Изобретение относится к радиолокации, а именно к радиолокационным системам наблюдения за поверхностью и воздушной обстановкой на базе бортовой РЛС, работающей в режиме "реального луча" с электронным сканированием.
Режим реального луча используется в современных бортовых РЛС (БРЛС) при переднем обзоре, например для совершения посадки после предварительного обнаружения посадочной площадки при боковом или переднебоковом обзоре, при наблюдении за поверхностью и высотными объектами по линии маловысотного полета (полет в каньоне или вдоль ЛЭП), при обнаружении воздушных объектов по линии полета.
При наблюдении БРЛС за поверхностью по линии маловысотного полета осуществляется построчное сканирование лучом РЛС заданного сектора пространства путем последовательного смещения луча по азимуту и углу места на ширину диаграммы направленности антенны (ДНА). Четкость радиолокационного изображения (РЛИ) и точность определения угловых координат объектов в срезах дальности при таком способе наблюдения ограничена шириной ДНА. При наблюдении за одиночными воздушными объектами известны методы пеленгации для определения угловых координат (Финкельштейн М.И. Основы радиолокации: Учебник для вузов. М.: Радио и связь, 1983. 536 с.). Однако при наличии группы объектов в одном сечении дальности в пределах одной ДНА (тем более при наблюдении за поверхностью) такие методы не работают. Возникает проблема повышения разрешения РЛС совместно по азимуту и углу места в режиме "реального луча" путем синтезирования новых элементов разрешения с угловыми размерами, меньшими ширины ДНА, в заданных сечениях дальности.
Наиболее близким по технической сущности является способ синтезирования новых элементов разрешения по азимуту при переднем обзоре в режиме "реального луча" (Пат. 2249832 РФ. Способ наблюдения за поверхностью на базе бортовой РЛС. / В.К.Клочко, Г.Н.Колодько, В.И.Мойбенко, А.А.Ермаков (РФ). Заявка №2003126516. Приоритет 02.09.03), который заключается в следующем. Повышение разрешающей способности с расширением зоны обзора РЛС по азимуту и формирование матрицы радиолокационного изображения поверхности в режиме реального луча с электронным сканированием достигается за счет быстрого электронного переключения (смещения) луча РЛС по азимуту на величину n-й части ширины ДНА и обработки полученных при каждом положении луча амплитуд отраженных сигналов РЛС, которая заключается в следующем.
1. Амплитуды отраженных сигналов на выходе суммарного канала РЛС у1, у2,..., уn, полученные при n первых положениях луча РЛС в данном i-м элементе разрешения по дальности суммируются с весами h1, h2,...,hn, которые вычисляются по определенной методике. Результатом такой обработки является оценка  амплитуды xn отраженного сигнала, соответствующего n-й части ДНА при первом положении луча:
амплитуды xn отраженного сигнала, соответствующего n-й части ДНА при первом положении луча:

2. При последующих смещениях луча на n-ю часть ДНА амплитуды сигналов, полученные при n последних положениях луча, суммируются с теми же весами, в результате чего последовательно находятся оценки xn+1, Xn+2,..., XN:
3. Оценки  амплитуд хj (j=n, n+1,...,N), найденные независимо в каждом i-м (i=1, 2,...,М) элементе разрешения по дальности, располагают в М строк и N-n+1 столбцов и тем самым формируют матрицу радиолокационного изображения поверхности в виде совокупности амплитуд A(i, j),
амплитуд хj (j=n, n+1,...,N), найденные независимо в каждом i-м (i=1, 2,...,М) элементе разрешения по дальности, располагают в М строк и N-n+1 столбцов и тем самым формируют матрицу радиолокационного изображения поверхности в виде совокупности амплитуд A(i, j),  ,
,  сигналов, отраженных от соответствующих i-, j-x элементов поверхности.
сигналов, отраженных от соответствующих i-, j-x элементов поверхности.
Однако такой способ обладает следующими недостатками.
1. В указанном способе повышение разрешающей способности (обужение ДНА) достигается только по одной угловой координате - азимуту. Матрица изображения A(i, j), полученная в координатах дальность - азимут, отождествляется с горизонтальным участком поверхности, который при переднем обзоре накрывается конической поверхностью диаграммы направленности антенны (ДНА), при этом i-e строки матрицы изображения соответствуют узким полосам горизонтальной поверхности, отсекаемым сферическими поверхностями постоянного уровня дальности. При наблюдении вертикальных участков поверхности в срезах дальности (или участков, расположенных перпендикулярно к оси симметрии антенны) требуется рассмотрение дополнительной угловой координаты - угла места - и указанный способ оказывается неприменимым.
2. Указанный способ также не применим при наблюдении за группой воздушных объектов, расположенных в одном сечении (элементе разрешения) дальности и в пределах одной ДНА, т.е. не различимых по угловым координатам, причем пространственным элементом разрешения антенны в данном случае является область пространства, образованная сечением конической поверхности ДНА двумя сферическими поверхностями постоянного уровня дальности.
Технический результат направлен на совместное повышение разрешающей способности (обужение ДНА) по азимуту и углу места в заданных сечениях дальности с сохранением области обзора РЛС по азимуту и углу места относительно ширины ДНА.
Технический результат предлагаемого технического решения достигается тем, что при наблюдении за поверхностью и воздушной обстановкой с помощью бортовой РЛС в режиме реального луча с электронным сканированием формируют матрицы радиолокационного изображения поверхности или воздушной обстановки в срезах дальности, при этом за счет быстрого электронного переключения луча РЛС смещают луч по азимуту и углу места соответственно на величину n-й и m-й части ширины ДНА и обрабатывают полученные при каждом положении луча амплитуды отраженных сигналов, при этом амплитуды отраженных сигналов на выходе суммарного канала РЛС y(i, j-n/2),..., y(i, j),..., y(i, j+n/2), полученные при n последовательных положениях луча РЛС по азимуту при данном i=1 положении луча по углу места, суммируют с весами h1(-n/2),..., h1(0),..., h1(n/2) и оценивают суммарную по углу места амплитуду z(i, j), соответствующую центральной n-й части ДНА при j-м положении луча по азимуту:
 ,
,
кроме того, при последующих смещениях луча на n-ю часть ДНА по азимуту амплитуды отраженных сигналов, полученные при n последних положениях луча, суммируют с теми же весами и оценивают последовательно параметры z(i,j) по той же формуле при j=1, 2, 3,..., J, тем самым формируют i-ю строку матрицы промежуточных оценок  , затем положение луча по углу места смещают на m-ю часть соответствующей ширины ДНА, после чего сканирование лучом по азимуту повторяют для j=1, 2,..., J и независимо от i=1 формируют i=2 строку матрицы промежуточных оценок, затем также независимо при последующих смещенных на m-ю часть ДНА положениях луча по углу места i=3,..., I формируют остальные строки матрицы ,
, затем положение луча по углу места смещают на m-ю часть соответствующей ширины ДНА, после чего сканирование лучом по азимуту повторяют для j=1, 2,..., J и независимо от i=1 формируют i=2 строку матрицы промежуточных оценок, затем также независимо при последующих смещенных на m-ю часть ДНА положениях луча по углу места i=3,..., I формируют остальные строки матрицы ,  ,
,  , а далее независимо в каждом j-м столбце полученной матрицы оценки
, а далее независимо в каждом j-м столбце полученной матрицы оценки  ,..., ,...,
,..., ,...,  суммируют с весами h2(-m/2),..., h2(0),..., h2(m/2) и оценивают искомые амплитуды x(i,j):
суммируют с весами h2(-m/2),..., h2(0),..., h2(m/2) и оценивают искомые амплитуды x(i,j):
 ,
,
последовательно для i=1+m/2,..., 2+m/2,..., I-m/2 и тем самым формируют матрицу радиолокационного изображения поверхности или воздушной обстановки  ,
,  , с повышенным разрешением по азимуту и углу места в данном k-м элементе разрешения по дальности.
, с повышенным разрешением по азимуту и углу места в данном k-м элементе разрешения по дальности.
Совокупность изображений x(i, j, k), полученных во всех k-x сечениях дальности  , дает восстановленное трехмерное изображение поверхности или воздушной обстановки в пространственных элементах дискретизации (i, j, k), представляющих синтезированные элементы разрешения, угловые размеры которых в несколько раз меньше ширины ДНА.
, дает восстановленное трехмерное изображение поверхности или воздушной обстановки в пространственных элементах дискретизации (i, j, k), представляющих синтезированные элементы разрешения, угловые размеры которых в несколько раз меньше ширины ДНА.
Способ осуществляется следующим образом.
Повышение разрешающей способности с расширением зоны обзора по азимуту и углу места в данном элементе разрешения дальности и формирование матрицы радиолокационного изображения поверхности или воздушной обстановки в режиме реального луча с электронным сканированием достигается за счет быстрого электронного переключения (смещения) луча РЛС по азимуту и углу места соответственно на величину n-й и m-й части ширины ДНА и обработки полученных при каждом положении луча амплитуд отраженных сигналов РЛС, которая заключается в следующем.
1. Амплитуды отраженных сигналов на выходе суммарного канала РЛС y(i, j-n/2),..., y(i, j),..., y(i, j+n/2), полученные при n последовательных положениях луча РЛС по азимуту при данном i-м положении луча по углу места, суммируются с весами h1(-n/2),..., h1(0),..., h1(n/2) (расчет весовых коэффициентов описан ниже). Результатом такой обработки является промежуточная оценка суммарной по углу места амплитуды z(i, j) отраженного сигнала, соответствующего центральной n-й части ДНА при j-м положении луча по азимуту:
.
2. При последующих смещениях луча на n-ю часть ДНА по азимуту амплитуды отраженных сигналов, полученные при n последних положениях луча, суммируются с теми же весами, в результате чего последовательно находятся промежуточные оценки z(i, j), j=1, 2, 3,..., J по той же формуле.
3. Положение луча по углу места меняется на m-ю часть соответствующей ширины ДНА, после чего сканирование лучом по азимуту повторяется для j=1, 2,..., J и формируется следующая (i+1)-я строка матрицы промежуточных оценок  , затем при последовательно смещенных на m-ю часть ДНА положениях луча по углу места независимо формируются все строки матрицы промежуточных оценок , (i=1, 2,..., I).
, затем при последовательно смещенных на m-ю часть ДНА положениях луча по углу места независимо формируются все строки матрицы промежуточных оценок , (i=1, 2,..., I).
4. Независимо в каждом j-м столбце полученной матрицы (j=1, 2,...,J) промежуточные оценки ,..., ,..., суммируются с весами h2(-m/2),..., h2(0),..., h2(m/2) и оцениваются искомые амплитуды (i, j):
,
и тем самым формируется матрица радиолокационного изображения поверхности или воздушного пространства , ,  в виде совокупности оценок амплитуд сигналов, отраженных от соответствующих i,j-x элементов поверхности или воздушного пространства в данном k-м элементе разрешения по дальности.
в виде совокупности оценок амплитуд сигналов, отраженных от соответствующих i,j-x элементов поверхности или воздушного пространства в данном k-м элементе разрешения по дальности.
5. Совокупность изображений , полученных во всех k-x сечениях дальности  , дает восстановленное трехмерное изображение поверхности или воздушной обстановки
, дает восстановленное трехмерное изображение поверхности или воздушной обстановки  в пространственных элементах дискретизации (i, j, k), представляющих синтезированные элементы разрешения, угловые размеры которых в несколько раз меньше ширины ДНА.
в пространственных элементах дискретизации (i, j, k), представляющих синтезированные элементы разрешения, угловые размеры которых в несколько раз меньше ширины ДНА.
Расчет весовых коэффициентов.
При повышении разрешения по азимуту справедливы следующие рассуждения. Амплитуда сигнала y(j) на выходе суммарного измерительного канала РЛС для j-го положения луча РЛС при фиксированном i-м положении луча по азимуту в k-м элементе разрешения по дальности после некоторых преобразований подчинена линейной модели

аналогичной модели смазывания радиолокационного изображения (РЛИ) по строке, где α(l) - аппаратные коэффициенты ДНА; l - целое число; x(j) - амплитуда сигнала поля отражения в j-м элементе дискретизации, подлежащая восстановлению (оцениванию) по результатам интегральных (суммарных) наблюдений у(j); р(j) - случайная центрированная помеха с дисперсией σP 2. Модель (1) можно записать, изменив нумерацию, в виде

Тогда для первых N измерений (нечетное число N≥n) выражение (2) представляет систему N уравнений с N+n-1 неизвестными и N помехами:
или в матричной форме:

Для моделей (1)-(4) разработаны алгоритмы нахождения оценок  искомых амплитуд поля отражения Х по критерию минимума среднего квадрата ошибки оценивания
искомых амплитуд поля отражения Х по критерию минимума среднего квадрата ошибки оценивания  или минимума квадрата нормы
или минимума квадрата нормы  с учетом корреляционных свойств полей х(j) и y(j). Такие алгоритмы линейны относительно измерений y(j) и имеют или конечную память:
с учетом корреляционных свойств полей х(j) и y(j). Такие алгоритмы линейны относительно измерений y(j) и имеют или конечную память:

где h(j) весовые коэффициенты, вычисляемые заранее, или рекуррентную структуру (Клочко В.К., Чураков Е.П., Фатьянов С.О. Калмановский алгоритм восстановления смазанного радиолокационного изображения. // Известия вузов. Радиоэлектроника. 2004. Том 47. № 9-10. с.54-59).
Для повышения точности оценивания в работе (Клочко В.К. Повышение разрешающей способности РЛС по данным суммарного и разностного каналов. // Вестник РГРТА. 2004.) предлагается дополнительно использовать данные второго (разностного) канала РЛС. При этом число изменений (размерность вектора Y) удваивается и превышает число оцениваемых параметров (2N>N+n-1, N≥n), что позволяет находить оценки искомых параметров Х методом максимального правдоподобия решения системы 2N уравнений типа (3) с N+n-1 неизвестными. В матричной форме минимизация функции F=(Y-А)T(Y-А) по приводит к оценкам регуляризованного метода наименьших квадратов (РМНК):

где δ - параметр регуляризации, необходимый для обращения плохо обусловленной матрицы АT А; Е - единичная матрица; H=(ATA)-1AT - матрица весовых коэффициентов. При обращении АTА удобно использовать рекуррентную процедуру:

где аk - k-я строка матрицы А коэффициентов ДНА; Т - символ транспонирования.
Оценка  (j) представляет амплитуду сигнала отражения в n-й части ДНА (элементе дискретизации), соответствующей центру j-го положения луча РЛС (синтезированного элемента разрешения по азимуту). При вычислении (j) используется центральная строка матрицы Н, соответствующая минимуму дисперсии ошибки оценивания ковариационной матрицы КX=(АTА)-1σ2 P. Алгоритм оценивания представляет линейную комбинацию измерений, взятых с заранее просчитанными весовыми коэффициентами, аналогично алгоритму (5).
(j) представляет амплитуду сигнала отражения в n-й части ДНА (элементе дискретизации), соответствующей центру j-го положения луча РЛС (синтезированного элемента разрешения по азимуту). При вычислении (j) используется центральная строка матрицы Н, соответствующая минимуму дисперсии ошибки оценивания ковариационной матрицы КX=(АTА)-1σ2 P. Алгоритм оценивания представляет линейную комбинацию измерений, взятых с заранее просчитанными весовыми коэффициентами, аналогично алгоритму (5).
Как показывает моделирование, РМНК-оценки (6) могут быть использованы и для модели измерений (4) одного суммарного канала РЛС, при этом алгоритм оценивания имеет вид (5), где весовые коэффициенты h(l) находятся по методике (6), (7) для вектора Y размерности N.
При совместном повышении разрешения по азимуту и углу места номер i определяет положение луча РЛС по углу места, номер j по-прежнему обозначает номер положения луча по азимуту, k - номер элемента разрешения по дальности.
Амплитуда y(i, j) сигнала на выходе суммарного канала в k-м фиксированном элементе разрешения дальности при i, j-м положении луча по азимуту и углу места представляет сумму амплитуд x{i+k, j+l) сигналов поля отражения, взятых с коэффициентами ДНА α(k, l) по всем k, l-м элементам дискретизации в пределах ДНА, с учетом помехи p(i, j):

Модель (8) аналогична модели пространственного смазывания РЛИ по строкам и столбцам. Коэффициенты α(k, l) ДНА суммарного канала представляют функцию с разделенными переменными: α(k,l)=α1(k)·α2(l), соответственно модель измерения (8) представляется в виде

Восстановление параметров поля отражения x(i, j) в этом случае можно свести к следующей двухэтапной процедуре, каждый этап которой аналогичен повышению разрешения по азимуту.
1. Вначале восстанавливается поле отражения x(i, j) в каждой i-й строке матрицы РЛИ y(i, j), что практически осуществляется в реальном времени в процессе построчного сканирования лучом РЛС:

, N≥n. Это приводит к промежуточным оценкам , .
2. Затем восстанавливается поле отражения в каждом j-м столбце матрицы , полученной после сканирования всей зоны обзора:

где ε(i, j) - ошибка оценивания z(i, j); h1(l) и h2(k) - весовые коэффициенты, которые находятся по методике (6), (7).
Двухэтапная обработка позволяет использовать также рекуррентные алгоритмы оценивания x(i, j). В свернутом виде оценка представляет следующий линейный алгоритм:
 (12)
(12)
Алгоритм (10)-(11) или (12) при наблюдении за воздушными объектами реализуется в тех элементах разрешения по дальности, в которых зафиксирован отраженный сигнал. При наблюдении за поверхностью восстанавливается трехмерное изображение по совокупности всех k-x срезов дальности в области обзора. Пространственные элементы дискретизации (i, j, k) представляют синтезированные элементы разрешения, угловые размеры которых в несколько раз меньше ширины ДНА. Практически пересчитывается в матрицу амплитуд в координатах угол места - азимут и матрицу третьих координат (дальности) d(i, j).
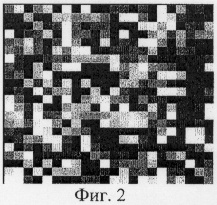
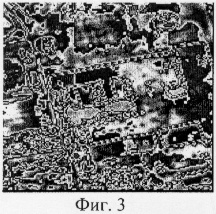
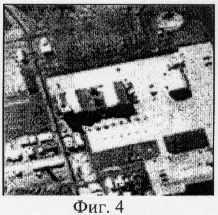
На фиг.1-4 иллюстрируется результат работы алгоритма (10), (11) при восстановлении двумерного изображения поверхности, где фиг.1 дает искомое изображение поверхности, фиг.2 - наблюдаемое изображение при перемещении ДНА по строке и столбцу на ширину n=m=7, фиг.3 - смазанное вдоль строк и столбцов изображение при последовательном смещении ДНА на 1/7 ее ширины, фиг.4 - восстановленное изображение с помощью алгоритма (10), (11) при N=М=9. Размер матрицы 150×150, максимальная амплитуда 250. СКО помехи σP=10. С увеличением σP (σP>10) становятся заметными спекл-шумы на изображении, которые подавляются осреднением в последовательности кадров РЛИ (например, по методике Клочко В.К. Пространственно-временная обработка информации бортовой РЛС при получении трехмерных изображений поверхности. // Радиотехника. 2004. № 6. с.3-11). Аппаратные коэффициенты α(k, l) задавались экспоненциальной функцией с квадратичным показателем степени.
Предлагаемый способ позволяет в 5-7 раз повысить разрешающую способность РЛС по азимуту и углу места в сечениях дальности в режиме "реального луча" с сохранением области обзора РЛС по азимуту и углу места относительно ширины ДНА и сформировать матрицу радиолокационного изображения поверхности или воздушной обстановки в виде совокупности амплитуд ,  , сигналов, отраженных от соответствующих i, j-x элементов угломерного пространства в k-x элементах разрешения дальности, которая позволяет наблюдать на экране индикатора поверхность и объекты на поверхности или объекты в воздушном пространстве в условиях отсутствия оптической видимости, что повышает безопасность полетов и эффективность решения поставленных перед летчиком задач.
, сигналов, отраженных от соответствующих i, j-x элементов угломерного пространства в k-x элементах разрешения дальности, которая позволяет наблюдать на экране индикатора поверхность и объекты на поверхности или объекты в воздушном пространстве в условиях отсутствия оптической видимости, что повышает безопасность полетов и эффективность решения поставленных перед летчиком задач.
Изобретение относится к радиолокации, а именно к радиолокационным системам наблюдения за поверхностью и воздушной обстановкой на базе бортовой РЛС, работающей в режиме "реального луча" с электронным сканированием. Технический результат направлен на совместное повышение разрешающей способности (обужение ДНА) по азимуту и углу места в заданных сечениях дальности с сохранением области обзора РЛС по азимуту и углу места относительно ширины ДНА. Способ наблюдения за поверхностью и воздушной обстановкой заключается в формировании матрицы радиолокационного изображения поверхности или воздушной обстановки в средах дальности, при этом за счет быстрого электронного переключения луча РЛС смещают луч по азимуту и углу места соответственно на величину n-й и m-й части ширины ДНА и обрабатывают полученные при каждом положении луча амплитуды отраженных сигналов путем их суммирования с весами, вычисленными заранее по определенной методике. 4 ил.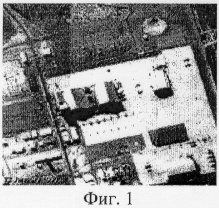
Способ наблюдения за поверхностью и воздушной обстановкой на базе бортовой РЛС, основанный на работе в режиме реального луча с электронным сканированием, заключающийся в формировании матрицы радиолокационного изображения поверхности или воздушной обстановки в срезах дальности, при этом за счет быстрого электронного переключения луча РЛС смещают луч по азимуту и углу места соответственно на величину n-й и m-й части ширины ДНА и обрабатывают полученные при каждом положении луча амплитуды отраженных сигналов, при этом амплитуды отраженных сигналов на выходе суммарного канала РЛС y(i,j-n/2),..., y(i,j),..., y(i,j+n/2), полученные при n последовательных положениях луча РЛС по азимуту при данном i=1 положении луча по углу места, суммируют с весами h1(-n/2),..., h1(0),..., h1(n/2) и оценивают суммарную по углу места амплитуду z(i,j), соответствующую центральной n-й части ДНА при j-м положении луча по азимуту

кроме того, при последующих смещениях луча на n-ю часть ДНА по азимуту амплитуды отраженных сигналов, полученные при n последних положениях луча, суммируют с теми же весами и оценивают последовательно параметры  по той же формуле при j=1, 2, 3,..., J, тем самым формируют i-ю строку матрицы промежуточных оценок
по той же формуле при j=1, 2, 3,..., J, тем самым формируют i-ю строку матрицы промежуточных оценок  отличающийся тем, что затем положение луча по углу места смещают на m-ю часть соответствующей ширины ДНА, после чего сканирование лучом по азимуту повторяют для j=1, 2,..., J и независимо от i=1 формируют i=2 строку матрицы промежуточных оценок, затем также независимо при последующих смещенных на m-ю часть ДНА положениях луча по углу места i=3,..., I формируют остальные строки матрицы
отличающийся тем, что затем положение луча по углу места смещают на m-ю часть соответствующей ширины ДНА, после чего сканирование лучом по азимуту повторяют для j=1, 2,..., J и независимо от i=1 формируют i=2 строку матрицы промежуточных оценок, затем также независимо при последующих смещенных на m-ю часть ДНА положениях луча по углу места i=3,..., I формируют остальные строки матрицы 

 а далее независимо в каждом j-м столбце полученной матрицы
а далее независимо в каждом j-м столбце полученной матрицы  оценки
оценки 

 суммируют с весами h2(-m/2),..., h2(0),..., h2(m/2) и оценивают искомые амплитуды x(i, j)
суммируют с весами h2(-m/2),..., h2(0),..., h2(m/2) и оценивают искомые амплитуды x(i, j)

последовательно для i=1+m/2,..., 2+m/2,..., I-m/2 и тем самым формируют матрицу радиолокационного изображения поверхности или воздушной обстановки 

 с повышенным разрешением по азимуту и углу места в данном k-м элементе разрешения по дальности.
с повышенным разрешением по азимуту и углу места в данном k-м элементе разрешения по дальности.
| СПОСОБ НАБЛЮДЕНИЯ ЗА ПОВЕРХНОСТЬЮ НА БАЗЕ БОРТОВОЙ РЛС | 2003 |
|
RU2249832C1 |
| СПОСОБ ОБЗОРА ВОЗДУШНОГО ПРОСТРАНСТВА РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ С ПЛОСКИМИ ЛУЧАМИ ДИАГРАММ НАПРАВЛЕННОСТИ АНТЕНН | 1996 |
|
RU2117313C1 |
| US 5847673 A, 08.12.1998 | |||
| WO 2005036099 A1, 21.04.2005 | |||
| EP 0975990 A1, 02.02.2000. | |||

