Изобретение относится к радиолокации, а именно к радиолокационным системам наблюдения за воздушной обстановкой и поверхностью на базе бортовой РЛС, работающей в режиме "реального луча" с электронным сканированием.
При наблюдении бортовой РЛС (БРЛС) за группой воздушных объектов или поверхностью в режиме реального луча осуществляется построчное сканирование лучом РЛС заданного сектора пространства путем последовательного смещения луча по азимуту и углу места на ширину диаграммы направленности антенны (ДНА). Четкость радиолокационного изображения (РЛИ) и точность определения угловых координат объектов в срезах дальности при таком способе наблюдения ограничена шириной ДНА. При наблюдении за одиночными воздушными объектами известны методы пеленгации для определения угловых координат (Финкельштейн М.И. Основы радиолокации: Учебник для вузов. М.: Радио и связь, 1983. 536 с.). Однако при наличии группы объектов в одном сечении дальности в пределах одной ДНА (тем более при наблюдении за поверхностью) такие методы не работают. Возникает проблема повышения разрешения РЛС совместно по азимуту и углу места в режиме "реального луча" путем синтезирования новых элементов разрешения с угловыми размерами, меньшими ширины ДНА, в заданных сечениях дальности.
Наиболее близким по технической сущности является способ синтезирования новых элементов разрешения по азимуту при переднем обзоре в режиме "реального луча" (Пат.2249832 РФ. Способ наблюдения за поверхностью на базе бортовой РЛС / В.К.Клочко, Г.Н.Колодько, В.И.Мойбенко, А.А.Ермаков (РФ). Заявка №2003126516. Приоритет 02.09.03), который заключается в следующем. Повышение разрешающей способности с расширением зоны обзора РЛС по азимуту и формирование матрицы радиолокационного изображения поверхности в режиме реального луча с электронным сканированием достигается за счет быстрого электронного переключения (смещения) луча РЛС по азимуту на величину n-й части ширины ДНА и обработки полученных при каждом положении луча амплитуд отраженных сигналов РЛС, которая заключается в следующем.
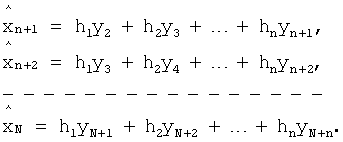
1. Амплитуды отраженных сигналов на выходе суммарного канала РЛС y1, y2, ..., yn, полученные при n первых положениях луча РЛС в данном i-м элементе разрешения по дальности суммируются с весами h1, h2, ..., hn, которые вычисляются по определенной методике. Результатом такой обработки является оценка  амплитуды хn отраженного сигнала, соответствующего n-й части ДНА при первом положении луча:
амплитуды хn отраженного сигнала, соответствующего n-й части ДНА при первом положении луча:

2. При последующих смещениях луча на n-ю часть ДНА амплитуды сигналов, полученные при n последних положениях луча, суммируются с теми же весами, в результате чего последовательно находятся оценки xn+1, xn+2, ..., xN:
3. Оценки  амплитуд xj (j=n, n+1, ..., N), найденные независимо в каждом i-м (i=1, 2, ..., M) элементе разрешения по дальности, располагают в М строк и N-n+1 столбцов и тем самым формируют матрицу радиолокационного изображения поверхности в виде совокупности амплитуд A(i,j),
амплитуд xj (j=n, n+1, ..., N), найденные независимо в каждом i-м (i=1, 2, ..., M) элементе разрешения по дальности, располагают в М строк и N-n+1 столбцов и тем самым формируют матрицу радиолокационного изображения поверхности в виде совокупности амплитуд A(i,j),  ,
,  сигналов, отраженных от соответствующих i-, j-x элементов поверхности.
сигналов, отраженных от соответствующих i-, j-x элементов поверхности.
Однако такой способ обладает следующими недостатками.
1. В указанном способе повышение разрешающей способности достигается только по одной угловой координате - азимуту.
2. Указанный способ не применим при наблюдении за группой воздушных объектов, расположенных в одном сечении (элементе разрешения) дальности и в пределах одной ДНА, т.е. не различимых по угловым координатам.
3. Использование данных только одного суммарного канала РЛС дает оценки амплитуд с ограниченной точностью.
Технический результат направлен на совместное повышение разрешающей способности по азимуту и углу места в заданных сечениях дальности с сохранением области обзора РЛС по азимуту и углу места и увеличение точности оценивания амплитуд сигналов в синтезированных элементах разрешения.
Технический результат предлагаемого технического решения достигается тем, что при наблюдении за воздушной обстановкой или поверхностью с помощью бортовой РЛС в режиме реального луча с электронным сканированием формируют матрицу радиолокационного изображения воздушной обстановки или поверхности в срезах дальности, при этом за счет быстрого электронного переключения луча РЛС смещают луч по азимуту и углу места построчно соответственно на величину n-й и m-й части ширины ДНА (на уровне 0,5 мощности) в зоне обзора, измеряют амплитуды сигналов отражения при каждом i, j-м положении луча и формируют из этих амплитуд матрицу измерений y(i,j), 
 , суммарного канала, которую далее обрабатывают, отличающийся тем, что дополнительно формируют матрицу измерений y'(i,j),
, суммарного канала, которую далее обрабатывают, отличающийся тем, что дополнительно формируют матрицу измерений y'(i,j), 
 разностного канала, затем обрабатывают полученные матрицы для каждого i, j-го положения луча, при этом элементы матриц y(i+k, j+l) и y'(i+k, j+l),
разностного канала, затем обрабатывают полученные матрицы для каждого i, j-го положения луча, при этом элементы матриц y(i+k, j+l) и y'(i+k, j+l),  ,
,  , взятые относительно i, j в окне размера M×N, суммируют с весами h(k,l) и h'(k,l), найденными заранее, и оценивают амплитуду x(i,j), соответствующую центральной m, n-й части ДНА при i, j-м положении луча
, взятые относительно i, j в окне размера M×N, суммируют с весами h(k,l) и h'(k,l), найденными заранее, и оценивают амплитуду x(i,j), соответствующую центральной m, n-й части ДНА при i, j-м положении луча

указанные операции повторяют для всех i, j в зоне обзора и тем самым получают матрицу оценок амплитуд 
 ,
,  , представляющую восстановленное радиолокационное изображение воздушной обстановки или поверхности в заданных элементах дальности с повышенным в несколько раз разрешением по угловым координатам.
, представляющую восстановленное радиолокационное изображение воздушной обстановки или поверхности в заданных элементах дальности с повышенным в несколько раз разрешением по угловым координатам.
Способ осуществляется следующим образом.
Повышение разрешающей способности РЛС по азимуту и углу места в заданной угломерной области воздушного пространства или поверхности в данном элементе разрешения дальности и формирование матрицы радиолокационного изображения поверхности или воздушной обстановки в режиме реального луча с электронным сканированием достигается за счет быстрого электронного переключения (смещения) луча РЛС по азимуту и углу места построчно соответственно на величину n-й и m-й части ширины ДНА и обработки полученных при сканировании лучом зоны обзора амплитуд отраженных сигналов РЛС на выходе не только разностного, но и суммарного канала РЛС, которая заключается в следующем.
1. Амплитуды отраженных сигналов на выходе суммарного и разностного каналов РЛС y(i,j) и y'(i,j), полученные при каждом i, j-м положении луча, формируют в матрицы y(i,j) и у'(i,j),  ,
,  .
.
2. Относительно каждого i, j-го элемента искомой матрицы изображения строится окно размера M×N и амплитуды суммарного у(i+k, j+l) и разностного y'(i+k, j+l) каналов РЛС, взятые в этом окне при  ,
,  , суммируют с весовыми коэффициентами h(k,l) и h'(k,l), расчет которых дан ниже, в результате чего получают оценку амплитуды i, j-го элемента дискретизации поля отражения:
, суммируют с весовыми коэффициентами h(k,l) и h'(k,l), расчет которых дан ниже, в результате чего получают оценку амплитуды i, j-го элемента дискретизации поля отражения:

3. Полученная матрица 
 , , представляет восстановленное в данном сечении дальности радиолокационное изображение в i, j-x синтезированных элементах разрешения по азимуту и углу места, размеры которых в несколько раз меньше ширины ДНА. По совокупности всех элементов разрешения дальности формируется трехмерное изображение области воздушного пространства или поверхности.
, , представляет восстановленное в данном сечении дальности радиолокационное изображение в i, j-x синтезированных элементах разрешения по азимуту и углу места, размеры которых в несколько раз меньше ширины ДНА. По совокупности всех элементов разрешения дальности формируется трехмерное изображение области воздушного пространства или поверхности.
Расчет весовых коэффициентов сводится к следующему.
Сканирование лучом РЛС осуществляется построчно: фиксируется i-я строка и луч последовательно перемещается по строке (меняется j) на n-ю часть ширины ДНА по азимуту. Затем осуществляется переход к следующей (i+1)-й строке путем изменения (смещения) положения луча на m-ю часть ширины ДНА по углу места (меняется i), после чего сканирование по азимуту (по j) повторяется. Амплитуда y(i,j) сигнала на выходе суммарного канала в k-м фиксированном элементе разрешения дальности при i, j-м положении луча по азимуту и углу места после некоторых предварительных преобразований представляет сумму амплитуд x(i+k, j+l) сигналов поля отражения, взятых с коэффициентами ДНА α(k,l) по всем k, l-м элементам дискретизации в пределах ДНА, с учетом помехи p(i,j):

Модель (1) аналогична модели пространственного смазывания РЛИ по строкам и столбцам. Коэффициенты α(k,l) ДНА суммарного канала представляют функцию с разделенными переменными: α(k,l)=α1(k)·α2(l) и модель измерения (1) допускает разделение

и последующую двухэтапную обработку: вначале по строкам, затем по столбцам, направленную на восстановление искомого поля отражения x(i,j). Это позволяет использовать известные одномерные алгоритмы оценивания параметров поля по интегральным (суммарным) наблюдениям (например, Клочко В.К., Чураков Е.П., Фатьянов С.О. Калмановский алгоритм восстановления смазанного радиолокационного изображения // Известия вузов. Радиоэлектроника. 2004. Том 47. №9-10. С.54-59). В общем случае оценка  параметрах x(i,j) имеет вид
параметрах x(i,j) имеет вид

где h1(k), h2(l) - весовые коэффициенты, вычисляемые заранее по определенной методике; М≥m, N≥n. Так как число MN измерений, участвующих в оценивании x(i,j), меньше числа (M+m-1)(N+n-1) оцениваемых параметров, входящих в состав этих измерений, то точность оценки (3) недостаточна для различения нескольких близко расположенных точечных объектов (на расстоянии размера элемента дискретизации).
Для увеличения точности оценивания поля x(i,j) в элементах дискретизации i, j, приводящему к повышению разрешающей способности по угловым координатам, предлагается дополнительно с суммарным каналом использовать данные разностного канала. Модель амплитуды сигнала на выходе разностного канала аналогична (1):

но отличается тем, что коэффициенты β(k,l) ДНА разностного канала не описываются функцией с разделенными переменными: β(k,l)≠β1(k)/β2(l), и двухэтапная процедура обработки для разностного канала оказывается неприменимой.
Для получения оценки по данным суммарного и разностного каналов РЛС рассматриваются измерения y(i,j), y'(i,j) в M×N-окрестности i, j-го элемента, которые удобно пронумеровать в сквозном порядке (построчно) и представить в составе 2МN-вектора

где М≥m, N≥n. Параметры x(i,j), входящие в состав 2MN измерений, представляются вектором

где S=M+m-1, L=N+n-1. Помехи p(i,j) и p'(i,j) собираются в 2MN-векторе P(i,j)=(p1, р2, ..., р2MN)T. Тогда модель измерений (1), (4) представляется в следующей матричной форме:

где А - матрица размерности 2MN×SL, сформированная в соответствии с (1), (4) из двумерных коэффициентов ДНА первого канала αij,  ,
,  и второго канала βij,
и второго канала βij,  ,
,  :
:

Уравнение (5) в развернутом виде представляет систему 2MN уравнений с (M+m-1)(N+n-l) неизвестными Х. При определенных значениях М и N получается избыточность измерений по отношению к оцениваемым параметрам: 2MN>(M+m-1)(N+n-1), что позволяет находить оценки  искомых параметров Х методом наименьших квадратов (МНК). В матричной форме минимизация функции
искомых параметров Х методом наименьших квадратов (МНК). В матричной форме минимизация функции  по
по  приводит к регуляризованным МНК-оценкам
приводит к регуляризованным МНК-оценкам

где δ - параметр регуляризации, необходимый для обращения плохо обусловленной матрицы АTА; Е - единичная матрица; Н=(АTА)-1АT - матрица весовых коэффициентов; Т - символ транспонирования.
При обращении АTА удобно использовать рекуррентную процедуру:

где ak - k-я строка матрицы А коэффициентов ДНА.
В качестве оценки элемента поля x(i.j), расположенного в центре M×N-окна, принимается центральный элемент вектора  с наименьшей дисперсией ошибки оценивания, который вычисляется по формуле
с наименьшей дисперсией ошибки оценивания, который вычисляется по формуле

Оценка  представляет амплитуду сигнала отражения в m, n-й части ДНА (элементе дискретизации), соответствующей центру ij-го положения луча РЛС (синтезированного элемента разрешения по азимуту и углу места). При вычислении
представляет амплитуду сигнала отражения в m, n-й части ДНА (элементе дискретизации), соответствующей центру ij-го положения луча РЛС (синтезированного элемента разрешения по азимуту и углу места). При вычислении  используется центральная строка матрицы H, соответствующая минимуму дисперсии ошибки оценивания ковариационной матрицы
используется центральная строка матрицы H, соответствующая минимуму дисперсии ошибки оценивания ковариационной матрицы  . Алгоритм оценивания представляет линейную комбинацию измерений, взятых с заранее просчитанными весовыми коэффициентами и его удобно представить в виде
. Алгоритм оценивания представляет линейную комбинацию измерений, взятых с заранее просчитанными весовыми коэффициентами и его удобно представить в виде
где h1, h2, ..., h2MN - соответствующая строка матрицы Н; y1, y2, ..., y2MN - измерения суммарного и разностного каналов, причем М≥m, N≥n и принимается  , если
, если  . Возможно получение сразу нескольких оценок
. Возможно получение сразу нескольких оценок  ,
,  ,
,  для одного вектора измерений Y путем использования соответствующих строк матрицы Н, однако для обеспечения одинаковой точности этих оценок следует увеличить число измерений 2MN: М>m, N>n.
для одного вектора измерений Y путем использования соответствующих строк матрицы Н, однако для обеспечения одинаковой точности этих оценок следует увеличить число измерений 2MN: М>m, N>n.
Возвращаясь к первоначальной нумерации (по строкам и столбцам), алгоритм (9) принимает вид

Точность оценок (10) описывается корреляционной матрицей ошибок оценивания  . Свойство матрицы КX при заданных коэффициентах αij и βij полностью определяется параметрами m, n, М, N. В табл.1 представлены следующие расчетные величины: среднеквадратическое отклонение (СКО) ошибки оценивания σ=σ[Δх],
. Свойство матрицы КX при заданных коэффициентах αij и βij полностью определяется параметрами m, n, М, N. В табл.1 представлены следующие расчетные величины: среднеквадратическое отклонение (СКО) ошибки оценивания σ=σ[Δх],  взятое из корреляционной матрицы КX, и оценка СКО
взятое из корреляционной матрицы КX, и оценка СКО  найденная путем моделирования, при σP=1 в зависимости от размеров M×N окна измерений для двух и одного каналов. Моделировались 4 близко расположенных точечных объекта в пределах ДНА размера в m×n=3×3 элементов дискретизации. В табл.2 показано слева направо в окне m×n: искомое поле x(i,j), измерения первого канала y(i,j) и оценки
найденная путем моделирования, при σP=1 в зависимости от размеров M×N окна измерений для двух и одного каналов. Моделировались 4 близко расположенных точечных объекта в пределах ДНА размера в m×n=3×3 элементов дискретизации. В табл.2 показано слева направо в окне m×n: искомое поле x(i,j), измерения первого канала y(i,j) и оценки  , полученные с помощью (9) при m×n=3×3 в окне измерений M×N=5×5 для двухканальной обработки с округлением до целого. Для сравнения в табл.3 даны результаты, полученные для одноканальной обработки. Использовались следующие аппроксимации коэффициентов ДНА суммарного и разностного каналов: αij=exp[-(i2+j2)], βij=0,7ехр[-1.5(ρ-1)2],
, полученные с помощью (9) при m×n=3×3 в окне измерений M×N=5×5 для двухканальной обработки с округлением до целого. Для сравнения в табл.3 даны результаты, полученные для одноканальной обработки. Использовались следующие аппроксимации коэффициентов ДНА суммарного и разностного каналов: αij=exp[-(i2+j2)], βij=0,7ехр[-1.5(ρ-1)2],  . Видно, что точность двухканальной обработки существенно выше одноканальной.
. Видно, что точность двухканальной обработки существенно выше одноканальной.
Алгоритм (9) или (10) при наблюдении за воздушными объектами реализуется в тех элементах разрешения по дальности, в которых зафиксирован отраженный сигнал. При наблюдении за поверхностью восстанавливается трехмерное изображение  по совокупности всех k-x срезов дальности в области обзора или обрабатываются по предложенной методике амплитуды сигналов, принятых в заданном диапазоне дальности (imin, imax), накрывающем наблюдаемый участок поверхности. Пространственные элементы дискретизации (i, j, k) представляют синтезированные элементы разрешения, угловые размеры которых в несколько раз меньше ширины ДНА.
по совокупности всех k-x срезов дальности в области обзора или обрабатываются по предложенной методике амплитуды сигналов, принятых в заданном диапазоне дальности (imin, imax), накрывающем наблюдаемый участок поверхности. Пространственные элементы дискретизации (i, j, k) представляют синтезированные элементы разрешения, угловые размеры которых в несколько раз меньше ширины ДНА.
Предлагаемый способ позволяет в несколько раз повысить разрешающую способность РЛС по азимуту и углу места в сечениях дальности в режиме "реального луча" с сохранением области обзора РЛС по азимуту и углу места и сформировать матрицу радиолокационного изображения воздушной обстановки или поверхности в виде совокупности амплитуд  ,
,  ,
,  сигналов, отраженных от соответствующих i, j-x элементов угломерного пространства в k-x элементах разрешения дальности, которая позволяет наблюдать на экране индикатора группу воздушных объектов или поверхность (объекты на поверхности) в условиях отсутствия оптической видимости, что повышает безопасность полетов и эффективность решения поставленных перед летчиком задач.
сигналов, отраженных от соответствующих i, j-x элементов угломерного пространства в k-x элементах разрешения дальности, которая позволяет наблюдать на экране индикатора группу воздушных объектов или поверхность (объекты на поверхности) в условиях отсутствия оптической видимости, что повышает безопасность полетов и эффективность решения поставленных перед летчиком задач.






Изобретение относится к радиолокации, а именно к радиолокационным системам наблюдения за воздушной обстановкой и поверхностью на базе бортовой РЛС, работающей в режиме "реального луча", с электронным сканированием. Технический результат заключается в повышении разрешающей способности по азимуту и углу места в заданных сечениях дальности с сохранением области обзора РЛС по азимуту и углу места и увеличение точности оценивания амплитуд сигналов в синтезированных элементах разрешения. Технический результат достигается тем, что в известном способе, основанном на работе в режиме реального луча с электронным сканированием, заключающийся в формировании матрицы радиолокационного изображения воздушной обстановки или поверхности в срезах дальности, при этом за счет быстрого электронного переключения луча РЛС смещают луч по азимуту и углу места построчно соответственно на величину n-й и m-й части ширины ДНА в зоне обзора, измеряют амплитуды сигналов отражения при каждом i,j-м положении луча и формируют из этих амплитуд матрицу измерений y(i,j),  ,
,  , суммарного канала, которую далее обрабатывают, дополнительно формируют матрицу измерений y'(i,j),
, суммарного канала, которую далее обрабатывают, дополнительно формируют матрицу измерений y'(i,j), 
 разностного канала, затем обрабатывают полученные матрицы для каждого i, j-го положения луча, при этом элементы матриц y(i+k, j+1) и y'(i+k, j+1), суммируют с весами h(k,l) и h'(k,l) и оценивают амплитуду x(i,j), указанные операции повторяют для всех i, j в зоне обзора и тем самым получают матрицу оценок амплитуд
разностного канала, затем обрабатывают полученные матрицы для каждого i, j-го положения луча, при этом элементы матриц y(i+k, j+1) и y'(i+k, j+1), суммируют с весами h(k,l) и h'(k,l) и оценивают амплитуду x(i,j), указанные операции повторяют для всех i, j в зоне обзора и тем самым получают матрицу оценок амплитуд  . 3 табл.
. 3 табл.
Способ наблюдения за воздушными объектами и поверхностью на базе бортовой РЛС, основанный на работе в режиме реального луча с электронным сканированием, заключающийся в формировании матрицы радиолокационного изображения воздушной обстановки или поверхности в срезах дальности, при этом за счет быстрого электронного переключения луча РЛС смещают луч по азимуту и углу места построчно соответственно на величину n-й и m-й части ширины ДНА в зоне обзора, измеряют амплитуды сигналов отражения при каждом i-м, j-м положении луча и формируют из этих амплитуд матрицу измерений y'(i,j),  ,
,  суммарного канала, которую далее обрабатывают, отличающийся тем, что дополнительно формируют матрицу измерений y'(i,j), , разностного канала, затем обрабатывают полученные матрицы для каждого i,j-го положения луча, при этом элементы матриц y(i+k,j+1) и y'(i+k,j+1),
суммарного канала, которую далее обрабатывают, отличающийся тем, что дополнительно формируют матрицу измерений y'(i,j), , разностного канала, затем обрабатывают полученные матрицы для каждого i,j-го положения луча, при этом элементы матриц y(i+k,j+1) и y'(i+k,j+1), 
 , взятые относительно i,j в окне размера M×N, суммируют с весами h(k,l) и h'(k,l), найденными заранее, и оценивают амплитуду x(i,j), соответствующую центральной m-й, n-й части ДНА при i-й, j-м положении луча
, взятые относительно i,j в окне размера M×N, суммируют с весами h(k,l) и h'(k,l), найденными заранее, и оценивают амплитуду x(i,j), соответствующую центральной m-й, n-й части ДНА при i-й, j-м положении луча

указанные операции повторяют для всех i,j в зоне обзора и тем самым получают матрицу оценок амплитуд  ,
,  ,
,  , представляющую восстановленное радиолокационное изображение воздушной обстановки или поверхности в заданных элементах дальности с повышенным в несколько раз разрешением по угловым координатам.
, представляющую восстановленное радиолокационное изображение воздушной обстановки или поверхности в заданных элементах дальности с повышенным в несколько раз разрешением по угловым координатам.
| СПОСОБ НАБЛЮДЕНИЯ ЗА ПОВЕРХНОСТЬЮ НА БАЗЕ БОРТОВОЙ РЛС | 2003 |
|
RU2249832C1 |
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПРЯМОЛИНЕЙНО ЛЕТЯЩЕЙ ЦЕЛИ ПРИ МНОГОЧАСТОТНОМ УЗКОПОЛОСНОМ ЗОНДИРОВАНИИ | 1995 |
|
RU2099743C1 |
| WO 02071095 А2, 12.09.2002 | |||
| US 6608585 B2, 19.08.2003 | |||
| DE 19618155 A1, 13.11.1997. | |||

