Настоящее изобретение относится к демонтажному устройству для стропа, предназначенного для подъема тяжелого груза, например проволочного троса, троса из резиновых волокон, стренги, цепи и тому подобного, используемого для подъема тяжелого груза.
Что касается обычного устройства этого типа, то оно раскрыто в японском патенте JP-A-7-25578, в котором описано демонтажное устройство для элемента, предназначенного для подъема тяжелого груза, в котором верхние стальные тросы находятся между основанием и крюком крана, нижние стальные тросы, базовые концы которых закреплены на основании, входят в зацепление соответственно с теми частями тяжелого груза, которые предназначены для зацепления со стальными тросами, а кольца на концах нижних стальных тросов установлены на опоре, смонтированной на основании. В этом устройстве основание включает в себя пару пластин, каждая из которых выполнена приблизительно в виде прямоугольника, пару боковых пластин, расположенных по обоим краям упомянутых пластин для их соединения с обеспечением заданного промежутка, и нижний блок, расположенный по центру нижнего края парных пластин. В парных пластинах по их центру соответственно выполнены противоположные Т-образные отверстия, а на нижнем блоке установлена опора, которая выступает в Т-образные отверстия.
На опоре с возможностью скольжения установлен ползун, имеющий передний конец, в ненагруженном состоянии подталкиваемый вверх первым упругим телом, так что этот конец будет прилегать к верхней части опоры, а средство опускания ползуна выполнено таким образом, чтобы опускать его, преодолевая силу упругости первого упругого тела. Далее, предусмотрено блокирующее средство, чтобы временно заблокировать ползун в его опущенном положении, а также предусмотрено средство деблокирования для деблокирования заблокированного ползуна. Кроме того, средство опускания ползуна включает в себя шток датчика, который вставлен в основание с возможностью перемещения в вертикальном направлении, донная часть которого выступает вниз от донной части основания, и который подсоединен к ползуну через натяжной элемент.
При такой компоновке демонтажного устройства вначале подвешивают основание посредством крюка крана на верхних стальных тросах и опускают основание на верхнюю поверхность тяжелого груза или на грунт вблизи от тяжелого груза, так что шток датчика, выступающий вниз из донной части основания, заталкивается в основание и ползун опускается, преодолевая силу упругости первого упругого тела. В это время блокирующее средство временно блокирует ползун в его нижнем положении. Далее нижние стальные тросы вводят в зацепление с частями тяжелого груза, предназначенными для зацепления со стальными тросами, после чего кольца на концах нижних стальных тросов крепят к опоре соответственно через Т-образные отверстия. Тяжелый груз в этом положении поднимают краном и выгружают в заданном месте, а заблокированный ползун деблокируют с помощью средства деблокирования, при этом происходит подталкивание ползуна вверх к верхней части опоры под действием силы упругости первого упругого тела и кольца нижних стальных тросов будут удалены с опоры. Когда основание в этом положении поднято краном, нижние стальные тросы удаляют с частей тяжелого груза, предназначенных для зацепления со стальными тросами, и освобождают от тяжелого груза. В данном случае нижние стальные тросы могут быть демонтированы с тяжелого груза путем выполнения простой операции, тем самым обеспечивая значительную экономию затрат труда.
В случае демонтажного устройства для элемента, предназначенного для подъема тяжелого груза, которое раскрыто в вышеупомянутом японском патенте JP-A-7-25578, требуется создать большое количество типов устройств, от малого размера до большого размера, соответственно тяжелым грузам, предназначенным для подъема. Однако, поскольку степень увеличения размера колец нижних стальных тросов больше, чем степень увеличения размера устройств, когда увеличиваются веса тяжелых грузов, размер Т-образных отверстий в пластинах также должен быть увеличен соответствующим образом, а это создает проблему, заключающуюся в том, что размер пластин будет больше требуемого размера.
Кроме того, когда кольца увеличены по размеру и по весу, также требуется увеличить модуль упругости первого упругого тела для подталкивания колец вверх. Это требует большей силы для опускания ползуна, то есть устройство в целом выполняют так, чтобы ползун обладал способностью опускаться под собственным весом, преодолевая силу упругости первого упругого тела, что создает другую проблему, заключающуюся в том, что вес устройства будет больше требуемого веса.
Задача настоящего изобретения заключается в создании демонтажного устройства для стропа, предназначенного для подъема тяжелого груза, которое способно обеспечить прочность, соответствующую весу тяжелого груза при его подъеме, с необходимостью лишь минимального увеличения размера устройства.
Еще одна задача настоящего изобретения заключается в создании демонтажного устройства для стропа, предназначенного для подъема тяжелого груза, которое обеспечивает гарантированное предотвращение отсоединения дальних концов соединительных рычагов от дальних концов держателей рычагов, когда поднят тяжелый груз, и может обеспечить легкий и быстрый демонтаж стропов с тяжелого груза, когда этот груз опущен на заданное место.
Как показано на фиг.1 и фиг.4, изобретение согласно п.1 формулы изобретения представляет собой усовершенствованное демонтажное устройство для стропа, предназначенного для подъема тяжелого груза, содержащее:
основание 16 с расположенной на его верхнем конце частью 27 для зацепления краном, с которой должен входить в зацепление крюк 26а крана 26 или крюковой блок; держатель 17 рычага, шарнирно подсоединенный по существу по его центру к первому валу 11, прикрепленному к основанию 16 ниже части 27, предназначенной для зацепления краном;
соединительный рычаг 18, включающий в себя ближний конец, с возможностью поворота установленный на втором валу 12, прикрепленном к основанию 16 ниже первого вала 11, и дальний конец, предназначенный для зацепления с дальним концом держателя 17 рычага, при этом один конец стропа 13, включающего в себя другой конец, который предназначен для подвешивания на крюке крана или на основании 16, так чтобы он мог входить в зацепление с тяжелым грузом 14, с возможностью отсоединения подвешен на соединительном рычаге 18;
средство отсоединения 19 для опускания ближнего конца держателя 17 рычага и поднятия дальнего конца держателя 17 рычага, тем самым высвобождая дальний конец соединительного рычага 18 от дальнего конца держателя 17 рычага.
Характерная компоновка устройства состоит в том, что средство отсоединения 19 содержит ползун 31, с возможностью перемещения в вертикальном направлении установленный на основании 16 для зацепления с ближним концом держателя 17 рычага, тем самым вызывая поджатие ближнего конца держателя 17 рычага в направлении его толкания вниз, в том, что ползун 31 включает в себя поднимающийся/опускающийся шток 31а и зацепную пластину 31b, которая выполнена за одно целое на верхней части поднимающегося/опускающегося штока 31а и которая проходит по горизонтали или наклонена, и в том, что зацепной пластине 31b придана конфигурация для зацепления с ближним концом держателя 17 рычага. В демонтажном устройстве для стропа, предназначенного для подъема тяжелого груза, которое раскрыто в п.1 формулы изобретения, с крюком 26а крана 26 вначале входит в зацепление часть 27, предназначенная для зацепления с краном, при этом один конец стропа 13 будет подвешен на крюке крана или на основании 16. Далее основание 16 расположено непосредственно над тяжелым грузом 14, строп 13 входит в зацепление с тяжелым грузом 14, а другой конец стропа 13 подвешивают на соединительный рычаг 18, и после этого дальний конец соединительного рычага входит в зацепление с дальним концом держателя 17 рычага. Когда тяжелый груз 14 поднят краном 26, относительно большая сила, обусловленная крутящим моментом на основе веса тяжелого груза 14, будет приложена в наружном направлении к дальнему концу соединительного рычага 18, то есть будет приложена в направлении прижима дальнего конца соединительного рычага 18 к дальнему концу держателя 17 рычага, так что увеличивается сила трения между дальним концом соединительного рычага 18 и дальним концом держателя 17 рычага, тем самым сохраняя состояние, при котором дальний конец соединительного рычага находится в зацеплении с дальним концом держателя рычага. Далее, если тяжелый груз 14 опущен в заданном месте при таком состоянии, когда ползун 31 средства отсоединения 19 опущен и зацепная пластина 31b находится в зацеплении с ближним концом держателя рычага 17, чтобы таким образом обеспечить действие на него собственного веса ползуна 31, со стропа 13 будет снято напряжение и сила, действующая на дальний конец соединительного рычага 18, будет устранена, при этом дальний конец соединительного рычага 18 может быть легко отсоединен от дальнего конца держателя 17 рычага посредством собственного веса ползуна 31. Когда дальний конец соединительного рычага отсоединен от дальнего конца держателя рычага, дальний конец соединительного рычага 18 будет повернут вниз. Когда основание 16 поднято краном 26 в этом состоянии, другой конец стропа 13 высвобождается от соединительного рычага 18 и после этого строп 13 высвобождается от тяжелого груза 14, поэтому строп 13 будет поднят вместе с основанием 16.
Как показано на фиг.7 и фиг.8, изобретение, выполненное по п.1 формулы изобретения, согласно п.2 формулы изобретения отличается тем, что:
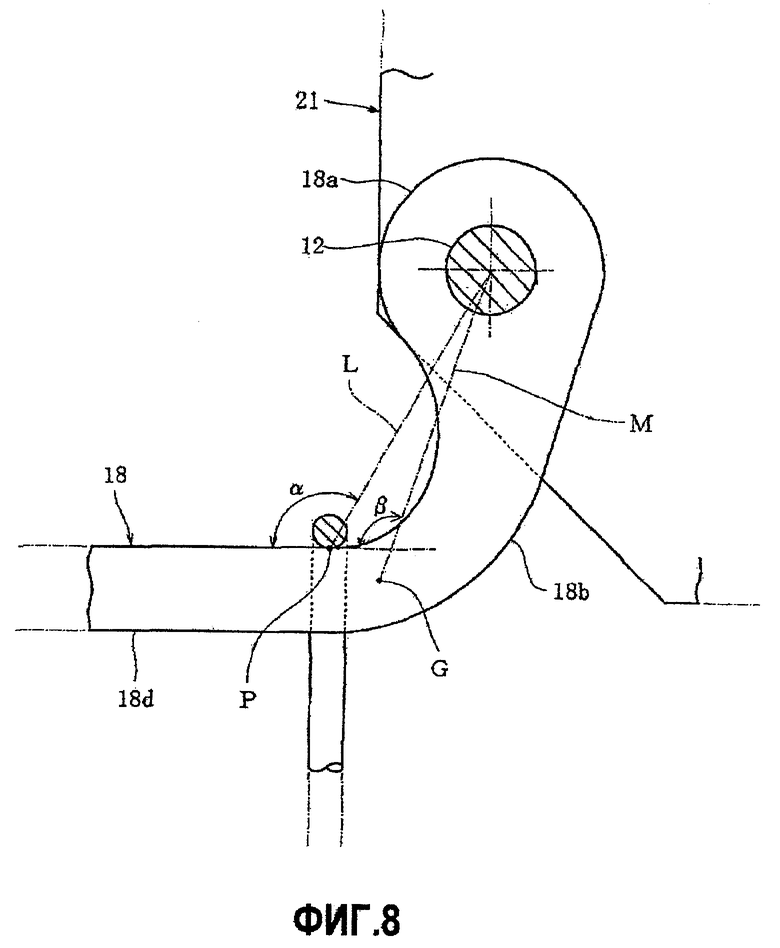
соединительный рычаг 18 включает в себя: ближнюю концевую часть 18а, с возможностью поворота установленную на втором валу 12; криволинейную часть 18b, непрерывно продолжающуюся к ближней концевой части 18а и изогнутую по заданному радиусу кривизны; дальнюю концевую часть 18с, имеющую возможность зацепления с дальним концом держателя 17 рычага; балочную часть 18d, соединяющую криволинейную часть 18b и дальнюю концевую часть 18с друг с другом;
при этом сделано допущение о том, что имеется:
предельная точка действия Р, которая представляет собой положение, при котором другой конец стропа 13 входит в контакт с соединительным рычагом 18, когда соединительный рычаг 18 повернут вокруг второго вала 12 так, что балочная часть 18d будет переведена из вертикального положения в горизонтальное положение посредством отсоединения соединительного рычага 18 от держателя 17 рычага, из состояния, в котором другой конец стропа 13, находящийся в зацеплении с тяжелым грузом 14, подвешен на соединительном рычаге 18 и дальний конец соединительного рычага 18 находится в зацеплении с дальним концом держателя 17 рычага;
угол α, который образован между прямой линией L, соединяющей центральную точку второго вала 12 с предельной точкой действия Р, и внутренней линией балочной части 18d;
угол β, который образован между прямой линией М, соединяющей центральную точку второго вала 12 с центром тяжести G соединительного рычага 18, и внутренней линией балочной части 18d;
при этом один или каждый из углов α и β образован так, чтобы они образовывали тупой угол.
В демонтажном устройстве для стропа, предназначенного для подъема тяжелого груза, которое раскрыто в п.2 формулы изобретения, если угол α, образованный между прямой линией L, соединяющей центральную точку второго вала 12 с предельной точкой действия Р, и внутренней линией балочной части 18d, представляет собой тупой угол в случае, когда вес тяжелого груза 14 значительно больше, чем собственный вес соединительного рычага 18, и в случае, когда соединительный рычаг 18 отсоединен от держателя 17 рычага и основание 16 поднято так, что балочная часть 18d переведена из вертикального положения в горизонтальное положение, соединительный рычаг 18 поворачивается далее в направлении перехода из горизонтального положения в направленное вниз положение, так что другой конец стропа 13 отсоединяется от соединительного рычага 18. Кроме того, когда угол β, образованный между прямой линией М, соединяющей центральную точку второго вала 12 с центром тяжести G соединительного рычага 18, и внутренней линией балочной части 18d, представляет собой тупой угол в том случае, когда вес тяжелого груза 14 относительно невелик, так что собственный вес соединительного рычага 18 влияет на его крутящий момент, и в том случае, когда соединительный рычаг 18 отсоединен от держателя 17 рычага и основание 16 поднято так, что балочная часть 18d переведена из вертикального положения в горизонтальное положение, соединительный рычаг 18 поворачивается далее в направлении перехода из горизонтального положения в направленное вниз положение, так что другой конец стропа 13 отсоединяется от соединительного рычага 18.
Как показано на фиг.1 и фиг.4, изобретение по п.1 формулы изобретения согласно п.3 формулы изобретения отличается тем, что:
средство отсоединения 19 в дополнение к ползуну 31 содержит:
блокирующее средство 32, расположенное на основании 16 и входящее в зацепление с ползуном 31, чтобы таким образом временно заблокировать ползун 31 в поднятом положении;
средство деблокирования 33 для деблокирования временно заблокированного ползуна 31;
когда вес тяжелого груза 14 приложен к соединительному рычагу 18 через строп 13, сохраняется такое состояние, при котором дальний конец соединительного рычага 18 находится в зацеплении с дальним концом держателя 17 рычага;
ползун 31 выполнен таким образом, чтобы он поднимал дальний конец держателя 17 рычага для отсоединения дальнего конца соединительного рычага 18 от дальнего конца держателя 17 рычага, когда временно заблокированный ползун 31 будет деблокирован с помощью средства деблокирования 33 и вес тяжелого груза 14 не будет приложен к соединительному рычагу 18 через строп 13.
В демонтажном устройстве для стропа, предназначенного для подъема тяжелого груза, которое раскрыто в п.3 формулы изобретения, крюк 26а крана 26 вначале входит в зацепление с частью 27, предназначенной для зацепления краном, и один конец стропа 13 подвешивают на крюке крана или на основании 16. В этом состоянии, когда основание 16 расположено как раз над тяжелым грузом 14 и ползун 31 поднят, блокирующее средство 32 временно блокирует ползун 31 в поднятом состоянии, так что собственный вес ползуна 31 не будет приложен к ближнему концу держателя 17 рычага, поэтому происходит опускание дальнего конца держателя 17 рычага. Далее, строп 13 находится в зацеплении с тяжелым грузом 14, другой конец стропа подвешен на соединительном рычаге 18, и дальний конец соединительного рычага 18 находится в зацеплении с дальним концом держателя 17 рычага. В этом положении, когда тяжелый груз 14 поднят краном 26, сохраняется состояние, при котором дальний конец соединительного рычага 18 находится в зацеплении с дальним концом держателя 17 рычага идентично п.1 формулы изобретения. Затем, когда тяжелый груз 14 опускают в заданном месте, напряжение со стропа 13 будет снято и сила, действующая на дальний конец соединительного рычага 18, будет устранена. В этом состоянии, когда заблокированный ползун 31 деблокирован средством деблокирования 33, ползун 31 будет опущен и ближний конец держателя 17 рычага смещается вниз под действием собственного веса ползуна 31, так что дальний конец держателя рычага будет поднят и дальний конец соединительного рычага 18 будет отсоединен от держателя 17 рычага, чтобы таким образом повернуть вниз дальний конец соединительного рычага. Кроме того, когда основание 16 поднято краном 26, другой конец стропа 13 будет отделен от соединительного рычага 18, а затем строп 13 будет отсоединен от тяжелого груза 14, поэтому строп 13 будет поднят совместно с основанием 16.
Как показано на фиг.1, 4 и 9, изобретение по п.3 формулы изобретения согласно п.4 формулы изобретения отличается тем, что:
основание 16 включает в себя первую пластину 21 и вторую пластину 22, обе из которых проходят в вертикальном направлении, и фиксирующую пластину 24, установленную между первой пластиной 21 и второй пластиной 22, так чтобы она проходила в горизонтальном направлении или была наклонена, соединяя при этом первую пластину 21 со второй пластиной 22, причем фиксирующая пластина 24 образована со сквозным отверстием 24а;
поднимающийся/опускающийся шток 31а ползуна 31 свободно вставляют через сквозное отверстие 24а;
когда вес тяжелого груза 14 приложен к соединительному рычагу 18 через строп 13, сохраняется состояние, при котором дальний конец соединительного рычага 18 находится в зацеплении с дальним концом держателя 17 рычага;
зацепная пластина 31b выполнена с возможностью поднятия дальнего конца держателя 17 рычага посредством собственного веса, по меньшей мере, поднимающегося/опускающегося штока 31а и зацепной пластины 31b, чтобы таким образом отсоединить дальний конец соединительного рычага 18 от дальнего конца держателя 17 рычага, когда вес тяжелого груза 14 не приложен к соединительному рычагу 18 через строп 13.
В демонтажном устройстве для стропа, предназначенного для подъема тяжелого груза, которое раскрыто в п.4 формулы изобретения, крюк 26а крана 26 вначале входит в зацепление с частью 27, предназначенной для зацепления с крюком, и один конец стропа 13 будет подвешен на крюке крана или на основании 16. В этом состоянии, когда основание 16 расположено как раз над тяжелым грузом 14 и строп 31 поднят, блокирующее средство 32 временно блокирует поднимающийся/опускающийся шток 31а в поднятом состоянии, поэтому собственный вес ползуна 31 не будет приложен к ближнему концу держателя 17 рычага, чтобы таким образом повернуть держатель 17 рычага в положение, в котором дальний конец соединительного рычага 18 может входить в зацепление с дальним концом держателя 17 рычага. Далее, ползун 13 находится в зацеплении с тяжелым грузом 14, другой конец ползуна подвешен на соединительном рычаге 18, а дальний конец соединительного рычага 18 находится в зацеплении с дальним концом держателя 17 рычага. В этом положении, если тяжелый груз 14 поднят краном 26, сохраняется состояние, при котором дальний конец соединительного рычага 18 находится в зацеплении с дальним концом держателя 17 рычага идентично п.1 формулы изобретения. В это время заблокированный ползун 31 будет деблокирован средством деблокирования 33 и ползун 31 будет опущен, так что, по меньшей мере, собственный вес ползуна 31 будет действовать на ближний конец держателя 17 рычага. Однако, поскольку сила трения между дальним концом соединительного рычага 18 и дальним концом держателя 17 рычага значительно больше, чем собственный вес ползуна 31, дальний конец соединительного рычага 18 не будет отделен от дальнего конца держателя 17 рычага, даже когда собственный вес ползуна 31 действует на ближний конец держателя 17 рычага. Далее, когда тяжелый груз 14 опущен в заданном месте, напряжение со стропа 13 будет снято и сила, действующая на дальний конец соединительного рычага 18, будет устранена, поэтому ближний конец держателя 17 рычага смещается вниз, по меньшей мере, под действием собственного веса ползуна 31. Таким образом, дальний конец держателя 17 рычага будет поднят и дальний конец соединительного рычага 18 будет отсоединен от держателя 17 рычага, при этом дальний конец соединительного рычага 18 будет повернут вниз. В этом состоянии, когда основание 16 поднято краном 26, другой конец стропа 13 отсоединяется от соединительного рычага 18, после чего строп 13 отсоединяется от тяжелого груза 14, поэтому строп 13 будет поднят совместно с основанием 16.
Как показано на фиг.1 и 4, изобретение по п.3 формулы изобретения согласно п.5 формулы изобретения отличается тем, что:
блокирующее средство 32 содержит регулируемый брус 34, имеющий удлиненное зацепное отверстие 34а, через которое ползун 31 установлен с возможностью перемещения по вертикали, при этом регулируемый брус 34 установлен на основании 16 с возможностью поворота в вертикальной плоскости и с возможностью скольжения в продольном направлении самого регулируемого бруса 34 в установленном состоянии;
ползун 31 выполнен таким образом, чтобы он входил в зацепление с краями удлиненного зацепного отверстия 34а, когда регулируемый брус 34 установлен под заданным углом наклона;
средство деблокирования 33 содержит плечо 36, которое шарнирно подсоединено к основанию 16, так чтобы соприкасаться с регулируемым брусом 34, и которое предназначено для перемещения регулируемого бруса 34 в направлении отсоединения ползуна 31 от регулируемого бруса 34.
В демонтажном устройстве для стропа, предназначенного для подъема тяжелого груза, которое раскрыто в п.5 формулы изобретения, когда ползун 31 поднят, этот ползун 31 будет временно блокирован регулируемым брусом 34 в его поднятом положении, при этом временно заблокированный ползун 31 будет быстро деблокирован, когда регулируемый брус 34 перемещается в заданном направлении посредством поворота плеча 36. В результате предотвращается отсоединение дальнего конца соединительного рычага 18 от дальнего конца держателя 17 рычага, когда поднят тяжелый груз 14, и строп 13 может быть легко и быстро демонтирован с тяжелого груза 14, когда груз 14 опущен в заданном месте.
Как показано на фиг.1, 4 и 10, изобретение по п.3 формулы изобретения согласно п.6 формулы изобретения отличается тем, что:
блокирующее средство 32 содержит первый магнит 41, предназначенный для удерживания ползуна 31 в поднятом положении посредством магнитной силы и для высвобождения ползуна 31 посредством устранения магнитной силы;
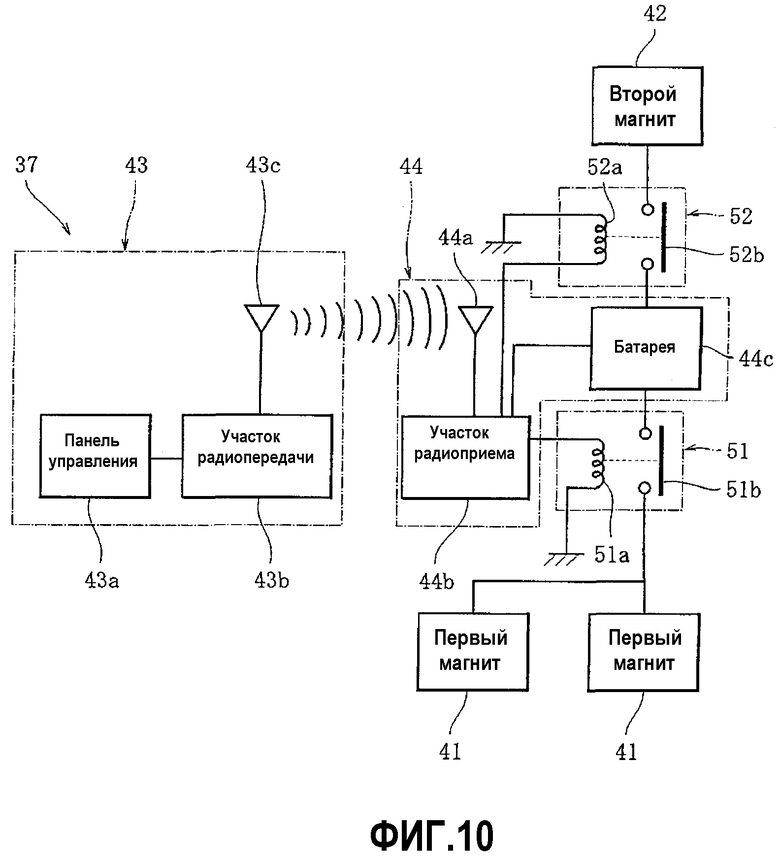
средство деблокирования 33 содержит первое средство переключения 51 для создания или устранения магнитной силы первого магнита 41 и средство 37 дистанционного управления для дистанционного управления первым средством переключения 51, чтобы таким образом управлять первым магнитом 41.
В демонтажном устройстве для стропа, предназначенного для подъема тяжелого груза, которое раскрыто в п.6 формулы изобретения, когда ползун 31 поднят, то он в поднятом состоянии будет временно заблокирован магнитной силой первого магнита 41. В результате предотвращается отсоединение дальнего конца соединительного рычага 18 от дальнего конца держателя 17 рычага, когда поднят тяжелый груз 14. Посредством дистанционного управления первым средством переключения 51 с помощью дистанционного средства управления 37, чтобы таким образом устранить магнитную силу, создаваемую первым магнитом 41 после подъема тяжелого груза 14 краном 26 и его опускания в месте, находящемся на удалении, временно заблокированный ползун 31 будет освобожден. В результате ползун 31 опускается и дальний конец соединительного рычага 18 отсоединяется от дальнего конца держателя 17 рычага, обеспечивая при этом возможность быстрого демонтажа стропа 13 с тяжелого груза 14.
Как показано на фиг.1 и 4, изобретение по п.5 формулы изобретения согласно п.7 формулы изобретения отличается тем, что демонтажное устройство дополнительно содержит: второй магнит 42, который выполнен с возможностью удержания плеча 36 посредством магнитной силы в состоянии, в котором с регулируемым брусом 34 находится в зацеплении ползун 31; упругое тело 61, выполненное так, чтобы поджимать плечо 36 в направлении отсоединения ползуна 31 от регулируемого бруса 34; второе средство переключения 52 для создания или устранения магнитной силы второго магнита 42; дистанционное средство управления 37 для дистанционного управления вторым средством переключения 52, чтобы таким образом управлять вторым магнитом 42.
В демонтажном устройстве для стропа, предназначенного для подъема тяжелого груза, которое раскрыто в п.7 формулы изобретения, когда ползун 31 поднимают при притягивании плеча 36 посредством магнитной силы второго магнита 42, ползун 31 будет поднят с сохранением состояния, при котором регулируемый брус 34 находится в зацеплении с ползуном 31, так что ползун 31 в самом верхнем положении будет временно заблокирован посредством регулируемого бруса 34. Между тем, посредством дистанционного управления вторым средством переключения 52 с помощью дистанционного средства управления 37, чтобы таким образом устранить магнитную силу, создаваемую вторым магнитом 42, плечо 36 поворачивается посредством силы упругости упругого тела 61, так что регулируемый брус 34 перемещается в заданном направлении, чтобы таким образом отсоединить ползун 31 от регулируемого бруса 34. В результате ползун 31 быстро опускается.
Как показано на фиг.1, изобретение по п.1 формулы изобретения согласно п.8 формулы изобретения отличается тем, что демонтажное устройство дополнительно содержит рукоятку 48, которая выступает от дальнего конца держателя 17 рычага и которая может быть захвачена рабочим.
В демонтажном устройстве для стропа, предназначенного для подъема тяжелого груза, которое раскрыто в п.8 формулы изобретения, посредством опускания дальнего конца держателя 17 рычага при захвате рукоятки 48 ползун 31, с которым входит в зацепление ближний конец держателя 17 рычага, будет поднят и дальний конец соединительного рычага 18 может войти в зацепление с дальним концом держателя 17 рычага.
Сущность изобретения поясняется на чертежах, где:
На фиг.1 представлен вид в поперечном сечении демонтажного устройства для стропа, предназначенного для подъема тяжелого груза, которое выполнено согласно первому варианту осуществления настоящего изобретения, при этом вид взят по линии А-А на фиг.9.
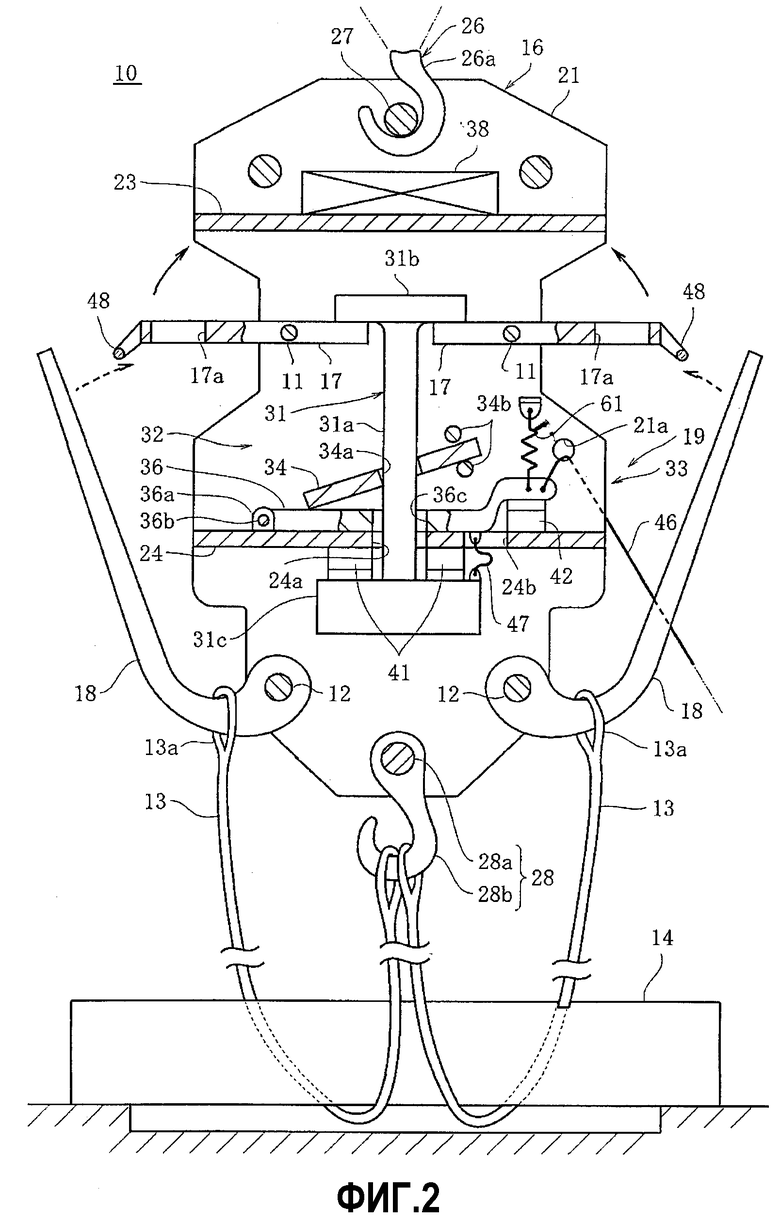
На фиг.2 представлен вид в поперечном сечении, соответствующий фиг.1 и демонстрирующий положение, при котором стропы пропускают вокруг бетонной колонны, после чего кольца стропов устанавливают на соединительные рычаги, при этом дальние концы соединительных рычагов повернуты в наружном направлении.
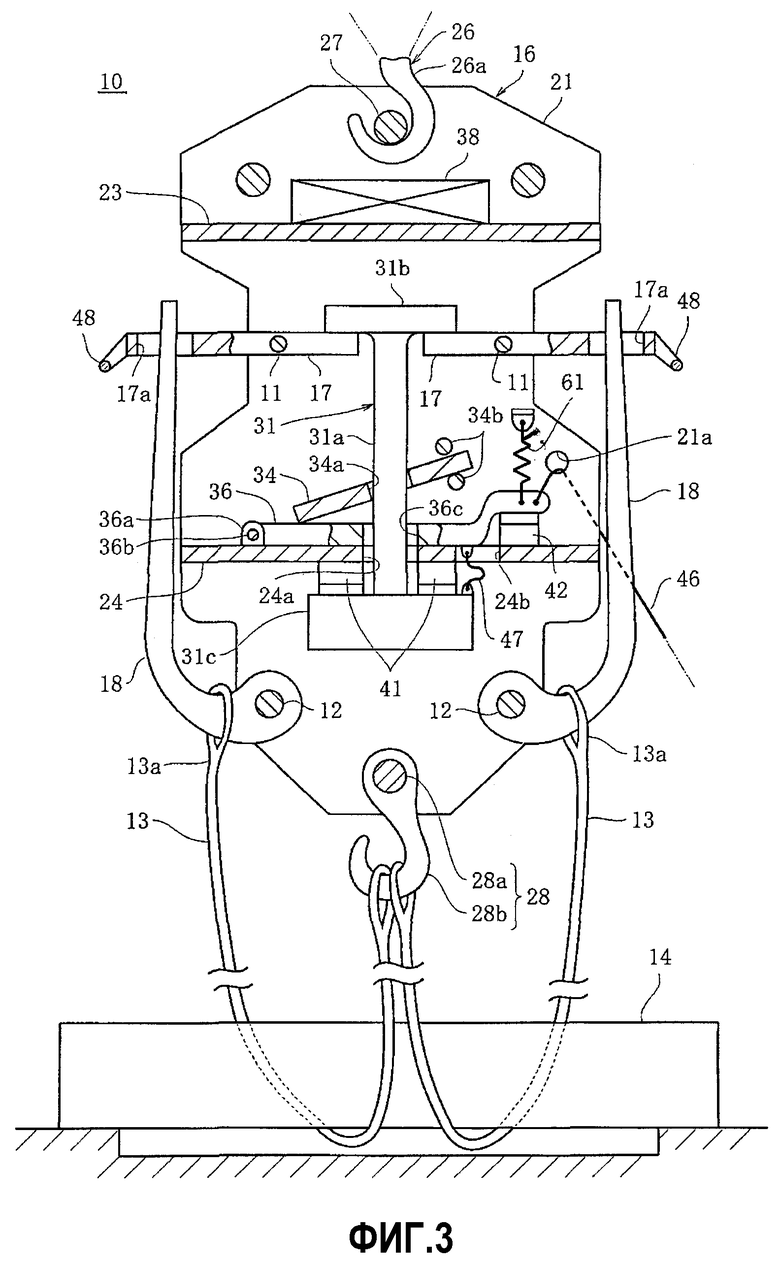
На фиг.3 представлен вид в поперечном сечении, соответствующий фиг.1 и демонстрирующий положение, при котором дальние концы соединительных рычагов находятся в зацеплении соответственно с дальними концами держателей рычагов.
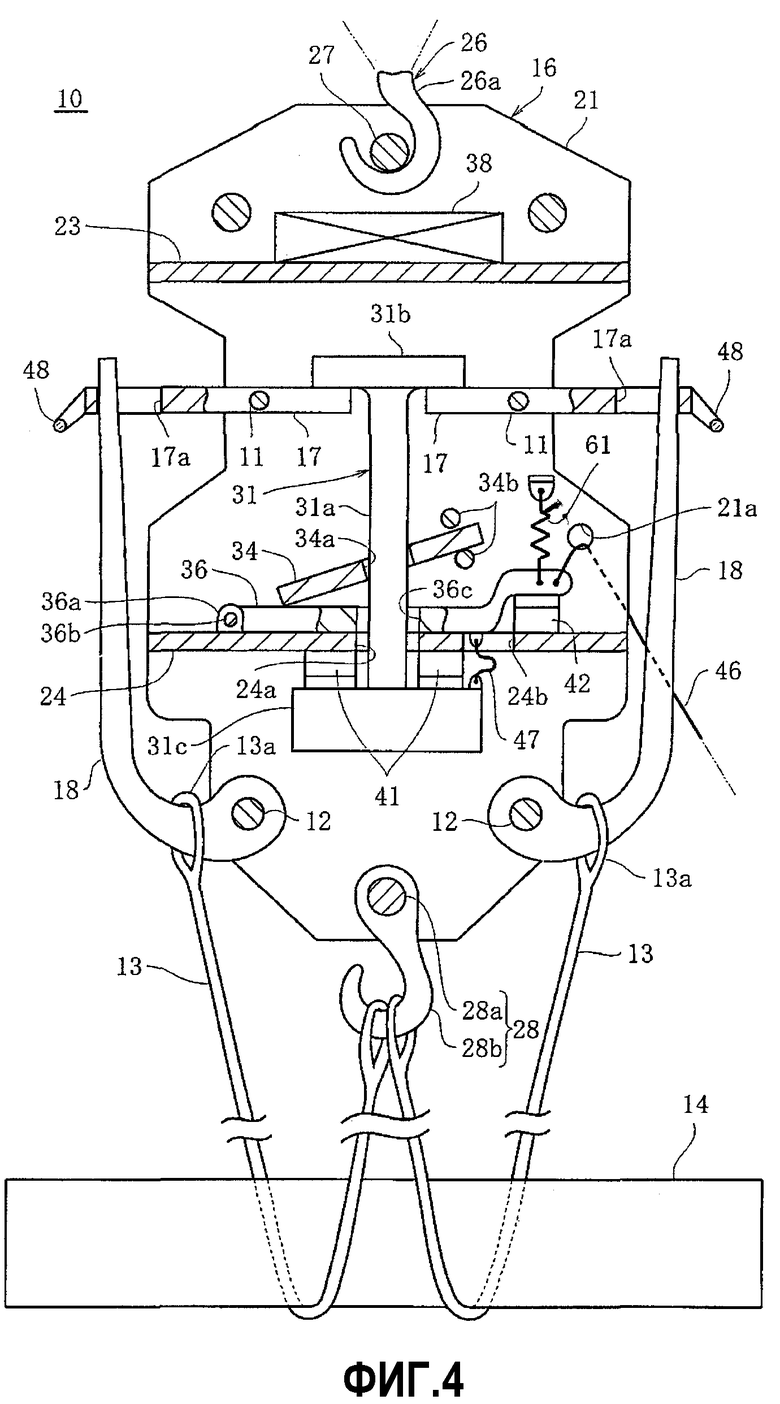
На фиг.4 представлен вид в поперечном сечении, соответствующий фиг.1 и демонстрирующий положение, когда бетонная колонна поднята.
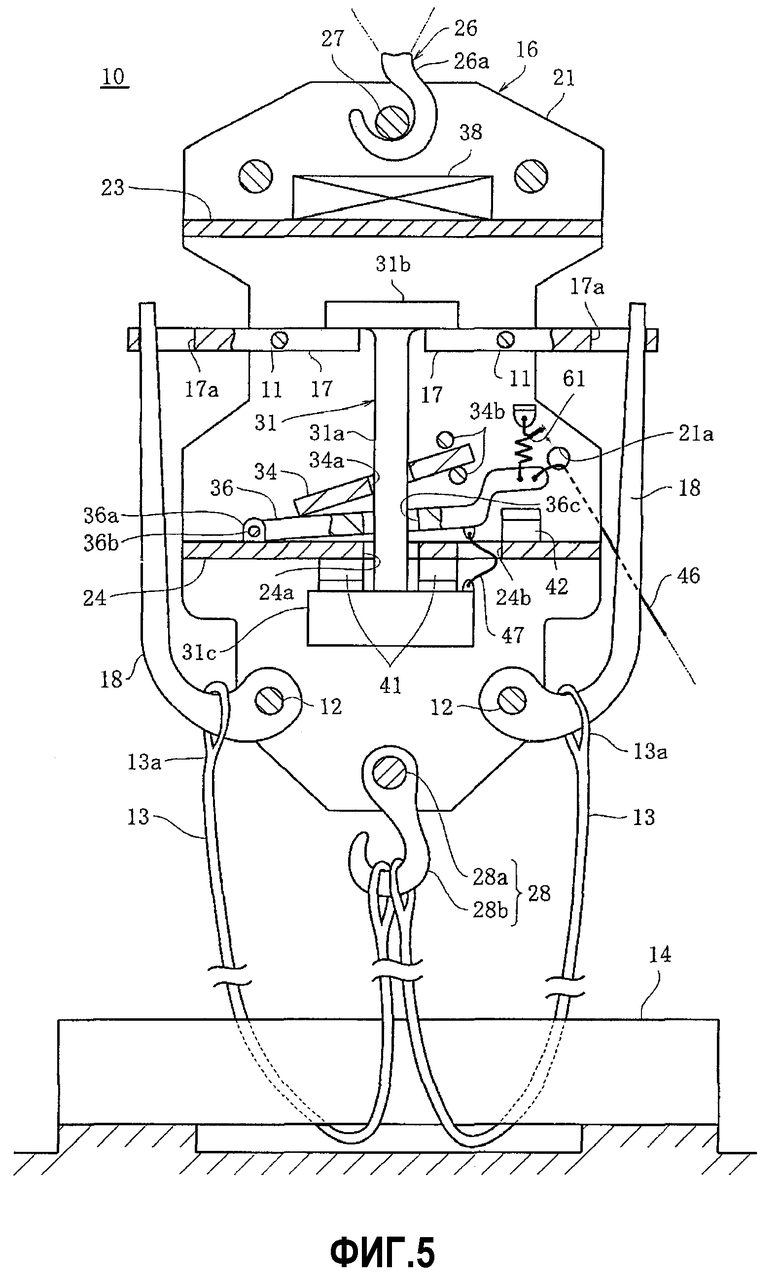
На фиг.5 представлен вид в поперечном сечении, соответствующий фиг.1 и демонстрирующий положение, при котором ползун отсоединен от регулируемого бруса посредством упругого тела, когда бетонная колонна опущена в заданном месте и устранена магнитная сила, создаваемая вторым магнитом.
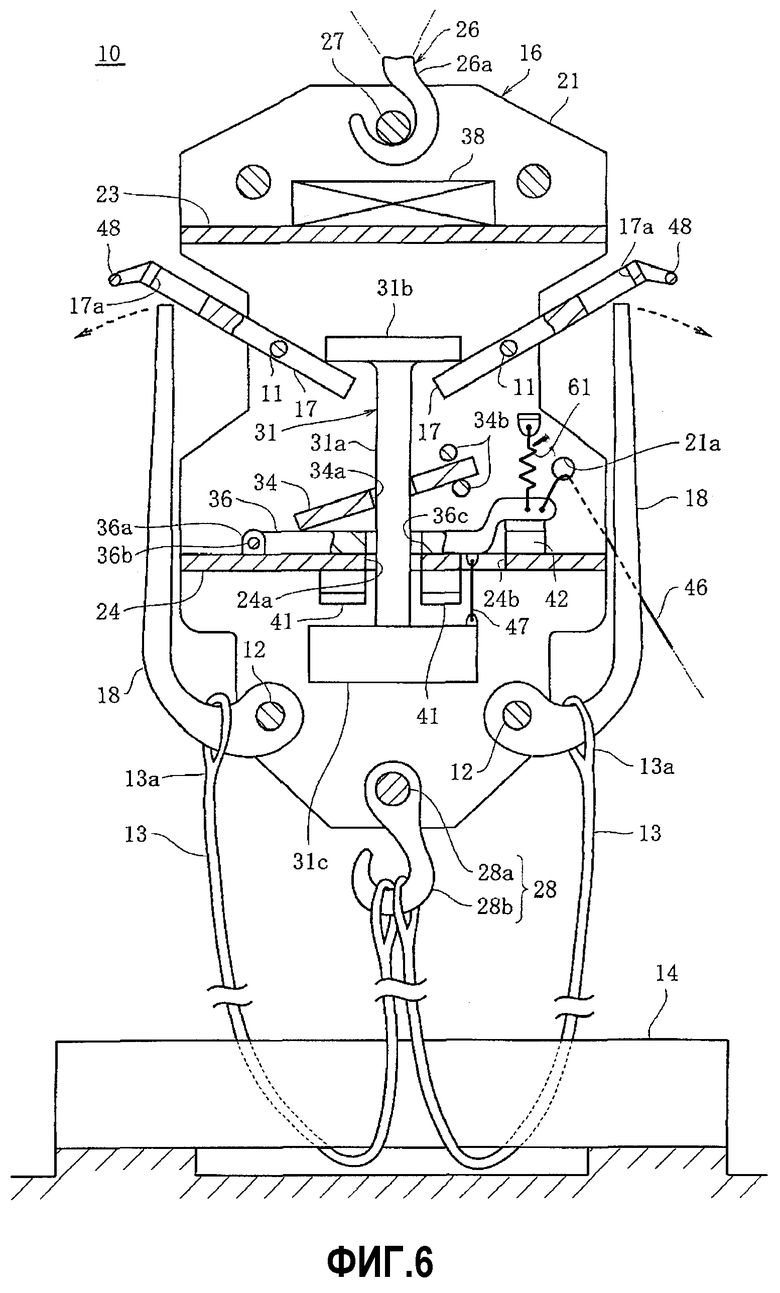
На фиг.6 представлен вид в поперечном сечении, соответствующий фиг.1 и демонстрирующий положение, при котором дальние концы держателей рычагов подняты так, что дальние концы соединительных рычагов будут отсоединены от дальних концов держателей рычагов, когда ползун перемещен вниз путем устранения магнитной силы, создаваемой первым магнитом.
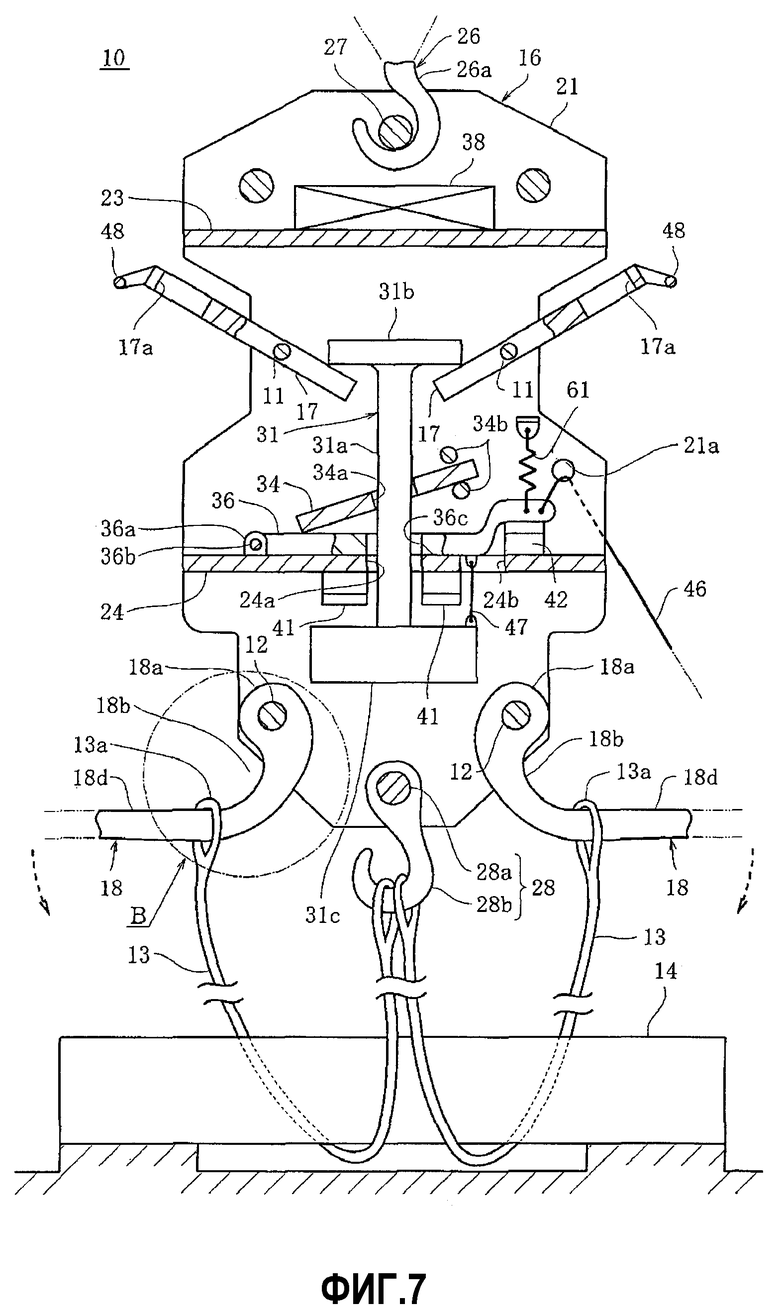
На фиг.7 представлен вид в поперечном сечении, соответствующий фиг.1 и демонстрирующий положение, при котором дальние концы соединительных рычагов отсоединены от дальних концов держателей рычагов, так что соединительные рычаги будут повернуты в нижнем направлении.
На фиг.8 представлен увеличенный вид зоны В на фиг.7.
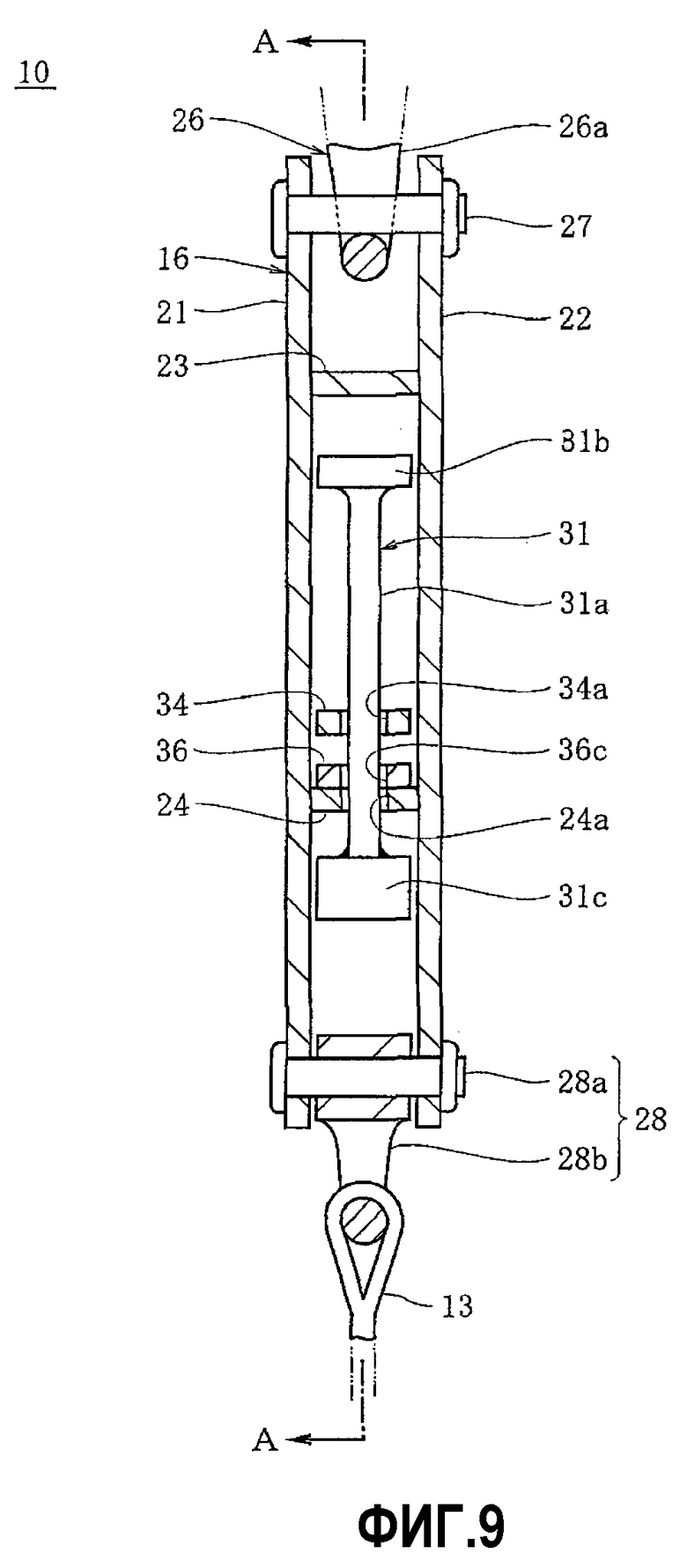
На фиг.9 представлен вид в поперечном сечении по линии С-С на фиг.1.
На фиг.10 представлен вид построения дистанционного средства управления, предназначенного для дистанционного управления первыми магнитами и вторым магнитом.
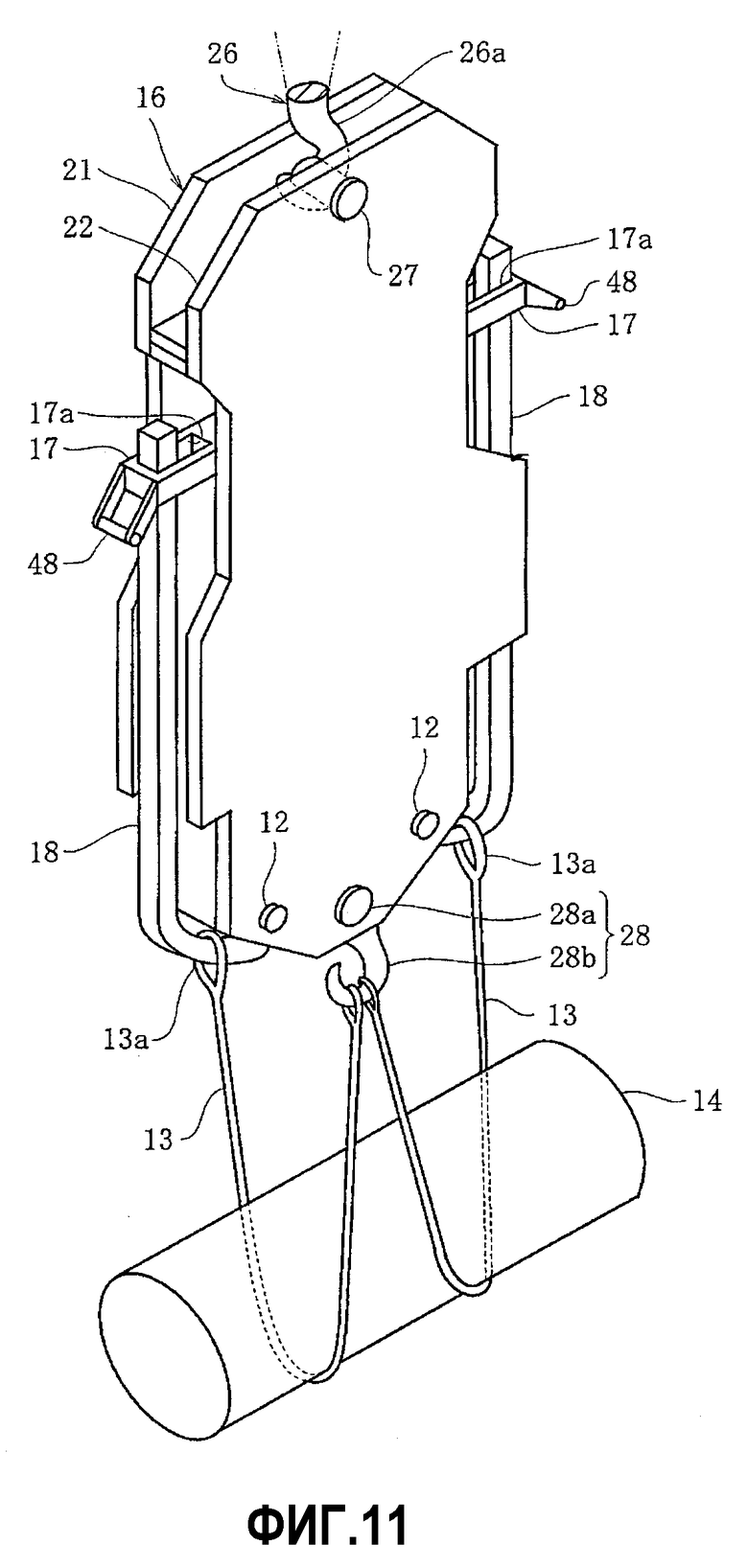
На фиг.11 представлен вид в перспективе ситуации, при которой бетонная колонна поднята подъемным устройством.
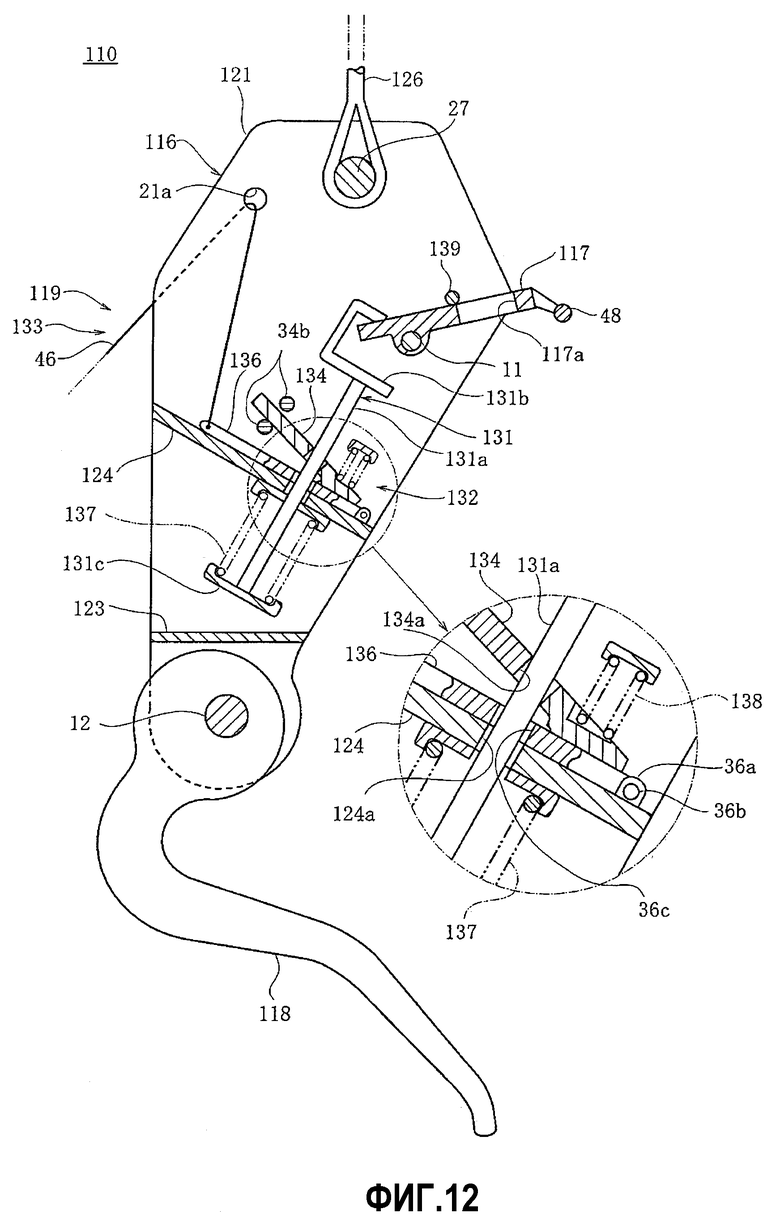
На фиг.12 представлен вид в поперечном сечении, соответствующий фиг.1 и демонстрирующий демонтажное устройство для стропа, предназначенного для подъема тяжелого груза, которое выполнено в соответствии со вторым вариантом осуществления настоящего изобретения.
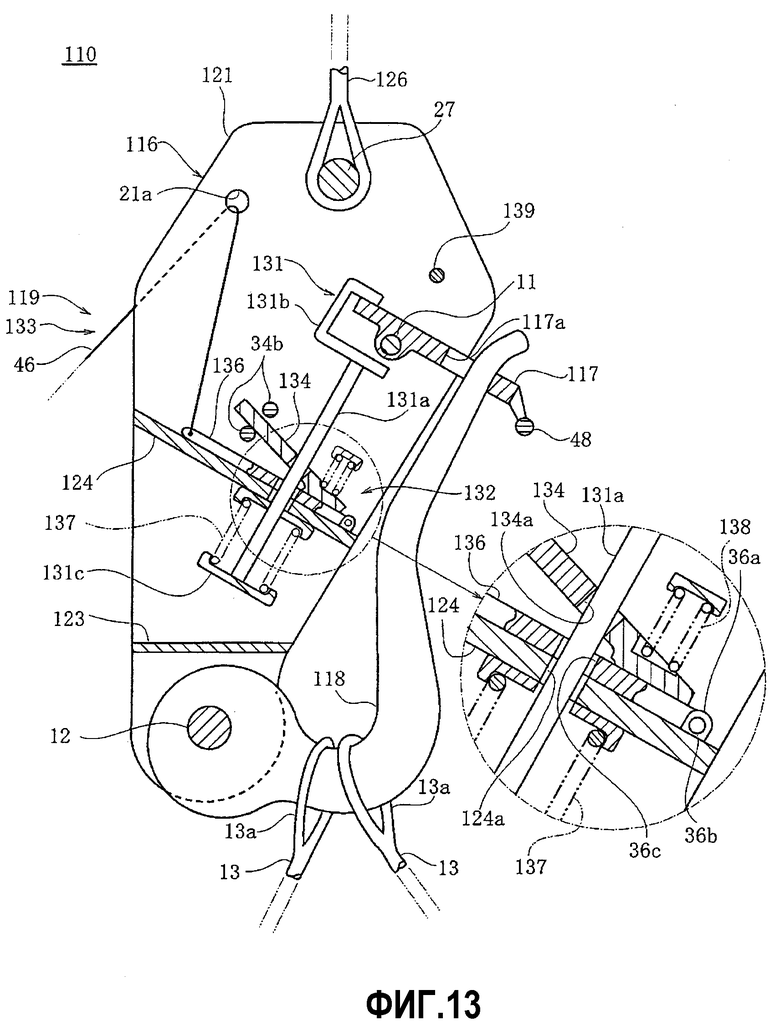
На фиг.13 представлен вид в поперечном сечении, соответствующий виду на фиг.12 и демонстрирующий положение, при котором кольца стропов закреплены на соединительном рычаге, а дальний конец соединительного рычага находится в зацеплении с дальним концом держателя рычага.
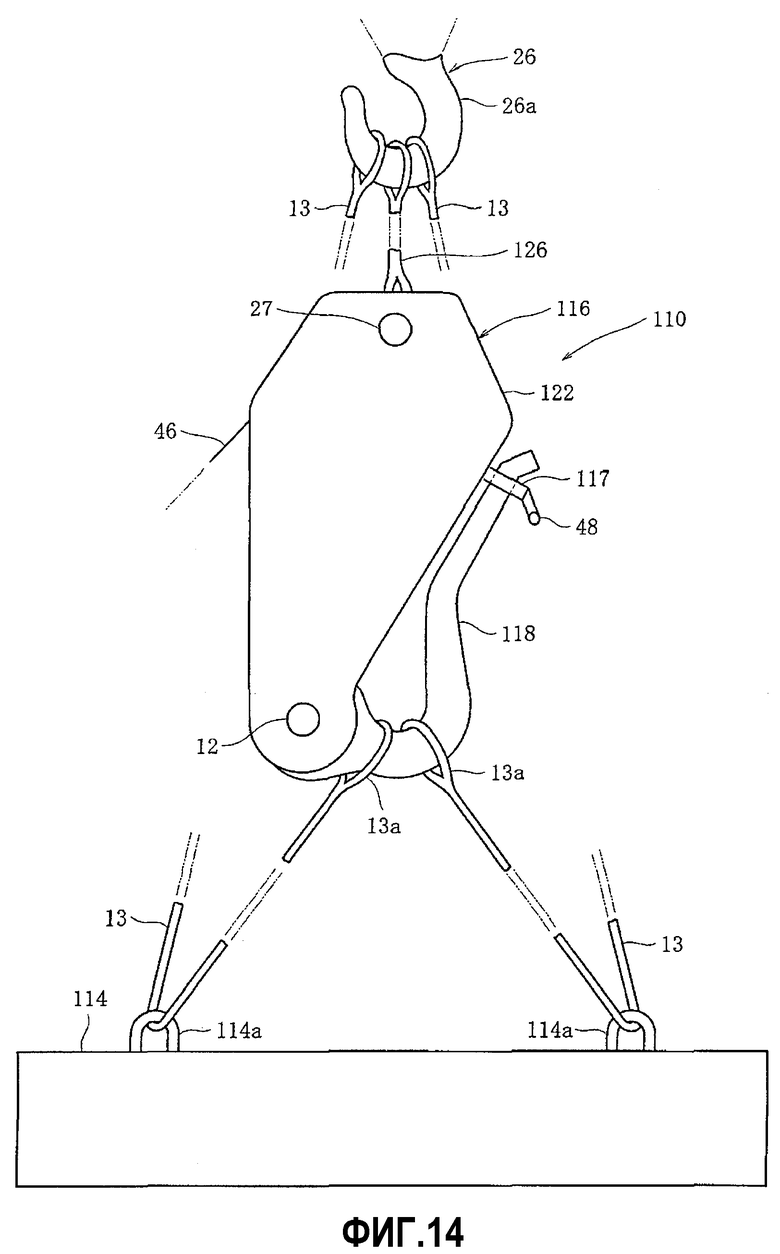
На фиг.14 представлен вид спереди демонтажного устройства в положении, при котором посредством демонтажного устройства поднят бетонный блок.
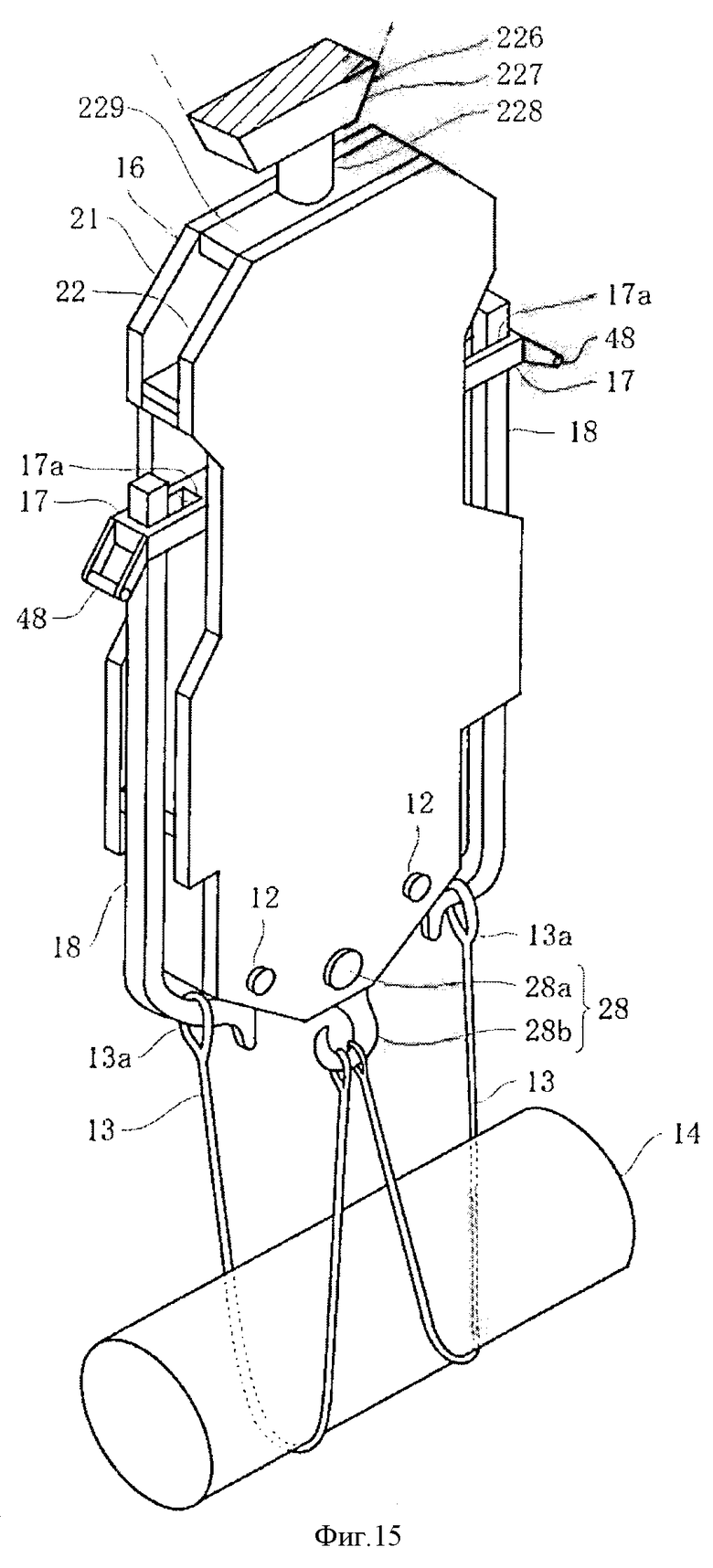
На фиг.15 представлен вид в перспективе, соответствующий фиг.11 и демонстрирующий третий вариант осуществления настоящего изобретения.
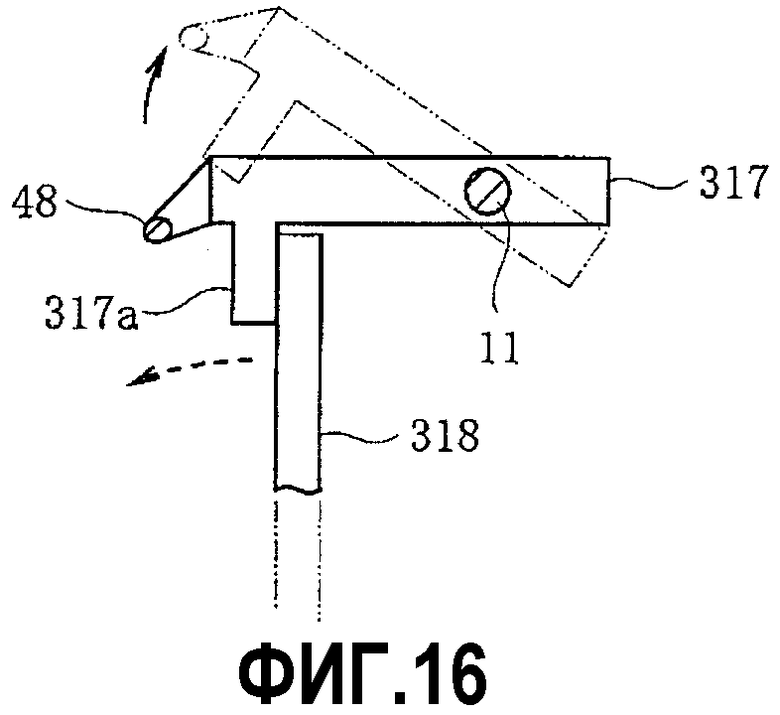
На фиг.16 представлен вид в поперечном сечении важной части четвертого варианта осуществления настоящего изобретения, демонстрирующий состояние, при котором дальний конец соединительного рычага находится в зацеплении с дальним концом держателя рычага.
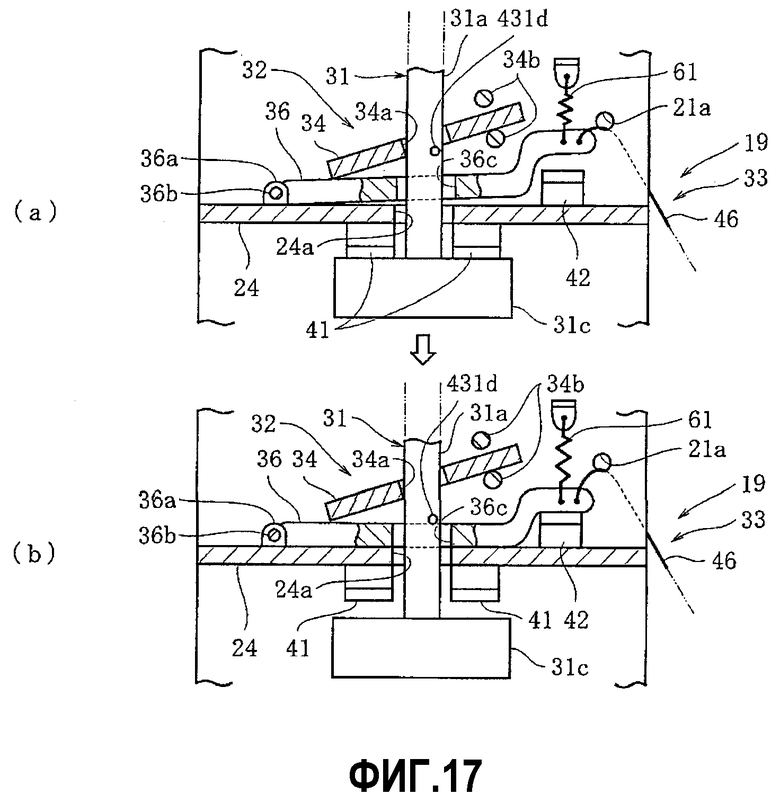
На фиг.17 представлен вид в поперечном сечении важных частей пятого варианта осуществления настоящего изобретения, демонстрирующий состояние, при котором ползун опущен и зацепной палец толкает плечо вниз, так что дальний конец плеча приведен в контакт со вторым магнитом.
Далее на основе фигур будет разъяснен первый вариант осуществления настоящего изобретения.
Как показано на фиг.1 и 4, позицией 10 обозначено демонтажное устройство для стропов 13, предназначенных для подъема тяжелого груза 14, при этом демонтажное устройство 10 содержит: основание 16, пару держателей 17,17 рычагов, шарнирно подсоединенных по существу по их центру к паре первых валов соответственно 11,11, прикрепленных к основанию; пару соединительных рычагов 18,18, имеющих ближние концы, с возможностью поворота соответственно установленных на паре вторых валов 12,12, прикрепленных к основанию 16; средство отсоединения 19 для отсоединения дальних концов соединительных рычагов соответственно от дальних концов держателей 17 рычагов. В этом варианте осуществления конструкции тяжелый груз 14 представляет собой бетонную колонну. Кроме того, строп 13 в настоящем описании концептуально содержит в себе трос из волокна, выполненного из смолы, например, трос из нейлона, стренгу, цепь, в дополнение к проволочному тросу.
Основание 16 включает в себя первую и вторую пластины 21, 22, образованные посредством соответствующего резания стальной пластины с приданием по существу прямоугольной формы, а также верхнюю пластину 23 и фиксирующую пластину 24, установленные таким образом, чтобы они проходили в горизонтальном направлении соответственно в верхних частях и в центральных частях первой и второй пластин и между ними, так чтобы соединить друг с другом первую и вторую пластины с обеспечением заданного промежутка (фиг.1 и 9). В центральной части верхнего конца основания 16 расположена часть 27 для зацепления краном, предназначенная для зацепления крюком 26а крана 26, а в центральной части нижнего конца основания 16 расположена часть 28 для подвешивания стропов, на которой подвешены одни из концов стропов 13, находящихся в зацеплении с бетонной колонной 14. Часть 28 для подвешивания стропа включает в себя первый палец 28а, прикрепленный к основанию 16, и крюк 28b для стропа, имеющий верхний конец, свободно установленный на первый палец, и нижний конец, на который подвешены концы стропов 13. Часть 27 для зацепления краном и первый палец 28а образованы из столбообразного стального материала. Кроме того, в центральной части фиксирующей пластины 24 образовано сквозное отверстие 24а.
Парные первые валы 11,11 прикреплены к основанию 16 с обеспечением заданного промежутка в горизонтальном направлении между верхней пластиной 23 и фиксирующей пластиной 24 (фиг.1). Далее, парные держатели 17,17 рычагов шарнирно подсоединены к первым валам 11,11, так что дальние концевые стороны держателей рычагов тяжелее, чем их ближние концевые стороны, то есть в ненагруженном состоянии дальние концы опущены. Конкретно говоря, парные держатели 17,17 рычагов выполнены таким образом, что их части, более близкие к ближним концам от центральных частей в продольном направлении держателей рычагов, с возможностью поворота соответствующим образом установлены на парных первых валах 11,11, и так, что дальние концы держателей 17,17 рычагов выступают в левом наружном направлении и в правом наружном направлении соответственно от первой и второй пластин 21, 22. Кроме того, дальние концы парных держателей 17,17 рычагов образованы с удлиненными входными отверстиями 17а,17а, соответственно проходящими в продольном направлении держателей рычагов (фиг.1, 9 и 11).
Парные вторые валы 12,12 прикреплены к основанию 16 вблизи от части 28 для подвешивания стропов с обеспечением заданного промежутка между ними в горизонтальном направлении (фиг.1). Парные соединительные рычаги 18,18 сформированы соответствующим образом с приданием им по существу J-образной конфигурации, при этом они выполнены так, что дальние концы соединительных рычагов 18,18 входят в зацепление соответственно с дальними концами парных держателей 17,17 рычагов посредством поворота в верхнем направлении дальних концов соединительных рычагов 18,18 и введения этих дальних концов в удлиненные входные отверстия 17а,17а соответственно на дальних концах парных держателей 17,17 рычагов (фиг.3 и 4). Кроме того, соединительные рычаги 18 выполнены таким образом, что обеспечена возможность соответствующей установки колец 13а, образованных на других концах стропов 13, на соединительные рычаги 18.
Средство отсоединения 19 содержит ползун 31, установленный на основании 16 с возможностью перемещения в вертикальном направлении, блокирующее средство 32, выполненное с возможностью вхождения в зацепление с ползуном для временного блокирования ползуна в поднятом положении, и средство деблокирования 33 для деблокирования временно заблокированного ползуна. Ползун 31 включает в себя поднимающийся/опускающийся шток 31а, свободно вставленный через сквозное отверстие 24а фиксирующей пластины 24, зацепную пластину 31b, проходящую в горизонтальном направлении, которая выполнена за одно целое в верхней части поднимающегося/опускающегося штока, и груз 31с, прикрепленный к нижнему концу поднимающегося/опускающегося штока (фиг.1 и 9). Зацепная пластина 31b выполнена с возможностью вхождения в зацепление с ближними концами парных держателей 17,17 рычагов для сталкивания вниз этих ближних концов, когда ползун 31 опущен (фиг.7).
Блокирующее средство 32 содержит регулируемый брус 34, имеющий удлиненное зацепное отверстие 34а, через которое ползун 31 может перемещаться в вертикальном направлении и может быть свободно установлен, и пару первых магнитов 41,41, выполненных таким образом, чтобы удерживать ползун 31 посредством магнитных сил в состоянии, при котором ползун 31 поднят (фиг.1 и 9). Регулируемый брус 34 выполнен в виде плоского бруса и установлен на основании 16 так, чтобы этот регулируемый брус 34 имел возможность поворота в вертикальной плоскости и возможность скольжения в его продольном направлении в состоянии, при котором регулируемый брус свободно установлен на поднимающийся/опускающийся шток 31а. Кроме того, в центре регулируемого бруса 34 образовано удлиненное зацепное отверстие 34а, при этом его длина немного больше ширины поднимающегося/опускающегося штока 31а. Регулируемый брус 34 включает в себя один конец, который должен быть расположен на плече 36, описанном далее, вблизи от ближнего конца плеча, либо который удерживается в состоянии незначительного отхода от плеча, и другой конец, с возможностью перемещения вставленный между парой вторых пальцев 34b,34b, прикрепленных к основанию 16 над фиксирующей пластиной 24. Поднимающийся/опускающийся шток 31а выполнен с возможностью вхождения в зацепление с краями удлиненного зацепного отверстия 34а, когда регулируемый брус 34 наклонен под заданным углом. А именно, поднимающийся/опускающийся шток 31а выполнен так, чтобы он был временно заблокирован в состоянии, в котором этот шток поднят, когда регулируемый брус 34 повернут вокруг нижнего второго пальца 34b и перемещен в его продольном направлении, так что края поднимающегося/опускающегося штока 31а со стороны ширины входят в зацепление соответственно с обоими краями удлиненного зацепного отверстия 34а. Кроме того, парный первый магнит 41,41 выполнен с электромагнитами, которые соответствующим образом создают и устраняют магнитные силы соответственно при их возбуждении и снятии возбуждения и которые прикреплены к нижней поверхности фиксирующей пластины 24 противоположно грузу 31с.
Средство деблокирования 33 содержит плечо 36, предназначенное для перемещения регулируемого бруса 34 в направлении отсоединения ползуна 31 от регулируемого бруса 34, первое средство переключения 51 для создания и устранения магнитных сил первых магнитов 41 и дистанционное средство управления 37 для дистанционного управления первым средством переключения, чтобы таким образом управлять первыми магнитами 41 (фиг.1, 9 и 10). Ближний конец плеча 36 с возможностью поворота установлен на третьем пальце 36b первого кронштейна 36а, установленного на фиксирующей пластине 24, так что плечо 36 расположено в состоянии опирания на фиксирующую пластину 24 (фиг.1). Плечо 36 выполнено со сквозным отверстием 36с по его центру, через которое свободно вводят поднимающийся/опускающийся шток 31а. Первое средство переключения 51 представляет собой электромагнитное реле, включающее в себя обмоточную часть 51а и переключающую часть 51b (фиг.10). Когда обмоточная часть 51а первого переключающего средства 51 возбуждена, переключающая часть 51b будет замкнута для обеспечения прохождения электрического тока через первые магниты 41 и таким образом создания магнитных сил. Когда с обмоточной части 51а первого переключающего средства 51 возбуждение снято, переключающая часть 51b будет разомкнута и электрический ток не будет проходить через первые магниты 41, так что магнитные силы первых магнитов будут устранены. Следует заметить, что первое средство переключения 51 размещено внутри коробки 38 (фиг.1), расположенной на верхней пластине 23.
Дистанционное средство управления 37 содержит передатчик 43, установленный на расстоянии от основания 16, и приемник 44, размещенный внутри коробки 38 (фиг.1 и 10). Передатчик 43 включает в себя панель управления 43а, участок 43b радиопередачи, подсоединенный к панели управления, и передающую антенну 43с, подсоединенную к выходу участка радиопередачи. Приемник 44 включает в себя приемную антенну 44а, участок 44b радиоприема, имеющий вход, подсоединенный к приемной антенне, и батарею 44с. Панель управления 43а снабжена переключателем (не показан), приводимым в действие оператором, а участок 44b радиоприема имеет выход, подсоединенный к обмоточной части 51а первого переключающего средства 51. Кроме того, батарея 44с непосредственно соединена с участком 44b радиоприема, а также соединена с парным первым магнитом 41,41 через переключающую часть 51b первого средства переключения 51.
Фиксирующая пластина 24 несет на себе второй магнит 42, при этом второй магнит имеет верхнюю поверхность, выполненную таким образом, чтобы она была соединена с нижней поверхностью дальнего конца плеча 36, изогнутого в форме кривошипа (фиг.1). Второй магнит 42 включает в себя постоянный магнит и электромагнит (оба не показаны) и выполнен таким образом, что плечо 36 удерживается магнитной силой постоянного магнита, когда с электромагнита снято возбуждение, при этом магнитная сила постоянного магнита сводится к нулю посредством магнитной силы электромагнита, когда электромагнит возбужден. Кроме того, электромагнит второго магнита 42 соединен с батареей 44с через переключающую часть 52b второго средства переключения 52 (фиг.10). Второе средство переключения 52 представляет собой электромагнитное реле, имеющее обмоточную часть 52а и переключающую часть 52b, при этом обмоточная часть 52а подсоединена к выходу участка 44b радиоприема. А именно, второе средство переключения 52 выполнено таким образом, чтобы им можно было дистанционно управлять средством 37 дистанционного управления. Второе средство переключения 52 выполнено так, что когда обмоточная часть 52а второго переключающего средства 52 возбуждена, переключающая часть 52b будет включена, чтобы вызвать прохождение электрического тока через электромагнит второго магнита 42, так что магнитные силы постоянного магнита и электромагнита второго магнита будут сведены к нулю посредством друг друга, чтобы таким образом освободить плечо 36. Между тем, второе средство переключения 52 выполнено таким образом, что когда обмоточная часть 52а второго средства переключения 52 возбуждена, переключающая часть 52b будет выключена и электрический ток не будет проходить через электромагнит второго магнита 42, поэтому плечо 36 удерживается магнитной силой второго магнита. Следует заметить, что второе средство переключения 52 размещено внутри коробки 38 (фиг.1).
Между частью плеча 36 вблизи от его дальнего конца и первой пластиной 21 натянуто упругое тело 61 (фиг.1), выполненное с возможностью обеспечения смещения плеча 36 в направлении отсоединения ползуна 31 от регулируемого бруса 34, когда прекращено действие магнитной силы второго магнита 42. В этом варианте осуществления конструкции упругое тело 61 представляет собой работающую на растяжение спиральную пружину. Кроме того, первая пластина 21 выполнена со сквозным отверстием 21а, расположенным выше дальнего конца плеча 36, при этом дальний конец плеча 36 имеет прикрепленный к нему рабочий трос 46. Этот трос 46 пропускают через сквозное отверстие 21а, размещают снаружи основания 16 и используют для деблокирования ползуна 31 по отношению к регулируемому брусу 34 при аварии путем натягивания троса 46 в случае такой неисправности как поломка упругого тела 61 или линейного элемента 47, который будет описан далее. Следует заметить, что упругое тело 61 может представлять собой работающую на сжатие пружину или резину.
Груз 31с ползуна 31 и плечо 36 подсоединены друг к другу посредством линейного элемента 47, обладающего упругостью (фиг.1 и 6). Линейный элемент 47 в этом варианте осуществления выполнен из сплава, запоминающего форму, при этом он линейно растянут, когда на оба конца этого элемента действует натяжение (фиг.6), и удерживается в виде выступающей вбок U-образной формы, когда действие натяжения на оба его конца прекращается (фиг.1). Кроме того, линейный элемент 47 проходит через сквозное отверстие 24b, выполненное в фиксирующей пластине 24, при этом линейный элемент 47 имеет такую длину, что плечо 36 входит в соприкосновение с верхней поверхностью второго магнита 42, когда ползун 31 опущен по существу в его самое нижнее положение (фиг.6). Следует заметить, что держатели 17 рычагов имеют дальние концевые поверхности, снабженные соответствующим образом выступающими рукоятками 48, которые могут быть захвачены рабочим (фиг.1).
Между тем, как подробно показано на фиг.1, 7 и 8, каждый из соединительных рычагов 18 включает в себя ближнюю концевую часть 18а, с возможностью поворота установленную на действующем совместно с ней втором валу 12, криволинейную часть 18b, выполненную так, что она непрерывно проходит к ближней концевой части и изогнута по заданному радиусу кривизны, дальнюю концевую часть 18с, входящую в зацепление с дальним концом действующего совместно с ней держателя 17 рычага, и балочную часть 18d, соединяющую друг с другом криволинейную часть 18b и дальнюю концевую часть 18с. Следует заметить, что на фиг.8 показаны предельная точка действия Р и точка G, которая представляет собой центр тяжести соединительного рычага 18. Предельная точка действия Р представляет собой положение, в котором другой конец применяемого стропа 13 входит в соприкосновение с действующим совместно с ним соединительным рычагом 18, когда соединительный рычаг 18 повернут вокруг действующего совместно с ним вала 12, так что соединенная с ним балочная часть 18d будет переведена из вертикального положения в горизонтальное положение посредством отсоединения соединительного рычага от действующего совместно с ним держателя 17 рычага или путем подъема основания после отсоединения соединительного рычага от держателя рычага из состояния, при котором другой конец применяемого стропа 13, входящего в зацепление с тяжелым грузом 14, подвешен на действующем совместно с ним соединительном рычаге, а дальний конец соединительного рычага 18 находится в зацеплении с дальним концом действующего совместно с ним держателя 17 рычага.
Далее будет разъяснена работа демонтажного устройства 10 для стропа, которое выполнено так, как указано выше.
Во-первых, крюк 26а крана 26 вводят в зацепление с частью 27, предназначенной для зацепления крюком, а одни концы стропов 13 подвешивают на крюк 28b части 28, служащей для подвешивания стропов. Далее переключатель (не показан) панели управления 43а передатчика 43 дистанционного средства управления 37 приводят в действие для включения переключающей части 51b первого средства переключения 51, чтобы таким образом выключить переключающую часть 52b второго средства переключения 52. В этом состоянии основание 16 расположено как раз над бетонной колонной 14. В это время дальние концы соединительных рычагов 18 будут соответствующим образом расположены ниже их ближних концов, а на дальних концах держателей 17 рычагов будут захвачены рукоятки 48 и дальние концы держателей 17 рычагов соответствующим образом опускаются, так что ползун 31, находящийся в зацеплении с ближними концами держателей 17 рычагов, поднимается. Кроме того, поскольку поднимающийся/опускающийся шток 31а находится в зацеплении с краями удлиненного зацепного отверстия 34а регулируемого бруса 34 и электрический ток проходит через первые магниты 41, груз 31с удерживается посредством магнитных сил первых магнитов, когда ползун 31 поднят, так что ползун 31 будет временно застопорен в поднятом состоянии и второй магнит 42 удерживает плечо 36 посредством магнитной силы постоянного магнита (фиг.1). Когда оператор выпускает из своей руки рукоятку 48, верхние поверхности ближних концов держателей 17 рычагов примыкают к зацепной пластине 31b таким образом, что держатели рычагов удерживаются по существу в горизонтальном положении посредством соответствующего уравновешивания вокруг первых валов 11.
В этом состоянии стропы 13 пропускают под бетонной колонной 14 и они входят в зацепление с ней, после чего кольца 13а на других концах стропов соответствующим образом крепят на соединительных рычагах 18 и затем соединительные рычаги соответствующим образом поворачивают в верхнем направлении вокруг вторых валов 12 (фиг.2). После этого захватывают рукоятки 48 и дальние концы держателей 17 рычагов поднимают в направлениях стрелок согласно фиг.2, при этом дальние концы соединительных рычагов 18 соответствующим образом вставляют в удлиненные входные отверстия 17а держателей 17 рычагов. Это приводит к зацеплению дальних концов соединительных рычагов 18 соответственно с дальними концами держателей 17 рычагов (фиг.3).
После этого, когда бетонная колонна 14 поднята (фиг.4) краном 26 посредством крюка 26а, основания 16 и стропов 13, вес бетонной колонны 14 будет приложен к соединительным рычагам 18, то есть относительно большие силы, обусловленные крутящим моментом на основе веса бетонной колонны 14, действуют в наружном направлении соответственно на дальние концы соединительных рычагов 18, так что дальние концы соединительных рычагов 18 будут прижаты к внутренним концевым поверхностям соответствующих удлиненных входных отверстий 17а держателей 17 рычагов. При этом происходит увеличение силы трения соответственно между дальними концами соединительных рычагов 18 и дальними концами держателей 17 рычагов, так что дальние концы соединительных рычагов 18 будут приведены в состояние зацепления с дальними концами держателей 17 рычагов.
Когда бетонная колонна 14 опущена в заданном месте (фиг.5), со стропов 13 будет снято напряжение, чтобы таким образом прекратить действие имеющихся относительно больших сил, воздействующих на дальние концы соединительных рычагов 18. В этом состоянии, когда переключающая часть 52b второго средства переключения 52 включена посредством дистанционного воздействия, электрический ток проходит через электромагнит второго магнита 42, так что магнитные силы постоянного магнита и электромагнита второго магнита сводят к нулю действие друг друга для высвобождения плеча 36. Таким образом, плечо 36 поворачивается вверх вокруг третьего пальца 36b посредством силы упругости упругого тела 61 и ближний конец регулируемого бруса 34 поднимается (фиг.5), в результате чего будет разомкнуто зацепление поднимающегося/опускающегося штока 31а с краями удлиненного зацепного отверстия 34а. А именно, ползун 31 отсоединяется от регулируемого бруса 34.
Когда переключающая часть 51b первого средства переключения 51 выключена путем дистанционного воздействия по существу в то же самое время, когда переключающая часть 52b второго средства переключения 52 включена дистанционным воздействием, магнитные силы первых магнитов 41 будут устранены, так что ползун 31 опускается и зацепная пластина 31b толкает вниз ближние концы держателей 17 рычагов (фиг.6). Поэтому линейный элемент 47 растягивается, чтобы тянуть вниз дальний конец плеча 36 и таким образом обеспечить примыкание дальнего конца плеча 36 к верхней поверхности второго магнита 42, так чтобы регулируемый брус 34 входил в зацепление с ползуном 31, в то время как дальние концы держателей 17 рычагов поднимаются таким образом, чтобы была обеспечена возможность удаления дальних концов соединительных рычагов 18 соответственно из удлиненных входных отверстий 17а.
В том случае, когда вес бетонной колонны 14 значительно больше, чем собственный вес соединительных рычагов 18, дальние концы соединительных рычагов 18 поворачиваются вниз соответственно вокруг валов 12, перед тем как основание 16 поднимается посредством крана 26 или когда основание 16 поднято. Когда балочные части 18d перемещены соответственно из вертикального положения в горизонтальное положение (фиг.7), эти балочные части 18d соединительных рычагов 18 поворачиваются далее в направлениях перемещения из горизонтального положения в направленное вниз положение, если достигнут тупой угол α, образуемый между прямой линией L, соединяющей центральную точку каждого второго вала 12 со связанной с ним предельной точкой действия Р, и внутренней линией балочной части 18d, так что кольца 13а стропов 13 будут соответствующим образом удалены с соединительных рычагов 18.
Напротив, в том случае, если вес бетонной колонны 14 относительно невелик, так что собственный вес соединительных рычагов 18 влияет на их крутящие моменты, дальние концы соединительных рычагов 18 поворачиваются вниз соответственно вокруг вторых валов 12, перед тем как основание 16 поднято краном 26 или когда основание 16 поднято. Когда балочные части 18d перемещены соответственно из вертикального положения в горизонтальное положение (фиг.7), балочные части 18d соединительных рычагов 18 поворачиваются далее в направлениях перемещения из горизонтального положения в направленное вниз положение, если достигнут тупой угол β, образуемый между прямой линией М, соединяющей центральную часть каждого второго вала 12 с центром тяжести G действующего совместно с ним соединительного рычага 18, и внутренней линией балочной части 18d, так что кольца 13а стропов 13 соответствующим образом будут удалены с соединительных рычагов 18.
Кроме того, когда основание 16 поднято краном 26, стропы 13 высвобождаются от бетонной колонны 14 и поднимаются совместно с основанием 16. При этом будет обеспечена возможность автоматического демонтажа стропов 13 с бетонной колонны 14, опущенной в заданном месте.
Следует заметить, что переключающую часть 51b выключают посредством дистанционного воздействия как раз после того, когда переключающая часть 52b второго средства переключения 52 будет включена дистанционным воздействием, так что линейный элемент 47 растягивается, когда ползун 31 опускается, чтобы таким образом тянуть в нижнем направлении дальний конец плеча 36, так что дальний конец плеча 36 будет притянут ко второму магниту 42 посредством магнитной силы и регулируемый брус 34 будет находиться в зацеплении с ползуном 31 (фиг.7).
На фиг.12-14 показан второй вариант осуществления конструкции согласно настоящему изобретению. Позиции на фиг.12-14, аналогичные позициям первого варианта конструкции, соответственно обозначают идентичные детали.
В этом варианте осуществления конструкции позицией 110 обозначено демонтажное устройство для стропов 13, которое содержит: основание 116, одиночный держатель 117 рычага, шарнирно подсоединенный по существу к центру одиночного первого вала 11, прикрепленного к основанию; одиночный соединительный рычаг 118, имеющий ближний конец, с возможностью поворота установленный на одиночном втором валу 12, прикрепленном к основанию 116; средство отсоединения 119 для отсоединения дальнего конца соединительного рычага от дальнего конца держателя 117 рычага. Позицией 114 обозначен тяжелый груз, который в этом варианте осуществления конструкции представляет собой бетонный блок, содержащий части 114а для зацепления со стропами, имеющие перевернутую U-образную форму и находящиеся у верхней поверхности бетонного блока.
Основание 116 включает в себя: первую пластину 121 (фиг.12) и вторую пластину 122 (фиг.14), образованные резанием стальной пластины с получением соответствующих по существу перевернутых треугольников; фиксирующую пластину 124, наклонно установленную в центральных частях первой и второй пластин, так чтобы соединить первую и вторую пластины друг с другом с обеспечением заданного промежутка; нижнюю пластину 123 (фиг.12 и 13), горизонтально установленную в нижних частях первой и второй пластин, так чтобы соединить первую и вторую пластины друг с другом с обеспечением заданного промежутка. В центральной части верхнего конца основания 116 выполнена часть 27 для зацепления краном, предназначенная для зацепления крюком 26а крана 26 через верхний строп 126 (фиг.12-14), при этом один конец стропа свешивается с крюка 26а крана 26 (фиг.14). Кроме того, в центральной части фиксирующей пластины 124 образовано сквозное отверстие 124а.
Первый вал 11 прикреплен к основанию 116 в положении смещения вправо между частью 27, предназначенной для зацепления крюком, и фиксирующей пластиной 124 (фиг.12 и фиг.13). Кроме того, держатель 117 рычага шарнирно подсоединен к первому валу 11 таким образом, чтобы дальняя концевая сторона держателя рычага была тяжелее, чем ближняя концевая сторона, то есть в ненагруженном состоянии дальний конец опущен. Более конкретно, держатель 117 рычага выполнен таким образом, что его часть, расположенная ближе к ближнему концу от центральной части в продольном направлении держателя рычага, с возможностью поворота установлена на первом валу 11, при этом дальний конец держателя 117 рычага выступает в правом наружном направлении от первой и второй пластин 121, 122. Кроме того, дальний конец держателя 117 рычага образован с удлиненным входным отверстием 117а, проходящим в продольном направлении держателя рычага (фиг.12 и 13).
Второй вал 12 прикреплен к нижнему концу основания 116, которое сужается влево, когда проходит в нижнем направлении. Соединительный рычаг 118 образован по существу в виде J-образной формы и выполнен так, что его дальний конец находится в зацеплении с дальним концом держателя 117 рычага посредством поворота дальнего конца соединительного рычага 118, чтобы таким образом вставить его в удлиненное входное отверстие 117а у дальнего конца держателя 117 рычага (фиг.13). Кроме того, соединительный рычаг 118 выполнен таким образом, что кольца 13а, образованные на других концах стропов 13, могут быть установлены на соединительном рычаге 118.
Средство отсоединения 119 содержит ползун 131, установленный на основании 116 с возможностью перемещения в вертикальном направлении, блокирующее средство 132, выполненное таким образом, чтобы оно входило в зацепление с ползуном для временного блокирования ползуна в поднятом положении, и средство деблокирования 133 для деблокирования временно заблокированного ползуна. Ползун 131 включает в себя поднимающийся/опускающийся шток 131а, свободно вставленный через сквозное отверстие 124а фиксирующей пластины 124, зацепную пластину 131b, за одно целое выполненную в верхней части поднимающегося/опускающегося штока, и элемент 131с для захождения пружины, прикрепленный к нижнему концу поднимающегося/опускающегося штока (фиг.12 и 13). Зацепной пластине 131b придана по существу наклонная С-образная форма, при этом она выполнена с возможностью вхождения в зацепление с ближним концом держателя 117 рычага для толкающего воздействия на этот ближний конец в нижнем направлении, когда ползун 131 опускается (фиг.12).
Блокирующее средство 132 содержит регулируемый брус 134, имеющий удлиненное зацепное отверстие 134а, через которое ползун 131 может быть свободно установлен и имеет возможность свободного перемещения в вертикальном направлении (фиг.12 и 13). Регулируемый брус 134 выполнен в виде плоского бруса и установлен на основании 116 так, что брус 134 может совершать поворот в вертикальной плоскости и скольжение в его продольном направлении в состоянии, при котором этот регулируемый брус свободно установлен на поднимающемся/опускающемся штоке 131а. Кроме того, в центре регулируемого бруса 134 образовано удлиненное зацепное отверстие 134а, длина которого незначительно больше ширины поднимающегося/опускающегося штока 131а. Регулируемый брус 134 включает в себя один конец, который должен быть расположен на плече 136, описанном далее, вблизи от ближнего конца этого плеча, или который удерживается в положении незначительного отхода от плеча, и другой конец, с возможностью перемещения устанавливаемый между парой вторых пальцев 34b,34b, прикрепленных к основанию 116 над фиксирующей пластиной 124. Аналогично первому варианту осуществления конструкции поднимающийся/опускающийся шток 131а выполнен таким образом, чтобы он входил в зацепление с краями удлиненного зацепного отверстия 134а, когда регулируемый брус 134 установлен под заданным углом наклона.
Средство деблокирования 133 содержит плечо 136, предназначенное для перемещения регулируемого бруса 134 в направлении отсоединения ползуна 131 от регулируемого бруса 134, и деблокирующую пружину 137 для опускания ползуна (фиг.12 и 13). Ближний конец плеча 136 с возможностью поворота установлен на третьем пальце 36b первого кронштейна 36а, установленного на фиксирующей пластине 124, так что плечо 136 будет расположено в положении его укладывания на фиксирующую пластину 124 (фиг.12 и 13). Плечо 136 выполнено со сквозным отверстием 136с, находящимся в центре плеча, через которое может быть свободно вставлен поднимающийся/опускающийся шток 131а.
Первая пластина 121 образована со сквозным отверстием 21а, расположенным над дальним концом плеча 136, при этом дальний конец плеча 136 имеет прикрепленный к нему рабочий трос 46. Этот трос 46 проходит через сквозное отверстие 21а и расположен снаружи основания 116, при этом ползун 131 освобождается от регулируемого бруса 134 посредством тянущего воздействия этим тросом 46. Кроме того, деблокирующую пружину 137 свободно устанавливают на поднимающийся/опускающийся шток 131а и зажимают между фиксирующей пластиной 124 и элементом 131с, предназначенным для захождения пружины.
Следует отметить, что держатель 117 рычага имеет дальнюю концевую поверхность, обеспеченную выступающей рукояткой 48, которая может быть захвачена рабочим. На фиг.12 и фиг.13 позицией 138 обозначена работающая на сжатие спиральная пружина, предназначенная для поджатия регулируемого бруса 134 к плечу 136. Функция этой пружины 138 такова, что она поджимает регулируемый брус 134 к плечу 136 с силой поджатия в пределах диапазона, при котором регулируемый брус 34 может совершать поворот вокруг нижнего второго пальца 34b и будет обеспечена возможность перемещения регулируемого бруса 34 в его продольном направлении, чтобы таким образом предотвратить подпрыгивание регулируемого бруса 134, например, вследствие вибрации или ударного воздействия. Кроме того, позицией 139 на фиг.12 и фиг.13 обозначен стопорный палец, позволяющий избежать разъединения зацепной пластины 131b с ближним концом держателя 117 рычага.
Далее будет разъяснена работа демонтажного устройства 110 для стропов, которое выполнено так, как описано выше.
Во-первых, крюк 26а крана 26 входит в зацепление с частью 27, предназначенной для зацепления краном, посредством верхнего стропа 126, при этом одни концы стропов 13 подвешивают на крюке 26а (фиг.12-14). В этом состоянии основание 116 будет расположено непосредственно выше бетонного блока 114. В это время дальний конец соединительного рычага 118 будет расположен ниже его ближнего конца (фиг.12), при этом рукоятка 48 на дальнем конце держателя 117 рычага будет захвачена и дальний конец держателя 117 рычага опускается, так что ползун 131, находящийся в зацеплении с ближним концом держателя 117 рычага, поднимается. Кроме того, поскольку поднимающийся/опускающийся шток 131а находится в зацеплении с краями удлиненного зацепного отверстия 134а регулируемого бруса 134, ползун 131 будет временно заблокирован в поднятом положении, как только этот ползун 131 будет поднят. Когда оператор выпускает из своей руки рукоятку 48, верхняя поверхность ближнего конца держателя 117 рычага примыкает к зацепной пластине 131b посредством уравновешивания вокруг первого вала 11, так что держатель 117 рычага удерживается в наклоненном положении.
В этом состоянии стропы 13 пропускают через часть 114а бетонного блока 114 (фиг.14), предназначенную для зацепления со стропами, и они входят в зацепление с ней, после чего кольца 13а на других концах стропов устанавливают на соединительный рычаг 118 (фиг.13) и затем соединительный рычаг поворачивают вверх вокруг второго вала 12. Далее захватывают рукоятку 48 и поднимают дальний конец держателя 117 рычага, при этом дальний конец соединительного рычага 118 вставляют в удлиненное входное отверстие 117а держателя 117 рычага. Это приводит к зацеплению дальнего конца соединительного рычага 118 с дальним концом держателя 117 рычага (фиг.13).
После этого, когда бетонный блок 114 поднят (фиг.14) краном 26 посредством крюка 26а, основания 116 и стропов 13, вес бетонного блока 114 будет приложен к соединительному рычагу 118, то есть относительно большие силы, обусловленные крутящим моментом на основе веса бетонного блока 114, будут действовать в наружном направлении на дальний конец соединительного рычага 118, так что дальний конец соединительного рычага 118 будет прижат к внутренней концевой поверхности удлиненного входного отверстия 117а держателя 117 рычага. Это приводит к повышению силы трения между дальним концом соединительного рычага 118 и дальним концом держателя 117 рычага, поэтому дальний конец соединительного рычага 118 будет приведен в состояние зацепления с дальним концом держателя 117 рычага. В это время центр части 27, предназначенной для зацепления краном, и центр кольца 13а стропов 13, установленных на соединительном рычаге 118, будут расположены по существу на одной и той же вертикальной линии (фиг.13).
Когда бетонный блок 114 опущен в заданном месте, со стропов 13 будет снято напряжение, чтобы таким образом прекратить действие имеющейся относительно большой силы, воздействующей в наружном направлении на дальний конец соединительного рычага 118. Когда в этом состоянии на рабочий трос 46 оказывают тянущее воздействие, рычаг 136 будет поворачиваться в верхнем направлении вокруг третьего пальца 36b и ближний конец регулируемого бруса 134 будет поднят, так что зацепление поднимающегося/опускающегося штока 131а с удлиненным зацепным отверстием 34а будет устранено, то есть ползун 131 будет отсоединен от регулируемого бруса 134.
Таким образом, ползун 131 опускается под действием своего собственного веса и силы упругости деблокирующей пружины 137, при этом зацепная пластина 131b толкает вниз ближний конец держателя 117 рычага. В результате дальний конец держателя 117 рычага поднимается, так что дальний конец соединительного рычага 118 будет удален и высвобожден из удлиненного входного отверстия 117а, и при этом дальний конец соединительного рычага 118 будет повернут вниз, чтобы таким образом обеспечить отсоединение колец 13а стропов 13 от соединительного рычага 118 и их удаление. Кроме того, когда основание 116 поднято краном 26, стропы 13 высвобождаются от частей 114а бетонного блока 114, предназначенных для зацепления со стропами, и поднимаются совместно с основанием 116. При этом будет обеспечена возможность автоматического демонтажа стропов 13 с бетонного блока 114, опущенного в заданном месте. Следует заметить, что когда руки высвобождают рабочий трос 46, плечо 136 будет поворачиваться вниз вокруг третьего пальца 36b и обопрется о фиксирующую пластину 124, так что поднимающийся/опускающийся шток 131а будет находиться в зацеплении с краями удлиненного зацепного отверстия 134а регулируемого бруса 134.
На фиг.15 представлен третий вариант осуществления конструкции согласно настоящему изобретению. Позиции на фиг.15, идентичные позициям, указанным на фиг.11, обозначают те же самые детали.
В этом варианте конструкции верхняя часть основания 16 объединена с нижней частью блока 227 крюка 226. А именно, этот вариант выполнен таким образом, что верхняя часть основания 16 входит в зацепление у пластины 229 с нижним концом соединительного элемента 228, свешивающегося с блока 227 крюка крана 226. Иные конструкции, не относящиеся к указанной выше конструкции, такие же, как и в первом варианте.
В выполненном таким образом устройстве для демонтажа стропов основание 16 обычно объединено с нижней частью блока 227 крюка крана 226, посредством чего исключена необходимость выполнения операции крепления основания 16 к крюку крана и его отсоединения от крюка крана. Иные операции, не относящиеся к указанной выше операции, такие же, как и в случае первого варианта конструкции, поэтому их повторное описание не приведено.
На фиг.16 представлен четвертый вариант осуществления конструкции согласно настоящему изобретению. Позиции на фиг.16, которые идентичны позициям, указанным на фиг.1, обозначают идентичные детали.
В этом варианте конструкции на дальнем конце держателя 317 рычага расположена проходящая вниз зацепная деталь 317а, а дальний конец соединительного рычага 318 выполнен таким образом, чтобы он входил в зацепление с зацепной деталью 317а. Иные конструкции, не относящиеся к упомянутой выше конструкции, такие же, как и в первом варианте.
В выполненном таким образом устройстве для демонтажа стропа дальний конец соединительного рычага 318 не вставляют в удлиненное входное отверстие держателя рычага, а просто вводят в зацепление с зацепной деталью 317а, выступающей из держателя 317 рычага, чтобы таким образом улучшить возможность использования устройства в работе. Операции, которые не относятся к упомянутой выше операции, по существу такие же, что и в первом варианте конструкции, поэтому их повторное описание не приведено.
На фиг.17 представлен пятый вариант осуществления конструкции согласно настоящему изобретению. Позиции на фиг.17, которые идентичны позициям, указанным на фиг.1, обозначают идентичные детали.
В этом варианте конструкции поднимающийся/опускающийся шток 31а ползуна 31 имеет зацепной палец 431d, выступающий от боковой поверхности штока, вместо линейного элемента в первом варианте конструкции. Этот зацепной палец 431d выступает таким образом, чтобы он мог примыкать к боковым краям по ширине сквозного отверстия 36с плеча 36. Иные конструкции, не относящиеся к указанной выше конструкции, такие же, что и в первом варианте.
В выполненном таким образом устройстве для демонтажа стропа, когда ползун 31 опущен, зацепной палец 431d примыкает к боковым краям по ширине сквозного отверстия 36с плеча 36, чтобы таким образом столкнуть вниз дальний конец плеча 36 для притяжения дальнего конца плеча и его удерживания магнитной силой второго магнита 42, чтобы таким образом обеспечить зацепление регулируемого бруса 34с с ползуном 31 [фиг.17(b)].
Операции, которые не относятся к тому, что описано выше, по существу такие же, что и в случае первого варианта конструкции, поэтому их повторное описание не приведено.
Хотя каждый держатель рычага шарнирно подсоединен к действующему совместно с ним первому валу так, что в вариантах конструкции с первого по пятый дальняя концевая сторона держателя рычага выполнена более тяжелой, чем ближняя концевая сторона, держатель рычага может быть шарнирно подсоединен к действующему совместно с ним первому валу таким образом, что дальняя концевая сторона держателя рычага будет более легкой, чем ближняя концевая сторона, либо держатель рычага может быть шарнирно подсоединен к действующему совместно с ним первому валу так, что дальняя концевая сторона держателя рычага будет уравновешена с ближней концевой стороной, когда ближний конец держателя рычага с возможностью скольжения и поворота установлен на конце зацепной пластины. Примеры конструкций для крепления ближнего конца каждого держателя рычага с возможностью скольжения и поворота к концу зацепной пластины включают в себя конструкцию, имеющую удлиненное отверстие, образованное в ближнем конце держателя рычага или в концевой части зацепной пластины и проходящее вдоль них в продольном направлении, и палец, выступающий у концевой части зацепной пластины или у ближнего конца держателя рычага, так чтобы он входил в зацепление с удлиненным отверстием.
Согласно настоящему изобретению, как описано выше, каждый держатель рычага с возможностью поворота установлен на основании через действующий совместно с ним первый вал;
ближний конец каждого соединительного рычага, имеющего дальний конец, который может входить в зацепление с дальним концом действующего совместно с ним держателя рычага, с возможностью поворота установлен на основании через действующий совместно с ним второй вал;
средство отсоединения выполнено с возможностью опускания ближнего конца каждого держателя рычага;
средство отсоединения включает в себя ползун, который с возможностью перемещения в вертикальном направлении установлен на основании и который входит в зацепление с ближним концом каждого держателя рычага, чтобы таким образом создавать его поджатие в направлении подталкивания ближнего конца держателя рычага вниз;
ползун включает в себя поднимающийся/опускающийся шток и зацепную пластину, которая выполнена за одно целое с поднимающимся/опускающимся штоком в верхней части этого штока и которая проходит по горизонтали или наклонена;
зацепная пластина выполнена таким образом, чтобы она входила в зацепление с ближним концом каждого держателя рычага. Таким образом сохраняется состояние, при котором дальний конец каждого соединительного рычага находится в зацеплении с дальним концом действующего совместно с ним держателя рычага, когда вес тяжелого груза приложен к соединительному рычагу, в то время как дальний конец каждого держателя рычага поднят с помощью средства отсоединения, когда к каждому соединительному рычагу вес не приложен, так что дальний конец соединительного рычага будет отсоединен от дальнего конца действующего совместно с ним держателя рычага. В результате тяжелый груз может гарантировано удерживаться, как только он поднят. Кроме того, когда ползун средства отсоединения опущен и зацепная пластина находится в зацеплении с ближним концом каждого держателя рычага, чтобы таким образом обеспечить возможность воздействия собственного веса ползуна в состоянии, при котором тяжелый груз предварительно поднят, другой конец каждого стропа будет отсоединен от действующего совместно с ним соединительного рычага, так чтобы строп мог быть быстро демонтирован с тяжелого груза, когда этот груз опущен в заданном месте. Далее, по сравнению с обычными демонтажными устройствами, которым приданы большие размеры по сравнению с размерами, требуемыми соответственно размерам колец нижних стальных тросов в случае подъема тяжелого груза, для демонтажного устройства согласно настоящему изобретению достаточно, чтобы оно имело большой размер в требуемой минимальной степени для обеспечения прочности, соответствующей весу увеличенного груза в случае подъема этого груза.
Кроме того, если угол α представляет собой тупой угол, когда вес тяжелого груза значительно больше, чем собственный вес соединительного рычага (рычагов), балочная часть соединительного рычага поворачивается далее в направлении перехода из горизонтального положения в направленное вниз положение, так что другие концы стропов будут отсоединены от соединительного рычага. В свою очередь, если угол β представляет собой тупой угол, когда вес тяжелого груза относительно мал, так что собственный вес соединительного рычага (рычагов) влияет на его крутящий момент, балочная часть соединительного рычага поворачивается далее в направлении перехода из горизонтального положения в направленное вниз положение и при этом другие концы стропов отсоединяются от соединительного рычага.
Ползун средства отсоединения установлен на основании с возможностью перемещения в вертикальном направлении, при этом на основании расположено блокирующее средство для временного блокирования ползуна в поднятом положении, а средство деблокирования выполнено таким образом, чтобы деблокировать временно заблокированный ползун. При этом сохраняется состояние, в случае которого дальний конец каждого соединительного рычага будет находиться в зацеплении с дальним концом действующего совместно с ним держателя рычага, когда вес тяжелого груза приложен к соединительному рычагу через стропы. Кроме того, когда временно заблокированный ползун деблокирован с помощью средства деблокирования и вес тяжелого груза не приложен через строп к каждому соединительному рычагу, дальний конец держателя рычага поднимается посредством ползуна, так что дальний конец каждого соединительного рычага будет разъединен с дальним концом держателя рычага. В результате при подъеме тяжелого груза этот груз может гарантированно удерживаться, а стропы могут быть автоматически демонтированы с тяжелого груза, когда этот груз опущен в заданном месте, посредством деблокирования временно заблокированного ползуна с помощью средства деблокирования в состоянии, при котором тяжелый груз предварительно поднят. Кроме того, если поднимающийся/опускающийся шток ползуна выполнен для его введения с возможностью перемещения в сквозное отверстие фиксирующей пластины основания, а зацепная пластина, расположенная на верхней части поднимающегося/опускающегося штока выполнена так, чтобы она имела возможность зацепления с ближним концом держателя рычага, сохраняется состояние, при котором дальний конец каждого соединительного рычага будет находиться в зацеплении с дальним концом действующего совместно с ним держателя рычага, когда вес тяжелого груза приложен через стропы к соединительному рычагу, и зацепная пластина поднимает дальний конец каждого держателя рычага посредством собственного веса поднимающегося/опускающегося штока и самой зацепной пластины, чтобы таким образом разъединить дальний конец каждого соединительного рычага с дальним концом действующего совместно с ним держателя, когда вес тяжелого груза не приложен через стропы к каждому соединительному рычагу. При этом будет обеспечено гарантированное удерживание груза, когда он поднят. Далее, стропы могут быть автоматически демонтированы с тяжелого груза, когда этот груз опущен в заданном месте, посредством деблокирования временно заблокированного ползуна при помощи средства деблокирования, чтобы таким образом обеспечить воздействие собственного веса зацепной пластины на ближний конец каждого держателя рычага в состоянии, когда тяжелый груз предварительно поднят.
Демонтажное устройство для стропа, предназначенного для подъема тяжелого груза, которое создано согласно настоящему изобретению, может быть использовано для демонтажа стропа с тяжелого груза, когда этот груз, зацепленный стропом и поднятый им, опущен в заданном месте.
Изобретение относится к грузозахватным устройствам, в частности к устройству, используемому для демонтажа (освобождения) стропа от тяжелого груза. Устройство содержит основание (16), которое имеет часть (27) для зацепления краном, предназначенную для того, чтобы с ее верхней частью входил в зацепление крюк крана. Каждый из первых валов (11), прикрепленных к основанию на уровне, который ниже части, предназначенной для зацепления краном, имеет держатель (17) рычага, шарнирно подсоединенный по существу в его средней части. Каждый из вторых валов (12), прикрепленных к основанию на уровне, который ниже первых валов, имеет подсоединенный к нему с возможностью поворота и находящийся у основания первый конец соединительного рычага (18), при этом второй конец соединительного рычага с возможностью разъединения сблокирован с первым концом держателя рычага. Строп (13), имеющий один конец, который закреплен вокруг крюка крана и может входить в зацепление с тяжелым предметом, имеет другой конец, с возможностью отсоединения закрепленный вокруг соединительного рычага. Кроме того, средство отсоединения (19) отсоединяет соответствующий конец соединительного рычага от взаимодействующего с ним соответствующего конца держателя рычага. Для подъема тяжелого предмета необходимо лишь обеспечить требуемое минимальное увеличение размера, что означает обеспечение прочности, соответствующей нагрузке от тяжелого предмета. Изобретение таким образом обеспечивает повышение прочности устройства. 6 з.п. ф-лы, 17 ил.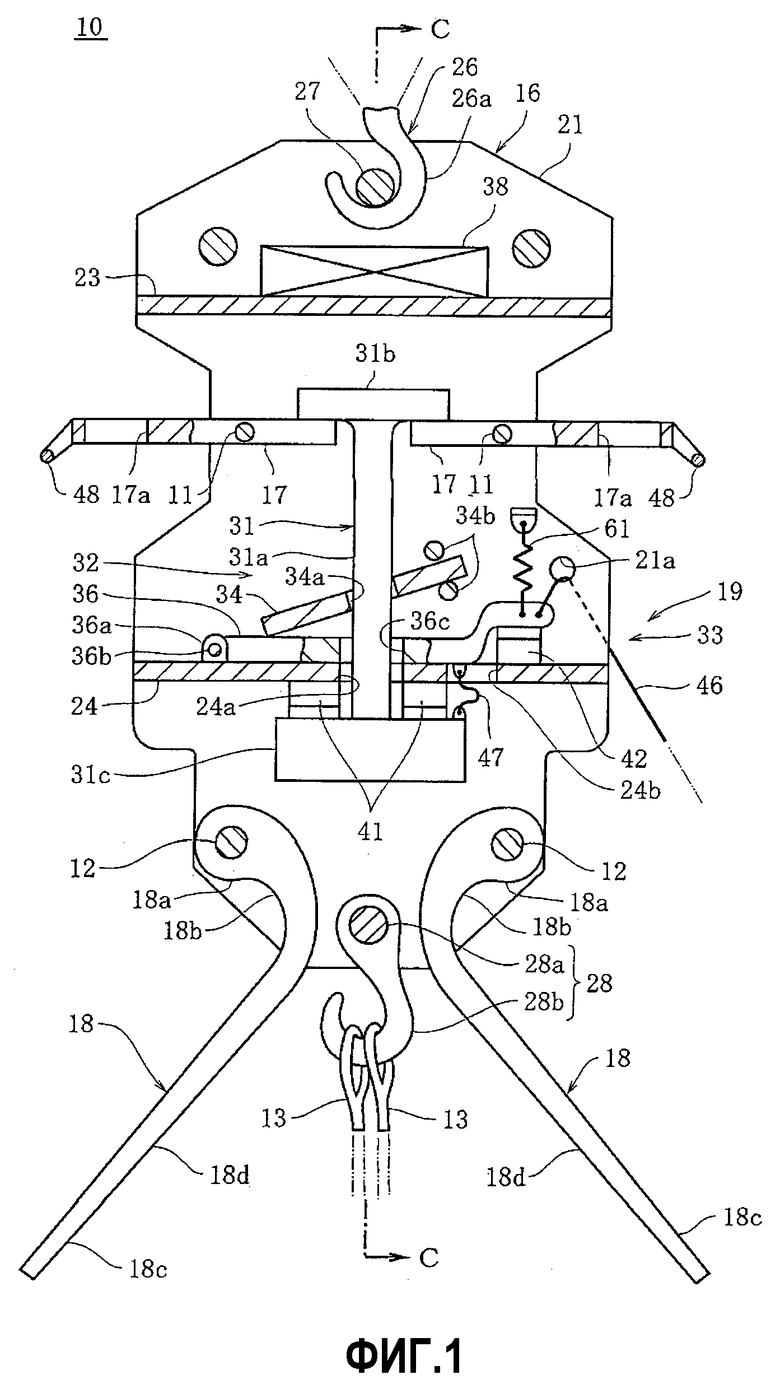
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| US 3926467 A, 16.12.1975 | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| Способ прогнозирования тромбоэмболических послеоперационных осложнений | 2020 |
|
RU2732246C1 |
| Грузовой крюк для воздушно-трелевочной установки | 1981 |
|
SU977357A2 |

