Изобретение относится к радиолокационной технике и может быть использовано в когерентно-импульсной РЛС сопровождения для получения двумерного радиолокационного изображения (РЛИ) и распознавания по нему воздушной цели.
Известен способ построения РЛИ [1] за счет обработки сигналов доплеровских частот, а также устройство для его реализации, которые могут быть применены в РЛС, осуществляющей сопровождение воздушной цели, совершающей при прямолинейном полете угловые перемещения вокруг взаимно ортогональных осей ввиду специфики аэродинамических свойств летательных аппаратов. Находясь на одной из осей вращения, локальный рассеиватель участвует во вращательном движении только относительно другой оси. Получение РЛИ возможно, если могут быть определены два или несколько таких рассеивателей, лежащих на одной оси вращения. Данные рассеиватели будут иметь аналогичные, с точностью до некоторого коэффициента, законы изменения доплеровских частот. На основе этого вычисляются средние значения угловых скоростей и значения корреляционных функций, связанных с ними. Величины корреляционных функций рассеивателей, вращающихся (качающихся) относительно взаимно ортогональных осей, позволяют определить положения данных рассеивателей в двумерной системе координат. Для определения корреляционных зависимостей между рассеивателями в данном способе предложено сопровождать цель десятки.сотни секунд и проводить при этом анализ доплеровских частот, разрешая отдельные рассеиватели.
Данный способ не обеспечивает высокого качества построения двумерного РЛИ и требует сопровождения объекта в течение недопустимо длительного времени (порядка 60.100 с), а также наличия в сопровождаемом объекте большого числа (более 10) рассеивателей. Это вызвано необходимостью детального сравнения доплеровских частот рассеивателей в течение времени сопровождения для нахождения такой пары рассеивателей, у которой доплеровские частоты на всем протяжении равны по модулю или отличаются с точностью до постоянного коэффициента. При этом известно, что РЛС сантиметрового диапазона при инверсном синтезировании апертуры [2] может обеспечить высокое разрешение в поперечном направлении [3] равное единицам метров, различая на поверхности цели до 10 рассеивателей при накоплении отраженного сигнала в течение единиц секунд, что соответствует временным нормативам, отводимым на распознавание целей в современных радиолокационных системах.
Известен также способ построения двумерного радиолокационного изображения цели в РЛС сопровождения с инверсным синтезированием апертуры и суммарно-разностной обработкой сигнала, основанный на доплеровском частотном анализе [2] выбранный за прототип, сущность которого состоит в том, что при сопровождении прямолинейного движущегося объекта для двух равных, но смещенных на 1-2 с интервалом инверсного синтезирования апертуры, получают доплеровские спектры цели, которые по времени соответствуют серединам этих интервалов накопления  , производится вычисление доплеровской частоты центра сопровождения цели G(ω) в данные моменты времени, рассчитывается угловая скорость поворота цели g′, определяются характер и величина изменений доплеровских частот локальных рассеивателей относительно G(ω) и квадранты плоскости изображения, соответствующие определенным рассеивателям, рассчитываются значения расстояний ri от центра сопровождения цели до i-х рассеивателей и углов ξi между линейными скоростями их вращения вокруг центра сопровождения Vi и их радиальными составляющими Vri по приведенным формулам, рассчитываются эффективные площади рассеяния (ЭПР) локальных рассеивателей σi, исходя из амплитуды их доплеровских гармоник в спектре, и в двумерной системе координат азимут-дальность формируют совокупность точек по числу локальных рассеивателей с использованием следующего правила:
, производится вычисление доплеровской частоты центра сопровождения цели G(ω) в данные моменты времени, рассчитывается угловая скорость поворота цели g′, определяются характер и величина изменений доплеровских частот локальных рассеивателей относительно G(ω) и квадранты плоскости изображения, соответствующие определенным рассеивателям, рассчитываются значения расстояний ri от центра сопровождения цели до i-х рассеивателей и углов ξi между линейными скоростями их вращения вокруг центра сопровождения Vi и их радиальными составляющими Vri по приведенным формулам, рассчитываются эффективные площади рассеяния (ЭПР) локальных рассеивателей σi, исходя из амплитуды их доплеровских гармоник в спектре, и в двумерной системе координат азимут-дальность формируют совокупность точек по числу локальных рассеивателей с использованием следующего правила:
при отнесении i-го рассеивателя в соответствующий квадрант в данном квадранте определяется точка, лежащая на дуге окружности радиуса ρi, касательная в которой к этой дуге составляет с радиальным направлением для 1 и 4 квадрантов и с ему противоположным для 2 и 3 квадрантов угол ξi а вокруг этой точки проводится окружность, радиус которой пропорционален ЭПР i-го рассеивателя.
Недостатком данного способа является низкое качество двумерной РЛИ, представляющего из себя совокупность нескольких точек на экране, а также необходимость расчета меняющейся доплеровской частоты центра сопровождения цели для середины двух интервалов синтезирования, что невозможно выполнить с достаточной точностью, и ввиду этого могут иметь место ошибки построения радиолокационного изображения, которые будут еще больше из-за наличия в расчетных формулах множества тригонометрических функций малого аргумента (изменения ракурса сопровождения воздушной цели за интервал времени  , составляющий 1.2 с). К тому же данный способ может быть применен лишь в РЛС с суммарно-разностной обработкой, что накладывает дополнительные ограничения на его реализацию. Кроме того, вывод формул для расчета координат рассеивателей ρi и ξi проведен при предположении постоянства угловой скорости изменения ракурса локации γ′, что на самом деле не так, в связи с этим существуют дополнительные ошибки построения РЛИ цели.
, составляющий 1.2 с). К тому же данный способ может быть применен лишь в РЛС с суммарно-разностной обработкой, что накладывает дополнительные ограничения на его реализацию. Кроме того, вывод формул для расчета координат рассеивателей ρi и ξi проведен при предположении постоянства угловой скорости изменения ракурса локации γ′, что на самом деле не так, в связи с этим существуют дополнительные ошибки построения РЛИ цели.
Целью изобретения является повышение точности и детальности построения двумерного радиолокационного изображения сопровождаемой воздушной цели, с помощью чего обеспечивается рост достоверности ее распознавания.
Для достижения цели изобретения в РЛС сопровождения сантиметрового диапазона предлагается применить узкополосное импульсное зондирование с линейным изменением несущей частоты от импульса к импульсу в сочетании с алгоритмом инверсного радиолокационного синтезирования апертуры (ИРСА). При этом высокое линейное разрешение сопровождаемой воздушной цели в радиальном, т. е. продольном относительно линии визирования цели (ЛВЦ) направлении, предлагается обеспечить за счет обработки отраженных сигналов на различных зондирующих частотах [4] а высокое линейное разрешение в азимутальном (поперечном относительно ЛВЦ) направлении за счет реализации метода ИРСА [2]
Для качественного распознавания сопровождаемой воздушной цели достаточно иметь разрешающие способности в радиальном и поперечном направлениях равные 1 м.
Известно, что линейное разрешение ΔD в радиальном направлении, которое может быть обеспечено при обработке отраженных сигналов с разносом частот Δf, может быть вычислено по формуле [5] ΔD = c/2Δf, где с скорость света. Таким образом, для получения ΔD, равного 1 м, необходима перестройка частоты Δf= с/2= 1,5•108 Гц. Высокого разрешения цели в радиальном направлении можно добиться переходом в частотную область, т.е. с помощью выполнения операции преобразования Фурье от амплитудно-фазовой выборки отраженного сигнала. Практически удобнее пользоваться алгоритмом быстрого преобразования Фурье (БПФ), используя выборку из 2N (N=1,2,) точек. Детальный спектральный портрет, характеризующий линейную протяженность сопровождаемой цели, можно сформировать, используя БПФ при N≥8 [5] Зададим N=9. Значит спектральной обработке необходимо будет подвергнуть радиолокационную информацию, содержащуюся в 512 отраженных от цели импульсах, частота заполнения которых изменяется с интервалом Δf/512 1,5•108/512 ≈ 255 КГц.
Важно, чтобы за время накопления этих 512 отраженных импульсов цель сохранила свою пространственную ориентацию, иначе изменения амплитуды отраженного сигнала будут зависеть не только от вариаций зондирующей частоты, но и от изменения расстояний в радиальном направлении между локальными рассеивающими центрами на поверхности цели, суперпозиция отражений от которых определяет в квазиоптической области амплитуду и фазу результирующего сигнала, рассеянного целью на определенном ракурсе. Для обеспечения указанного условия надо предусмотреть, чтобы время накопления 512 сигналов было меньше интервала корреляции траекторных нестабильностей полета цели. Современные импульсные РЛС сопровождения имеют частоты повторения импульсов Fи порядка десятков-сотен КГц в режиме квазинепрерывного излучения. Для Fи=100 КГц период повторения составит Ти=I/Fи=10 мкс, а суммарное время на накопление 512 реализаций будет равно 5,12 мс, что значительно меньше времени корреляции траекторных нестабильностей полета, составляющих величины 25-100 мс [6, 7]
Для получения линейного разрешения в поперечном направлении ΔL=1 м воспользуемся формулой [2] ΔL = rλ/(2vTcsinγ), где r дальность до цели; γ угол между вектором скорости цели и ЛВЦ; l длина волны; Тс время синтезирования (когерентного накопления), откуда Tc= rλ/(2vΔLsinγ). Из данной формулы видно, что для любой сопровождаемой цели, зная параметры ее движения, ракурс и длину волны, правильным выбором времени синтезирования можно обеспечить необходимое поперечное разрешение в 1 м. Для этого следует произвести расчет по формуле Tc= rλ/(2vsinγ), а затем разделить найденное Тс на 512 для нахождения интервала ΔTc, через который целесообразно производить измерение и запоминание массивов данных амплитуд и фаз отраженных импульсов, каждая группа из которых, состоящая из 512 реализаций, соответствует определенному ракурсу цели и обеспечивает ее разрешение в радиальном направлении за счет перестройки частоты от импульса к импульсу.
В результате описанных выше измерений можно составить квадратную матрицу с 512 строками и столбцами, элементами которой являются величины комплексного отраженного сигнала от цели (под комплексностью следует понимать наличие амплитудной и фазовой информации), изменяющиеся по столбцам за счет изменения несущей частоты, а по строкам за счет изменения ракурса локации цели.
Для формирования двумерного РЛИ сопровождаемой цели необходимо данные полученной матрицы многочастотно-синтезированного рассеяния цели подать на вход двумерного БПФ. На выходе двумерного БПФ получим массив данных в виде аналогичной матрицы размером 2Nx2N, которую будем называть в дальнейшем двумерно-спектральной матрицей рассеяния. Элементы полученной двумерно-спектральной матрицы будут характеризоваться интенсивностью двумерных спектральных составляющих рассеянного целью многочастотно-синтезированного сигнала. Столбцы двумерно-спектральной матрицы будут представлять собой номера ячеек спектрального разрешения цели в поперечном направлении (по азимуту), а номера строк будут соответствовать номерам ячеек спектрального разрешения цели в радиальном направлении.
Далее следует преобразовать полученный массив чисел в форму, удобную для зрительного восприятия. Для этого в выходном устройстве (дисплей, экран) строится квадрат, разделенный на 512 строк и столбцов, представляющий собой графическую матрицу, элементы которой соответствуют элементам двумерно-спектральной матрицы, полученным на выходе двумерного БПФ. Для всех элементов двумерно-спектральной матрицы устанавливается единый уровень порога, равный уровню боковых лепестков наиболее интенсивного спектрального отклика. При наличии в элементе двумерно-спектральной матрицы числа, превышающего пороговый уровень, соответствующий ему элемент графической матрицы заштриховывается. Если же значение элемента ниже порога, то соответствующий ему элемент графической матрицы остается с цветом фона выходного устройства.
На чертеже приведен вариант двумерно-спектральной (а) и соответствующей ей графической (б) матриц для меньшего, чем указано в описании способа количества элементов (уменьшение количества элементов вызвано сложностью исполнения чертежа для матрицы с 512 строками и столбцами, а также желанием упростить зрительное восприятие и анализ). Предполагается, что уровень порога соответствует величине, равной 0,5.
При правильном выборе параметров обработки сигналов и безошибочном функционировании алгоритма двумерного БПФ полученное на выходном устройстве матричное изображение, являющееся двумерным РЛИ, соответствует конфигурации сопровождаемой воздушной цели.
Будучи выведенным для зрительного восприятия, данное двумерное РЛИ, имея более высокие характеристики и являясь более детальным, позволит распознавать воздушные цели различных классов с большой степенью достоверности.
Использованная литература
1. Doppler imaging of target. Заявка Великобритании N 2189962, кл. G 01 S 13/89. Voles Roger; EMI LTD. N 8224903.
2. Стайнберг Б.Д. Формирование радиолокационного изображения самолета в диапазоне СВЧ. ТИИЭР, 1988, т.76, N 12, c.26-46.
3. Зиновьев Ю.С. Пасмуров А.Я. Методы обращенного синтезирования апертур в радиолокации с помощью узкополосных сигналов. Зарубежная радиоэлектроника, 1985, N 3, с.27-39.
4. Трубицын Е.Г. Ермоленко В.П. Распознавание сложных многоточечных воздушных целей в квазиоптической области отражения радиоволн путем анализа частотно-угловых флюктуаций их эффективной поверхности рассеяния. Зарубежная радиоэлектроника, 1992, N 10, с.77-81.
5. Митрофанов Д. Г. Синтез радиолокационного изображения цели методом математического моделирования ее доплеровских портретов. Изв. ВУЗов, сер. "Радиоэлектроника", 1994, N 4, с.72-76.
6. Вишин Г.М. Многочастотная радиолокация. М. Воениздат, 1973, с. 92.
7. Справочник по радиолокации / Под ред. М.И.Сколника. Пер. с англ. М. Сов.радио, 1976, т.1. Основы радиолокации, с.417.
Изобретение относится к радиолокации и может быть использовано в когерентно-импульсной РЛС сопровождения для построения двумерного РЛИ и распознавания по нему воздушной цели. Целью изобретения является повышение точности и детальности построения двумерного РЛИ сопровождаемой воздушной цели, что ведет к повышению достоверности ее распознавания. Для достижения цели изобретения в РЛС сопровождения сантиметрового диапазона предлагается применить импульсное зондирование с линейным изменением несущей частоты от импульса к импульсу в сочетании с алгоритмом инверсного радиолокационного синтезирования апертуры. Предложенный метод обработки отраженных сигналов позволяет получить высокую разрешающую способность одновременно в радиальном и поперечном относительно линии визирования направлениях. В основе метода построения двумерного РЛИ лежит операция двумерного быстрого преобразования Фурье с числом элементов обрабатываемого массива данных 2Nx2N (N≥8). Достоинством способа является высокие качество и детальность формируемого двумерного РЛИ цели, т.е. достижение таких оптических характеристик РЛИ, которые ранее могли быть получены только при помощи сверхширокополосного зондирования, которое ввиду известных трудностей аппаратурной реализации не применяется в парке современных радиолокационных средств. 1 ил.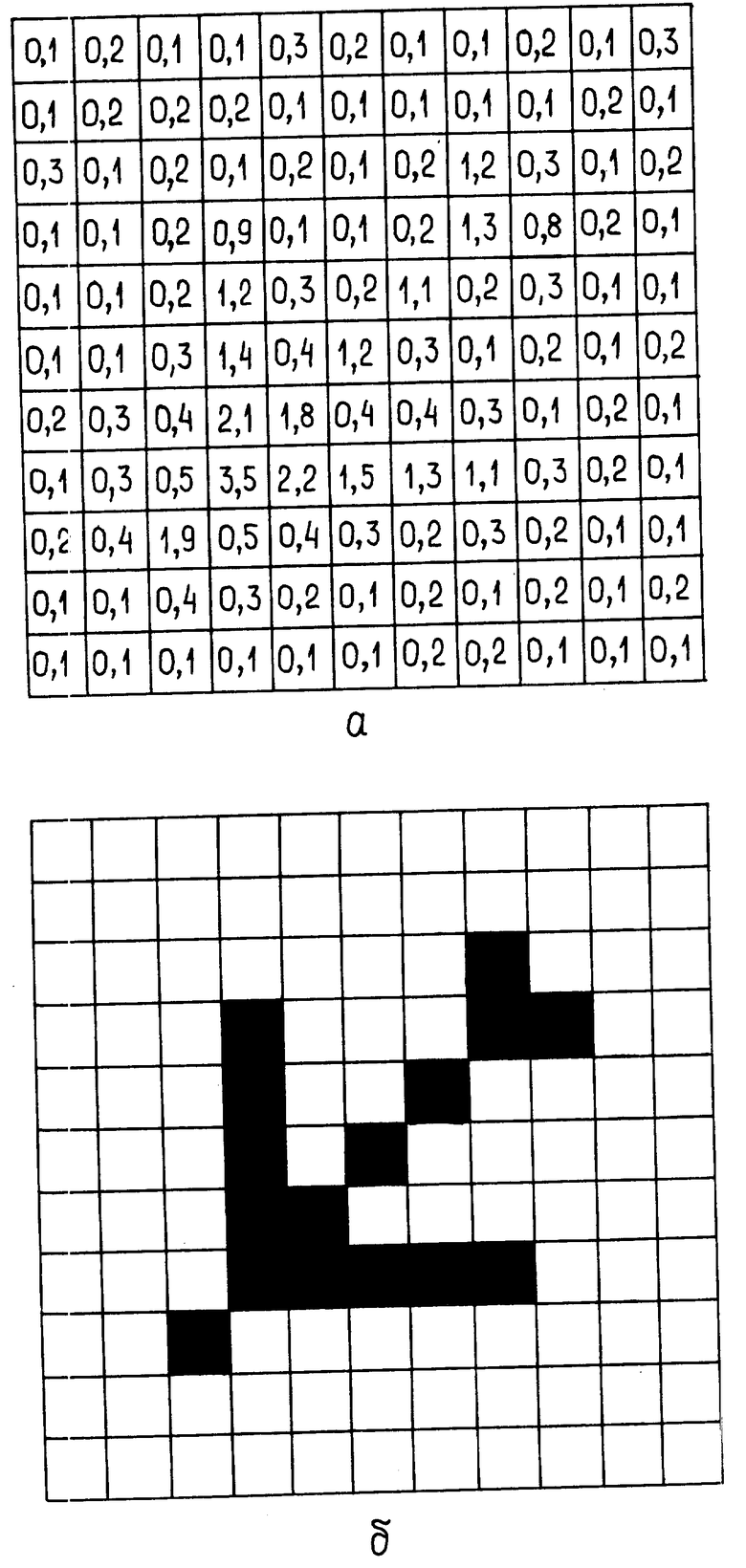
Способ построения двумерного радиолокационного изображения прямолинейно летящей цели при многочастотном узкополосном зондировании, заключающийся в том, что излучают импульсные сигналы, принимают отраженные импульсные сигналы, накапливают их в течение интервала времени
Tc= rλ/(2vΔLsinγ),
где r дальность до цели;
λ - длина волны зондирующего сигнала;
v скорость полета цели;
γ - пространственный ракурс локации цели;
ΔL - линейное разрешение в поперечном относительно линии визирования цели направлении,
отличающийся тем, что при излучении зондирующих импульсных сигналов для каждой последовательности из 2N импульсов (где N 8, 9, 10, 11) изменяют по линейному закону несущую частоту их заполнения от импульса к импульсу в диапазоне частот от fo до fo + Fп е р, где fo несущая частота, Fп е р диапазон, в котором осуществляется перестройка частоты от импульса к импульсу с интервалом Fпер/2N, причем частота повторения импульсов Fи такова, что величина 2N/Fи на порядок меньше времени корреляции траекторных нестабильностей полета целей, составляющего до 25 мс, а накопление последовательностей из 2N отраженных сигналов производят в 2N этапов, рассчитывая время накопления Тс для одного этапа, равное времени инверсного синтезирования, для ΔL = 1 м, а интервалы между этапами накопления по формуле Tc= Tc/2N, составляют матрицу многочастотно-синтезированного рассеяния с 2N строками и 2N столбцами, элементами которой являются амплитуды и фазы отраженных сигналов, данные составленной матрицы многочастотно-синтезированного рассеяния подвергают двумерному быстрому преобразованию Фурье, формируют двумерно-спектральную матрицу многочастотно-синтезированного рассеяния, которую преобразуют в графическое матричное изображение цели, для чего определяют уровень первых боковых лепестков двумерного спектрального отклика наиболее интенсивного рассеивателя поверхности цели, принимают данный уровень за пороговую величину, сравнивают с ней значения элементов двумерно-спектральной матрицы и в случае превышения порога заштриховывают соответствующий элемент в матричном поле размером 2N•2N, а совокупность всех заштрихованных элементов принимают за двумерное радиолокационное изображение цели.
| Стайнберг Б.Д | |||
| Формирование радилокационного изображения самолета в диапазоне СВЧ | |||
| - ТИИЭР, 1988, т | |||
| Аппарат, предназначенный для летания | 0 |
|
SU76A1 |
