Изобретение относится к машиностроению и может быть использовано в роторных механизмах на электромагнитных опорах.
Наиболее близкой по технической сущности является система управления электромагнитным подвесом ротора (см. патент Российской Федерации № 2181922, опубл. 27.04.2002, бюл. № 12), в котором каждый канал системы управления содержит датчик положения ротора, интегральный регулятор, форсирующий регулятор второго порядка, силовой преобразователь и два электромагнита.
Недостатком наиболее близкой системы управления электромагнитным подвесом ротора является ее низкое быстродействие.
Сущность изобретения заключается в том, что в системе управления электромагнитным подвесом ротора, каждый канал управления которой содержит датчик положения ротора, силовой преобразователь, два электромагнита, причем обмотки электромагнитов подключены к силовому преобразователю, каждый канал снабжен пропорциональным регулятором, дифференцирующим звеном и пропорционально-дифференциальным регулятором, причем выход датчика положения ротора соединен с дифференцирующим звеном и инверсным входом пропорционального регулятора, выход которого соединен с прямым входом пропорционально-дифференциального регулятора, выход дифференцирующего звена соединен с инверсным входом пропорционально-дифференциального регулятора, выход которого соединен с входом силового преобразователя.
Существенные отличия находят свое выражение в новой совокупности связей между элементами устройства. Указанная совокупность связей позволяет повысить быстродействие системы управления электромагнитным подвесом ротора.
На фиг.1 представлена функциональная схема каждого канала системы управления электромагнитным подвесом ротора; на фиг.2 изображено подключение обмоток электромагнитов к силовому преобразователю; на фиг.3 представлена структурная схема одного канала системы управления электромагнитным подвесом ротора; на фиг.4 приведены графики переходных процессов в системе управления электромагнитным подвесом ротора.
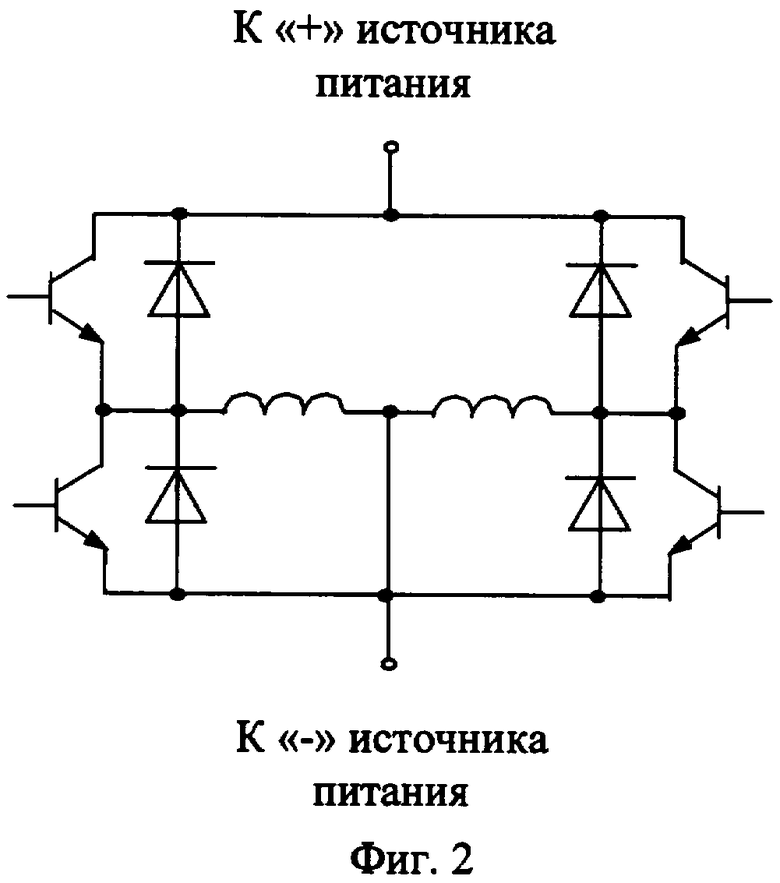
Каждый канал системы управления (фиг.1) содержит датчик 1 положения ротора, пропорциональный регулятор 2, дифференцирующее звено 3, пропорционально-дифференциальный регулятор 4, силовой преобразователь 5, два электромагнита 6 и 7. Датчик 1 положения ротора соединен с инверсным входом пропорционального регулятора 2 и входом дифференцирующего звена 3. Выход пропорционального регулятора 2 соединен с прямым входом пропорционально-дифференциального регулятора 4. Выход дифференцирующего звена 3 соединен с инверсным входом пропорционально-дифференциального регулятора 4, выход которого соединен с входом силового преобразователя 5. К выходу силового преобразователя 5 подключены обмотки электромагнитов 6 и 7.
В качестве датчика 1 положения ротора может быть применен, например, индуктивный токовихревой датчик. Пропорциональный регулятор 2, дифференцирующее звено 3 и пропорционально-дифференциальный регулятор 4 могут быть реализованы, например, на операционных усилителях (см. Михайлов О.П. Автоматизированный электропривод станков и промышленных роботов. - М.: Машиностроение, 1990, с.124), например, К140УД7. Силовой преобразователь 5, например, представляет собой транзисторный широтно-импульсный преобразователь, состоящий из широтно-импульсного модулятора и транзисторного моста (см. Михайлов О.П. Автоматизированный электропривод станков и промышленных роботов. - М.: Машиностроение, 1990, с.119-122). Перечисленные выше блоки системы управления электромагнитным подвесом ротора могут быть также выполнены на элементах цифровой техники, в том числе и программно. Электромагниты 6 и 7 располагаются на статоре роторной машины, например на одной оси с противоположных сторон от ротора, и могут быть выполнены, например, как явнополюсные или с распределенными обмотками. Обмотки электромагнитов подключаются к транзисторному мосту, например, как показано на фиг.2.
Система управления электромагнитным подвесом ротора работает следующим образом. В каждом канале управления датчик 1 положения ротора измеряет отклонение ротора от центрального положения, принятого за базовое. Сигнал об измеренном отклонении подается на инверсный вход пропорционального регулятора 2 и на вход дифференцирующего звена 3.
В соответствии с передаточными функциями, реализованными регуляторами 2 и 4 и дифференцирующим звеном 3, с выхода пропорционально-дифференциального регулятора 4 на вход силового преобразователя 5 подается сигнал, пропорционально которому силовой преобразователь 5 регулирует напряжения на обмотках электромагнитов 6 и 7. В результате в обмотках электромагнитов 6 и 7 формируются такие токи, которые создают результирующую силу, возвращающую ротор в центральное (по датчику 1) положение.
Действительно, процессы, протекающие при работе предложенной системы управления электромагнитным подвесом ротора, можно представить структурной схемой (фиг.3). Здесь kДП - коэффициент передачи датчика 1 положения; kPП - коэффициент передачи пропорционального регулятора 2; kOCC - коэффициент передачи (постоянная времени) дифференцирующего звена; WПД(р) - передаточной функции пропорционально-дифференциального регулятора; а х3(р), FВ(p) и х(р) - изображения сигнала задания, возмущающей силы и перемещения (отклонения от центрального положения) ротора соответственно. Причем для системы управления электромагнитным подвесом ротора принципиально х3(р)=0.
Остальные динамические звенья в совокупности представляют собой линеаризованную математическую модель перемещения ротора в поле электромагнитного подшипника под действием управляющего сигнала на входе силового преобразователя 5. Коэффициенты передачи kШИМ и U характеризуют параметры силового преобразователя 5: коэффициент передачи широтно-импульсного преобразователя и напряжение питания транзисторного моста. Динамическое звено с передаточной функцией

(ТЭ - постоянная времени электрической цепи обмоток электромагнитов) связывает приращение соотношения токов в электромагнитах 6 и 7 с приращением напряжения на обмотках, причем заведомо принимается такой закон коммутации транзисторов моста, что увеличение напряжения на одной из обмоток приводит к такому же уменьшению напряжения на другой. Коэффициент передачи kЭМ связывает силу, действующую со стороны электромагнитов на ротор при его центральном положении, с соотношением токов в электромагнитах. Коэффициент передачи kF характеризует изменение силы, действующей на ротор, при его отклонении от центрального положения. Динамическое звено  в соответствии со вторым законом Ньютона определяет перемещение ротора под действием результирующей силы. Коэффициент передачи kЕ характеризует приращение наводимой в обмотках электромагнитов ЭДС со скоростью перемещения ротора в магнитном поле.
в соответствии со вторым законом Ньютона определяет перемещение ротора под действием результирующей силы. Коэффициент передачи kЕ характеризует приращение наводимой в обмотках электромагнитов ЭДС со скоростью перемещения ротора в магнитном поле.
Величина постоянной времени пропорционально-дифференциального регулятора 4
WПД(р)=kПЛ(ТПДр+1)
определяется, например, соотношением
ТПД=2ТЭ,
а коэффициент передачи kПД этого регулятора может варьироваться в широких пределах.
Величина коэффициента передачи kРП пропорционального регулятора 2 в соответствии с условием устойчивости также может выбираться из широкого ряда значений.
На фиг.4 приведены графики переходных процессов по управлению и возмущению при следующих параметрах электромагнитного подвеса ротора, например, турбины:
kЕ=1461 В·с/м; kЭМ=1306 Н; kF=1315900 Н/м; m=18 кг; ТЭ=0,038233 с; U=57,7 В, - и при выборе параметров регуляторов ТПД=0,076466 с, kПД=10, kРП=25. Анализ графиков показывает, что в системе управления электромагнитным подвесом ротора наблюдается высочайшее быстродействие. Время переходного процесса по управляющему воздействию составляет tПП=0,00108 с. Динамический провал ротора при ударном приложении силы в 1 Н составит всего Δxmax=0,00617 мкм. Достичь подобных результатов в системе управления, взятой за прототип, невозможно.
Таким образом, предложенная система управления позволяет повысить быстродействие электромагнитного подвеса ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2008 |
|
RU2395150C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2011 |
|
RU2460909C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2014 |
|
RU2566671C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2007 |
|
RU2345464C1 |
| Система управления электромагнитным подвесом ротора | 2024 |
|
RU2831082C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 1999 |
|
RU2181922C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2015 |
|
RU2589718C1 |
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2009 |
|
RU2417390C2 |
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2010 |
|
RU2433443C1 |
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2000 |
|
RU2181903C2 |


Изобретение относится к машиностроению и может быть использовано в роторных механизмах на электромагнитных опорах. Техническим результатом является повышение быстродействия электромагнитного подвеса ротора. Каждый канал системы управления содержит датчик (1) положения ротора, пропорциональный регулятор (2), дифференцирующее звено (3), пропорционально-дифференциальный регулятор (4), силовой преобразователь (5), два электромагнита (6) и (7). 4 ил.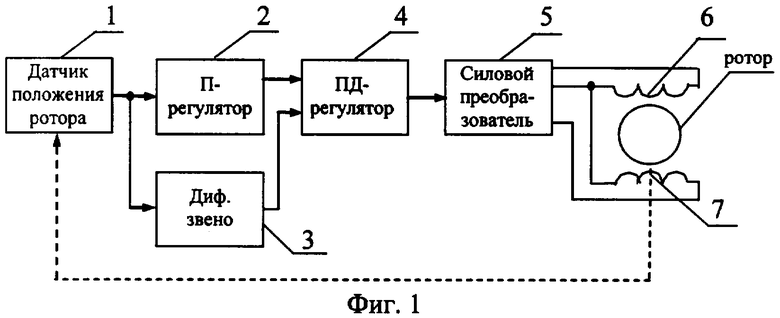
Система управления электромагнитным подвесом ротора, каждый канал управления которой содержит датчик положения ротора, силовой преобразователь, два электромагнита, причем обмотки электромагнитов подключены к силовому преобразователю, отличающаяся тем, что каждый канал снабжен пропорциональным регулятором, дифференцирующим звеном и пропорционально-дифференциальным регулятором, причем выход датчика положения ротора соединен с дифференцирующим звеном и инверсным входом пропорционального регулятора, выход которого соединен с прямым входом пропорционально-дифференциального регулятора, выход дифференцирующего звена соединен с инверсным входом пропорционально-дифференциального регулятора, выход которого соединен с входом силового преобразователя.
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 1999 |
|
RU2181922C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2215357C2 |
| Механизм с магнитным подвесом ротора | 1988 |
|
SU1569932A1 |
| US 5552682 A, 03.09.1996 | |||
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |

