В настоящее время самые высокоточные АЦП напряжения строятся на принципе промежуточного компенсационного интегрирующего преобразования напряжения в сигнал одного из видов импульсной модуляции - ШИМ, ЧИМ, ФИМ, ИРМ (импульсно-разностной модуляции), КИМ (кодоимпульсной модуляции). Промежуточный сигнал суммируют в течение примыкающих циклов преобразования, длительность которых во много раз превышает период импульсной модуляции. Чем больше время преобразования, тем потенциально более высокая разрешающая способность может быть достигнута. Однако на этом пути есть серьезные ограничения, связанные с рядом методических и инструментальных погрешностей, из которых одной из основных является так называемая погрешность от краевых эффектов.
Наиболее высокая точность интегрирующих АЦП (ИАЦП) достигнута при использовании ИРМ. Ряд иностранных фирм, в том числе ANALOG DEVICES, BURR-BROWN, INTERSIL, TEXAS INSTRUENTS и другие, освоили массовый выпуск в интегральном исполнении ИАЦП с разрешением от 8 до 24 двоичных разрядов в интегральном исполнении [1, 2]. В зарубежной литературе такие ИАЦП принято называть ∑Δ-АЦП (в некоторых источниках Δ∑-АЦП).
Предлагаемое изобретение направлено на устранение погрешности ИАЦП от краевых эффектов. Поэтому рассмотрим природу этой погрешности на двух примерах.
На фиг.1, а представлена обобщенная функциональная схема ИАЦП, в которой может быть реализован любой вид импульсной модуляции [3]. В состав схемы входят следующие узлы: 1 - формирователь весовой функции go(t), 2 - перемножитель опорного напряжения Uo на весовую функцию go(t), 3 - перемножитель преобразуемого напряжения Ux на весовую функцию gx(t), 4 - формирователь весовой функции gx(t), 5 - сумматор, 6 - интегратор, 7 - устройство сравнения, 8 - формирователь порогового уровня, 9 - устройство управления, 10 - цифровой интегратор (счетчик импульсов), 11 - генератор тактовой частоты. Процессы, происходящие в ИАЦП, поясняются временной диаграммой на фиг.1, б. Конкретный вид диаграммы зависит от вида импульсной модуляции, реализуемой в ИАЦП. В данном случае реализуется фазоимпульсная модуляция. Формирователь порогового уровня 8 изменяет полярность порогового напряжения (на диаграмме соответствующая осциллограмма обозначена как 8') всякий раз, как выходное напряжение интегратора 6 (на диаграмме оно обозначено как 6') достигает порогового уровня. Однако это происходит не сразу после срабатывания устройства сравнения 7, а в момент прихода первого после срабатывания импульса тактовой частоты. Эти моменты отмечены на диаграмме вертикальными прямыми, изображенными в виде точек. Весовая функция go(t) синхронно с изменением порогового уровня меняет знак своего значения (по модулю оно равно единице), в результате чего изменяется полярность опорного напряжения, поступающего на вход сумматора 5 с выхода перемножителя 2.
Уравнение преобразования может быть представлено в следующем виде:

где ux(t) - преобразуемое напряжение; Uo - опорное (образцовое) напряжение; τo - постоянная времени интегратора 6; gx(t) и go(t) - весовые функции; tн и tк - моменты начала и конца интервала интегрирования (времени преобразования); I(tн) и I(tк) - значения выходной величины интегратора в начале и конце времени преобразования ИАЦП.
Как показано в работе [3], весовая функция gx(t) определяет динамические свойства ИАЦП, так как в ряде случаев (когда она четно- или нечетно-симметрична относительно интервала интегрирования) она полностью эквивалентна импульсной переходной функции, а во всех остальных случаях (gx(t) несимметрична) динамические свойства ИАЦП определяются импульсной переходной функцией, которая связана с весовой функцией простым соотношением - она зеркально симметрична по отношению к весовой функции (в математике подобные функции называют энантиаморфными). Для простоты в рассматриваемом алгоритме весовая функция gx(t) имеет постоянное значение, равное 1, в результате чего ИАЦП имеет амплитудно-частотную характеристику вида |Sinω(tк-tн)/ω(tк-tн)| [3], где ω - частота входного воздействия. Как известно, такая АЧХ имеет нули на частотах, кратных частоте 1/(tк-tн), что обеспечивает подавление помех с частотами, равными и кратными этой частоте.
Наличие в правой части уравнения (1) разности I(tк)-I(tн) и является источником погрешности, которую принято называть погрешностью от краевых эффектов. На выходе цифрового интегратора 10 формируется результат преобразования, выражаемый следующим соотношением, получающимся путем разрешения уравнения (1) относительно выходной величины  :
:

где (τo/Uо)I(tк), (τo/Uо)I(tн) - абсолютное значение погрешности от краевых эффектов.
Погрешность от краевых эффектов неизбежна при реализации любых известных алгоритмов интегрирующего развертывающего преобразования с промежуточным преобразованием в сигнал импульсной модуляции. Например, существуют алгоритмы преобразования напряжения в ШИМ сигнал, которые в статике обеспечивают значение ΔI=0, однако в динамике ΔI≠0.
Выше указывалось, что на сегодняшний день наивысшей точностью преобразования обладают ∑Δ-АЦП. Это достигнуто благодаря принятым в них мерам по уменьшению погрешности от краевых эффектов. Рассмотрим один из примеров ∑Δ-АЦП.
На фиг.2 представлена функциональная схема простейшей разновидности ∑Δ-АЦП [1]. Схема включает сумматор 1, интегратор 2, устройство сравнения 3 выходного напряжения интегратора 2 с нулевым уровнем, тактируемый триггер 4, цифровой фильтр 5, на выходе которого формируется результат преобразования, и переключатель 6 полярности опорного напряжения Uo. Алгоритм преобразования поясняется временной диаграммой на фиг.2, б. Всякий раз, как выходное напряжение интегратора пересекает нулевой уровень, происходит переключение полярности опорного напряжения в первый после срабатывания устройства сравнения тактируемый момент времени. Эти моменты на диаграмме показаны точечными вертикальными прямыми. Для лучшего понимания работы ИАЦП диаграмма фиг.2, б отображает процессы в ИАЦП для случая изменения полярности входного напряжения, это происходит в момент t+- (осциллограмма 7). Как и в ранее рассмотренном алгоритме, имеет место не равное нулю значение разности ΔI=I(tк)-I(tн), что является источником погрешности от краевых эффектов. Эта погрешность уменьшается (практически почти исключается) за счет применения цифровой фильтрации на этапе получения цифрового эквивалента выходной величины ИАЦП. Наличие цифрового фильтра существенно усложняет схемную реализацию ИАЦП, хотя при современном уровне технологии интегральных микросхем этот недостаток не считается очень существенным (цифровой фильтр реализуется с использованием ПЛМ). Тем не менее любое упрощение схемы повышает ее надежность. Поэтому независимо от уровня развития технологии более простые технические решения всегда будут предпочтительными.
Предлагаемое изобретение направлено на исключение погрешности от краевых эффектов с использованием способа, обеспечивающего упрощение алгоритма, и схемной реализации ИАЦП. Это достигается за счет того, что в процессе интегрирующего аналого-цифрового преобразования напряжения, основанном на интегрировании разности входного напряжения и промежуточного сигнала, получаемого путем импульсной модуляции интеграла от указанной разности, и суммировании промежуточных сигналов в течение примыкающих циклов преобразования, цифровой эквивалент выходной величины интегратора в момент времени, соответствующий границе между двумя циклами преобразования, вычитают из результата преобразования, полученного в предшествующем цикле, и прибавляют к результату, полученному в текущем цикле.
Для пояснения сути способа перепишем формулу (2), представляющую собой результат преобразования ИАЦП с учетом погрешности от краевых эффектов:

Рассмотрим три последовательных цикла преобразования: (n-1)-й, n-й и (n+1)-й. На границе между (n-1)-м и n-м циклами преобразования ИАЦП выходная величина интегратора для (n-1)-го цикла представляет собой значение I(tк), а для n-го (назовем его текущим) - значение I(tн). Пусть нами получено значение поправки, равное  (для этого надо получить цифровой или аналоговый эквивалент выходной величины интегратора I(tн) на границе между (n-1)-м и n-м циклами и умножить результат на постоянный коэффициент
(для этого надо получить цифровой или аналоговый эквивалент выходной величины интегратора I(tн) на границе между (n-1)-м и n-м циклами и умножить результат на постоянный коэффициент  ). Прибавим эту поправку к результату n-го цикла. Тогда результат преобразования в n-м цикле будет выражаться следующим соотношением:
). Прибавим эту поправку к результату n-го цикла. Тогда результат преобразования в n-м цикле будет выражаться следующим соотношением:

Пусть далее нами получен цифровой эквивалент выходной величины интегратора I(tк) на границе между n-м и (n+1)-м циклами. Умножим его на постоянный коэффициент  и вычтем из результата, полученного в n-м цикле. Получим результат преобразования в n-м цикле
и вычтем из результата, полученного в n-м цикле. Получим результат преобразования в n-м цикле

свободный от погрешности, порождаемой краевыми эффектами.
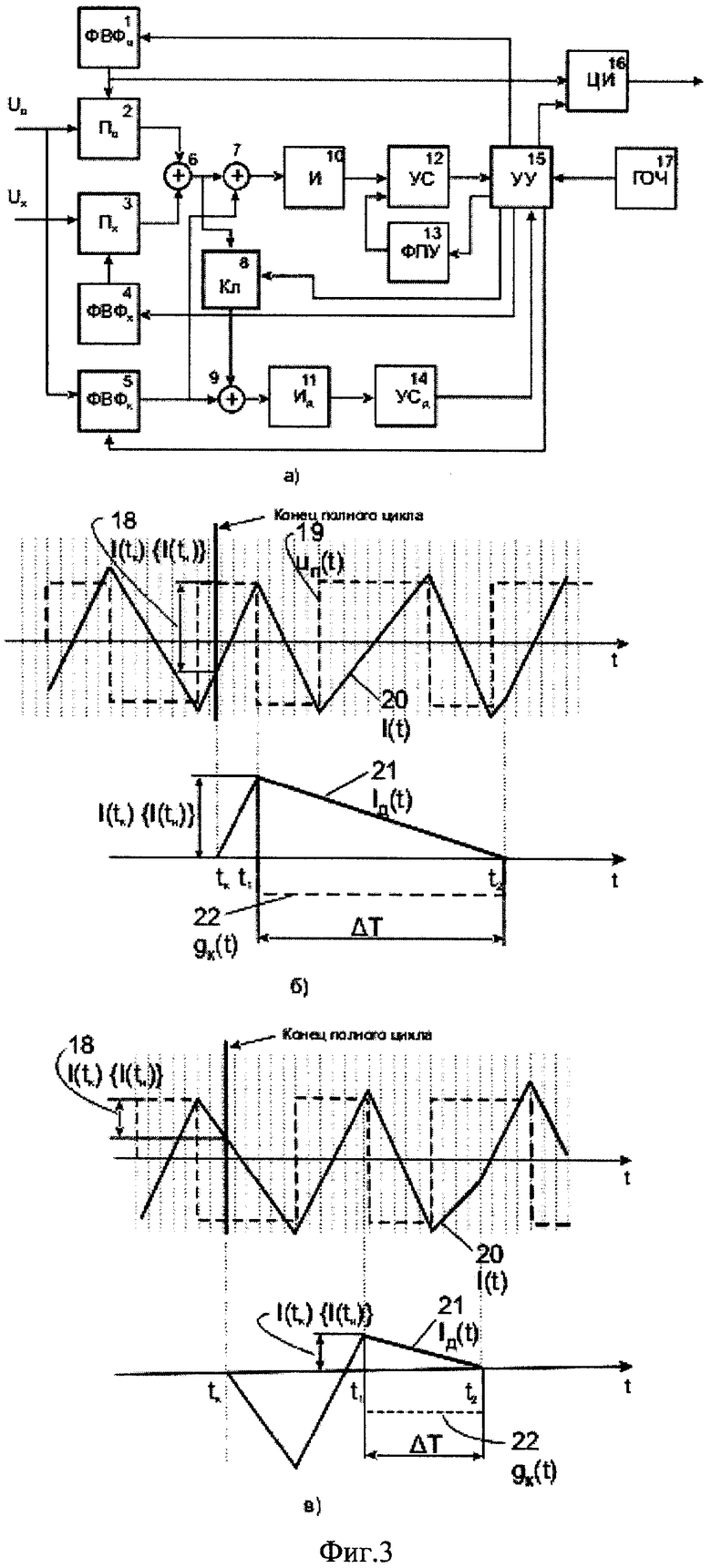
На фиг.3, а представлена функциональная схема одного из возможных вариантов реализации предлагаемого способа, которая отличается от схемы фиг.1, а тем, что она дополнена несколькими дополнительными блоками. Схема фиг.3, а включает: 1 - формирователь весовой функции go(t), 2 - перемножитель опорного напряжения Uо на весовую функцию go(t), 3 - перемножитель преобразуемого напряжения Ux на весовую функцию gx(t), 4 - формирователь весовой функции gx(t), 5 - формирователь весовой функции корректирующего канала, 6 - первый сумматор, 7 - второй сумматор, 8 - ключ, 9 - третий сумматор, 10 - основной интегратор, 11 - дополнительный интегратор, 12 - устройство сравнения, 13 - формирователь порогового уровня, 14 - дополнительное устройство сравнения, 15 - устройство управления, 16 - цифровой интегратор (счетчик импульсов), 17 - генератор тактовой частоты.
На фиг.3, б и в показаны фрагменты временной диаграммы процессов, происходящих в рассматриваемом ИАЦП в конце каждого полного цикла преобразования. Жирной вертикальной прямой обозначена граница между двумя соседними полными циклами преобразования. На диаграмме I(t) - это выходной сигнал основного интегратора И, un(t) - сигнал, формируемый на выходе ФПУ и задающий пороговый уровень для устройства сравнения УС.
Согласно предлагаемому способу для коррекции погрешности от краевых эффектов необходимо вычесть из результата преобразования (3) величину поправки  Реализуется это следующим образом. На интервале времени от конца полного цикла преобразования до момента, когда выходное напряжение основного интегратора достигает положительного порогового уровня, на дополнительный интегратор 11 (Ид) через ключ 8 и третий сумматор 9 подается тот же сигнал, что и на вход основного интегратора (ключ 8 открывается устройством управления 15 в течение интервала {tк, t1}). После этого на вход дополнительного интегратора 11 с выхода формирователя 5 подается через третий сумматор 9 произведение gкUo, где gк - корректирующая весовая функция (проще говоря - постоянный коэффициент). Найдем уравнение преобразования, выполняемого дополнительным каналом преобразования, включающим блоки 5, 11 и 14:
Реализуется это следующим образом. На интервале времени от конца полного цикла преобразования до момента, когда выходное напряжение основного интегратора достигает положительного порогового уровня, на дополнительный интегратор 11 (Ид) через ключ 8 и третий сумматор 9 подается тот же сигнал, что и на вход основного интегратора (ключ 8 открывается устройством управления 15 в течение интервала {tк, t1}). После этого на вход дополнительного интегратора 11 с выхода формирователя 5 подается через третий сумматор 9 произведение gкUo, где gк - корректирующая весовая функция (проще говоря - постоянный коэффициент). Найдем уравнение преобразования, выполняемого дополнительным каналом преобразования, включающим блоки 5, 11 и 14:

где τк - постоянная времени дополнительного интегратора.
Поскольку на интервале {t1, t2} имеем gx=0 и go(t)=0 (ключ 8 открыт только на интервале {tк, t1}, то уравнение (6) можно переписать в виде

Если выполнить соотношение τк=τо, то, очевидно, первые два слагаемых выражают приращение выходного напряжения основного интегратора за интервал {tк, t1}, т.е. значение I(tк). С учетом этого разрешим уравнение (7) относительно величины информативного интервала ΔT=t2-t1
Правая часть выражения (5) содержит величину I(tк), что позволяет использовать значение ΔT как поправку, которая вносится в результат (2) с целью устранения погрешности от краевых эффектов. С учетом ввода поправки выражение (3) принимает вид

Из выражения (9) следует, что составляющая  погрешности от краевых эффектов будет отсутствовать при выполнении условия
погрешности от краевых эффектов будет отсутствовать при выполнении условия

При выполнении этого условия выражение (9) принимает вид

Если в начале цикла, к которому относится результат (11), ввести поправку, равную составляющей  , но с противоположным знаком, то результат будет полностью свободным от погрешности, порождаемой краевыми эффектами. В схеме фиг.3, а это осуществляется следующим образом. В течение интервала ΔT через второй сумматор 7 на вход основного интегратора 10 подается выходная величина gкUo формирователя 5, в результате чего выходная величина основного интегратора 10 получит приращение, равное gкUoΔT, т.е. выражение (11) можно переписать в виде
, но с противоположным знаком, то результат будет полностью свободным от погрешности, порождаемой краевыми эффектами. В схеме фиг.3, а это осуществляется следующим образом. В течение интервала ΔT через второй сумматор 7 на вход основного интегратора 10 подается выходная величина gкUo формирователя 5, в результате чего выходная величина основного интегратора 10 получит приращение, равное gкUoΔT, т.е. выражение (11) можно переписать в виде

Подставим в (12) выражение (8) для ΔT, но при этом учтем, что для текущего цикла величина I(tк) является начальным значением выходной величины основного интегратора, поэтому вместо I(tк) в формуле (8) должна. фигурировать величина I(tн). В результате получим

Ранее указывалось, что для компенсации первой составляющей от краевых эффектов было необходимо выполнить условие τк=τo. С учетом этого условия выражение (13) принимает вид
Таким образом, в рассматриваемом варианте схемной реализации погрешность от краевых эффектов полностью (если не считать дискретности отсчета) устраняется. Заметим, что первая составляющая погрешности от краевых эффектов корректируется путем ввода поправки в цифровом виде, а вторая составляющая - путем ввода поправки в аналоговом виде.
Литература
1. Никамин В.А. Аналого-цифровые и цифро-аналоговые преобразователи. Справочник. М.: Альтекс-А, 2003 г. - 224 с.
2. Губнер Г.Б., Гутников B.C. Применение Δ∑ модуляции в измерительных устройствах. Сб. трудов: Микропроцессорные средства измерения. Санкт-Петебург. 1998 г., - с.3-14.
3. Шахов Э.К., Михотин В.Д. Интегрирующие развертывающие преобразователи. М.: Энергоатомиздат. 1986 г. - 144 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНТЕГРИРУЮЩЕГО АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ НАПРЯЖЕНИЯ | 2005 |
|
RU2292642C1 |
| СПОСОБ ИНТЕГРИРУЮЩЕГО АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ НАПРЯЖЕНИЯ | 2005 |
|
RU2294595C1 |
| СПОСОБ ИНТЕГРИРУЮЩЕГО АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ | 2006 |
|
RU2303327C1 |
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ | 2018 |
|
RU2725678C2 |
| СПОСОБ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ ИЗМЕРИТЕЛЬНЫХ СИГНАЛОВ | 2009 |
|
RU2444125C2 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1991 |
|
RU2012132C1 |
| Способ определения наличия успокоения механической системы | 1990 |
|
SU1755059A1 |
| Интегрирующий аналого-цифровой преобразователь | 1987 |
|
SU1628204A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1993 |
|
RU2110886C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА | 1995 |
|
RU2089924C1 |

Изобретение относится к информационно-измерительной технике, в частности - к методам измерения электрического напряжения, и направлено на увеличение точности преобразования напряжения в код за счет уменьшения составляющей методической погрешности от краевых эффектов. В результате открывается возможность достижения технического результата - создания цифровых измерительных приборов и устройств преобразования аналогового сигнала в код, обеспечивающих измерение постоянного и переменного напряжений с меньшей погрешностью и упрощение схемной реализации по сравнению с существующими способами. Сущность предлагаемого изобретения: способ интегрирующего аналого-цифрового преобразования напряжения, основанный на интегрировании разности входного напряжения и промежуточного сигнала, получаемого путем импульсной модуляции интеграла от указанной разности, и суммировании промежуточных сигналов в течение примыкающих циклов преобразования, отличается тем, что цифровой эквивалент выходной величины интегратора в момент времени, соответствующий границе между двумя циклами преобразования, умноженный на постоянный коэффициент, вычитают из результата преобразования, полученного в предшествующем цикле, и прибавляют к результату, полученному в текущем цикле, причем упомянутый постоянный коэффициент подбирают из условия компенсации погрешности от краевых эффектов. 3 ил.
Способ интегрирующего аналого-цифрового преобразования напряжения, основанный на интегрировании разности входного напряжения и промежуточного сигнала, получаемого путем импульсной модуляции интеграла от указанной разности, и суммировании промежуточных сигналов в течение примыкающих циклов преобразования, отличающийся тем, что цифровой эквивалент выходной величины интегратора в момент времени, соответствующий границе между двумя циклами преобразования, умноженный на постоянный коэффициент, вычитают из результата преобразования, полученного в предшествующем цикле, и прибавляют к результату, полученному в текущем цикле, причем упомянутый постоянный коэффициент подбирают из условия компенсации погрешности от краевых эффектов.
| Аналого-цифровой преобразователь | 1983 |
|
SU1152088A1 |
| УСТРОЙСТВО ДЛЯ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ | 1995 |
|
RU2117389C1 |
| УГЛОВОЙ ПРИВОД СУДОВОГО ДВИЖИТЕЛЯ | 0 |
|
SU234875A1 |

