Изобретение относится к области энергетических систем космических аппаратов (КА) и способам их управления.
Известны способы энергообеспечения КА, реализуемые энергетическими системами, основанные на работе первичных источников энергии (см. [1], стр.13-17).
В качестве первичных используются внешние и бортовые источники разных видов энергии. Каждый из видов трансформируется напрямую или через промежуточные виды в электрическую энергию. Основным видом внешнего источника энергии является солнечное излучение, которое наиболее часто используется в двух формах: световой и тепловой.
Электрическая энергия на борту КА генерируется либо путем трансформации энергии внешних источников, запасы которой можно считать безграничными, либо путем трансформации энергии, накопленной в бортовых источниках, запасы которой ограничены возможностями устройств накопителей и преобразователей разных видов энергии. При этом не предусмотрено накопление бортовыми источниками энергии, получаемой от внешних источников.
Таким образом, энергообеспечение КА должно производиться в первом случае за счет постоянного прихода энергии от внешних источников или во втором случае - за счет автономных бортовых энергетических устройств (например, на основе радиоизотопных генераторов, (см. [1], стр.39-41), обладающих необходимыми запасами энергии для продолжительного выполнения программы полета.
Как известно, в настоящее время номинальные существования подавляющего числа КА на орбите исчисляются годами. В таком случае, указанный подход к способу управления энергообеспечением КА, реализуемому энергетическими системами, не всегда приемлем в основном по двум причинам. Первая причина заключается в том, что периодически аппараты не могут получать энергию от солнечного излучения. Это обусловлено как условиями их полета (наличием "теневых" участков орбиты), так и возможностью потери ориентации на Солнце основных устройств, трансформирующих солнечную в электрическую энергию.
Вторая причина заключается в том, что создание и эксплуатация мощных бортовых источников энергии альтернативных солнечной (прежде всего с использованием ядерной энергии) сопряжены с целым рядом трудностей при производстве, хранении, транспортировке, подготовке к запуску и т.п.
Поэтому для большинства КА предпочтение отдается способам управления энергообеспечением, реализуемым энергетическими системами, пополняющим свои запасы от внешних космических источников энергии и прежде всего использующих энергию солнечного излучения.
В указанных способах бортовые источники энергии (БИЭ) периодически пополняют свои запасы за счет трансформации энергии внешних источников. Далее энергия источников трансформируется в электрическую энергию.
Типичным примером энергетических систем, реализующих способ управления энергообеспечением КА, является система электроснабжения, представленная в [2], на стр. 189-195. Способ управления энергообеспечением КА с помощью представленной системы принимается за прототип.
Способ-прототип содержит в себе определение зарядно-разрядных характеристик i-x бортовых источников энергии КА, где i=1, 2, 3,..., I - число БИЭ. В качестве указанных источников используются электрохимические аккумуляторы. При этом определяются значения номинальных верхних Wvi и нижних Wni уровней заряженности источников энергии. Для заряда бортовых источников, а также для энергообеспечения КА в целом используется световая форма энергии солнечного излучения. Указанная энергия трансформируется (преобразуется) в фотоэлектрических преобразователях (ФЭП) солнечных батарей (СБ) в электрическую энергию.
Заряд бортовых источников производится по результатам контроля измеренных значений уровня заряженности бортовых источников Wei(t). При этом поддержание уровня заряженности бортовых источников в пределах допустимых диапазонов значений [Wni, Wvi] производится за счет избытка электроэнергии на борту КА, трансформируемой из световой энергии.
Осуществляется также постоянный контроль потребления электроэнергии на борту КА в процессе выполнения программы полета в текущие моменты времени t. И в случае превышения расхода электроэнергии над ее приходом бортовые источники энергии подключают к кабельной сети электроснабжения КА для расхода энергии бортовых источников.
Основной недостаток указанного способа управления энергообеспечением КА заключен в том, что управление бортовыми источниками энергии производится не планомерно как с точки зрения самих источников, так и их востребованности для выполнения программы полета.
Каждому бортовому источнику энергии соответствует участок заряда и саморазряда при отсутствии подключенной внешней нагрузки. Указанные зарядно-разрядные циклы могут быть разнесены по времени таким образом, что в определенные текущие моменты времени t заряд бортовых источников будет суммироваться либо по максимальным, либо по минимальным значениям. Чаще всего он будет иметь промежуточное значение между указанными экстремумами. Каким образом указанный заряд согласуется с выполнением программы полета в способе-прототипе, не указано. Из анализа работы прототипа следует, что часть бортовых источников электроэнергии, выделенных в аварийный резерв, может быть задействована для питания бортовой нагрузки после разряда основных бортовых источников. Однако при этом никакими действиями не предусмотрено до задействования аварийного резерва максимальное использование основных источников энергии. По существу подключение указанного резервного источника необходимо рассматривать как нештатную ситуацию на борту КА. И, если не учитывать полный отказ основных бортовых источников энергии, то нарушение указанного энергобаланса происходит лишь из-за непродуманного управления энергообеспечением КА.
Как правило, в указанном случае резервные источники обладают меньшим ресурсом по числу зарядно-разрядных циклов. Следовательно, непродуманные задействования их под бортовую нагрузку могут сократить время пребывания КА на орбите. Особенно это характерно для пилотируемых транспортных кораблей.
В предлагаемом изобретении решается задача повышения надежности энергообеспечения КА за счет планомерного управления энергоресурсами, заложенными в бортовых источниках энергии КА, аккумулирующих энергию внешних источников. При этом указанная планомерность учитывает востребованность бортовых источников для выполнения программы полета.
Для достижения технического результата в способе управления энергообеспечением космического аппарата, содержащем определение зарядно-разрядных характеристик i-x бортовых источников энергии космического аппарата, включая значения номинальных верхних Wvi и нижних Wni уровней заряженности указанных источников энергии, где i=1, 2, 3,...,I - число бортовых источников энергии, трансформацию энергии внешних источников, измерение уровней заряженности i-x бортовых источников в текущие моменты времени t Wei(t), поддержание уровня заряженности бортовых источников в пределах допустимых диапазонов значений [Wni, Wvi] за счет трансформации энергии внешних источников, контроль потребляемой энергии на борту космического аппарата в процессе выполнения программы полета и расход энергии бортовых источников при превышении потребляемой энергией на борту космического аппарата трансформированной энергии от внешних источников, дополнительно определяют интервалы полетного времени для поддержания вероятностного и детерминированного уровней заряженности энергией i-x бортовых источников, в случае перехода на поддержание вероятностного уровня заряженности бортовых источников энергии космического аппарата при превышении потребляемой энергией значений трансформированной энергии от внешних источников определяют количество энергии в бортовых источниках, необходимое для выполнения программы полета космического аппарата Wa(t), эквивалентное количеству трансформированной электрической энергии, далее на интервале программы полета указанного поддержания вероятностного уровня заряженности бортовых источников энергии измеряют величины скоростей заряда  бортовых источников энергии, а также величины скоростей саморазряда бортовых источников энергии
бортовых источников энергии, а также величины скоростей саморазряда бортовых источников энергии  по указанным измеренным значениям в пределах диапазона значений [Wni, Wvi], определяют интервалы времени заряда (tzi, tri) и саморазряда (tri, tzi) i-x бортовых источников, где tzi, tri - моменты времени начала заряда и начала разряда i-x бортовых источников энергии соответственно, определяют смещение начала заряда i-x бортовых источников Δti, обеспечивающее необходимое количество энергии бортовых источников Wa(t), и производят поддержание уровня заряженности бортовых источников с момента времени tzi+Δti на интервалах (tzi, tri) и (tri, tzi) до выполнения условия
по указанным измеренным значениям в пределах диапазона значений [Wni, Wvi], определяют интервалы времени заряда (tzi, tri) и саморазряда (tri, tzi) i-x бортовых источников, где tzi, tri - моменты времени начала заряда и начала разряда i-x бортовых источников энергии соответственно, определяют смещение начала заряда i-x бортовых источников Δti, обеспечивающее необходимое количество энергии бортовых источников Wa(t), и производят поддержание уровня заряженности бортовых источников с момента времени tzi+Δti на интервалах (tzi, tri) и (tri, tzi) до выполнения условия

где We(tzi)∈[Wni,Wvi] - значение текущей заряженности i-ro бортового источника Wei(t) энергии на момент времени tzi,
а в случае превышения потребляемой энергии на борту космического аппарата над трансформированной от внешних источников на интервале поддержания вероятностного уровня заряженности регулируют расход энергии из i-x бортовых источников в соответствии с потребностью энергии на выполнение программы полета космического аппарата и далее, когда энергия, трансформируемая от внешних источников превысит потребляемую энергию на борту космического аппарата, производят заряд i-x бортовых источников энергии до значений Wvi и поддерживают их уровни заряженности на интервалах времени (tzi, tri) и (tri, tzi) с момента времени tzi+Δti до выполнения условия (1), а также в процессе выполнения программы полета космического аппарата прогнозируют интервалы времени (t0, tк) поддержания детерминированного уровня заряженности бортовых источников энергии, на которых потребляемая энергия превышает трансформируемую от внешних источников, определяют величину ΔW(t0) превышения потребляемой энергией трансформируемой энергии для указанных интервалов, определяют значение Wa(tк) на момент времени окончания интервала (t0, tк) и до начала прогнозируемого интервала t0 производят детерминированный заряд бортовых источников на интервалах (tzi, tri) и (tri, tzi) с момента времени tzi+Δti до выполнения условия

далее в процессе выполнения программы полета на интервале (t0, tк) регулируют потребление энергии из i-x бортовых источников в соответствии с количеством энергии, необходимым для выполнения программы полета космического аппарата, при этом обеспечивают превышение разрядной энергией, получаемой от бортовых источников, энергии, потребляемой на борту космического аппарата, а после окончания прогнозируемого интервала, начиная с момента времени tк, производят заряд i-x бортовых источников до получения значений Wvi с последующим поддержанием вероятностного уровня заряженности указанных бортовых источников до выполнения условия (1) и по мере необходимости переходят на указанный выше детерминированный заряд бортовых источников энергии до выполнения условия (2), далее чередуют вышеуказанным образом поддержание вероятностного и детерминированного уровней заряженности i-x бортовых источников энергии.
Технический результат во вновь разрабатываемом способе управления энергообеспечением КА направлен на планомерное использование энергоресурсов бортовых источников энергии КА с учетом проведения их зарядно-разрядных циклов и востребованности для выполнения программы полета.
Для объяснения технической сущности предлагаемого изобретения в описание введены фиг.1 - 6.
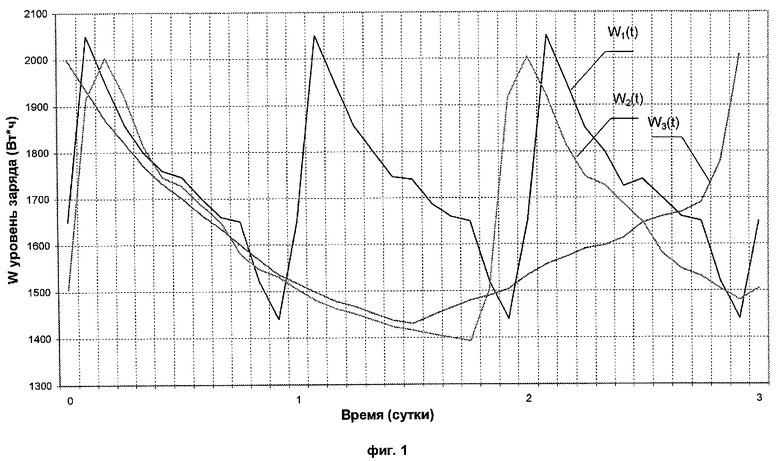
На фиг.1 представлены графики исходных зарядно-разрядных циклограмм бортовых источников разных видов энергии.
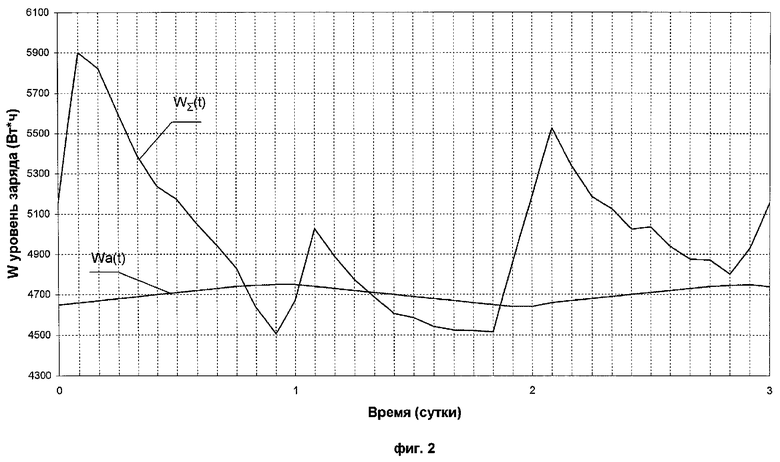
На фиг.2 представлен график суммы исходных зарядно-разрядных циклограмм бортовых источников разных видов энергии, а также график вероятностного уровня заряженности бортовых источников энергии КА.
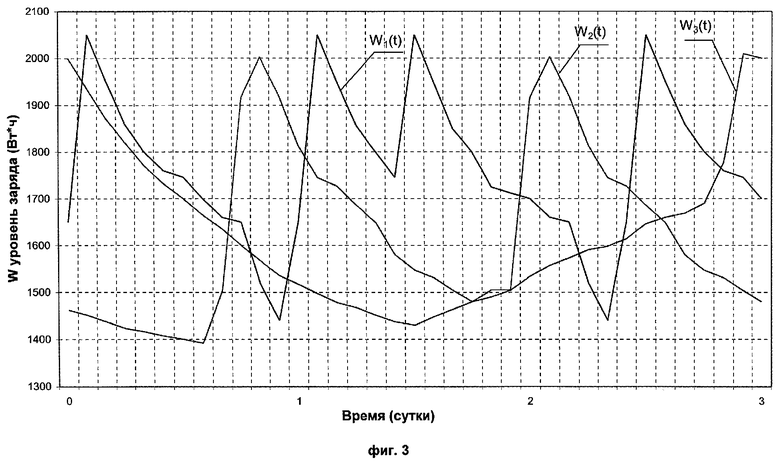
На фиг.3 представлены графики управляемых зарядно-разрядных циклов бортовых источников разных видов энергии, обеспечивающих текущий вероятностный уровень заряженности бортовых источников энергии КА.
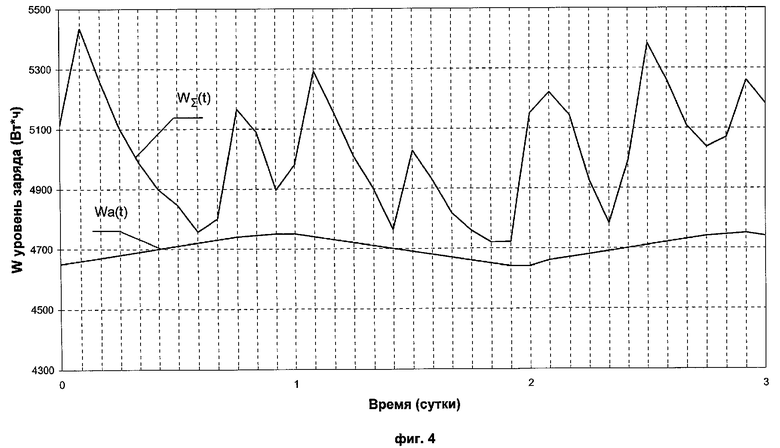
На фиг.4 представлен график суммы управляемых зарядно-разрядных циклов бортовых источников разных видов энергии, обеспечивающих текущий вероятностный уровень заряженности бортовых источников энергии КА.
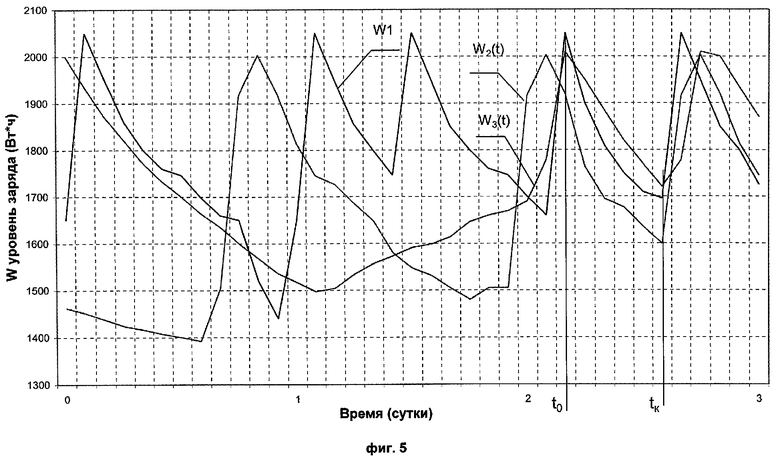
На фиг.5 представлены графики управляемых зарядно-разрядных циклов бортовых источников разных видов энергии, обеспечивающих детерминированный уровень заряженности бортовых источников энергии КА.
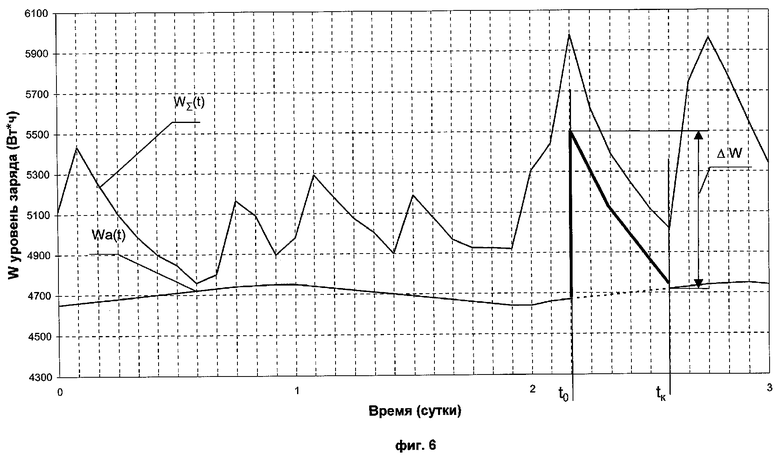
На фиг.6 представлен график суммы управляемых зарядно-разрядных циклов бортовых источников разных видов энергии, обеспечивающих текущий вероятностный и детерминированный уровни заряженности бортовых источников энергии КА.
Рассмотрим для примера большой КА класса орбитальных станций, имеющий на борту три вида источников: электрохимические аккумуляторы, инерционные аккумуляторы, тепловые аккумуляторы, объединенные с приемниками и преобразователями.
На фиг.1 представлены зарядно-разрядные циклограммы указанных бортовых источников энергии КА, при этом введены обозначения:
W1(t) - график изменения уровня заряженности электрохимической никель-водородной аккумуляторной батареи, см. [3, 4];
W2(t) - график изменения уровня заряженности инерционного аккумулятора, см. [5, 6];
W3(t) - график изменения уровня заряженности теплового аккумулятора, объединенного с приемником и преобразователем, см. [6] стр.51-56.
По оси абсцисс отложено полетное время КА, в сутках. По оси ординат - уровень заряда бортовых источников энергии, эквивалентный количеству трансформированной электрической энергии, отдаваемой под нагрузку с учетом коэффициентов полезного действия источников (ηi), Вт·час.
На фиг.2 представлен в том же масштабе полетного времени суммарный график изменения уровней заряженности

где i=1, 2, 3 - число бортовых источников энергии.
Кроме этого, представлен график Wa(t) - количества энергии в i-x бортовых источниках, необходимого для выполнения программы полета КА в случае перехода на поддержание вероятностного уровня заряженности бортовых источников энергии КА, рассчитанный с учетом ηi.
Энергообеспечение КА, при выполнении им программы полета, производится за счет трансформации энергии внешних источников (см.[1]), являющихся одновременно первичными источниками энергии. В таком случае уровень заряженности бортовых источников является аварийным и должен быть использован при нарушении технологической цепочки в энергетической системе КА в процессе указанной трансформации энергии (см.[1], стр.282-285).
Например, в случае потери ориентации СБ на Солнце (см.[7]) необходимо некоторое время производить управление КА и его поворотными СБ с использованием энергии бортовых источников питания. Очевидно, что указанный процесс управления последует за контролем потребления энергии на борту КА. При превышении потребляемой энергией на борту КА трансформированной энергии от внешних источников, зафиксированном в результате контроля, производится указанный переход на работу от бортовых источников энергии.
Известно, что контроль работы систем по правилу его реализации можно разделить на вероятностный и детерминированный (см.[8], стр.16). Поскольку контроль всегда предшествует началу указанного управления энергообеспечением КА, то уровни заряженности энергией i-x бортовых источников также можно разделить по интервалам полетного времени на вероятностные и детерминированные. Далее определяем интервалы полетного времени, на которых поддерживаем указанные уровни заряженности.
Поскольку нерасчетная потеря ориентации КА и другие отказы в его энергетической системе, приводящие к нарушению трансформации энергии от внешних источников носят случайный характер, то в свою очередь контроль и переход на последующее управление энергообеспечением КА от бортовых источников носят вероятностный характер.
Несмотря на вероятность реализуемого правила управления, его событийность прогнозируется через резервное время. В качестве резервного принимается время, в течение которого обеспечивается энергообеспечение КА от бортовых источников энергии до восстановления основной схемы энергообеспечения КА от внешних источников энергии.
Физический смысл значений Wa(t) заключается именно в обеспечении указанного резервного времени существования КА.
Исходя из динамических характеристик аппарата, возможностей его динамического и кинематического контуров управления движением вокруг центра масс, различных изменяющихся факторов космического полета, конструктивных особенностей КА и его СБ и т.д., указанный запас энергии можно определить.
На фиг.2 в виде графика Wa(t) показан указанный потребный текущий запас уровня заряженности бортовых источников энергии, обеспечивающий резервное время существования КА по энергообеспечению.
Если сравнить значение графиков W∑(t) и Wa(t), то можно обратить внимание на то, что, с одной стороны, имеются "провалы" суммарного уровня заряженности бортовых источников ниже значений Wa(t), а с другой стороны - значительное превышение потребностей в Wa(t) запасами энергии в бортовых источниках.
Как уже отмечалось, график W∑(t) получен путем суммирования соответствующих ему по времени значений Wi(t). При этом графики Wi(t) представлены в виде полных зарядно-разрядных циклов бортовых источников различных видов энергии.
На фиг.1 представлены номинальные технологические циклы, по которым наиболее целесообразно проводить эксплуатацию бортовых источников энергии.
Из фиг.2 также можно установить, что в целом запасов энергии в бортовых источниках достаточно, чтобы обеспечить текущие значения Wa(t). Об этом можно судить по интегральной оценке запасов энергии (площадь над кривой графика Wa(t) и ее возможного расходования (площадь под кривой того же графика). При этом суммарная площадь над графиком между значениями W∑(t) и Wa(t) в несколько раз больше площади под графиком.
Однако, как видно из того же графика, существуют интервалы полетного времени КА, на которых не обеспечивается вероятностный уровень заряженности бортовых источников энергии, превышающий Wa(t).
Для обеспечения указанного уровня проведем нижеследующие действия.
Измерим величины скоростей заряда  и саморазряда
и саморазряда  бортовых источников энергии.
бортовых источников энергии.
Например, для никель-водородной аккумуляторной батареи (НВАБ) (см. [4]) наработанная электрическая энергия определяется по датчикам давления водорода и температуре корпуса:

где Рн - давление в НВАБ в начале разряда, кгс/см2;
Рк - давление в НВАБ в конце разряда, кгс/см2;
Тн - температура корпуса в начале разряда, °С,
к - коэффициент, учитывающий сжимаемость и расход Н2 на реакции.
Текущее значение уровня заряженности W1(t) при заряде определяется по давлению P(t) и температуре T(t) по выражению

где T(t) - текущее значение температуры на корпусе батареи, при этом Т(t)∈[Тн, Тв] - допустимый отрезок температур, Р(t)∈[Рн, Рв] - допустимый отрезок давлений внутри корпуса НВАБ.
Скорости заряда и саморазряда в данном случае определяются через измеренные значения давлений P(t) и температуры T(t), по которым определяется в соответствии с (5) W1(t), далее определяется  и
и  через градиенты изменения уровня заряженности
через градиенты изменения уровня заряженности



При этом градиент роста заряженности (grad W1>0) может дополняться наличием признака заряда батареи (например, наличием зарядного тока от устройства заряда), а градиент падения заряженности (grad W1<0) может дополняться признаками разряда батареи (например, отсутствием зарядного тока и наличием разрядного тока).
Последнее дополнение требуется для распознавания случаев, связанных с наличием нештатной работы указанных батарей (например, при разгерметизации корпуса батареи и т.д.).
Для определения значений W2(t) измеряемым параметром будут обороты ротора (маховика) инерционного аккумулятора, а для W3(t) основным измеряемым параметром может быть температура теплоаккумулирующих материалов.
Однако независимо от разного вида аккумуляторов суть приведенных рассуждений не меняется.
Как видно из графиков, приведенных на фиг.1,  и
и  могут иметь разные значения. Однако по смене знака градиента можно определить интервалы времени заряда (tzi, tri) и саморазряда (tri, tzi) i-x бортовых источников, где tzi, tri - моменты времени начала заряда и начала разряда i-x бортовых источников энергии, соответствующие моментам времени смены знаков grad Wi с минуса на плюс и с плюса на минус.
могут иметь разные значения. Однако по смене знака градиента можно определить интервалы времени заряда (tzi, tri) и саморазряда (tri, tzi) i-x бортовых источников, где tzi, tri - моменты времени начала заряда и начала разряда i-x бортовых источников энергии, соответствующие моментам времени смены знаков grad Wi с минуса на плюс и с плюса на минус.
Указанные определения интервалов производим в пределах диапазона значений [Wni, Wvi].
Для того чтобы добиться постоянного выполнения условия

необходимо произвести дозаряд источников на тех интервалах времени, на которых оно не выполняется.
На фиг.3 показано, каким образом, изменив времена заряда tz2 в полном зарядно-разрядном цикле второго источника и прервав полный интервал разряда первого источника в определенный момент времени tzi, удается добиться того, чтобы условие (9) выполнялось на всем полетном интервале, см. фиг.4. Наглядность примера оформим математическим условием для конечного i-го числа бортовых источников

где We(tzi)∈[Wni, Wvi] - значение текущей заряженности i-го бортового источника Wei(t) энергии на момент времени tzi.
В соответствии с условиями эксплуатации каждый из i-x бортовых источников может находиться либо в процессе заряда, либо в процессе саморазряда. Первая половина левой части неравенства (1) отражает зарядный процесс, а вторая - разрядный процесс. При отсутствии зарядного процесса значения We(tzi) и  zi приравниваем нулю для соответствующих им i-x источников, а при отсутствии саморазряда приравниваем нулю значения Wvi и
zi приравниваем нулю для соответствующих им i-x источников, а при отсутствии саморазряда приравниваем нулю значения Wvi и  ri(t) для соответствующих им i-x источников.
ri(t) для соответствующих им i-x источников.
Как видно из фиг.3, смещением моментов времени tz1 и tz2 на величину Δti удалось обеспечить выполнение условия (1). Таким образом, представлен графический метод определения моментов времени tzi+Δt. Для аналогичных целей можно предложить итерационный метод, где в качестве переменных выбираем разные значения для Δti, добиваясь в конечном результате выполнения условия (1).
Следуя основному решающему правилу управления вероятностным уровнем заряженности бортовых источников, в любой текущий момент времени может быть осуществлен переход в режим энергообеспечения КА от указанных источников. После перехода бортовая токовая нагрузка в полном объеме или частично обеспечивается от бортовых источников энергии. Для энергообеспечения КА в рамках текущих значений величин Wa(t) реальная бортовая нагрузка должна соответствовать тем расчетным значениям, по которым был определен потребный запас электроэнергии.
Например, при Wa(t)=4700 Вт·час и резервном времени в 1 час, при номинальном напряжении в 28 В, средний ток нагрузки должен быть не более 168 А. На указанную нагрузку рассчитывается работа бортовых регуляторов тока. При помощи их регулируем расход энергии из i-x бортовых источников в соответствии с потребностью энергии на выполнение программы полета КА.
После восстановления штатной схемы энергоснабжения КА от первичных источников энергии и превышения энергией, трансформируемой от внешних источников потребляемой энергии на борту КА, производим заряд i-x бортовых источников энергии до значений Wvi. В процессе заряда указанных источников и дальнейшего их саморазряда на интервалах времени (tzi, tri) и (tri, tzi) в определенные моменты времени tzi производим дозаряд источников до выполнения условия (1).
Поскольку зарядные характеристики бортовых источников всегда отличаются друг от друга, то произвести одновременно их заряд до Wvi не удается, см. фиг.1, процесс заряда одних источников до максимального верхнего уровня может сопровождаться прерыванием саморазряда в моменты времени tzi других источников, см. фиг.3.
Приведение к исходному верхнему уровню заряженности источников позволяет, с одной стороны, получить определенные начальные условия для последующего вероятностного управления уровнями заряженности бортовых источников и, с другой стороны, как можно быстрее восстановить запас бортовой энергии, обеспечивающий резервное время по энергообеспечению КА.
В описанном случае по мере расхода бортовых запасов энергии для КА ситуация становится все более критической. Поэтому возможность быстрого восстановления (время восстановления Wa(t)) указанных запасов является одним из критериев, характеризующих отказоустойчивость энергетической системы КА.
С целью повышения указанной отказоустойчивости производим заряд бортовых источников сразу после их работы под нагрузкой.
В процессе полета КА возможны ситуации, когда энергии, получаемой от первичных источников, может не хватать для выполнения программы полета. На таких энергонапряженных интервалах времени (t0, tк) допускается дополнительное расходование энергии бортовых источников. Указанные интервалы времени прогнозируются по известному списку включаемой бортовой аппаратуры и электронагревателей, а также по продолжительности их работы. При этом номинальный ток указанных потребителей - величина, как правило, известная. Программа полета планово устанавливает как состав потребителей и циклограмм их работы, так и состояние первичных источников энергии на борту КА (см. [9]). Таким образом, по току нагрузки и току, например, от ФЭП СБ можно рассчитать текущий энергобаланс на борту КА. Отрицательные значения указанного энергобаланса и определяют интервал (t0, tк).
Для покрытия недостатка в энергии необходимо производить детерминированный заряд бортовых источников с тем, чтобы создать запасы энергии на борту КА, обеспечивающие прохождение интервала (t0, tк) и сохраняющие при этом запас энергии для указанного ранее резервного времени.
До начала интервала (t0, tк) к моменту времени t0 определяем величину ΔW(t0) превышения потребляемой энергии над трансформированной
ΔW(t0)=ΔW′(t0)/η
где In(t), Is(t) - токи нагрузки и ФЭП СБ соответственно, А;
U - напряжение на шинах системы электроснабжения КА, В;
 - среднее значение коэффициента полезного действия i-x источников.
- среднее значение коэффициента полезного действия i-x источников.
Определяем также значение Wa(tк) на момент времени tк окончания указанного интервала.
Далее производим детерминированный заряд бортовых источников на интервалах (tzi, tri) и (tri, tzi) с началом в определенные моменты времени tzi до выполнения условия

Определяем текущие значения мощности токовой нагрузки на i-e бортовые источники энергии на интервале (t0, tк):

и суммарную мощность от i-x бортовых источников энергии (N∑):
где Ni - мощность i-ro бортового источника, Вт.
Далее необходимо обеспечить условия энергопотребления (через величину тока нагрузки), при которых разрядная энергия от бортовых источников всегда обеспечивала бы текущую потребность в энергии на борту КА. Указанное условие можно записать в виде
Выполнение условия (13) обеспечивается путем распределения токовой нагрузки на интервале (t0, tк) за счет подбора состава потребителей электроэнергии.
На фиг.5 показаны графики детерминированного заряда рассматриваемых трех i-x источников к моменту времени t0; разряда источников от бортовой токовой нагрузки на интервале (t0, tк) и последующего их заряда.
На фиг.6 показаны: график уровня заряженности бортовых источников Wa(t) с учетом потребного запаса энергии ΔW(t0) и прогнозируемого расхода указанного запаса на интервале (t0, tк); график W∑(t) с учетом детерминированного заряда i-x бортовых источников к моменту времени to, разряда источников от токовой нагрузки с последующим зарядом источников.
Как видно из указанных графиков, путем выбора начала зарядов в определенные моменты времени tzi удалось обеспечить выполнение условия (2). Кроме того, на момент времени tк текущий суммарный уровень заряженности W∑(tк) превышает значение Wa(tк), что гарантирует энергообеспечение при выполнении программы полета в момент времени перехода на вероятностное управление разрядом i-x бортовых источников сразу по окончании интервала (t0, tк).
В процессе энергообеспечения КА на указанном интервале мощность токовой нагрузки от бортовых потребителей должна соответствовать мощности расчетного расхода энергии бортовых источников. В таком случае гарантируется плановое выполнение программы полета с расчетным энергообеспечением аппарата. Для этого регулируем расход энергии из i-x бортовых источников путем подключения-отключения части бортовой токовой нагрузки в соответствии с программой полета КА.
На фиг.6, на интервале (t0, tк), представлен примерно одинаковый вид прогнозного участка графика Wa(t) и разрядного участка графика W∑(t). Это подчеркивает то, что градиент разряда бортовых источников, характеризующий изменение их текущей мощности, должен соответствовать текущей мощности токовой нагрузки бортовых потребителей. Пересечение указанных графиков на интервале (t0, tк) будет характеризовать пограничный случай, ниже которого график W∑(t) находиться не может, так как энергообеспечение КА в таких случаях в полном объеме производиться не будет.
Вышеуказанным образом представлено графическое решение задачи по выполнению условия (13).
По окончании указанного интервала, начиная с момента времени tк, производим заряд i-x бортовых источников до получения значений Wvi.
Указанный заряд позволяет повысить отказоустойчивость КА по энергообеспечению от вторичных источников питания (увеличить запас "резервного времени"), а также подготовить начальные условия для последующего поддержания вероятностного уровня заряженности бортовых источников.
Далее продолжаем полет КА с поддержанием вероятностного уровня заряженности бортовых источников энергии и, по мере необходимости, переходим на детерминированный заряд указанных источников энергии до выполнения условия (2).
В зависимости от особенностей программы полета могут производиться чередования вероятностного и детерминированного уровней заряженности i-x бортовых источников энергии.
Например, при наличии "теневых" интервалов орбиты, на которых аппарат затеняется от Солнца Землей, определен постоянный детерминированный заряд бортовых источников энергии для интервала (t0, tк). Так как солнечные батареи перестают вырабатывать энергию на теневых интервалах орбиты, то до "входа КА в тень" каждый раз необходимо производить дозаряд его бортовых источников энергии. Далее следует энергообеспечение КА от указанных источников и т.д.
Реализацию предложенного способа можно осуществить, например, при помощи средств наземного контура управления (НКУ), бортового контура управления (БКУ) и системы электроснабжения (СЭС).
На фиг.7 представлена функциональная блок-схема элементов, обеспечивающих формирование, передачу, прием, преобразование и исполнение управляющих воздействий необходимых для реализации данного способа, где:
1 - наземный комплекс управления, формирование и передачу на борт управляющих воздействий (НКУ),
2 - бортовая аппаратура служебного канала управления (БАСКУ),
3 - бортовая цифровая вычислительная система (БЦВС),
4 - система бортовых измерений (СБИ),
5 - система управления бортовой аппаратурой (СУБА),
6 - система электроснабжения (СЭС).
Полученные в СБИ 4 данные измерений текущих параметров КА поступают в БЦВС 3, где преобразуются в массивы контрольно-измерительной информации и через средства БАСКУ 2 предаются в НКУ 1.
НКУ 1 обеспечивает прием контрольно-измерительной информации с борта космического аппарата и отображение ее в необходимой для анализа форме.
Полученная таким образом контрольно-измерительная информация служит основой для определения зарядно-разрядных характеристик i-x бортовых источников энергии, определения необходимого количества энергии в бортовых источниках Wa(t) для выполнения программы полета космического аппарата, определения интервалов времени заряда (tzi, tri) и саморазряда (tzi, tri), определения смещения начала заряда i-x бортовых источников Δti.
Далее на НКУ, в соответствии с определенными ранее параметрами, формируются управляющие воздействия, необходимые для поддержания вероятностного уровня заряженности бортовых источников с момента времени tzi+Δti.
Сформированные на НКУ 1 управляющие воздействия через средства БАСКУ 2 поступают в БЦВС 3, где преобразуются в команды управления, соответствующие алгоритмам управления СЭС 6. Полученные таким образом команды управления из БЦВС 3 через СУБА 5 поступают в СЭС 6, включающую в себя i-e бортовые источники и элементы управления бортовыми источниками, которые реализуют команды, полученные из БЦВС 3. Сформированные на НКУ 1 управляющие воздействия также могут быть переданы, минуя БЦВС 3, по цепи НКУ 1 - БАСКУ 2 - СУБА 5 - СЭС 6, в случае, если не требуется их преобразование в команды, соответствующие алгоритмам СЭС 6.
Оценка произошедших изменений в зарядно-разрядных циклах i-x бортовых источников, а также выполнение условия (1) производится на основе контрольно-измерительной информации на НКУ 1, полученной с СБИ 4 по цепи СБИ 4 - БЦВС - БАСКУ 2 - НКУ 1.
В случае определения на основе полученной контрольно-измерительной информации превышения потребляемой энергии на борту КА над трансформированной от внешних источников на интервале поддержания вероятностного уровня заряженности на НКУ 1 формируются управляющие воздействия. Эти воздействия необходимы для регулирования уровней заряженности источников в соответствии с определенной ранее потребностью энергии на выполнение программы полета КА. Сформированные на НКУ 1 управляющие воздействия преобразуются и поступают в СЭС 6 по цепи НКУ 1 - БАСКУ 2 - БЦВС 3 - СУБА 5 - СЭС 6. Оценка произведенных изменений расхода энергии из i-x бортовых источников производится на основе контрольно-измерительной информации на НКУ 1, полученной с СБИ 4 по цепи СБИ 4 - БЦВС 3 - БАСКУ 2 - НКУ 1.
Для поддержания детерминированного уровня заряженности i-x бортовых источников на основе полученной из СБИ 4 по цепи СБИ 4 - БЦВС 3 - БАСКУ 2 - НКУ 1 контрольно-измерительной информации прогнозируются интервалы времени (t0, tк) поддержания детерминированного уровня заряженности бортовых источников энергии. Определяется величина превышения потребляемой энергии над трансформируемой для указанных интервалов ΔW(t0). С помощью средств НКУ 1 по определенным ранее параметрам формируются управляющие воздействия, необходимые для проведения заряда до начала интервала (t0, tк), регулировки расхода энергии из i-x бортовых источников энергии на интервале (t0, tк), заряда i-x бортовых источников энергии после окончания интервала (t0, tк).
Оценка произошедших изменений в зарядно-разрядных циклах i-x бортовых источниках, а также выполнение условия (2) производится на основе контрольно-измерительной информации на НКУ 1, полученной с СБИ 4 по цепи СБИ 4 - БЦВС 3 - БАСКУ 2 - НКУ 1.
Положительный эффект от предлагаемого способа управления энергообеспечением КА прежде всего направлен на повышение отказоустойчивости энергетических систем по энергообеспечению КА.
Плановое управление зарядом бортовых источников энергии позволяет исключить случаи недостатка запасов энергии для восстановления штатных схем энергоснабжения КА от первичных внешних источников энергии. При этом постоянно обеспечивается необходимый аварийный запас энергии с учетом возможных различных регламентных работ, сопровождаемых отключением бортовых источников, аварийных ситуаций на борту аппарата и других случаев, связанных с подключением (отключением) указанных источников для энергообеспечения КА.
Детерминированное управление уровнем заряженности бортовых источников позволяет значительно расширить возможности проведения различных работ на борту аппарата за счет дополнительного расходования (кроме энергии, получаемой от первичных источников) энергии, получаемой от бортовых источников. Увеличиваются также возможности в проведении динамических операций при управлении движением вокруг центра масс аппарата. Это объясняется тем, что могут допускаться к выполнению режимы ориентации, при которых не обеспечивается, например, ориентация СБ на Солнце. При этом во всех указанных случаях гарантируется наличие резервного запаса бортовой энергии, позволяющего обеспечить управление КА в нештатных ситуациях.
Использование предлагаемого способа позволяет также сохранить ресурс аварийных источников электроэнергии (в случае наличия таких на борту), предназначенных для ограниченного использования. Тем самым можно продлить срок эксплуатации КА в целом.
Литература
1. А.А.Куландин, С.В.Тимашев, В.П.Иванов. Энергетические системы космических аппаратов. М.: Машиностроение, 1979 г.
2. А.С.Елисеев. Техника космических полетов. М.: Машиностроение, 1983 г.
3. Б.И.Центер, Н.Ю.Лызлов. Металл-водородные электрохимические системы. Л.: "Химия", Ленинградское отделение. 1989.
4. Батарея с металлогазовыми элементами. Патент РФ 2118873.
5. Аккумулирующее энергию устройство с маховиком в магнитном подвесе, патент США 6019319.
6. Управление электрической системой и системой управления пространственным положением искусственного спутника. Патент США 6439510.
7. Autonomous spacecraft safing with reaction wheels. Patent US 6089508.
8. Контроль функционирования больших систем. /Под редакцией Г.Г.Шибанова. М.: Машиностроение. 1977 г.
9. В.Г.Кравец, В.Е.Любинский. Основы управления космическими полетами. М.: Машиностроение. 1983.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭНЕРГООБЕСПЕЧЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2005 |
|
RU2291819C2 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2015 |
|
RU2621933C2 |
| СПОСОБ ОРИЕНТАЦИИ И АВТОНОМНОЙ НАВИГАЦИИ КОСМИЧЕСКОГО АППАРАТА СИСТЕМЫ МОНИТОРИНГА ЗЕМЛИ И ОКОЛОЗЕМНОГО ПРОСТРАНСТВА | 2008 |
|
RU2376213C1 |
| СПОСОБ КОНТРОЛЯ ЭФФЕКТИВНОСТИ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2712358C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВРЕМЕНИ ПРОВЕДЕНИЯ ЗАРЯДА ГЕРМЕТИЧНОЙ МЕТАЛЛ-ВОДОРОДНОЙ БАТАРЕИ | 2002 |
|
RU2216827C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭНЕРГООБЕСПЕЧЕНИЕМ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2411163C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ПОДДЕРЖАНИИ ЗАДАННОЙ ОРИЕНТАЦИИ С ПОМОЩЬЮ РЕАКТИВНЫХ МАХОВИКОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2281232C2 |
| Способ управления космическим аппаратом | 2020 |
|
RU2735655C1 |
| СПОСОБ ОПЕРАТИВНОЙ СИНХРОНИЗАЦИИ МЕР ВРЕМЕНИ И ЧАСТОТЫ, РАЗМЕЩЕННЫХ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 1995 |
|
RU2109315C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПОТРЕБЛЕНИЕМ ОРБИТАЛЬНОЙ ГРУППИРОВКИ КОСМИЧЕСКИХ АППАРАТОВ С ЭЛЕКТРОРЕАКТИВНЫМИ ДВИГАТЕЛЯМИ | 2005 |
|
RU2304070C2 |
Изобретение относится к энергообеспечению бортовых систем космических аппаратов. Предлагаемый способ включает определение зарядно-разрядных характеристик бортовых источников (БИ) энергии, трансформацию энергии внешних источников, поддержание уровня заряженности БИ за счет энергии внешних источников и расход энергии БИ при превышении потребляемой энергией, трансформированной от внешних источников. При этом определяют интервалы полетного времени для поддержания вероятностного и детерминированного уровней заряженности БИ. В вероятностном случае, при превышении потребляемой энергией значений трансформированной энергии от внешних источников определяют количество энергии в БИ, необходимое для выполнения программы полета. Далее определяют интервалы времени заряда и саморазряда БИ, а также смещение начала заряда БИ, обеспечивающее необходимое количество энергии БИ. Поддерживают уровень заряженности БИ на указанных интервалах их заряда-разряда, регулируя расход энергии БИ в соответствии с программой полета. Когда энергия, трансформируемая от внешних источников, превысит потребляемую, производят заряд БИ и поддержание их уровней заряженности на интервалах заряда-разряда. Прогнозируют интервалы времени поддержания детерминированного уровня заряженности БИ, на которых потребляемая энергия превышает трансформируемую от внешних источников, и до их начала производят детерминированный заряд БИ на указанных интервалах заряда-разряда. Затем регулируют потребление энергии БИ в соответствии с программой полета, обеспечивая превышение разрядной энергией БИ энергии, потребляемой на борту. По окончании прогнозируемого интервала производят заряд БИ для последующего поддержания вероятностного уровня заряженности БИ. По мере надобности переходят на указанный выше детерминированный заряд БИ и далее чередуют поддержание вероятностного и детерминированного уровней заряженности БИ. Технический результат изобретения направлен на повышение надежности энергообеспечения КА за счет более планомерного использования внутренних и внешних энергоресурсов. 7 ил.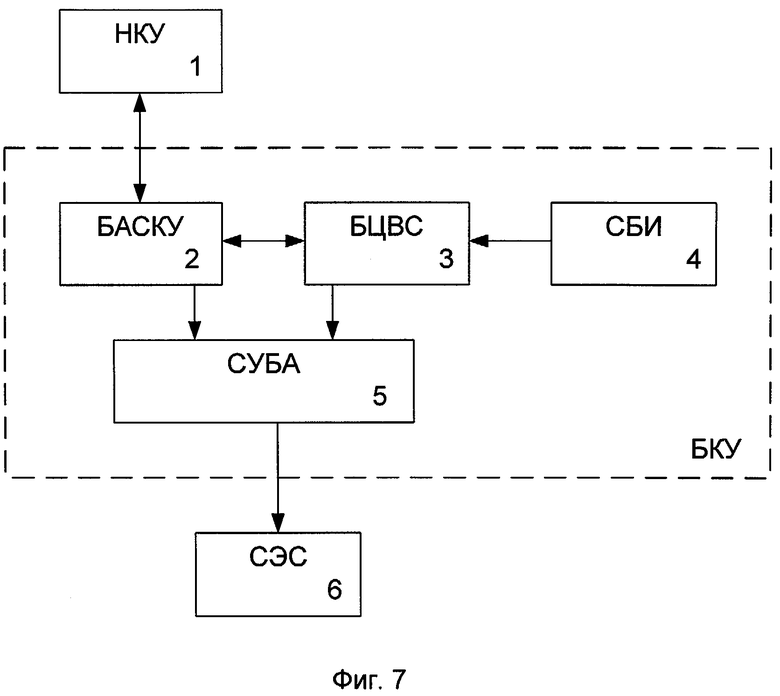
Способ управления энергообеспечением космического аппарата, включающий определение зарядно-разрядных характеристик i-x бортовых источников энергии космического аппарата, включая значения номинальных верхних Wvi и нижних Wni уровней заряженности указанных источников энергии, где i=1, 2, 3,..., I - число бортовых источников энергии, трансформацию энергии внешних источников, измерение уровней заряженности Wei(t) i-x бортовых источников в текущие моменты времени t, поддержание уровня заряженности бортовых источников в пределах допустимых диапазонов значений [Wni, Wvi] за счет трансформации энергии внешних источников, контроль потребляемой энергии на борту космического аппарата в процессе выполнения программы полета и расход энергии бортовых источников при превышении потребляемой энергией на борту космического аппарата трансформированной энергии от внешних источников, отличающийся тем, что определяют интервалы полетного времени для поддержания вероятностного и детерминированного уровней заряженности энергией i-x бортовых источников, в случае перехода на поддержание вероятностного уровня заряженности бортовых источников энергии космического аппарата при превышении потребляемой энергией значений трансформированной энергии от внешних источников определяют количество энергии в бортовых источниках, необходимое для выполнения программы полета космического аппарата Wa(t), эквивалентное количеству трансформированной электрической энергии, далее на интервале программы полета указанного поддержания вероятностного уровня заряженности бортовых источников энергии измеряют величины скоростей заряда  бортовых источников энергии, а также величины скоростей саморазряда бортовых источников энергии
бортовых источников энергии, а также величины скоростей саморазряда бортовых источников энергии  no указанным измеренным значениям в пределах диапазона значений [Wni, Wvi] определяют интервалы времени заряда (tzi, tri) и саморазряда (tri, tzi) i-x бортовых источников, где tzi, tri - моменты времени начала заряда и начала разряда i-x бортовых источников энергии соответственно, определяют смещение начала заряда i-x бортовых источников Δti, обеспечивающее необходимое количество энергии бортовых источников Wa(t), и производят поддержание уровня заряженности бортовых источников с момента времени tzi+Δti на интервалах (tzi, tri) и (tri, tzi) до выполнения условия
no указанным измеренным значениям в пределах диапазона значений [Wni, Wvi] определяют интервалы времени заряда (tzi, tri) и саморазряда (tri, tzi) i-x бортовых источников, где tzi, tri - моменты времени начала заряда и начала разряда i-x бортовых источников энергии соответственно, определяют смещение начала заряда i-x бортовых источников Δti, обеспечивающее необходимое количество энергии бортовых источников Wa(t), и производят поддержание уровня заряженности бортовых источников с момента времени tzi+Δti на интервалах (tzi, tri) и (tri, tzi) до выполнения условия

где We(tzi)∈[Wni, Wvi] - значение текущей заряженности i-ro бортового источника Wei(t) энергии на момент времени tzi, а в случае превышения потребляемой энергией на борту космического аппарата трансформированной от внешних источников на интервале поддержания вероятностного уровня заряженности, регулируют расход энергии из i-x бортовых источников в соответствии с потребностью в энергии на выполнение программы полета космического аппарата, и далее, когда энергия, трансформируемая от внешних источников, превысит потребляемую энергию на борту космического аппарата, производят заряд i-x бортовых источников энергии до значений Wvi и поддерживают их уровни заряженности на интервалах времени (tzi, tri) и (tri, tzi) с момента времени tzi+Δti до выполнения условия (1), а также в процессе выполнения программы полета космического аппарата прогнозируют интервалы времени (t0, tк) поддержания детерминированного уровня заряженности бортовых источников энергии, на которых потребляемая энергия превышает трансформируемую от внешних источников, определяют величину ΔW(t0) превышения потребляемой энергией трансформируемой энергии для указанных интервалов, определяют значение Wa(tк) на момент времени окончания интервала (t0, tк) и до начала прогнозируемого интервала t0 производят детерминированный заряд бортовых источников на интервалах (tzi, tri) и (tri, tzi) с момента времени tzi+Δti до выполнения условия

далее в процессе выполнения программы полета на интервале (t0, tк) регулируют потребление энергии из i-x бортовых источников в соответствии с количеством энергии, необходимым для выполнения программы полета космического аппарата, при этом обеспечивают превышение разрядной энергией, получаемой от бортовых источников, энергии, потребляемой на борту космического аппарата, а после окончания прогнозируемого интервала начиная с момента времени tк производят заряд i-x бортовых источников до получения значений Wvi с последующим поддержанием вероятностного уровня заряженности указанных бортовых источников до выполнения условия (1) и по мере необходимости переходят на указанный выше детерминированный заряд бортовых источников энергии до выполнения условия (2), далее чередуют вышеуказанным образом поддержание вероятностного и детерминированного уровней заряженности i-x бортовых источников энергии.
| ЕЛИСЕЕВ А.С | |||
| Техника космических полетов | |||
| - М.: Машиностроение, 1983, с.189-195 | |||
| US 4707979 А, 24.11.1987 | |||
| КОСМИЧЕСКИЙ АППАРАТ БЛОЧНО-МОДУЛЬНОГО ИСПОЛНЕНИЯ | 1995 |
|
RU2092398C1 |
| СИСТЕМА ТЕРМОРЕГУЛИРОВАНИЯ | 1999 |
|
RU2168690C2 |
| ЭНЕРГЕТИЧЕСКАЯ СИСТЕМА (ВАРИАНТЫ) | 1997 |
|
RU2192356C2 |

