Изобретение относится к радиолокации, а именно к радиолокационным системам наблюдения за поверхностью на базе бортовой РЛС, работающей в режиме реального луча с электронным сканированием.
Режим реального луча используется в современных бортовых РЛС при переднем обзоре, например для совершения посадки после предварительного обнаружения посадочной площадки при боковом или переднебоковом обзоре. При этом разрешение РЛС по азимуту оказывается равным эффективной ширине диаграммы направленности антенны (ДНА), что недостаточно для различения малоразмерных объектов на поверхности, и требуется повысить разрешение по азимуту (осуществить обужение ДНА) при переднем обзоре.
Известен способ при боковом или передне боковом обзоре для РЛС, работающих в режиме синтезирования апертуры антенны или доплеровского обужения (Радиолокационные станции с цифровым синтезированием апертуры антенны /В.Н.Антипов, В.Т.Горяинов, А.Н.Кулин и др. Под ред. В.Т.Горяинова. - М.: Радио и связь. 1988, 304 с.), повышение разрешения по азимуту осуществляется следующим образом. При боковом (переднебоковом) обзоре проекция вектора скорости движения объекта-носителя РЛС на направление луча РЛС значительно меньше скорости объекта, что позволяет использовать узкополосную доплеровскую селекцию (фильтрацию) амплитуды отраженного сигнала по частоте (связанной с азимутом), в широком диапазоне частот. В результате осуществляется значительное (в десятки и сотни раз) обужение диаграммы направленности антенны (ДНА), что позволяет на множестве элементов разрешения по дальности (по i-м строкам) и по азимуту (по j-м столбцам) сформировать
матрицу радиолокационного изображения (РЛИ) поверхности, i-, j-e элементы которой представляют амплитуду сигнала, зафиксированного в i-м элементе по дальности для j-го фильтра частот. Однако при переднем обзоре проекция вектора скорости близка к скорости движения объекта-носителя и отраженные сигналы оказываются неразделимыми по доплеровской частоте из-за малого диапазона частот. Таким образом, для обужения ДНА в режиме реального луча при переднем обзоре требуются другие подходы.
Наиболее близким по технической сущности является способ обужения ДНА в режиме реального луча (Родс Д.Р. Введение в моноимпульсную радиолокацию, М: Сов. Радио, 1960, с.86-87), который заключается в следующем.
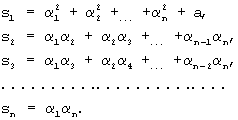
1. Формируются суммарная α с(φ ) и разностная α р(φ ) амплитудные характеристики ДНА в виде зависимостей амплитудных коэффициентов усиления антенны α от азимута φ .
2. Из суммарной амплитудной характеристики α с(φ ) вычитается с определенным коэффициентом разностная характеристика α р(φ ):
α (φ )=α с(φ )-kα p(φ ) или α (φ )=α с(φ )(α с(φ )-kα p(φ )),
где регулировка коэффициента k позволяет контролировать эффективную ширину синтезированной ДНА антенны.
3. Полученная таким образом амплитудная характеристика ДНА α (φ ) имеет меньшую эффективную ширину по сравнению с α с(φ ) и достигается обужение ДНА в 2-3 раза.
Однако такой способ обладает следующими недостатками.
1. Обужение по азимуту в 2-3 раза недостаточно для различения изображений малоразмерных объектов на поверхности, наблюдение которых является главной задачей получения радиолокационных изображений поверхности, так как угловые размеры таких объектов в 10-20 раз меньше ширины ДНА.
2. Обужение по азимуту указанным способом одновременно уменьшает в 2-3 раза область обзора РЛС по азимуту относительно ширины ДНА, что приводит к потере информации.
Технический результат направлен на повышение разрешающей способности (обужение ДНА) по азимуту с одновременным расширением зоны обзора РЛС.
Технический результат предлагаемого технического решения достигается тем, что способ наблюдения за поверхностью на базе бортовой РЛС заключается в формировании матрицы радиолокационного изображения поверхности в режиме реального луча с электронным сканированием и с быстрым электронным переключением (смещением) луча РЛС по азимуту на величину n-й части ширины ДНА и обработки полученных при каждом положении луча амплитуд отраженных сигналов, при этом амплитуды отраженных сигналов на выходе суммарного канала PЛC y1, y2, ... , yn, полученные при n первых положениях луча РЛС в данном i-м элементе разрешения по дальности, суммируют с весами h1, h2, ... , hn и оценивают амплитуду xn отраженного сигнала, n-й части ширины ДНА при первом положении луча:

кроме того, при последующих смещениях луча на n-ю часть ДНА амплитуды отраженных сигналов, полученные при последующих положениях луча, суммируют с теми же весами и оценивают параметры xn+1, xn+2, ... , хN:
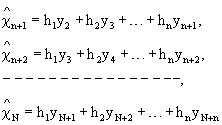
затем оценки А(i,j)=х^j амплитуд xj(j=n, n+1, ... , N), найденные независимо в каждом i-м (i=1, 2, ... , m) элементе разрешения по дальности, располагают в m строк и N-n+1 столбцов и тем самым формируют матрицу радиолокационного изображения поверхности 
Способ осуществляется следующим образом.
Повышение разрешающей способности с расширением зоны обзора РЛС по азимуту и формирование матрицы радиолокационного изображения поверхности в режиме реального луча с электронным сканированием достигается за счет быстрого электронного переключения (смещения) луча РЛС по азимуту на величину n-й части ширины ДНА и обработки полученных при каждом положении луча амплитуд отраженных сигналов РЛС, которая заключается в следующем.
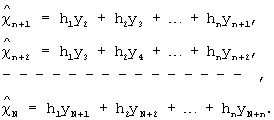
1. Амплитуды отраженных сигналов на выходе суммарного канала РЛС y1, y2, ... , yn, полученные при n первых положениях луча РЛС в данном i-м элементе разрешения по дальности суммируются с весами h1, h2, ... , hn, (расчет весовых коэффициентов описан ниже). Результатом такой обработки является оценка х^n амплитуды xn отраженного сигнала, соответствующего n-й части ДНА при первом положении луча:

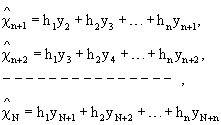
2. При последующих смещениях луча на n-ю часть ДНА амплитуды сигналов, полученные при n последних положениях луча, суммируются с теми же весами, в результате чего последовательно находятся оценки xn+1, xn+2, ... , xn:
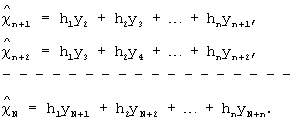
3. Оценки A(i,j)=x^j амплитуд xj(j=n, n+1, ... , N), найденные независимо в каждом i-м (i=1, 2, ... , m) элементе разрешения по дальности, располагают в m строк и N-n+1 столбцов и тем самым формируют матрицу радиолокационного изображения поверхности в виде совокупности амплитуд
 сигналов, отраженных от соответствующих i-, j-x элементов поверхности.
сигналов, отраженных от соответствующих i-, j-x элементов поверхности.
Расчет весовых коэффициентов.
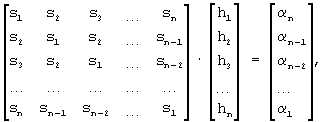
Измерения y1, y2, ... , yn связаны с оцениваемым параметром xn зависимостью 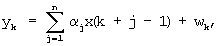
 или в развернутом виде
или в развернутом виде

где n - число делений ДНА; α j - коэффициент, характеризующий среднюю мощность сигнала РЛС в j-й части ДНА; x(k+j-1) - величина, характеризующая поле отражения в j-й части ДНА при k-м положении луча РЛС; wk - случайная ошибка измерения, моделирующая неучтенные составляющие.
Структура оценки  параметра xn имеет вид линейной зависимости от измерений:
параметра xn имеет вид линейной зависимости от измерений:
где hj - весовые коэффициенты; ε n - ошибка оценивания; xn - оцениваемый параметр.
Расчет hj зависит от метода решения задачи. Возможен прямой метод решения системы уравнений (1), когда базисные переменные хn, xn+1...выражаются через свободные х1, ... , xn-1 с периодической установкой значений свободных переменных. Однако такой подход не учитывает ошибок измерения wk и накапливает ошибки установки начальных данных.
Классический метод нахождения оптимальной сглаживающей линейной оценки  параметра хn, определяемой формулой (2), основан на
параметра хn, определяемой формулой (2), основан на
определении весовых коэффициентов  по критерию минимума среднего квадрата ошибки оценивания
по критерию минимума среднего квадрата ошибки оценивания  например (Грузман И.С. Двухэтапное восстановление дефокусированных изображений, Автометрия. 1997. №2. с.93), где М - символ математического ожидания. Минимизация
например (Грузман И.С. Двухэтапное восстановление дефокусированных изображений, Автометрия. 1997. №2. с.93), где М - символ математического ожидания. Минимизация  по hj приводит к системе n линейных уравнений относительно неизвестных,
по hj приводит к системе n линейных уравнений относительно неизвестных,  , которая представляет необходимое условие существования экстремума:
, которая представляет необходимое условие существования экстремума: 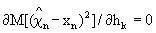 или
или 
 где в соответствии с (2)
где в соответствии с (2)  и система с искомыми
и система с искомыми  , принимает вид
, принимает вид

Коэффициенты системы M[yjyk] и M[xnyk] с учетом модели (1) в случае независимости xj по j, wj по j, а также xj и wj между собой выражаются через коэффициенты α j, средние квадраты оцениваемых параметров M[x Если принять приближенно
Если принять приближенно  , то весовые коэффициенты hj находятся из решения (3) в зависимости только от α j и параметра
, то весовые коэффициенты hj находятся из решения (3) в зависимости только от α j и параметра  . Система (3) принимает вид матричного уравнения S· H=В, или в развернутом виде
. Система (3) принимает вид матричного уравнения S· H=В, или в развернутом виде
Значение параметра α выбирается эмпирически. Для учета возможных корреляционных связей xj по j вводится нормированная корреляционная функция ρ (Δ j), Δ j=|j-j1|, ρ (0)=1, стационарной случайной последовательности {xj}, например: ρ (Δ j)=ехр(-с· |Δ j|), с - параметр. В этом случае весовые коэффициенты Н вычисляются с помощью несложной процедуры, которая программируется на основе (1), (2) с учетом ρ (Δ j).
Предлагаемый способ позволяет в 10-20 раз повысить разрешающую способность РЛС по азимуту в режиме реального луча сохранением области обзора РЛС по азимуту относительно ширины ДНА и сформировать матрицу радиолокационного изображения поверхности в виде совокупности амплитуд A(i,j),  ,
,  сигналов, отраженных от соответствующих i-, j-x элементов поверхности, которая позволяет наблюдать на экране индикатора поверхность и объекты на поверхности в условиях отсутствия оптической видимости, что повышает безопасность полетов и эффективность решения поставленных перед летчиком задач.
сигналов, отраженных от соответствующих i-, j-x элементов поверхности, которая позволяет наблюдать на экране индикатора поверхность и объекты на поверхности в условиях отсутствия оптической видимости, что повышает безопасность полетов и эффективность решения поставленных перед летчиком задач.
Изобретение относится к радиолокации, а именно к радиолокационным системам наблюдения за поверхностью на базе бортовой РЛС, работающей в режиме реального луча с электронным сканированием. Технический результат направлен на повышение разрешающей способности (обужение ДНА) по азимуту с одновременным расширением зоны обзора РЛС, при этом способ наблюдения за поверхностью на базе бортовой РЛС, заключается в формировании матрицы радиолокационного изображения поверхности в режиме реального луча с электронным сканированием и с быстрым электронным переключением (смещением) луча РЛС по азимуту на величину n-й части ширины ДНА и обработки, полученных при каждом положении луча амплитуд отраженных сигналов, при этом амплитуды отраженных сигналов на выходе суммарного канала РЛС y1, у2, ..., уn, полученные при n первых положениях луча РЛС в данном i-м элементе разрешения по дальности суммируют с весами h1, h2, ...,hn и оценивают амплитуду χn отраженного сигнала, соответствующего n-й части ДНА при первом положении луча:  кроме того, при последующих смещениях луча на n- часть ДНА амплитуды отраженных сигналов, полученные при последующих положениях луча, суммируют с теми же весами и оценивают параметры χn+1, χn+2, ..., χN:
кроме того, при последующих смещениях луча на n- часть ДНА амплитуды отраженных сигналов, полученные при последующих положениях луча, суммируют с теми же весами и оценивают параметры χn+1, χn+2, ..., χN:
затем оценки А(ij)=χ^j амплитуд χj(j=n, n+1, ...,N), найденные независимо в каждом i-м (i=1, 2, ..., m) элементе разрешения по дальности, располагают в m строк и N-n+1 столбцов и тем самым формируют матрицу радиолокационного изображения поверхности
амплитуд χj(j=n, n+1, ...,N), найденные независимо в каждом i-м (i=1, 2, ..., m) элементе разрешения по дальности, располагают в m строк и N-n+1 столбцов и тем самым формируют матрицу радиолокационного изображения поверхности  .
.
Способ наблюдения за поверхностью на базе бортовой РЛС, заключающийся в формировании матрицы радиолокационного изображения поверхности в режиме реального луча с электронным сканированием и с быстрым электронным переключением (смещением) луча РЛС по азимуту на величину n-й части ширины ДНА и обработке полученных при каждом положении луча амплитуд отраженных сигналов, при этом амплитуды отраженных сигналов на выходе суммарного канала РЛС y1, у2, ..., уn,полученные при n первых положениях луча РЛС в данном i-м элементе разрешения по дальности, суммируют с весами h1, h2, ..., hn и оценивают амплитуду χn отраженного сигнала, соответствующего n-й части ДНА при первом положении луча:

кроме того, при последующих смещениях луча на n-ю часть ДНА амплитуды отраженных сигналов, полученные при последующих положениях луча, суммируют с теми же весами и оценивают параметры χn+1, χn+2, ..., χN:
затем оценки А(ij)=χ^j амплитуд χj(j=n, n+1, ..., N), найденные независимо в каждом i-м(i=1, 2, ..., m) элементе разрешения по дальности, располагают в m строк и N-n+1 столбцов и тем самым формируют матрицу радиолокационного изображения поверхности
амплитуд χj(j=n, n+1, ..., N), найденные независимо в каждом i-м(i=1, 2, ..., m) элементе разрешения по дальности, располагают в m строк и N-n+1 столбцов и тем самым формируют матрицу радиолокационного изображения поверхности  .
.
| РОДС Д.Р | |||
| Введение в моноимпульсную радиолокацию | |||
| М., Сов | |||
| радио, 1960, с.86, 87 | |||
| СПОСОБ УПРАВЛЕНИЯ ЛУЧОМ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1993 |
|
RU2040082C1 |
| АНТЕННО-ПРИЕМОПЕРЕДАЮЩАЯ СИСТЕМА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2000 |
|
RU2165665C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЗЕМНЫХ ПРЕПЯТСТВИЙ ПРИ ПОЛЕТЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА МАЛОЙ ВЫСОТЕ | 1997 |
|
RU2128846C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ ПОВЕРХНОСТИ ПРИ МАЛОВЫСОТНОМ ПОЛЕТЕ | 2001 |
|
RU2211459C2 |
| US 5610609 А, 11.03.1997 | |||
| ДВУХПОЗИЦИОННЫЙ ТЕРМОРЕГУЛЯТОР | 0 |
|
SU334560A1 |
| DE 3619369 А1, 18.12.1986. | |||

