Изобретение относится к радиолокации и может найти применение в радиолокаторах, которые обеспечивают получение полной поляризационной матрицы рассеивания.
Современные методы селекции радиолокационных целей основаны на анализе статистических характеристик сигналов, рассеянных целью. При этом одной из информационных характеристик является поляризационная матрица рассеивания (ПМР) и анализ ее статистических характеристик. В большинстве исследований, выполненных как в России, так и за рубежом анализируются характеристики ПМР для одного элемента разрешения
Известен способ селекции радиолокационных целей при управлении движением воздушного и морского транспорта на фоне мешающих отражений и помех (см. патент РФ №2256194 от 10.07.2003 г., МПК G01S 13/04). Способ селекции заключается в том, что радиолокационная цель с известными поляризационными параметрами облучается сигналами линейной поляризации с вращающейся плоскостью поляризации. В отраженном от цели сигнале выделяют вторую и четвертую относительно частоты вращения плоскости поляризации исходного сигнала гармоники, параметры которых (амплитуды и фазы) и являются поляризационными параметрами цели. Решение о наличии или отсутствии селектируемой цели принимается на основе решающего правила, представляющего собой линейную комбинацию поляризационных параметров с коэффициентами, определяемыми статистическими характеристиками поляризационных параметров при наличии и при отсутствии цели. Порог принятия решения решающего правила определяется критерием максимального правдоподобия и принимается равным единице. Достигаемый технический результат - повышение эффективности селекции цели с известными поляризационными параметрами, т.е. при заданной вероятности ложной тревоги снижение до минимума вероятности принятия решения об отсутствии цели при ее наличии (вероятности пропуска цели).
Известен способ обнаружения и селекции радиолокационных сигналов по поляризационному признаку (см. патент РФ №2476903 от 09.03.2011 МПК: G01S 13/04)
Сущность изобретения заключается в приеме двух ортогональных по поляризации компонент сигнала, преобразование аналоговых сигналов в цифровую форму, запоминание их в устройствах памяти, интерполирование цифровых сигналов, запоминание интерполированных цифровых сигналов, последующие определения отношения амплитуд и разности фаз ортогональных компонент селектируемого сигнала, вычисление совокупного поляризационного параметра принимаемого сигнала - угла эллиптичности и принятие решения о наличии или отсутствии селектируемого сигнала в соответствии с критерием Неймана-Пирсона.
Недостатком указанного способа является то, что обнаружение радиолокационных целей производится по энергетическому совокупному параметру (при этом не учитываются априорные вероятности о поляризации отраженного сигнала), что не позволяет произвести согласованное по поляризации обнаружение и селекцию отраженных сигналов.
Технической задачей для реализации селекции радиолокационных целей на фоне подстилающей поверхности является разработка алгоритма, позволяющего разнести составляющие поляризационных характеристик целей и фона на основе совместного анализа матриц рассеяния по стробам дальности (элементам разрешения ΔR) в заданном угловом направлении.
В настоящем изобретении рассматривается совокупность последовательно расположенных элементов разрешения и, соответственно ПМР, принадлежащие каждому из них. Реализация такого алгоритма селекции возможна с помощью радиолокатора обладающего высоким разрешением с помощью широкополосного сигнала, при этом разрешение по дальности - не хуже 8 метров.
Для решения поставленной задачи в способе селекции радиолокационных целей на фоне подстилающей поверхности, заключающемся в облучении цели двумя линейно ортогонально поляризованными волнами, приеме отраженных волн, разделении их на вертикальную и горизонтальную составляющие, формировании матрицы на основе поляризационных характеристик, при котором облучение цели и фона, производят линейно поляризованными волнами, излучающими в диапазоне широкополосного спектра частот не менее 20 МГц, регистрируют амплитуды uГГ - горизонтально излученной поляризации - горизонтально принятой, uГВ - горизонтально излученной поляризации - вертикально принятой, uГВ - вертикально излученной поляризацией - горизонтально принятой, uВВ - вертикально излученной поляризацией - вертикально принятой, и формировании полной поляризационной матрицы  для каждого i-го строба дальности, размер которого определен шириной спектра зондирующего сигнала, затем последовательно полученные поляризационные матрицы рассеивания для каждого i-го строба дальности преобразуют в матрицу наблюдений А следующего вида
для каждого i-го строба дальности, размер которого определен шириной спектра зондирующего сигнала, затем последовательно полученные поляризационные матрицы рассеивания для каждого i-го строба дальности преобразуют в матрицу наблюдений А следующего вида

где u - комплексная амплитуда сигнала, при этом каждая строка матрицы наблюдений соответствует поляризационным составляющим рассеянного сигнала, а количество строк соответствует количеству обрабатываемых элементов разрешения по дальности, размерность матрицы 4*n, где n - число обрабатываемых стробов дальности, полученную матрицу нормируют и далее формируют корреляционную матрицу, для которой вычисляют собственные значения и собственные вектора, формируя, таким образом, новую систему координат, а затем на полученные оси новой системы координат проецируют нормированную матрицу наблюдений А и выполняют нормировку, в результате получают матрицу вкладов VK наблюдений от  вида
вида
которую и используют для селекции цели на фоне подстилающей поверхности, при этом поиск и обнаружение цели в первую очередь выполняют по уровню сигнала в первом столбце матрицы вкладов наблюдений, а для распознавания цели на фоне подстилающей поверхности используют сигналы остальных столбцов.
Радиолокатор обеспечивает получение полной поляризационной матрицы в каждом стробе дальности в заданном азимутальном направлении, размер строба дальности не превышает некоторой, наперед заданной величины - разрешающей способности. При этом полагают, что разрешающая способность не хуже 8 метров (ширина спектра сигнала не менее 20 МГц). Вообще говоря, величина разрешающей способности по дальности ΔR зависит от габаритов цели L и должно выполняться соотношение ΔR ≤ L.
Для каждого i-го строба дальности получают полную поляризационную матрицу рассеивания Pi

Последовательно полученные матрицы рассеяния раскладываются в строку и образуют матрицу наблюдений следующего вида

Всего состояний четыре. Первый индекс соответствует номеру элемента разрешения по дальности, всего элементов дальности - М. При этом значения ui,j могут быть и комплексными и действительными. Далее рассматривается более общий случай - комплексные значения ui, j. В этой матрице второй индекс элемента соответствует состоянию поляризации: 1 - горизонтальная поляризация передатчика и горизонтальная поляризация приемника (ГГ); 2 - горизонтальная поляризация передатчика, вертикальная поляризация приемника (ГВ); 3 - вертикальная поляризация передатчика, вертикальная поляризация приемника (ВВ); 4 - вертикальная поляризация передатчика, горизонтальная поляризация приемника (ВГ).
Полученную матрицу наблюдений (2) нормируют. Для этого вычисляют математическое ожидание moj по столбцам (поляризациям) по формуле 
и дисперсию

Элементы матрицы нормализованных значений UN вычисляются по формуле

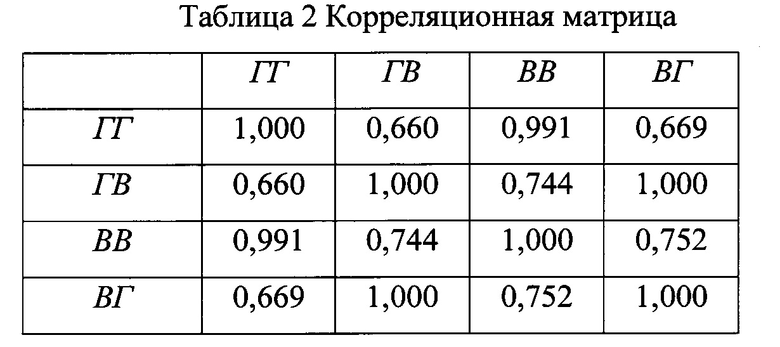
Затем, в соответствии с алгоритмом метода главных компонент вычисляется корреляционная матрица по формуле

где символ * означает комплексное сопряжение, а Т - транспонирование матрицы. В результате получим матрицу размерности 4×4, которая является Эрмитовой.
Для этой матрицы вычисляют собственные значения и, соответствующие им, собственные вектора.
В результате вычислений имеем вектор собственных значений -SZ:

значения которого действительные и неотрицательные, и упорядочиваем их по убыванию. Для этих собственных значений (7) вычисляем собственные вектора SVU и формируем матрицу собственных векторов вида

Полученные собственные вектора образуют новую систему координат. Рассчитываем проекции нормированной матрицы наблюдений UN на эти новые оси координат, которые принято называть факторами Fk. В матричной форме операция записывается как

Выполняем нормировку

и образуем матрицу вкладов наблюдений VK 
Полученная матрица (11) содержит четыре столбца, по числу факторов и М строк, соответствующих стробам дальности.
При этом в каждом столбце значения нормированы к единице. То есть сумма элементов каждого столбца равна единице.
Изобретение поясняется чертежом, где показаны:
на фиг. 1 - вид радиолокационной сцены для одного азимутального направления и расположение стробов дальности,
на фиг. 2 - структурная схема алгоритма,
на фиг. 3 - модель радиолокационной сцены,
на фиг. 4 - Значения ЭПР (эффективной площади рассеяния) для модельной
сцены,
на фиг. 5 - собственные значения матрицы корреляций,
на фиг.6 - вклады наблюдений.
Обнаружение цели и ее селекция на фоне природных образований с помощью матрицы вкладов (11) выполняется следующим образом.
Уровень сигнала в первом факторе (значения в первом столбце) (см. фиг. 2) определяется общей энергией отраженного сигнала, поэтому поиск и обнаружение цели в первую очередь выполняется по уровню сигнала в первом столбце. Для распознавания цели на фоне подстилающей поверхности используются сигналы остальных столбцов.
Регулярная цель (состоящая из набора отражателей) дает отклик в первом и втором факторах, то есть значения первого и второго столбца для соответствующего строба дальности (строки матрицы) превышают пороги обнаружения. В то же самое время значения по третьему и четвертому фактору (в третьем и четвертом столбце соответственно) не превышают пороговый уровень.
Нерегулярные цели, которые содержат множества неупорядоченных элементов, такие как трава, мелкая растительность и деревья, преимущественно группируются в третьем и четвертом факторах. Кроме того при высоком разрешении (1 м) прослеживается зеркальное отражение цели от поверхности.
В случае, когда требуется обнаружить цель на поверхности и не классифицировать саму поверхность алгоритм обнаружения можно представить в виде

Пороги обнаружения Р1 и Р2, по-видимому, следует подбирать по результатам экспериментов или используя адаптивный алгоритм с постоянным уровнем ложных тревог. При моделировании и отладке алгоритма селекции за основу можно взять следующие значения

Данный алгоритм поясняется на примере, где представлена реализация способа селекции цели на модели радиолокационной сцены (фиг. 1)
Объект (самоходная гаубица Palladin) расположен на неровной поверхности среди кустарника и дерева).
Угловой сектор по азимуту составляет 0,3 градуса, разрешение по дальности 1 м, всего моделировалось 40 стробов дальности.
В результате моделирования, для каждого строба дальности получены полные поляризационные матрицы вида

где σi,ИП - ЭПР в i-м элементе разрешения с соответствующей поляризацией излучения (И) и приема (П) с учетом переотражений.
Для модели радиолокационной сцены результаты расчета имеют вид, приведенный в таблице 1. В столбцах таблицы значения элементов поляризационной матрицы рассеивания, полученные по результатам моделирования. Строки таблицы соответствуют стробам дальности. Для реальных измерений РЛС эта таблица соответствует зондированию в одном азимутальном направлении по всем дальностным стробам за период накопления.

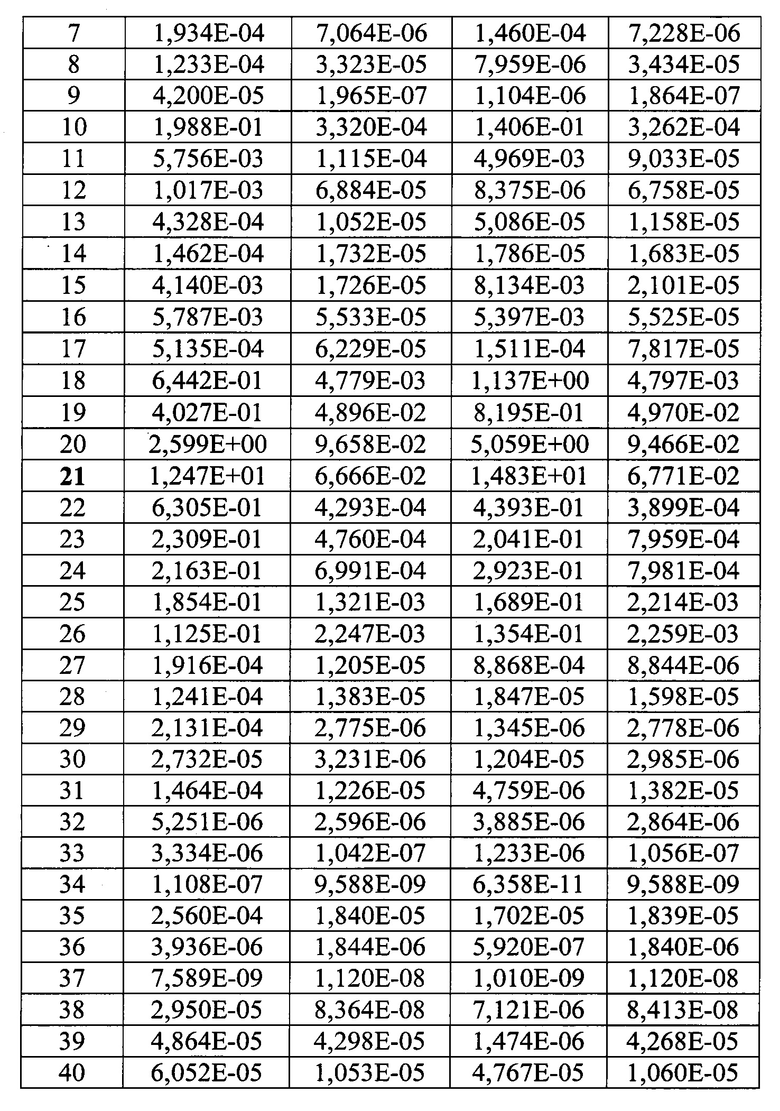
Нетрудно видеть, (табл. 1 и фиг. 4), что матрицы рассеяния не являются симметричными, элементы побочной диагонали не равны между собой, поскольку при моделировании учтены переотражения. Сигнал от цели и природных образований в основном сосредоточен на согласованных поляризациях и нет разделения цели и природных образований.
Для таблицы 1 исходных данных (матрицы наблюдений) корреляционная матрица имеет вид, приведенный в таблице 2.
Для этой корреляционной матрицы получены следующие собственные значения
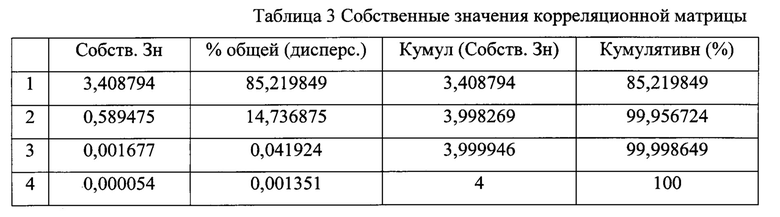
В соответствие с полученным распределением дисперсий (табл. 3) и величин собственных значений (фиг. 5), можно было бы ограничиться двумя первыми собственными значениями или даже одним, поскольку именно они объясняют практически 99% дисперсии.
Попутно заметим, что собственные вектора и собственные числа корреляционной матрицы обладают рядом полезных свойств: 1) линейно-независимы, что позволяет использовать их в качестве базиса; 2) собственные числа неотрицательные и действительные; 3) собственные векторы ортогональны друг другу и образуют ортонормированное множество.
Сумма собственных чисел корреляционной матрицы равна следу этой матрицы, а их произведение определителю.
Рассмотрим матрицу собственных векторов, образованных вектором собственных значений. То есть, по сути, матрицу перехода от поляризационного базиса к факторному.
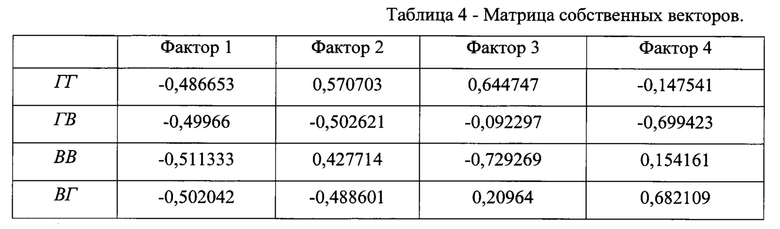
Можно отметить следующее.
Факторам 1 и 2 - можно приписать физический смысл общей энергетики
Фактор 3 - влияние основных поляризаций
Фактор 4 - влияние перекрестных поляризаций.
Дальнейшим шагом является расчет вклада наблюдений (поляризационной матрицы по стробам дальности) в соответствующие факторы. По сути, расчет проекций на новые оси координат - факторы.
Вклады наблюдений в табличном виде приведены в таблице 5 и на фиг. 6.
Из таблиц 1 и 5 и чертежа видно, что цель сосредоточена по факторным координатам 1 и 2, в то время как фоновые образования, такие как трава, кустарник и деревья сосредоточены в факторах 3 и 4.

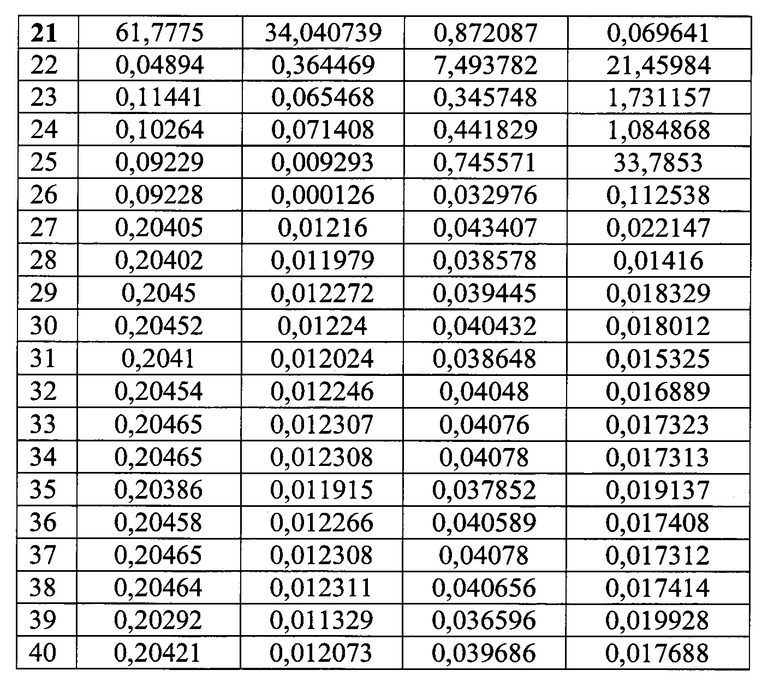
На фиг. 6 видно, что цель сосредоточена в первом и втором факторе, а природные образования в 3- м и 4- м факторах.
Таким образом, использование описанного способа селекции
радиолокационной цели на фоне подстилающей поверхности позволяет повысить достоверность распознавания цели на основе совместного анализа поляризационных матриц рассеяния по стробам дальности (элементам разрешения ΔR) в заданном угловом направлении.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ высокоточной пеленгации постановщика многократной ответно-импульсной помехи | 2020 |
|
RU2740296C1 |
| СПОСОБ КОМПЛЕКСНОЙ ЛОКАЦИИ ЦЕЛИ | 2009 |
|
RU2416108C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2012 |
|
RU2646847C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ГРУППОВЫХ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ | 2016 |
|
RU2649899C1 |
| Способ селекции движущихся целей | 2022 |
|
RU2820302C1 |
| СПОСОБ ЗАЩИТЫ БРОНЕТАНКОВОЙ ТЕХНИКИ | 2008 |
|
RU2373482C2 |
| Радиолокационная станция обнаружения малоразмерных целей | 2020 |
|
RU2744210C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ ПО ДАННЫМ БОРТОВОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС МАЛОВЫСОТНОГО ПОЛЕТА | 2007 |
|
RU2351949C1 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ПОЛЯРИЗАЦИОННОГО ПОРТРЕТА ЗЕМНОЙ ИЛИ МОРСКОЙ ПОВЕРХНОСТИ В ДВУХЧАСТОТНОЙ ЦИФРОВОЙ РСА | 1999 |
|
RU2166774C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ПРОВОДОВ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧ | 2006 |
|
RU2310885C1 |




Изобретение относится к радиолокации и может найти применение в радиолокаторах, которые обеспечивают получение полной поляризационной матрицы (ПМ) рассеивания. Достигаемый технический результат – повышение достоверности распознавания радиолокационных целей. Способ селекции радиолокационных целей на фоне подстилающей поверхности заключается в облучении цели двумя линейно ортогонально поляризованными волнами, приеме отраженных волн, разделении их на вертикальную и горизонтальную составляющие, формировании матрицы на основе поляризационных характеристик, причем облучение цели и фона производят линейно поляризованными волнами, излученными в полосе частот не менее 20 МГц, разделении рассеянных волн на вертикальную и горизонтальную поляризационные составляющие, при этом регистрируют амплитуды - горизонтально излученной поляризации - горизонтально принятой, горизонтально излученной поляризации - вертикально принятой, вертикально излученной поляризации - горизонтально принятой, вертикально излученной поляризации - вертикально принятой, формируют полную ПМ для каждого i-гo строба дальности, размер которого определен шириной спектра зондирующего сигнала, последовательно полученные ПМ рассеивания для каждого i-гo строба дальности преобразуют в матрицу наблюдений А, составляющие которой представляют собой комплексные значения амплитуд сигналов, при этом каждая строка матрицы наблюдений соответствует поляризационным составляющим рассеянного сигнала, а количество строк соответствует количеству обрабатываемых элементов разрешения по дальности, размерность матрицы 4*n, где n - число обрабатываемых стробов дальности, полученную матрицу нормируют, формируют корреляционную матрицу, для которой вычисляют собственные значения и собственные векторы, формируя, таким образом, новую систему координат, а затем на полученные оси новой системы координат проецируют нормированную матрицу наблюдений А, в результате получают матрицу вкладов наблюдений VK по дальности, которую и используют для селекции цели на фоне подстилающей поверхности, при этом поиск и обнаружение цели в первую очередь выполняют по уровню сигнала в первом столбце матрицы вкладов наблюдений, а для распознавания цели на фоне подстилающей поверхности используют сигналы остальных столбцов. 6 ил., 5 табл.
Способ селекции радиолокационных целей на фоне подстилающей поверхности, заключающийся в облучении цели двумя линейно ортогонально поляризованными волнами, приеме отраженных волн, разделении их на вертикальную и горизонтальную составляющие, формировании матрицы на основе поляризационных характеристик, отличающийся тем, облучение цели и фона производят линейно поляризованными волнами, излучающими в диапазоне широкополосного спектра частот не менее 20 МГц, разделяют рассеянные волны на вертикальную и горизонтальную поляризационные составляющие, регистрируют амплитуды  - горизонтально излученной поляризации - горизонтально принятой,
- горизонтально излученной поляризации - горизонтально принятой,  - горизонтально излученной поляризации - вертикально принятой,
- горизонтально излученной поляризации - вертикально принятой,  - вертикально излученной поляризации - горизонтально принятой,
- вертикально излученной поляризации - горизонтально принятой,  - вертикально излученной поляризации – вертикально принятой, формируют полную поляризационную матрицу
- вертикально излученной поляризации – вертикально принятой, формируют полную поляризационную матрицу 
для каждого i-го строба дальности, размер которого определен шириной спектра облучающего сигнала, затем последовательно полученные поляризационные матрицы рассеивания для каждого i-го строба дальности преобразуют в матрицу наблюдений А следующего вида: ,
,
где u - комплексная амплитуда сигнала, при этом строки матрицы наблюдений соответствуют поляризационным составляющим рассеянного сигнала, а количество строк соответствует количеству обрабатываемых элементов разрешения по дальности, размерность матрицы 4*n, где n - число обрабатываемых стробов дальности, полученную матрицу нормируют и формируют корреляционную матрицу, для которой вычисляют собственные значения и собственные векторы, формируя, таким образом, новую систему координат, а затем на полученные оси новой системы координат проецируют нормированную матрицу наблюдений А и выполняют нормировку, в результате получают матрицу вкладов наблюдений VK по дальности от (νk1.1…νk1.4) до (νkM.1…νkM.4) вида
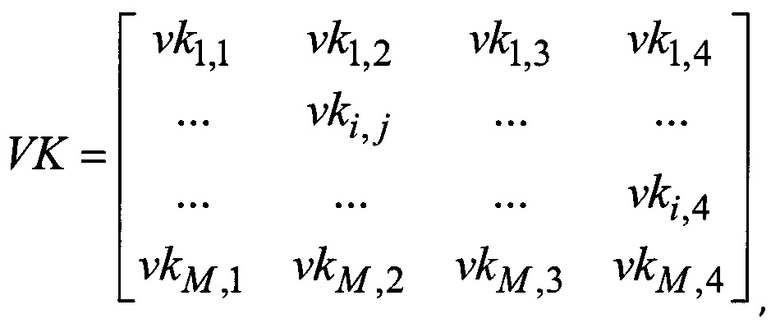
которую и используют для селекции цели на фоне подстилающей поверхности, при этом поиск и обнаружение цели в первую очередь выполняют по уровню сигнала в первом столбце матрицы вкладов наблюдений, а для распознавания цели на фоне подстилающей поверхности используют сигналы остальных столбцов.
| СПОСОБ ОБНАРУЖЕНИЯ И СЕЛЕКЦИИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ ПО ПОЛЯРИЗАЦИОННОМУ ПРИЗНАКУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476903C2 |
| СПОСОБ СЕЛЕКЦИИ РАДИОЛОКАЦИОННОЙ ЦЕЛИ С ИЗВЕСТНЫМИ ПОЛЯРИЗАЦИОННЫМИ ПАРАМЕТРАМИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2256194C2 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ПОЛЯРИЗАЦИОННОГО ПОРТРЕТА ЗЕМНОЙ ИЛИ МОРСКОЙ ПОВЕРХНОСТИ В ДВУХЧАСТОТНОЙ ЦИФРОВОЙ РСА | 1999 |
|
RU2166774C2 |
| ДАЛЬНОМЕР ДЛЯ ОБНАРУЖЕНИЯ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ЦЕЛЕЙ НА ФОНЕ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ | 1992 |
|
RU2038612C1 |
| US 6842154 B1, 11.01.2005 | |||
| US 5055805 A, 08.10.1991 | |||
| WO 2006133268 A2, 14.12.2006 | |||
| JP 2010256062 A, 11.11.2010. | |||

