Изобретение относится к способам селекции протяженных целей в облаке дипольных отражателей и может найти применение в поляриметрических радиолокаторах.
Известны способы и устройства селекции целей, предназначенные для использования в поляриметрических радиолокаторах - Dual quadrature polarization radar system, США, патент №4005425, дата публикации: 14.11.75; Способ измерения параметров поляризации векторного сигнала. Патент РФ №2168744, дата публикации: 2001.06.10, Устройство для измерения поляризационной матрицы рассеяния, СССР, А.С. №156137, 1981 г.; Устройство для обнаружения целей в облаках диполей, СССР, А.С. №326176, №329666, 1991 г.; Способ измерения параметров поляризации векторного сигнала, Патент РФ №2168744, дата публикации: 2001.06.10.
В качестве прототипа изобретения может быть рассмотрен способ, предложенный С.П.Лукьяновым в статье «Эффективность поляризационных радиолокаторов в задаче обнаружения стабильных целей на фоне пассивных помех», «Журнал радиоэлектроники» №5, 2000. Предлагается проведение измерений параметров матрицы рассеяния (МР) или ее инвариантов для каждой цели и вычисление на этой основе поляризационных параметров: инвариантного - степень анизотропии (μ) и динамического - угол ориентации собственного базиса цели относительно измерительного (α), по величинам которых предлагается выработка решения о протяженности объекта локации и его ориентации в пространстве.
Общим недостатком аналогов и прототипа изобретения является необходимость обнаружения и измерения параметров поляризационной матрицы рассеяния для всех целей, находящихся в зоне действия РЛС. Для относительно малого количества целей эти решения позволяют достичь требуемого результата в рамках существующих и перспективных вычислительных средств. При использовании достаточно большого количества дипольных отражателей (до 5...10 кассет по 106...108 диполей в каждой в зависимости от диапазона работы РЛС) использование предлагаемых технических решений является нереальным по причине недостаточной производительности вычислительных средств.
Сущность предлагаемого способа обнаружения любого протяженного тела на фоне совокупности элементарных отражателей заключается в выделении детерминированной эллиптической составляющей отраженного сигнала на фоне суперпозиции линейно поляризованных сигналов со случайным наклоном вектора поляризации.
Физической основой предлагаемого способа обнаружения протяженного объекта является то, что при облучении элементарного (дипольного) отражателя сигналом круговой поляризации он возвращает линейно поляризованный сигнал с наклоном поляризационного вектора, соответствующим положению этого отражателя в пространстве. Облучение любого протяженного тела сигналом круговой поляризации возвращает эллиптически поляризованный сигнал с наклоном главной оси поляризационного эллипса, соответствующим положению этого тела в пространстве.
Положительный эффект, заключающийся в селекции протяженной цели в облаке диполей без проведения процессов обнаружения и распознавания всех целей в облаке сложной цели, достигается тем, что в качестве зондирующего сигнала РЛС используется сигнал круговой поляризации, приемная система обеспечивает прием линейных ортогональных составляющих сигналов, отраженных от целей, а в качестве параметра, по величине которого путем сравнения с выбранным критерием вырабатывается решение об обнаружении протяженного объекта, используется фазовый сдвиг между принятыми ортогональными составляющими сигналов, отраженных от целей.
Пример осуществления изобретения приведен на чертеже.
Сигналы от целей, облучаемых зондирующим сигналом круговой поляризации, принимаются с помощью антенны 1, соединенной с СВЧ трактом. Этот тракт соединяется переходной секцией разделения принимаемого сигнала на две ортогональных поляризации 2 с СВЧ трактами. К каждому из этих трактов подключена смесительная камера 3. Гетеродин 4 использует один на два канала с тем, чтобы сохранить при преобразовании неизменность разности фаз между ортогональными компонентами. Сигналы промежуточной частоты с выхода соответствующих смесителей 3 подаются на усилители промежуточной частоты 5 с одинаковыми частотными и фазовыми характеристиками, а затем после детектирования амплитудным 6 детектором поступают на устройства регистрации. Для регистрации относительной фазы используется третий канал, представляющий собой два фазовых детектора 7, на которые в качестве опорного напряжения подаются сигналы промежуточной частоты одного канала, а в качестве сигнала - напряжение промежуточной частоты второго. При этом опорное напряжение на один из фазовых детекторов подается через фазосдвигаюшую цепочку 8 со сдвигом по фазе на 90°. В результате на выходе одного фазового детектора будет постоянное напряжение, пропорциональное синусу разности фаз Фху, а на выходе второго - косинусу этой разности.
Подобное построение приемного устройства позволяет для каждого элемента разрешения по дальности получить матрицу на 4 измерения: амплитуды сигналов, принятых ортогональными антеннами Ex(t), Ey(t) и относительной фазы (разности фаз) сигналов, принимаемых ортогональными компонентами, в форме синуса и косинуса разности фаз Sin(Фxy) и Cos(Фxy), которые при обработке сигнала накапливаются в дальностных фильтрах и сравниваются с энергетическим порогом обнаружения. В дальнейшей обработке они могут быть использованы для вычисления собственно разности фаз Фху с помощью специального счетно-решающего устройства 9. Накопление сигналов от целей и их сравнение с порогом обнаружения осуществляется в интегрирующих фильтрах матрицы каналов по дальности 10.
Алгоритмически этот способ обнаружения предполагает
1. Хронизацию сигналов, принятых ортогональными антеннами, по каналам дальности в каждом зондировании.
2. В каждом дальностном канале за счет амплитудного и фазового детектирования по схеме, приведенной на чертеже, получают сигналы, соответствующие амплитудам и синус-косинусным составляющим разности фаз.
3. В каждом амплитудном и фазовом канале осуществляется накопление сигнала в дальностной матрице фильтров.
4. Накопленный сигнал в каждом фильтре по дальности сравнивается с порогом. При этом в амплитудных каналах обеспечивается обнаружение всех целей, а в фазовом - только протяженных целей, обеспечивающих эллиптическую поляризацию отраженной волны.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЛЕКЦИИ ЦЕЛЕЙ | 2004 |
|
RU2284551C2 |
| СПОСОБ СЕЛЕКЦИИ ПРОТЯЖЕННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2342677C1 |
| Способ дальнего обнаружения и распознавания малозаметных воздушных целей | 2022 |
|
RU2802089C1 |
| СПОСОБ ЛОКАЦИИ ЦЕЛЕЙ | 2004 |
|
RU2271020C2 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ПОЛЯРИЗАЦИОННОГО ПОРТРЕТА ЗЕМНОЙ ИЛИ МОРСКОЙ ПОВЕРХНОСТИ В ДВУХЧАСТОТНОЙ ЦИФРОВОЙ РСА | 1999 |
|
RU2166774C2 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2574167C1 |
| СПОСОБ ПОЛЯРИМЕТРИЧЕСКОЙ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2020 |
|
RU2769970C1 |
| СПОСОБ СЕЛЕКЦИИ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ НА ФОНЕ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2018 |
|
RU2693048C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ | 1998 |
|
RU2127437C1 |
| ГЕНЕРАТОР, ИМИТИРУЮЩИЙ ПОМЕХОВЫЕ СИГНАЛЫ ОТ ДИПОЛЬНЫХ ОТРАЖАТЕЛЕЙ | 2006 |
|
RU2310883C1 |
Изобретение относится к радиолокационным средствам полного поляризационного приема. На основе измерений параметров матрицы рассеяния или ее инвариантов для каждой цели и вычисления на этой основе поляризационных параметров предлагается выработать решение о протяженности объекта локации. Достигаемым техническим результатом изобретения является возможность выделения протяженного объекта (объектов) в облаке диполей, без проведения процессов обнаружения и распознавания всех целей в облаке сложной цели, за счет того, что в качестве зондирующего сигнала РЛС используется сигнал круговой поляризации, приемная система обеспечивает прием линейных ортогональных составляющих отраженных от целей сигналов, а в качестве параметра, по величине которого путем сравнения с выбранным критерием вырабатывается решение об обнаружении протяженного объекта, используется накопленный в дальностных каналах дальности фазовый сдвиг между принятыми ортогональными составляющими сигналов, отраженных от целей. 1 ил.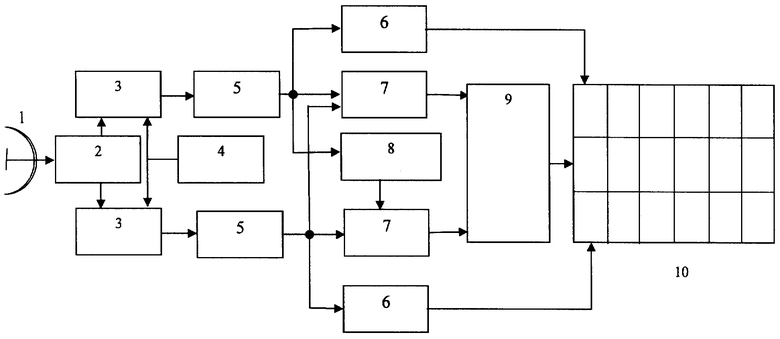
Способ селекции целей для обнаружения протяженных объектов в облаке дипольных отражателей в поляриметрических радиолокаторах, основанный на облучении целей сигналом круговой поляризации и приеме линейных ортогональных составляющих сигналов, отраженных от целей, отличающийся тем, что в качестве параметра, по величине которого путем сравнения с порогом вырабатывается решение об обнаружении протяженного объекта в облаке дипольных отражателей, используется накопленный в каналах дальности поляриметрического радиолокатора в каждом зондировании фазовый сдвиг между принятыми линейными ортогональными составляющими сигналов, отраженных от целей.
| ЛУКЬЯНОВ С.П | |||
| Эффективность поляризационных радиолокаторов в задаче обнаружения стабильных целей на фоне пассивных помех | |||
| «Журнал радиоэлектроники», 2000, №5 | |||
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2192652C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕЯНИЯ ОБЪЕКТА | 2001 |
|
RU2183022C1 |
| US 2002135529 А1, 26.09.2002 | |||
| US 5334981 А, 02.08.1994 | |||
| Арретирующее приспособление к магнитоэлектрическому измерительному прибору | 1934 |
|
SU42203A1 |

