Изобретение относится к радиолокации, в частности к радиолокационным способам обнаружения и определения местоположения движущихся целей при осуществлении кругового обзора пространства прежде всего в коротковолновом и ультракоротковолновом диапазонах волн, и может быть использовано для целей контроля воздушного движения и противовоздушной обороны.
Известен электромеханический способ последовательного кругового радиолокационного обзора. Недостатки этого способа - медленный обзор пространства, затруднительно получение высоких точности и разрешения по скорости и угловым координатам в коротковолновом и ультракоротковолновом диапазонах волн (Справочник по радиолокации. Ред. М. Сколник. В 4-х томах, М.: Сов. радио, 1972).
Известен способ последовательного кругового радиолокационного обзора с электрическим сканированием диаграммой направленности. Так, линейные фазированные антенные решетки имеют сектор сканирования не более 120o. Большие зоны обзора при электрическом сканировании получают с помощью объединения нескольких линейных решеток или применения круговой решетки (Радиотехнические системы. Под ред. проф. Ю.М. Казаринова, М., Высш. шк., 1990,С. 252-253: радиолокационная станция (РЛС) "MESAR" фирмы "Plessey" с электрическим сканированием 4 антенных решеток). В этом способе для получения высокого разрешения и высоких точностей по угловым координатам используют антенны с большой горизонтальной апертурой, в том числе при использовании разреженных решеток (что требует устранения неоднозначности измерений). Недостаток этого способа - также медленный обзор пространства, обусловленный последовательным перемещением диаграммы направленности, большая горизонтальная апертура антенн.
Известен способ параллельного кругового радиолокационного обзора пространства, реализованный в радиолокаторе RIAS - четырехкоординатном радиолокаторе (определяет дальность, азимут, угол места и радиальную скорость.CM.: D. Thibaud, J.P.Eglizeaud. 4D tracking processor for synthetic pulse and antenna radar (RIAS), RADAR-89, 1989, p. 370-374), работающий в метровом диапазоне волн. В RIAS применены круговые передающая и приемная антенные решетки, расположенные концентрически. Этот способ характеризуется ускоренным обзором пространства (одновременный обзор без формирования сканирующего луча), излучение и прием являются всенаправленными. Особенностью формирования излучаемого суммарного сигнала является всенаправленное излучение когерентных парциальных сигналов на разных частотах пространственно разнесенными антенными элементами (излучателями). /Далее под элементарным излучателем (излучателем) имеется в виду элементарная антенна (вибратор, щелевая антенна и т.п.), которая может работать как на излучение, так и на прием, и входящая как составной элемент в передающую или приемную антенну РЛС/. Таким образом, RIAS позволяет осуществлять кодирование облучаемого пространства: излучаемые в каждом направлении сигналы обладают свойствами индивидуального кода. Цель переотражает сигнал с тем же кодом, что является признаком зоны, в которой она находится. При этом местоположение цели определяется системой из простых приемников (RIAS, RADAR A IMPULSION ET ANTENNE SYNTHETIQUE / J.Dorey, G.Garnier, G. Auvray // International Conference on Radar.- Paris., 1989, April 24-28.- P.556-562; Le radar qui de'tecte les avions "invisibles"/ M.Chabreuil // L'Usine Nouvelle Technologies, 1989, v.64, mai, p.64-68). В данном способе кодирование предполагает использование ортогональных кодов излучаемого сигнала (например, использование сигналов на разных частотах), что необходимо, в частности, для равномерного облучения контролируемого пространства (RIAS, RADAR A IMPULSION ET ANTENNE SYNTHETIQUE / J.Dorey, G.Garnier // L'Onde Electrique, Nov.- Dec. 1989, V.69, N 6, P. 36-44). Особенностью приема являются цифровая обработка сигнала и цифровое формирование диаграммы направленности в неявном виде. Положение каждой цели определяется путем учета запаздываний ортогональных (парциальных) составляющих зондирующего сигнала от каждого отдельного излучателя передающей антенны до цели и от цели до каждого отдельного элемента приемной антенны. При этом при приеме реализуется пространственное сжатие излученного сигнала и временное сжатие совокупности излученных парциальных сигналов. Цифровая обработка включает когерентную обработку сигнала, которая реализует, в частности, преобразование дискретных частот принимаемых парциальных сигналов; функции фильтрации, назначение которых - селекция целей по доплеровской частоте, дальности, азимуту и углу. Непрерывное или квазинепрерывное излучение позволяет повысить разрешение по дальности и скорости.
Недостаток этого способа - необходимость использования антенн с большой горизонтальной апертурой, что существенно усложняет установку, эксплуатацию и время перебазирования радиолокационной станции, реализующей данный способ. Большие размеры горизонтальной апертуры обусловлены методом обработки принятых сигналов. К недостаткам данного способа относится сложность цифровой обработки, требующая выполнения большого количества вычислительных операций.
Наиболее близким техническим решением к предложенному решению является способ радиолокационного определения координат целей при одновременном круговом обзоре пространства (Заявка FR 2709835 A1, G 01 S 13/52), заключающийся в одновременном всенаправленном или локально направленном пространственно разнесенном излучении когерентных сигналов на одной частоте (в прототипе предусмотрен вариант реализации способа, когда сигнал излучается в узком диапазоне длин волн, см. заявку FR 2709835 A1, С. 6); одновременном, всенаправленном или локально направленном, пространственно разнесенном приеме отраженных от целей сигналов, селекции принятых сигналов по скорости и дальности, совместной обработке отселектированных по скорости и дальности сигналов с последующим выделением из помех. Совместная обработка отселектированных по скорости и дальности сигналов состоит в формировании диаграмм направленности и исключении ложных сигналов, принимаемых боковыми лепестками, с использованием статистической обработки. В данном способе предполагается излучение отдельных сигналов с такими характеристиками, чтобы при приеме они (сигналы) были идентифицированы.
Недостаток этого способа - необходимость использования антенн с большой горизонтальной апертурой.
Цель изобретения - уменьшение горизонтальной апертуры антенн; повышение темпа получения информации; улучшение эксплуатационных характеристик, таких как время и простота развертывания, перебазируемость РЛС, реализующей способ, повышение технологичности изготовления РЛС.
Поставленная цель достигается использованием нового принципа лоцирования целей, прежде всего обзора пространства и измерения азимута целей. Предложено реализовать "мгновенный" обзор по азимуту, осуществляемый за период следования импульсов высокой частоты излучаемого сигнала. При этом интенсивность излучения и чувствительность приема сигналов в горизонтальной плоскости одинаковы во всех направлениях. Это реализуется благодаря излучению сигналов с использованием всенаправленных (ненаправленных) в горизонтальной плоскости антенн с синфазным питанием и антенн с так называемым вращающимся полем (Мейнке Г. Г., Гундлах Ф.В. Радиотехнический справочник.- М.,:Л.: Госэлектроиздат, 1960, T. I, с. 346-356). Особенностью излучения последних является зависимость фазы излучаемых и принимаемых сигналов от азимута, что в предлагаемом способе используется для определения направления на цель. При этом использование всенаправленного излучения с зависимостью его фазы от азимута приводит к необходимости предварительного разрешения целей по дальности и/или скорости перед измерением азимута целей посредством определения фазы отселектированных сигналов в фильтровом поле "дальность - скорость". Излучение и прием сигналов осуществляются с помощью антенн с небольшой горизонтальной апертурой, приемопередающая антенна может представлять собой размещенные с ориентацией по всем азимутальным направлениям элементарные излучатели, крепящиеся к одной опорной мачте.
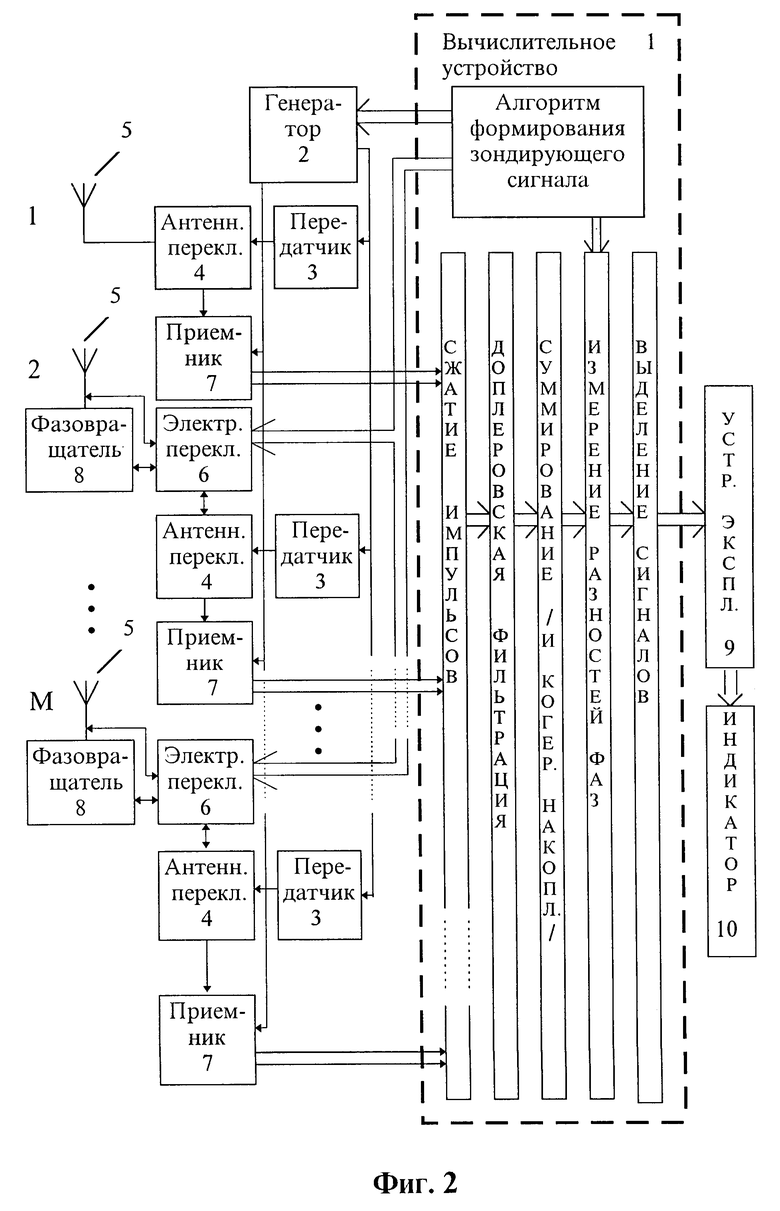
Всенаправленное по азимуту излучение может быть сформировано с помощью, например, круговой антенной решетки, имеющей малые по сравнению с длиной волны размеры. Изменение фазы всенаправленного излучения от азимута достигается возбуждением антенной решетки вращающимся полем. Такое излучение может быть получено, если сдвиг фаз между токами в отдельных излучателях, установленных по окружности, выбран так, что после обхода окружности получается фаза, отличающаяся от начальной на целое число 2 π. Из-за симметрии устройства интенсивность излучения в горизонтальной плоскости во всех направлениях одинакова, фаза же напряженности поля зависит от азимута. Для формирования вышеуказанного поля могут использоваться и направленные излучатели. В качестве примера рассмотрена АР, состоящая из 6 закрепленных с разворотом на 60o на вертикальной мачте бивибраторов с рефлекторами с фазами питания 0, 60, 120, 180, 240 и 300o. Учитывая, что диаграммы направленности в азимутальной плоскости повторяются через 60o, в пределах такого сектора были вычислены в функции азимута нормированные (относительно случая применения бивибраторов без рефлектора) значения напряженности поля (сплошные линии), фазы сигналов, деленные на 10 (кружки), для синфазного питания и питания по условиям формирования вращающегося поля, а также разности фаз для этих случаев (пунктирная линия) при значении отношения диаметра к длине волны, равном 0,5 (см. фиг. 1). Приведенная зависимость показывает, что разность фаз представляет собой практически линейную зависимость, то есть пеленгационная характеристика имеет достаточную крутизну во всем диапазоне углов, и имеется возможность измерения азимута путем измерения фазы принятого сигнала при использовании передающей антенны, не имеющей значительной по размера горизонтальной апертуры. Для достижения более высокой точности измерения азимута может быть использована малобазовая фазовая пеленгационная система, в которой приемные антенны разнесены на расстояние, например, нескольких длин волн. В частности, для более точного измерения азимута в круговой зоне требуется применение нескольких, например трех, приемных антенн.
Использование излучаемого вращающегося поля позволяет измерить азимут цели по измеренной фазе принятого сигнала, если исключить неизвестный и трудно измеримый точно набег фазы за счет распространения сигнала до цели и обратно.
Покажем возможность исключения набега фазы сигнала при его распространении в пространстве. Пусть опорный сигнал, излучаемый определенным излучателем антенны, с местоположением которого в антенне связано нулевое азимутальное направление:
Sоп = A0sin(ωмt+ϕоп),
где ωм - масштабная частота;
ϕоп - начальная фаза опорного сигнала.
Сигнал отраженного вращающегося поля, принятый с определенного азимутального направления:
S1 = A1sin(ωм(t-τ)+ϕ1+ϕот+ϕa1),
где τ - временная задержка сигнала при его распространении в пространстве;
ϕ1 - начальная фаза излученного в определенном азимутальном направлении (β1) сигнала вращающегося поля;
ϕот - фазовый сдвиг, возникающий при отражении сигнала от цели;
ϕa1 - фазовый сдвиг, возникающий в цепях аппаратуры.
Синфазный сигнал, излучаемый антенной в произвольном направлении и получаемый синфазной подачей сигналов на отдельные излучатели:
Sсин = Aсинsin(ωм(t-τ)+ϕсин+ϕот+ϕa2),
где ϕсин - начальная фаза синфазного сигнала, излученного в произвольном азимутальном направлении;
ϕa2 - фазовый сдвиг, возникающий в цепях аппаратуры.
Считаем, что временная задержка (τ) сигнала синфазного поля такая же, что и у сигнала вращающегося поля. Это допустимо, если излучаемый импульсный сигнал синфазного поля отстоит от излучаемого импульсного сигнала вращающегося поля на временной интервал, за который набег фазы мал по сравнению с точностью измерения азимута цели с помощью РЛС.
Тогда разность фаз сигналов S1 и Sсин
Таким образом, измерение ϕ1 (для любого азимутального направления) сводится к измерению разности фаз принятых сигналов в каналах антенн, соответствующих синфазному излучению и излучению вращающегося поля. Величина ϕсин считается известной, так как связана с величиной ϕоп линейной зависимостью, которая может быть заранее измерена в результате юстировочных работ с ретранслятором, удаленным на известное расстояние в известном азимутальном направлении по отношению к радиолокатору, и учитываться при определении ϕ1. Величина (ϕa1-ϕa2) также считается известной и может быть сведена к нулю аппаратурно. Если ϕоп отлична от нуля, то азимут (β1) цели, которой соответствует сигнал S1, определяется по формуле β1 = ϕ1-ϕоп.
Для измерения вышеупомянутых разностей фаз требуются разнесенные по времени передача и прием сигналов при синфазном возбуждении антенны (антенн) и передача и прием сигналов при возбуждении антенны (антенн) вращающимся полем.
Предлагаемый способ заключается в одновременном всенаправленном или локально направленном излучении (отдельными излучателями) М первых когерентных сигналов на одной частоте; одновременном, всенаправленном или локально направленном когерентном приеме (отдельными излучателями) N первых отраженных от целей сигналов и их селекции по скорости и дальности и последующем раздельном суммировании по каждому из дальностно-скоростных каналов с запоминанием результатов суммирования; дополнительном излучении с разнесением во времени по отношению к М первым излученным когерентным сигналам, одновременном, всенаправленном или локально направленном (отдельными излучателями), на той же частоте, что и М первых когерентных сигналов, М вторых когерентных сигналов с взаимным сдвигом фаз, обеспечивающим формирование вращающегося поля; одновременном, всенаправленном или локально направленном когерентном приеме N вторых отраженных от целей сигналов со сдвигами фаз, соответствующими сдвигам фаз излучаемых М вторых когерентных сигналов; селектировании N вторых принятых сигналов по скорости и дальности; суммировании N вторых отселектированных по скорости и дальности сигналов раздельно по каждому из дальностно-скоростных каналов; определении разностей фаз сигналов, просуммированных по дальностно-скоростным каналам и соответствующих N первым принятым сигналам, и сигналов, просуммированных по дальностно-скоростным каналам и соответствующих N вторым принятым сигналам; при этом разности фаз сигналов определяют для соответствующих друг другу дальностно-скоростных каналов; отселектированные по скорости и дальности сигналы выделяют из помех. Таким образом, после выполнения вышеперечисленных действий каждому из выделенных из помех сигналов поставлены в соответствие дальность (канал дальности), скорость (номер доплеровского фильтра) и азимут (значение разности фаз).
В общем случае число элементов приемной и передающей антенн может быть различно (М не равно N), поэтому и сдвиги фаз сигналов отдельных излучателей для формирования и приема вращающегося поля в общем случае различны.
Предполагается, что перед измерением разностей фаз и перед выделением сигналов из помех может производиться когерентное накопление принятых сигналов вращающегося поля и когерентное накопление принятых сигналов синфазного поля за несколько циклов приема и передачи. Учитывая когерентность излучения и приема сигналов вращающегося поля и сигналов синфазного поля, упомянутые когерентные накопления могут осуществляться при излучении "вложенных" пачек импульсов синфазного и вращающегося полей. Выделение сигналов из помех может производиться после измерения разностей фаз принятых сигналов синфазного и вращающегося полей, либо после выделения сигналов из помех измерение разностей фаз производится только для тех дальностно-скоростных каналов, в которых сигнал цели обнаружен (при этом измеренные фазы принятых сигналов синфазного и вращающегося полей должны предварительно запоминаться). Чтобы не терялась полезная информация, выделение сигналов из помех целесообразно производить после суммирования принятых сигналов синфазного и вращающегося полей в одинаковых дальностно-скоростных каналах.
На фиг. 1 представлены зависимости амплитуды и фазы излучаемого сигнала от азимута для шестиэлементной антенны для случаев синфазного возбуждения антенны и возбуждения вращающимся полем, а также зависимость разности фаз от азимута;
на фиг. 2 - схема устройства, реализующего способ.
Суть технического решения иллюстрирует описание конкретного примера реализации способа.
Устройство работает следующим образом (рассмотрим частный случай совмещенного использования антенн на прием и передачу).
В первом цикле в вычислительном устройстве 1 с помощью алгоритма формирования зондирующего сигнала вырабатываются цифровые сигналы, задающие параметры зондирующего сигнала, такие как длительность импульсов, количество импульсов в пачке, вид модуляции и другие и в том числе начальную фазу высокочастотных импульсов зондирующего сигнала, сигналы, синхронизирующие работу радиолокатора. Цифровые сигналы управляют генератором 2. При этом выходной когерентный сигнал генератора 2 формируется с заданной начальной фазой и поступает на М передатчиков 3, в которых осуществляются умножение частоты и усиление мощности сигналов. Когерентные сигналы с выходов М передатчиков 3 проходят через соответствующие М антенных переключателей 4 и поступают с первого антенного переключателя 4 на вход первого излучателя 5 (приемопередающего) непосредственно, а на входы других М-1 излучателей 5 сигналы с соответствующих антенных переключателей 4 поступают через М-1 электронных переключателей 6, работа которых синхронизируется вычислительным устройством 1, и затем излучаются. Отраженные целями сигналы принимаются со всех направлений М излучателями 5 и поступают на первый антенный переключатель 4 непосредственно, а на другие М-1 антенных переключателей 4, проходя через соответствующие М-1 электронных переключателей 6, работа которых синхронизируется вычислительным устройством 1, сигналы с выходов антенных переключателей 4 поступают в М приемников 7, в которых сигналы усиливаются, преобразуются по частоте и оцифровываются.
С цифровых выходов М приемников 7 сигналы поступают в вычислительное устройство 1, где последовательно производится сжатие импульсов (селекция по дальности), доплеровская фильтрация (селекция по скорости), суммирование сигналов по элементам фильтрового поля дальность-скорость и их запоминание. После этого в следующем втором временном цикле вычислительное устройство 1 вырабатывает цифровые сигналы, задающие параметры зондирующего сигнала и синхронизирующие работу радиолокатора. Цифровые сигналы управляются генератором 2. При этом выходной когерентный сигнал генератора 2 формируется с заданной начальной фазой (той же, что и в первом цикле) и поступает на М передатчиков 3, в которых осуществляются умножение частоты и усиление мощности сигналов. Когерентные сигналы с выходов М передатчиков 3 проходят через соответствующие М антенных переключателей 4 и поступают с первого антенного переключателя 4 на вход первого излучателя 5 непосредственно, а на вход других М-1 излучателей 5 сигналы с соответствующих антенных переключателей 4 поступают через соответствующие М-1 электронных переключателей 6, работа которых синхронизируется вычислительным устройством 1, и М-1 фазовращателей 8 (обратимых) и затем излучаются. Отраженные целями сигналы принимаются со всех направлений М излучателями 5 и поступают на первый антенный переключатель 4 непосредственно, а на другие М-1 антенных переключателей 4 проходят через соответствующие М-1 фазовращателей 8 и М-1 электронных переключателей 6, работа которых синхронизируется вычислительным устройством 1, сигналы с выходов антенных переключателей 4 поступают в М приемников 7, в которых сигналы усиливаются и преобразуются по частоте. С цифровых выходов М приемников 6 сигналы поступают в вычислительное устройство 1, где последовательно производятся сжатие импульсов (селекция по дальности), доплеровская фильтрация (селекция по скорости), суммирование сигналов по элементам фильтрового поля дальность-скорость. Затем производится определение разностей фаз по каждому элементу фильтрового поля "дальность-скорость" для запомненных в первом цикле сигналов и полученных во втором. После чего производится выделение просуммированных по каналам дальность-скорость сигналов из помех путем детектирования и пороговой обработки (выделение может производиться после суммирования в одинаковых дальностно-скоростных каналах сигналов, принятых в первом и втором циклах). Информация о наличии и координатах целей поступает в устройство эксплуатации 9 (см. прототип), которое обрабатывает и использует информацию и, в частности, обеспечивает подачу информации на индикатор 10.
Фазовый сдвиг в фазовращателях 8 (одинаковый в обе стороны), от первого до М-1, установлен с возрастанием на постоянную величину с тем, чтобы сформировать вращающееся поле. Размещенные по окружности М излучателей 5 формируют вращающееся поле, фаза которого зависит от азимута. Отраженные целями сигналы принимаются со всех направлений М излучателями 5, проходят через М-1 фазовращателей 6 с теми же сдвигами фазы, что и при передаче (кроме сигнала, принимаемого первым излучателем 5).
Поскольку в способе реализуется когерентная обработка сигналов, все передатчики 3 и приемники 7 синхронизируются сигналом генератора 2.
Излучатели 5 размещены на одной мачте по кругу. Возможность определения азимута целей определяется в частности тем, что излучаемый без дополнительного фазового сдвига (без прохождения через фазовращатель 8) сигнал с известной начальной фазой поступает на конкретный излучатель 5, что позволяет "привязать" фазу принимаемого сигнала вращающегося поля к конкретному азимутальному направлению. Начальная фаза опорного сигнала, получаемого с помощью генератора 2, в принципе, может определяться с помощью устройства аналого-цифрового преобразования и вычислительного устройства, чтобы быть учтенной при определении разностей фаз, а не "навязываться" опорному сигналу генератора 2. В общем случае количество излучателей в передающей и приемной антеннах может не совпадать, однако при этом принципы обработки сигналов остаются прежними. Доплеровская фильтрация и селекция по дальности могут производиться в любом порядке.
Другим частным случаем реализации способа является аналогичная РЛС, но в которой излучение и прием синфазного и вращающегося поля осуществляются антеннами, у которых излучатели не разнесены в горизонтальной плоскости (например, при использовании турникетных антенн).
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| Способ и станция резонансной радиолокации | 2016 |
|
RU2610832C1 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2194288C2 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| Способ радиолокации целей | 2023 |
|
RU2808952C1 |
| СПОСОБ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК ИЗМЕРЕНИЯ АЗИМУТА НАЗЕМНЫХ ЦЕЛЕЙ С УЧЕТОМ ОТРАЖЕНИЙ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2014 |
|
RU2572843C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ В НЕЛИНЕЙНОМ РАДИОЛОКАТОРЕ | 2015 |
|
RU2593595C1 |
| СПОСОБ И УСТРОЙСТВО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ ПО УГЛОВЫМ НАПРАВЛЕНИЯМ В ОБЗОРНЫХ РЛС | 2011 |
|
RU2480782C1 |
| АНТЕННО-ПРИЕМОПЕРЕДАЮЩАЯ СИСТЕМА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2000 |
|
RU2165665C1 |
Изобретение относится к радиолокации, в частности к радиолокационным способам обнаружения и определения местоположения движущихся целей при осуществлении кругового обзора пространства в коротковолновом и ультракоротковолновом диапазонах волн. Способ заключается в одновременном, всенаправленном или локально направленном синфазном излучении М первых когерентных сигналов на одной частоте; одновременном, всенаправленном или локально направленном когерентном приеме N первых отраженных от целей сигналов и их селекции по скорости и дальности и последующем раздельном суммировании по каждому из дальностно-скоростных каналов с запоминанием результатов суммирования; излучении с разнесением во времени по отношению к М первым излученным когерентным сигналам, одновременном, всенаправленном или локально направленном, на той же частоте, что и М первых когерентных сигналов, М вторых когерентных сигналов с взаимным сдвигом фаз, обеспечивающим формирование вращающегося поля; одновременном, всенаправленном или локально направленном когерентном приеме N вторых отраженных от целей сигналов со сдвигами фаз, соответствующими сдвигами фаз излучаемых М вторых когерентных сигналов; селектировании N вторых принятых сигналов по скорости и дальности; суммирования N вторых отселектированных по скорости и дальности сигналов раздельно по каждому из дальностно-скоростных каналов; определении разности фаз сигналов, просуммированных по дальностно-скоростным каналам и соответствующих N первым сигналам, и сигналов, просуммированных по дальностно-скоростным каналам и соответствующих N вторым принятым сигналам, при этом разности фаз сигналов определяют для соответствующих друг другу дальностно-скоростных каналов; отселектированные по скорости и дальности сигналов выделяют из помех. Технический результат заключается в уменьшении горизонтальной апертуры антенны и повышении темпа получения информации. 2 ил.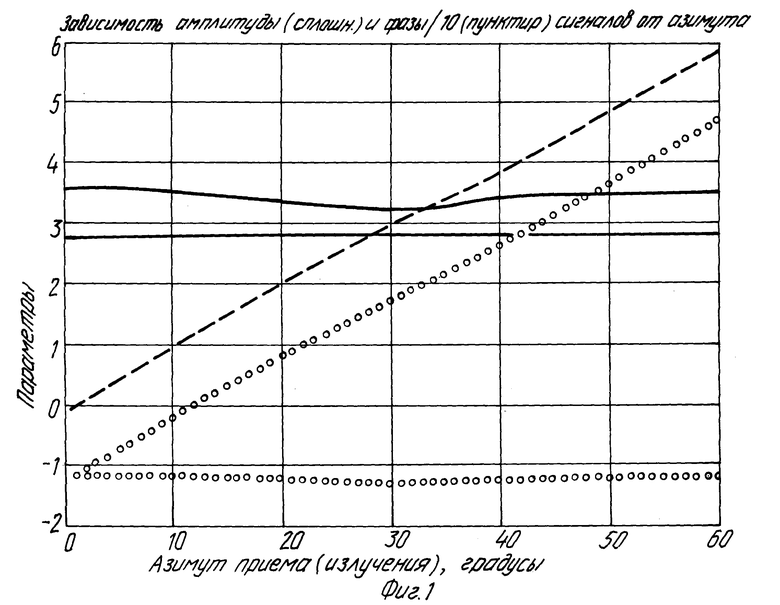
Способ радиолокационного определения координат целей, заключающийся в одновременном всенаправленном или локально направленном излучении М первых когерентных сигналов на одной частоте, одновременном, всенаправленном или локально направленном когерентном приеме N первых отраженных от целей сигналов, селекции N первых принятых сигналов по скорости и дальности совместной обработке N первых отселектированных по скорости и дальности сигналов с последующим выделением из помех, отличающийся тем, что М первых когерентных сигналов излучают синфазно, совместная обработка N первых отселектированных по скорости и дальности сигналов состоит в их раздельном суммировании по каждому из дальностно-скоростных каналов с последующим запоминанием результатов суммирования, дополнительно, с разнесением во времени по отношению к М первым излученным когерентным сигналам, одновременно, всенаправленно или локально направленно излучают на той же частоте, что и М первых когерентных сигналов, М вторых когерентных сигналов с взаимным сдвигом фаз, обеспечивающим формирование вращающегося поля; одновременно, всенаправленно или локально направленно когерентно принимают N вторых отраженных от целей сигналов со сдвигами фаз, соответствующими сдвигам фаз излучаемых М вторых когерентных сигналов, селектируют N вторых принятых сигналов по скорости и дальности, суммируют N вторых отселектированных по скорости и дальности сигналов раздельно по каждому из дальностно-скоростных каналов, определяют разности фаз сигналов, просуммированных по дальностно-скоростным каналам и соответствующих N первым принятым сигналам, и сигналов, просуммированных по дальностно-скоростным каналам и соответствующих N вторым принятым сигналам, при этом разности фаз сигналов определяют для соответствующих друг другу дальностно-скоростных каналов.
| СПОСОБ ОПТИМАЛЬНОГО ДОСТУПА К АБДОМИНАЛЬНОМУ ОТДЕЛУ ПИЩЕВОДА ИММУНОДЕФИЦИТНЫХ МЫШЕЙ ПРИ ОРТОТОПИЧЕСКОЙ ТРАНСПЛАНТАЦИИ ФРАГМЕНТА ОПУХОЛИ ПИЩЕВОДА ЧЕЛОВЕКА | 2018 |
|
RU2709835C1 |
| МАССАЖЕР | 1998 |
|
RU2141302C1 |
| US 4292635 A, 29.11.81 | |||
| Устройство для подвода энергии к подвижному объекту | 1976 |
|
SU616228A1 |
| US 4713664 A, 15.12.87 | |||
| СПОСОБ ПОЛУЧЕНИЯ МИКРОПОРИСТЫХ И КОЖЕПОДОБНЫХ РЕЗИН | 1961 |
|
SU215481A1 |
| EP 0227457 A, 01.07.87 | |||
| Сошник пневматической сеялки | 1973 |
|
SU490423A1 |
| SU 1141878 A, 20.02.96. | |||
