Изобретение относится к области селекции протяженных целей в облаке дипольных отражателей и может найти применение в поляриметрических радиолокаторах.
Наиболее близким к изобретению является способ селекции целей для обнаружения протяженных объектов в облаке дипольных отражателей в поляриметрических радиолокаторах, основанный на облучении целей сигналом круговой поляризации и приеме линейных ортогональных составляющих сигналов, отраженных от целей, выборе в качестве параметра, по величине которого путем сравнения с порогом вырабатывается решение об обнаружении протяженного объекта в облаке дипольных отражателей, накопленного в каналах дальности поляриметрического радиолокатора в каждом зондировании фазового сдвига между принятыми линейными ортогональными составляющими сигналов, отраженных от целей /1/.
Наиболее близким к изобретению является устройство селекции целей, содержащее антенну, сверхвысокочастотный (СВЧ) тракт, первую и вторую смесительные камеры, гетеродин, первый и второй усилители промежуточной частоты, первый и второй амплитудные детекторы, первый и второй фазовые детекторы, фазосдвигающую цепочку, счетно-решающее устройство, матрицу каналов по дальности, причем выход антенны, соединен с входом СВЧ-тракта, первый и второй выходы которого соединены с первыми входами первого и второго смесителей, вторые входы которых соединены с выходом гетеродина, выходы первого и второго смесителей через первый и второй усилители промежуточной частоты соединены соответственно с входом первого амплитудного детектора и одновременно с первым входом первого фазового детектора и входом фазосдвигающей цепи, с входом второго амплитудного детектора и одновременно с первым входом второго и вторым входом первого фазовых детекторов, выход фазосдвигающей цепи соединен со вторым входом второго фазового детектора, выходы первого и второго фазовых детекторов соединены с первым и вторым входом счетно-решающего устройства, выход которого соединен со вторым входом матрицы каналов по дальности, первый и третий входы которой соединены соответственно с выходами первого и второго амплитудных детекторов /1/.
Недостатком данных способа и устройства является отсутствие возможности определения угловых положений протяженных целей в облаке дипольных отражателей.
Технической задачей изобретения является расширение функциональных возможностей за счет определения угловых положений протяженных целей в облаке дипольных отражателей.
Решение технической задачи достигается тем, что в способе селекции протяженных целей для обнаружения протяженных объектов в облаке дипольных отражателей в поляриметрических радиолокаторах, основанном на облучении целей сигналом круговой поляризации и приеме линейных ортогональных составляющих сигналов, отраженных от целей, выборе в качестве параметра, по величине которого путем сравнения с порогом вырабатывается решение об обнаружении протяженного объекта в облаке дипольных отражателей, накопленного в каналах дальности поляриметрического радиолокатора в каждом зондировании фазового сдвига между принятыми линейными ортогональными составляющими сигналов, отраженных от целей, дополнительно осуществляют сканирование узконаправленной антенной в заданной зоне обзора, осуществляют анализ полученных значений сигналов в каждом фиксированном угловом положении антенны, осуществляют определение угловых положений местонахождений протяженных целей в моменты появления фазового сдвига между принятыми линейными ортогональными составляющими сигналов, отраженных от целей.
Решение технической задачи достигается тем, что в устройстве селекции протяженных целей, содержащем антенну, сверхвысокочастотный (СВЧ) тракт, первую и вторую смесительные камеры, гетеродин, первый и второй усилители промежуточной частоты, первый и второй амплитудные детекторы, первый и второй фазовые детекторы, фазосдвигающую цепочку, счетно-решающее устройство, матрицу каналов по дальности, причем выход антенны, соединен с входом СВЧ-тракта, первый и второй выходы которого соединены с первыми входами первого и второго смесителей, вторые входы которых соединены с выходом гетеродина, выходы первого и второго смесителей через первый и второй усилители промежуточной частоты соединены соответственно с входом первого амплитудного детектора и одновременно с первым входом первого фазового детектора и входом фазосдвигающей цепи, с входом второго амплитудного детектора и одновременно входом второго и вторым входом первого фазовых детекторов, выходы первого и второго фазовых детекторов соединены с первым и вторым входом счетно-решающего устройства, выход которого соединен со вторым входом матрицы каналов по дальности, первый и третий входы которой соединены соответственно с выходами первого и второго амплитудных детекторов, дополнительно введен блок управления антенной, вход которого соединен с выходом матрицы каналов по дальности, первый выход - со входом антенны, а вторая группа выходов является выходами угловых положений протяженных целей.
Кроме того, блок управления антенной состоит из антенного коммутатора, сдвигового регистра, генератора импульсов, n-элементов И, причем выход генератора импульса соединен со входом сдвигового регистра, n-выходов которого соединены с n-входами антенного коммутатора и одновременно с первыми входами n-элементов И, вторые входы которых соединены с входом блока управления антенной, первым и вторыми выходами которого являются соответственно выход антенного коммутатора и выходы n-элементов И.
Новыми отличительными признаками способа являются следующие.
1. Осуществляют сканирования узконаправленной антенной в заданной зоне обзора.
2. Осуществляют анализ полученных значений сигналов в каждом фиксированном угловом положении антенны.
3. Осуществляют определение угловых положений местонахождений протяженных целей в моменты появления фазового сдвига между принятыми линейными ортогональными составляющими сигналов, отраженных от целей.
Новыми отличительными элементами по устройству являются блок управления антенной и связи между известными и новыми элементами.
Сущность способа обнаружения любого протяженного тела на фоне совокупности элементарных отражателей заключается в выделении детерминированной эллиптической составляющей отраженного сигнала на фоне суперпозиции линейно поляризованных сигналов со случайным наклоном вектора поляризации.
Физической основой предлагаемого способа обнаружения протяженного объекта является то, что при облучении элементарного (дипольного) отражателя сигналом круговой поляризации он возвращает линейно поляризованный сигнал с наклоном поляризационного вектора, соответствующим положению этого отражателя в пространстве. Облучение любого протяженного тела сигналом круговой поляризации возвращает эллиптически поляризованный сигнал с наклоном главной оси поляризационного эллипса, соответствующим положению этого тела в пространстве.
Положительный эффект, заключающийся в селекции протяженной цели в облаке диполей без проведения процессов обнаружения и распознавания всех целей в облаке сложной цели, достигается тем, что в качестве зондирующего сигнала РЛС используется сигнал круговой поляризации, приемная система обеспечивает прием линейных ортогональных составляющих сигналов, отраженных от целей, а в качестве параметра, по величине которого путем сравнения с выбранным критерием вырабатывается решение об обнаружении протяженного объекта, используется фазовый сдвиг между принятыми ортогональными составляющими сигналов, отраженных от целей.
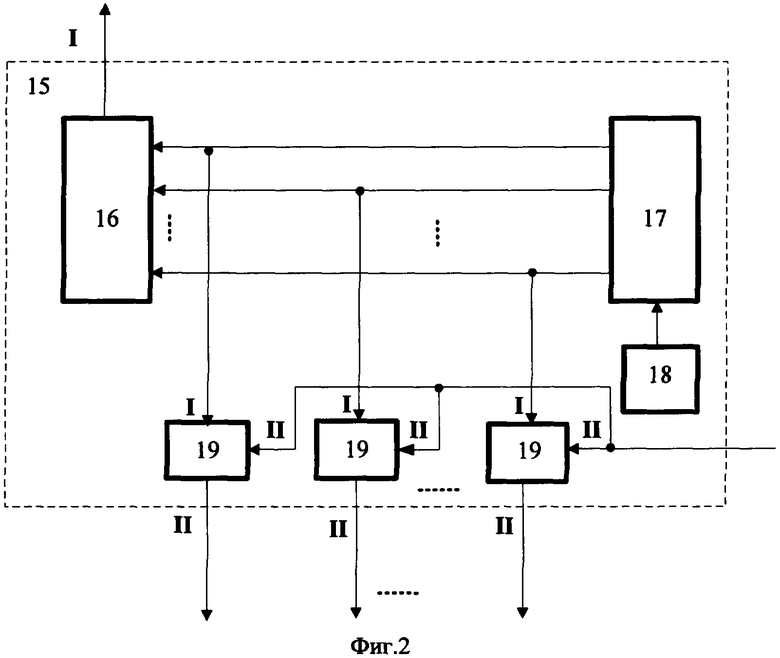
На фиг.1 приведена структурная схема устройства селекции протяженных целей, на фиг.2 - структурная схема блока управления антенной.
Устройство селекции протяженных целей содержит антенну 1, сверхвысокочастотный (СВЧ) тракт 2, первую 3 и вторую 4 смесительные камеры, гетеродин 5, первый 6 и второй 7 усилители промежуточной частоты, первый 8 и второй 9 амплитудные детекторы, первый 10 и второй 11 фазовые детекторы, фазосдвигающую цепочку 12, счетно-решающее устройство 13, матрицу каналов по дальности 14, блок управления антенной 15, причем выход антенны 1 соединен с входом СВЧ-тракта 2, первый и второй выходы которого соединены с первыми входами первого 3 и второго 4 смесителей, вторые входы которых соединены с выходом гетеродина 5, выходы первого 3 и второго 4 смесителей через первый 6 и второй 7 усилители промежуточной частоты соединены соответственно с входом первого 8 амплитудного детектора и одновременно с первым входом первого 10 фазового детектора и входом фазосдвигающей цепи 12, с входом второго 9 амплитудного детектора и одновременно первым входом второго 11 и вторым входом первого 10 фазовых детекторов, выход фазосдвигающей цепи 12 соединен со вторым входом второго фазового детектора, выходы первого 10 и второго 11 фазовых детекторов соединены с первым и вторым входами счетно-решающего устройства 13, выход которого соединен со вторым входом матрицы 14 каналов по дальности, первый и третий входы которой соединены соответственно с выходами первого 8 и второго 9 амплитудных детекторов, выход матрицы 14 каналов по дальности соединен с входом блока 15 управления антенной, первый выход которого соединен с входом антенны 1, а второй выход является выходом угловых положений протяженных целей, блок 15 управления антенной состоит из антенного коммутатора 16, сдвигового регистра 17, генератора 18 импульсов, n-элементов И 19, причем выход генератора 18 импульса соединен со входом сдвигового регистра 17, n-выходов которого соединены с n-входами антенного коммутатора 16 и одновременно с первыми входами n-элементов И 19, вторые входы которых соединены с входом блока 15 управления антенной, первым и вторыми выходами которого являются соответственно выход антенного коммутатора 16 и выходы n-элементов И 19.
Способ осуществляется следующим образом.
Сигналы от целей, облучаемых зондирующим сигналом круговой поляризации, принимаются с помощью антенны 1, соединенной с СВЧ-трактом 2. Антенна 1 осуществляет сканирование пространства в заданной зоне обзора. СВЧ-тракт 2 соединяется переходной секцией разделения принимаемого сигнала на две ортогональных поляризации. К каждому из этих трактов подключена смесительная камера 3, 4, гетеродин 5 использует один на два канала с тем, чтобы сохранить при преобразовании неизменность разности фаз между ортогональными компонентами. Сигналы промежуточной частоты с выхода соответствующих смесителей 3, 4 подаются на усилители промежуточной частоты 6, 7 с одинаковыми частотными и фазовыми характеристиками, а затем после детектирования амплитудными 8, 9 детекторами поступают на устройства регистрации. Для регистрации относительной фазы используется третий канал, представляющий собой два фазовых детектора 10, 11, на которые в качестве опорного напряжения подаются сигналы промежуточной частоты одного канала, а в качестве сигнала - напряжение промежуточной частоты второго. При этом опорное напряжение на один из фазовых детекторов подается через фазосдвигающую цепочку 12 со сдвигом по фазе на 90°. В результате на выходе одного фазового детектора будет постоянное напряжение, пропорциональное синусу разности фаз Фху, а на выходе второго - косинусу этой разности.
Приемное устройство позволяет для каждого элемента разрешения по дальности получить матрицу на четыре измерения: амплитуды сигналов, принятых ортогональными антеннами Ex(t), Ey(t) и относительной фазы (разности фаз) сигналов, принимаемых ортогональными компонентами, в форме синуса и косинуса разности фаз Sin(Фху) и Cos(Фху), которые при обработке сигнала накапливаются в матрице 14 дальностных фильтрах и сравниваются с энергетическим порогом обнаружения. В дальнейшей обработке они могут быть использованы для вычисления собственно разности фаз Фху с помощью специального счетно-решающего устройства 13. Накопление сигналов от целей и их сравнение с порогом обнаружения осуществляется в интегрирующих фильтрах матрицы каналов по дальности 14.
С выхода матрицы 14 каналов по дальности сигналы поступают на вход блока 15 управления антенной и соответственно на вторые входы n-элементов И 19. На первые входы которых и одновременно на n-входы антенного коммутатора поступают попеременно сигналы с n-выходов сдвигового регистра 17, на вход которого поступают импульсы с генератора сигналов 18. Сдвиговой регистр 17 обеспечивает сканирование антенной в зоне обзора за счет управления антенным коммутатором 16. В момент совпадения сигналов на входах одного из элементов И 19 на выходе элемента И 19 формируется сигнал, определяющий угловое положение одного из протяженных объектов, находящегося в поле обзора.
Алгоритмически этот способ обнаружения предполагает:
1. Облучение целей сигналом круговой поляризации.
2. Осуществление сканирования узконаправленной приемной антенной в заданной зоне обзора.
3. Осуществление приема линейных ортогональных составляющих сигналов, отраженных от целей в каждом фиксированном угловом положении антенны.
4. Хронизацию сигналов, принятых ортогональными антеннами, по каналам дальности в каждом зондировании.
5. Определение амплитуд и синус-косинусных составляющих разности фаз в каждом дальностном канале за счет амплитудного и фазового детектирования по схеме, приведенной на чертеже.
6. Осуществление накопления сигнала в каждом амплитудном и фазовом канале в дальностной матрице фильтров.
7. Сравнение с порогом накопленного сигнала в каждом фильтре по дальности, при этом в амплитудных каналах обеспечивается обнаружение всех целей, а в фазовом - только протяженных целей, обеспечивающих эллиптическую поляризацию отраженной волны.
8. Осуществление определения угловых положений местонахождений протяженных целей путем определения положения антенны в момент выявления фазового сдвига между принятыми линейными ортогональными составляющими сигналов, отраженных от целей.
Источники информации
1. Патент на изобретение РФ №2291465, кл. G01S 13/534 от 10.01. 2007 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ дальнего обнаружения и распознавания малозаметных воздушных целей | 2022 |
|
RU2802089C1 |
| СПОСОБ СЕЛЕКЦИИ ЦЕЛЕЙ | 2004 |
|
RU2284551C2 |
| СПОСОБ СЕЛЕКЦИИ ЦЕЛЕЙ | 2004 |
|
RU2291465C2 |
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2449309C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ГРУППОВОЙ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484498C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2483320C1 |
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2492501C1 |
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2492503C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2332634C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2351889C2 |
Изобретение относится к радиолокационным средствам полного поляризационного приема. На основе измерений параметров матрицы рассеяния или ее инвариантов для каждой цели и вычисления на этой основе поляризационных параметров предлагается выработать решение о протяженности объекта локации. Достигаемым техническим результатом изобретения является расширение функциональных возможностей. Предложенные способ и устройство позволяют осуществить не только обнаружение протяженного объекта в облаке дипольных отражателей в поляриметрических радиолокаторах, но и определение угловых положений местонахождений протяженных целей в облаке дипольных отражателей в моменты появления фазового сдвига между принятыми линейными ортогональными составляющими сигналов, отраженных от целей. 2 н.п. ф-лы, 2 ил.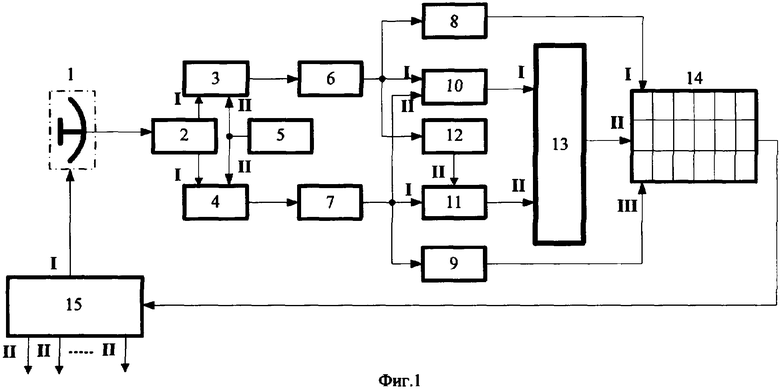
| СПОСОБ СЕЛЕКЦИИ ЦЕЛЕЙ | 2004 |
|
RU2291465C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОЛЯРИЗАЦИИ ВЕКТОРНОГО СИГНАЛА | 1999 |
|
RU2168744C2 |
| RU 2004101237 A, 20.06.2005 | |||
| СПОСОБ СЕЛЕКЦИИ ЦЕЛЕЙ | 2004 |
|
RU2284551C2 |
| US 2002135529 A1, 26.09.2002 | |||
| WO 2006036189 A2, 06.04.2006 | |||
| US 2004046689 A1, 11.03.2004. | |||

