 1 представлена функциональная схема каждого канала системы управления электромагнитным подвесом ротора; на фиг.2 изображено подключение обмоток электромагнитов к силовому преобразователю; на фиг. 3 представлена структурная схема одного канала системы управления электромагнитным подвесом ротора; на фиг. 4 приведены графики переходных процессов в системе управления электромагнитным подвесом ротора.
Каждый канал системы управления (фиг.1) содержит датчик 1 положения ротора, интегральный регулятор 2, форсирующий регулятор 3 второго порядка, силовой преобразователь 4, два электромагнита 5 и 6. Датчик 1 положения ротора соединен с инверсными входами интегрального регулятора 2 и форсирующего регулятора 3 второго порядка. Выход интегрального регулятора 2 соединен с прямым входом форсирующего регулятора 3 второго порядка, выход которого соединен с входом силового преобразователя 4. К выходу силового преобразователя 4 подключены обмотки электромагнитов 5 и 6.
В качестве датчика 1 положения ротора может быть применен, например, индуктивный токовихревой датчик. Интегральный регулятор 2 может быть реализован, например, на микросхемах серии КР1533 по а.с. СССР 1649501, опубл. 15.05.91, БИ 18, в котором пропорциональная и дифференциальная составляющая приняты равными нулю. Форсирующий регулятор 3 второго порядка, например, может быть выполнен из двух последовательно включенных устройств по а.с. 1649501, в которых интегральная составляющая принимается равной нулю. Возможна также программная реализация регуляторов 2 и 3 на микропроцессорном контроллере, например С-60, выпускаемом ВАЗом. При этом, например, интегрирование осуществляется как полная сумма, а первая и вторая производная находятся как первая и вторая обратные разности (см. Микропроцессорные системы автоматического управления/Под общ. ред. В. А. Бесекерского. - Л.: Машиностроение, 1988. - С 304-324.). Силовой преобразователь 4, например, представляет собой транзисторный широтно-импульсный преобразователь, состоящий из цифрового широтно-импульсного модулятора, например, выполненного на микросхемах КР1533 по а.с. СССР 1644371, опубл. 23.04.91, БИ 15, и транзисторного моста. Электромагниты 5 и 6 располагаются на статоре роторной машины, например, на одной оси с противоположных сторон от ротора и могут быть выполнены, например, как явно полюсные или с распределенными обмотками. Обмотки электромагнитов подключаются к транзисторному мосту, например, как показано на фиг.2.
Система управления электромагнитным подвесом ротора работает следующим образом. В каждом канале управления датчик положения 1 ротора измеряет отклонение ротора от центрального положения, принятого за базовое. Информация (цифровой код) об измеренном отклонении подается на инверсные входы последовательно включенных интегрального регулятора 2 и форсирующего регулятора 3 второго порядка. В соответствии с передаточными функциями, реализованными регуляторами 2 и 3, с выхода форсирующего регулятора 3 второго порядка на вход силового преобразователя 4 подается цифровой код. Пропорционально этому коду силовой преобразователь 4 регулирует напряжения на обмотках электромагнитов 5 и 6. В результате в обмотках электромагнитов 5 и 6 формируются такие токи, которые создают результирующую силу, возвращающую ротор в центральное (по датчику 1) положение. Причем предложенная система управления электромагнитным подвесом ротора всегда стремится свести к нулю отклонение ротора от центрального положения при любых возмущающих воздействиях, лежащих в рамках силовых характеристик электромагнитов 5 и 6.
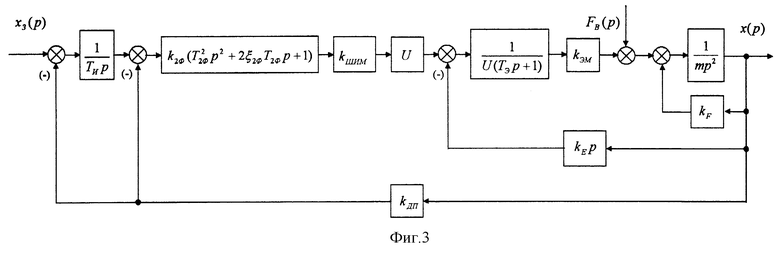
Действительно, процессы, протекающие при работе предложенной системы управления электромагнитным подвесом ротора, можно представить структурной схемой (фиг. 3). Здесь хз(р), Fв(р) и х(р) - изображения сигнала задания, возмущающей силы и перемещения (отклонения от центрального положения) ротора соответственно. Причем для системы управления электромагнитным подвесом ротора принципиально хз(р) =0.
Передаточная функция форсирующего регулятора 3 второго порядка:
R1(p) = k2ф(T
где k2ф, T2ф и ζ2ф - коэффициент передачи, постоянная времени и коэффициент демпфирования соответственно.
Передаточная функция интегрального регулятора 2:
R2(Р)=1/TиР,
где Ти - постоянная времени.
Передаточная функция датчика 1 положения представлена безынерционным звеном с коэффициентом передачи kдп.
Остальные динамические звенья в совокупности представляют собой линеаризованную математическую модель перемещения ротора в поле электромагнитного подшипника под действием управляющего сигнала на входе силового преобразователя 4. Коэффициенты передачи kшим и U характеризуют параметры силового преобразователя 4: коэффициент передачи широтно-импульсного преобразователя и напряжение питания транзисторного моста. Динамическое звено с передаточной функцией
(Тэ - постоянная времени электрической цепи обмоток электромагнитов) связывает приращение соотношения токов в электромагнитах 5 и 6 с приращением напряжения на обмотках, причем заведомо принимается такой закон коммутации транзисторов моста, что увеличение напряжение на одной из обмоток приводит к такому же уменьшению напряжения на другой. Коэффициент передачи kэм связывает силу, действующую со стороны электромагнитов на ротор при его центральном положении, с соотношением токов в электромагнитах. Коэффициент передачи kF характеризует изменение силы, действующей на ротор, при его отклонении от центрального положения. Динамическое звено 1/mp2 в соответствии со вторым законом Ньютона определяет перемещение ротора под действием результирующей силы. Коэффициент передачи kЕ характеризует приращение наводимой в обмотках электромагнитов ЭДС со скоростью перемещения ротора в магнитном поле.
Из структурной схемы следует, что в предложенной системе управления электромагнитным подвесом ротора все возмущения, охваченные обратной связью, полностью компенсируются. Этот факт определяется наличием во внешнем контуре интегрального регулятора 2
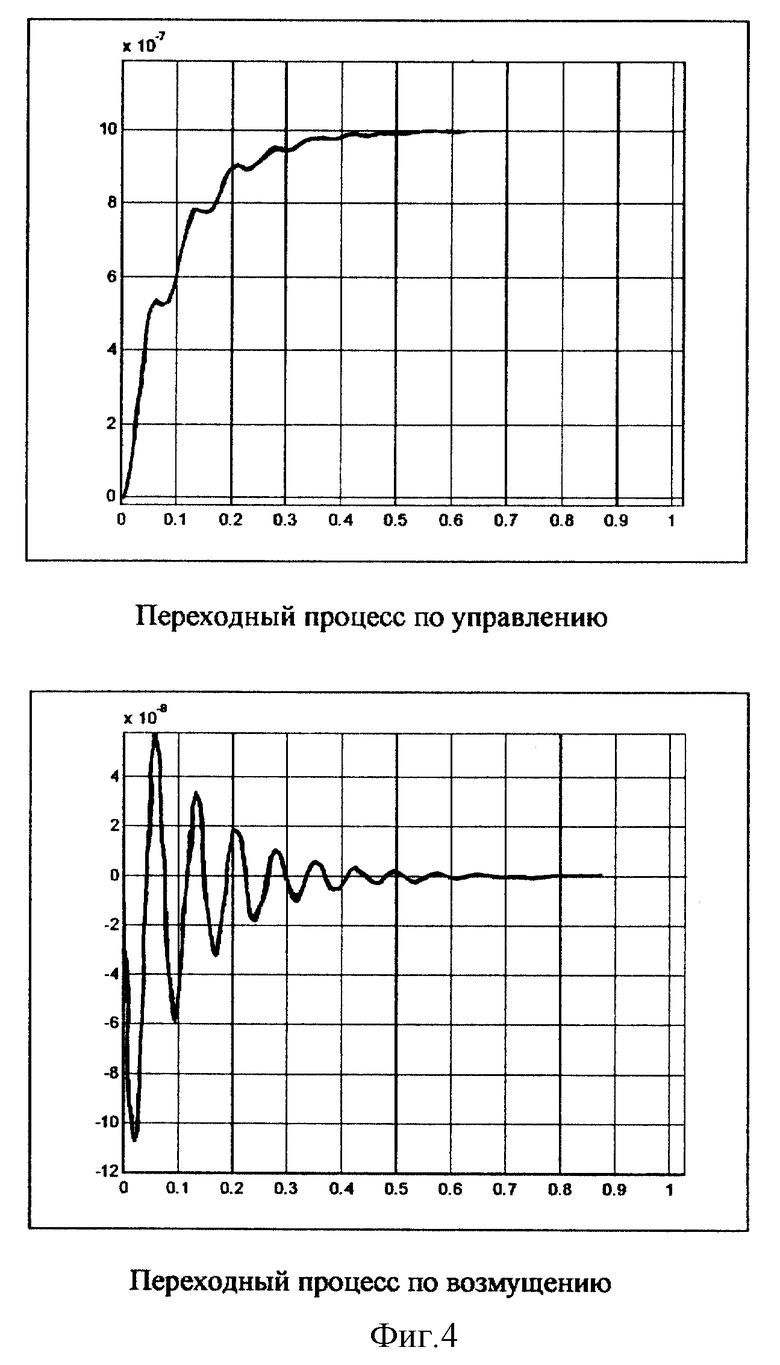
Быстродействие предложенной системы управления электромагнитным подвесом ротора может быть определено из переходных характеристик по отношению к управляющему и возмущающему воздействиям, которые определяются соответствующими передаточными функциями.
Передаточная функция по управлению: ,
,
где k1=k2фkшимkэмkдп.
Передаточная функция системы по отношению к возмущающей силе Fв(р):
Здесь k=k2фkоуkдп; 
Анализ передаточных функций системы управления электромагнитным подвесом ротора показывает, что соответствующий выбор параметров регуляторов 2 и 3 обеспечивает, во-первых, устойчивость системы при широком диапазоне изменения параметров электромагнитного подвеса (коэффициенты kэм, kE, kF и постоянная времени Tэ - переменны), а во-вторых, высокое быстродействие. Действительно, при параметрах электромагнитного подвеса ротора, например турбины: kE=1461 В•с/м; kэм=1306 Н; kF=756000 Н/м; m=18 кг; Тэ =0,038233 с; U= 57,7 В; kдп=1000000 дискрет/м; kшим=0,001961 1/дискрет; Т2ф=0,009124 с; ξ2ф == 0,1194; k2ф= 16; Ти=0,1 с, - графики переходных процессов по управлению и возмущению имеют вид, приведенный на фиг.4.
Таким образом, предложенная система управления электромагнитным подвесом ротора позволяет достичь высоких статических и динамических показателей при одновременном упрощении ее технической реализации. Упрощение технической реализации определяется исключением из состава системы управления обращенной модели электромагнита, которая требует значительных вычислительных операций, и применением простейшего линейного регулятора с соответствующими связями.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2000 |
|
RU2181903C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2008 |
|
RU2395150C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2011 |
|
RU2460909C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2008 |
|
RU2375736C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2007 |
|
RU2345464C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2014 |
|
RU2566671C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2215357C2 |
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2010 |
|
RU2433443C1 |
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2009 |
|
RU2417390C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2006 |
|
RU2358382C2 |
Изобретение относится к области машиностроения, а именно к роторным механизмам на электромагнитных опорах. Технический результат изобретения, заключающийся в упрощении технической реализации системы управления электромагнитным подвесом ротора, достигается путем того, что в системе управления электромагнитным подвесом ротора каждый канал управления снабжен интегральным регулятором и форсирующим регулятором второго порядка, причем выход интегрального регулятора соединен с прямым входом форсирующего регулятора второго порядка, выход которого соединен с входом силового преобразователя, а выход датчика положения ротора соединен с инверсными входами обоих регуляторов. 4 ил.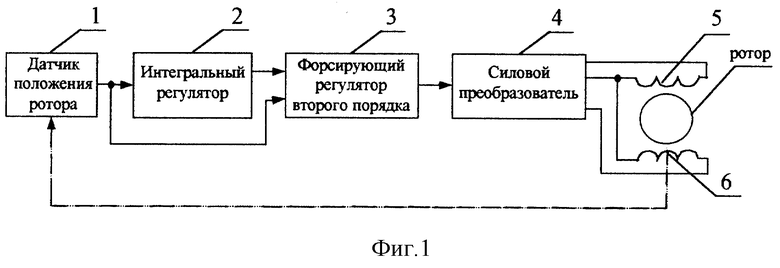
Система управления электромагнитным подвесом ротора, каждый канал управления которой содержит датчик положения ротора, силовой преобразователь, два электромагнита, причем обмотки электромагнитов подключены к силовому преобразователю, отличающаяся тем, что каждый канал снабжен интегральным регулятором и форсирующим регулятором второго порядка, причем выход интегрального регулятора соединен с прямым входом форсирующего регулятора второго порядка, выход которого соединен с входом силового преобразователя, а выход датчика положения ротора соединен с инверсными входами обоих регуляторов.
| Механизм с магнитным подвесом ротора | 1988 |
|
SU1569932A1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2046517C1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| US 5552682 А, 03.09.1996. | |||

