Изобретения относятся к космической технике и принадлежат к системам управления угловым движением космических аппаратов (КА).
Известны способы управления при поддержании заданной ориентации связанного физического базиса КА относительно опорных физических базисов с использованием реактивных двигателей (РД) (см. [1], стр.111-120) в качестве исполнительных органов. При этом режимы построения и поддержания заданной ориентации на определенных интервалах полетного времени (t0, tk) производятся по датчикам внешней информации КА - солнечного, звездного, датчиков ориентации на Землю и других (см. [2]). В качестве параметров для ориентации КА относительно опорных физических базисов, используемых в указанных датчиках, используются углы астроориентации. При использовании в управлении КА бескарданных систем, предполагающих наличие на борту измерителей угловых скоростей, в качестве параметров для управления угловым движением КА используются кинематические параметры - углы ориентации и угловые скорости КА. Все указанные рi - параметры, где i - 1, 2, 3...I, относятся к разряду измеряемых, и по ним строится управление угловым движением на фазовой плоскости КА, например, по принципу трех плоских независимых вращений (см. [1], стр.179). В качестве аналога рассмотрим способ управления КА с помощью реактивных исполнительных органов при выполнении режимов ориентации (см. [3]), включающий управление при помощи РД и силовых гироскопов (СГ). Указанный способ заключается в том, что в процессе поддержания заданного режима ориентации измеряют текущее значение вектора кинетического момента в системе СГ  и вектора абсолютной угловой скорости КА
и вектора абсолютной угловой скорости КА  , определяют по ним суммарный вектор кинетического момента
, определяют по ним суммарный вектор кинетического момента  и момент времени насыщения системы СГ, определяют изменения
и момент времени насыщения системы СГ, определяют изменения  суммарного вектора кинетического момента, требуемого для обеспечения завершения заданного режима ориентации и разгрузку СГ при помощи РД. При этом в качестве СГ для представленной заявки рассматриваем одностепенные СГ = реактивные маховики. При этом точность управления угловым движением, а, следовательно, и точность поддержания заданной ориентации, напрямую зависит от величины конечного вращательного импульса, прикладываемого к корпусу аппарата. Моменты управления КА при использовании РД в качестве исполнительных органов системы ориентации меняются скачкообразно (см. [1], стр.72). Поэтому фазовые диаграммы установившихся колебаний КА могут иметь изменяющиеся значения углов в колебательных циклах, превышающие заданную точность для режима поддержания ориентации. Указанное превышение может быть характерным и для угловых скоростей КА.
суммарного вектора кинетического момента, требуемого для обеспечения завершения заданного режима ориентации и разгрузку СГ при помощи РД. При этом в качестве СГ для представленной заявки рассматриваем одностепенные СГ = реактивные маховики. При этом точность управления угловым движением, а, следовательно, и точность поддержания заданной ориентации, напрямую зависит от величины конечного вращательного импульса, прикладываемого к корпусу аппарата. Моменты управления КА при использовании РД в качестве исполнительных органов системы ориентации меняются скачкообразно (см. [1], стр.72). Поэтому фазовые диаграммы установившихся колебаний КА могут иметь изменяющиеся значения углов в колебательных циклах, превышающие заданную точность для режима поддержания ориентации. Указанное превышение может быть характерным и для угловых скоростей КА.
Для реализации предлагаемого способа рассмотрена система управления движением на основе бесплатформенной инерциальной навигационной системы (см. [3], стр.9). Она включает в себя: бортовую цифровую вычислительную машину (БЦВМ); блок датчиков угловой скорости (БДУС); блок согласующих устройств (БСУ); блок силовых гироскопов (БСГ), содержащий устройства измерений ; блок реактивных двигателей ориентации (БДО).
Информация для проведения последующего режима ориентации закладывается с помощью БУ в БЦВМ перед его проведением. С БУ производится также выдача команды в БЦВМ на начало проведения режима. В процессе его реализации, используя информацию с БДУС, БЦВМ, через БСУ выдает управляющие команды в БСГ.
В процессе управления КА БЦВМ определяет по выражению вектора  текущее значение и проверяет выполнение условия
текущее значение и проверяет выполнение условия
где S - область располагаемых значений вектора кинетического момента, через параметры, определяющие указанную область S. И в случае насыщения системы СГ (РМ) по вектору кинетического момента (невыполнение условия (1)) производит выдачу через БСУ в БДО команд на разгрузку системы с помощью РД.
Недостаток системы, как и способа, заключается в нарушении условий поддержания заданной ориентации по допускам на точность ее поддержания в момент включения РД.
При рассмотрении процессов управления КА с использованием РД и реактивных маховиков (РМ), последние обладают существенным преимуществом. Связано это с тем, что моментная характеристика РМ (одностепенного гиростабилизатора) в диапазоне его рабочих скоростей имеет плавный характер (см. [1], стр.129). Это позволяет уменьшить величину вращательного импульса от управляющего момента, воздействующего на КА. При этом известно, что если бы управляющие моменты можно было сформировать столь угодно малыми, а при конечных величинах - сколь угодно точно дозированными, то открылась бы возможность "привести" систему к центру фазовой плоскости и получить требуемую ориентацию с исключением каких-либо колебательных процессов.
Таким образом, чем более дозирован импульс управляющего момента, тем точнее можно поддерживать заданную ориентацию КА. РМ имеют в этом плане существенное преимущество перед РД.
В качестве прототипа к предлагаемому изобретению выбран способ управления КА с помощью РМ при поддержании заданной ориентации (см. [4]).
Суть способа включает в себя определение полетного интервала времени КА (t0, tk) для поддержания заданной ориентации. Далее измеряют параметры ориентации КА относительно опорного физического базиса в текущие моменты времени t pi(t), где i=1, 2, 3...I (углы и угловые скорости КА, сигналы наличия Солнца в зонах солнечного датчика и т.д.) - число параметров, по которым определяется ориентация связанного базиса КА относительно опорного физического базиса. В качестве одного из таких параметров измеряют угловую скорость КА . Производят поддержание заданной ориентации КА по указанным измеренным параметрам при помощи системы, содержащей j-e РМ, где j=1, 2, 3..., J - число РМ в системе. Для управления кинетическим моментом в РМ и КА в целом, измеряют текущие значения векторов угловых скоростей вращения РМ  . По известным значениям моментов инерции КА и РМ, а также измеренным значениям и определяют значения суммарного вектора кинетического момента КА . Далее производят проверку выполнения условия
. По известным значениям моментов инерции КА и РМ, а также измеренным значениям и определяют значения суммарного вектора кинетического момента КА . Далее производят проверку выполнения условия
где S - область располагаемых значений вектора кинетического момента системы РМ.
При этом, в случае выполнения условия (1) на указанном интервале, производится поддержание заданной ориентации без разгрузки РМ от накопленного кинетического момента, а в случае невыполнения указанного условия, производят разгрузку РМ.
Преимущество данного способа перед аналогом заключается в том, что для разгрузки РМ от накопленного кинетического момента не используются РД. Указанная разгрузка осуществляется при помощи момента, создаваемого силой светового давления. При этом, в качестве исполнительного органа, используются солнечные батареи (СБ).
Очевидно, что выбранный способ разгрузки позволяет производить не "скачкообразное" приложение внешнего управляющего момента, так как величина указанных сил не значительна. И разгрузка осуществляется за счет интегральной составляющей действия указанного момента на значительных интервалах полетного времени КА.
Для приложения внешнего момента могут использоваться другие физические явления. Например, силы от взаимодействия собственного магнитного момента СБ с магнитным полем Земли, гравитационные силы и др.
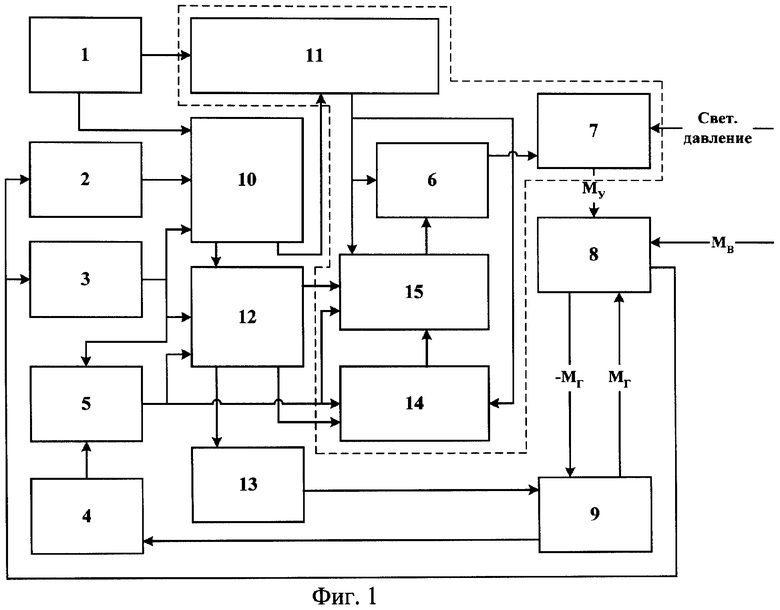
На фиг.1 представлена система-прототип, см. [4].
При этом введены обозначения:
1 - блок определения навигационных параметров (БОНП);
2 - блок датчиков ориентации (БДОР);
3 - БДУС;
4 - блок измерения кинетического момента РМ (БИКМ);
5 - блок определения вектора суммарного кинетического момента (БОВСКМ);
6 - система ориентации СБ (СОСБ);
7 - СБ;
8 - корпус КА;
9 - блок РМ(БРМ);
10 - блок определения углового положения КА (БОУП);
11 - блок определения координат единичного вектора направления на Солнце в связанном базисе (БОВССБ);
12 - блок определения параметров управления угловым движением (БОПУУД);
13 - блок формирования управляющих сигналов на РМ (БФУСРМ);
14 - блок оценки постоянной составляющей возмущающего момента (БОВМ);
15 - блок определения управляющего момента от сил давления и требуемого отклонения СБ (БОУМТО).
При этом первый вход БОВСКМ 5 связан с выходом БДУС 3, а второй вход - с выходом БИКМ 4. В БОУП 10 первый, второй и третий входы связаны соответственно со вторым выходом БОНП 1, с выходом БДОР 2 и с выходом БДУС 3. БОВССБ 15 первым входом связан с первым выходом БОНП 1, а вторым входом - со вторым выходом БОУП 10. БОПУУД 12 первым входом связан с первым выходом БДУП 10, вторым входом с выходом БДУС 3, а третьим входом - с выходом БОВСКМ 5. БФУСРМ 13 своим входом связан со вторым выходом БОПУУД 12. БОВМ 14 первым входом соединен с выходом БОВССБ 11; вторым входом - с выходом БОВСКМ 5 и третьим входом - с третьим выходом БОПУУД 12. Выход БРМ 9 связан с входом БИКМ 4, а вход БРМ 9 связан с выходом БФУСРМ 13. БОУМТО 15 первым входом связан с выходом БОВССБ 15, вторым входом - с первым выходом БОПУУД 12, третьим входом - с выходом БОВСКМ 5 и четвертым входом - с выходом БОВМ 14.
Первый вход СОСБ 6 связан с выходом БОВССБ 11, а второй вход СОСБ 6 - с выходом БОУМТО 15.
Кроме того, на фиг.1 дополнительно показаны: направления обмена БРМ 9 управляющим моментом  с корпусом КА; направление действия главного вектора возмущающего момента
с корпусом КА; направление действия главного вектора возмущающего момента  ; направление действия управляющего момента от СБ; направление действия силы светового давления; установка БДОР 2 и БДУС 3 на конструкции корпуса КА 8.
; направление действия управляющего момента от СБ; направление действия силы светового давления; установка БДОР 2 и БДУС 3 на конструкции корпуса КА 8.
Пунктирной линией выделен контур безрасходной (по рабочему телу РД) разгрузки БРМ 9 от накопленного кинетического момента.
Для предотвращения потери управляемости системы РМ при насыщении кинетическим моментом предложена ее разгрузка при помощи сил светового давления. При этом разгрузка производится на фоне поддержания заданной ориентации КА.
Работает система (см. фиг.1) следующим образом. БОУП 10 на основе значений вектора угловой скорости в связанном базисе, поступающих с БДУС 3, и данных, поступающих с БДОР 2, формирует кинематические параметры управления КА. Указанные параметры используются в БОВССБ 11 и БОУП 10. БОВСКМ 5 формирует для БОПУУД 12, БОВМ 14 и БОУМТО 15 компоненты вектора суммарного кинетического момента  .
.
БОПУУД 12 формирует расчетное значение вектора требуемого управляющего момента для построения и поддержания ориентации КА
где N - параметры кинематического контура управления КА (например, кватернион разворота от орбитального базиса к связанному), компоненты которого используются в БФУСРМ 13, и требуемый вектор орбитальной угловой скорости  в связанном базисе, координаты которого используются в БОВМ 14. Кроме того, БОПУУД 12 формирует для БОУМТО 15 требование на формирование управляющего момента от сил светового давления.
в связанном базисе, координаты которого используются в БОВМ 14. Кроме того, БОПУУД 12 формирует для БОУМТО 15 требование на формирование управляющего момента от сил светового давления.
БФУСРМ 13 использует компоненты вектора управляющего момента для формирования сигналов на электрические двигатели, управляющие скоростями вращения РМ.
БОВССБ 11 использует координаты единичного вектора направления на Солнце в выбранной инерциальной системе координат, формируемые БОНП 1 и кинематические параметры из БОВМ 14. По ним рассчитываются координаты единичного вектора направления на Солнце в связанной системе координат, используемые в СОСБ 6. СОСБ 6 осуществляет разворот СБ 7 в требуемое положение. Расчетные зависимости, по которым строится указанный алгоритм, приведены в [4], см. стр.14-19.
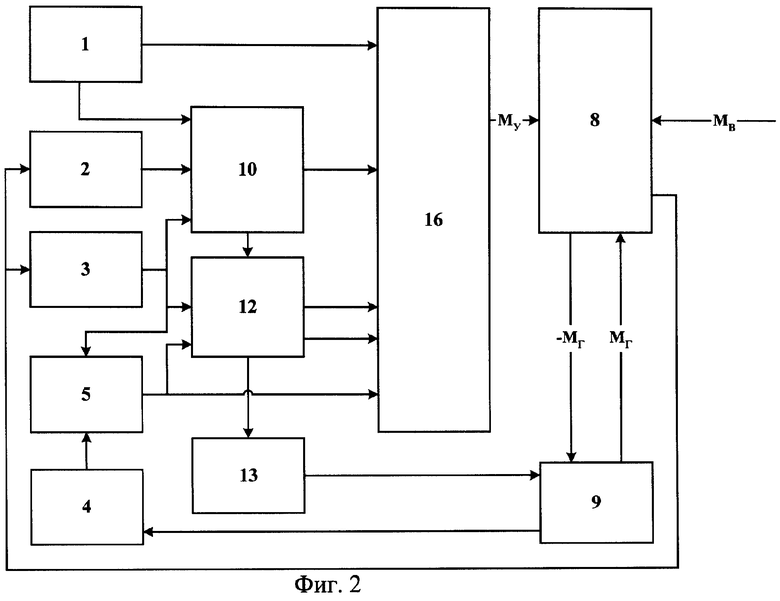
Рассмотренная система использует одно из физических явлений для решения задач разгрузки БРМ 9 от накопленного кинетического момента. Аналогичным образом можно использовать и другие физические явления для указанных целей (см. [1], стр.177). Исходя из этого СОСБ 6, СБ 7, БОВССБ 11, БОВМ 14 и БОУМТО 15 и их функциональные связи можно функционально объединить в единый блок безрасходной разгрузки системы РМ. (ББРСРМ), см. 16 на фиг.2, подразумевая при этом, что в него может входить разноообразие устройств, использующих различные физические явления для разгрузки БРМ 9 от накопленного кинетического момента. Другие блоки системы на фиг.1 являются универсальными с точки зрения подготовки исходных данных для определения .
С учетом вновь введенного блока ББРСРМ 16, на фиг.2, во изменение ранее описанных (см. фиг.1), введены новые функциональные связи.
Первый вход ББРСРМ 16 соединен с первым выходом БОНП 1, второй вход - со вторым выходом БОУП 10, третий вход - с первым входом БОПУУД 12, четвертый вход - с третьим выходом БОПУУД 12 и пятый вход - с выходом БОВСКМ 5. Остальные обозначения и функциональные связи на фиг.2 соответствуют обозначениям, введенным на фиг.1.
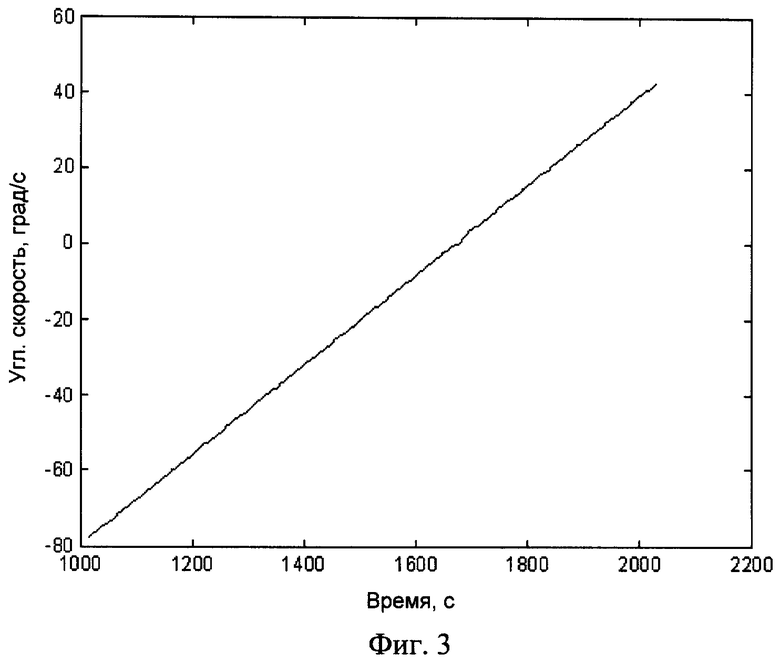
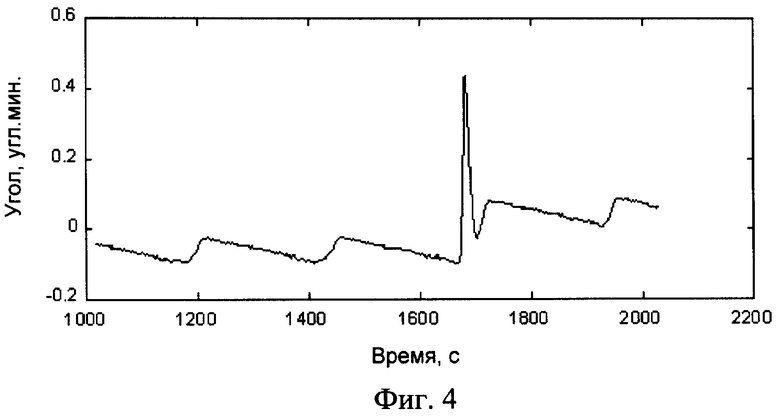
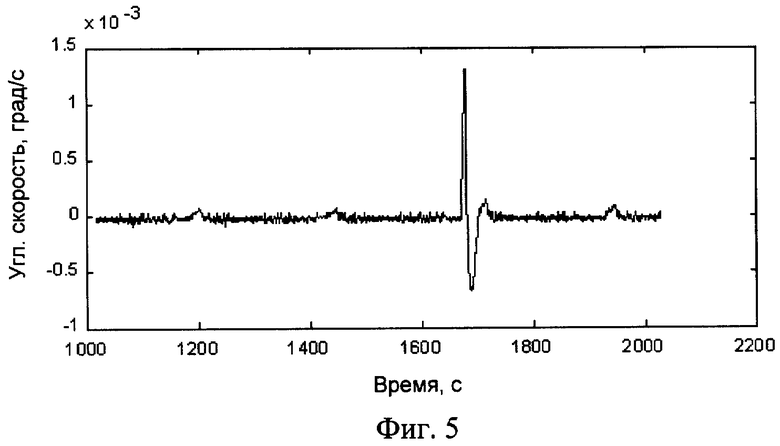
Главный недостаток способа и системы прототипов заключается в том, что при изменении знаков  управляющий момент изменяется скачкообразно. При этом возникает уже обсуждавшаяся применительно к РД ориентации проблема о минимально возможном единичном импульсе. В качестве примера на фиг.3, 4, 5 представлены соответственно графики для одной из осей управления ориентацией КА: угловой скорости маховика, значение угла ориентации и значения угловой скорости. Как видно из указанных фигур, в момент времени прохождения угловой скоростью нулевого значения наблюдаются "всплески" по углу ориентации и угловой скорости КА. Указанные отклонения являются запредельными для требований точности поддержания ориентации КА.
управляющий момент изменяется скачкообразно. При этом возникает уже обсуждавшаяся применительно к РД ориентации проблема о минимально возможном единичном импульсе. В качестве примера на фиг.3, 4, 5 представлены соответственно графики для одной из осей управления ориентацией КА: угловой скорости маховика, значение угла ориентации и значения угловой скорости. Как видно из указанных фигур, в момент времени прохождения угловой скоростью нулевого значения наблюдаются "всплески" по углу ориентации и угловой скорости КА. Указанные отклонения являются запредельными для требований точности поддержания ориентации КА.
Не обеспечение точности выполнения режима поддержания заданной ориентации приводит, в свою очередь, к срыву выполнения целевой задачи, поставленной перед КА. Например, к "смазу" изображений при фотографировании Земли из космоса, нарушениям границ земных зон обслуживания ретрансляторами систем связи, размещенными на искусственном спутнике Земли, пропаданием связи для наземных потребителей и другим негативным последствиям.
Технический результат предлагаемого технического решения направлен на исключение скачкообразного (релейного) изменения управляющих моментов от РМ при поддержании заданной ориентации.
Для достижения указанного технического результата в способе управления космическим аппаратом при поддержании заданной ориентации с помощью реактивных маховиков, включающем определение полетного интервала времени космического аппарата (t0, tк) для поддержания заданной ориентации, измерение параметров ориентации космического аппарата относительно опорного физического базиса в текущие моменты времени t pi(t), где i=1, 2, 3,..., I - число параметров, определяющих ориентацию связанного базиса космического аппарата относительно опорного физического базиса, в том числе измерение вектора абсолютной угловой скорости космического аппарата  , измерение текущих значений векторов угловых скоростей вращения j-x реактивных маховиков
, измерение текущих значений векторов угловых скоростей вращения j-x реактивных маховиков  , где j=1, 2, 3,..., J - число реактивных маховиков, определение значений суммарного вектора кинетического момента космического аппарата по известным значениям моментов инерции космического аппарата и реактивных маховиков, а также измеренным значениям векторов
, где j=1, 2, 3,..., J - число реактивных маховиков, определение значений суммарного вектора кинетического момента космического аппарата по известным значениям моментов инерции космического аппарата и реактивных маховиков, а также измеренным значениям векторов  и , проверку выполнения условия
и , проверку выполнения условия
где S - область располагаемых значений вектора кинетического момента реактивных маховиков, и, в случае выполнения указанного условия на интервале (t0, tк), поддержание заданной ориентации без разгрузки реактивных маховиков от накопленного кинетического момента, а в случае невыполнения указанного условия, разгрузку реактивных маховиков от накопленного кинетического момента, в отличие от известного при поддержании ориентации производят последовательную проверку "n"-возможных вариантов изменения знаков векторов  реактивных маховиков, где n=1, 2, 3..., путем перераспределения кинетического момента внутри реактивных маховиков и в моменты времени изменения знаков векторов проверяют выполнение условий
реактивных маховиков, где n=1, 2, 3..., путем перераспределения кинетического момента внутри реактивных маховиков и в моменты времени изменения знаков векторов проверяют выполнение условий

где ηi - номинальные значения измеряемых i-x параметров ориентации, обеспечивающих поддержание заданной ориентации космического аппарата в пределах допустимых диапазонов;
δi - величины, определяющие допустимые диапазоны на i-e параметры ориентации космического аппарата,
и в случае выполнения условия (2) по всем i-м параметрам продолжают поддержание ориентации, а в случае его не выполнения фиксируют "к"-е варианты изменения знаков  и также продолжают поддержание ориентации космического аппарата до завершения всех указанных "n"-х вариантов изменения векторов , а по окончании поддержания указанной ориентации прогнозируют изменения вектора на последующем интервале (t0, tк) и по результатам прогноза выделяют из составляющую суммарного вектора кинетического момента реактивных маховиков
и также продолжают поддержание ориентации космического аппарата до завершения всех указанных "n"-х вариантов изменения векторов , а по окончании поддержания указанной ориентации прогнозируют изменения вектора на последующем интервале (t0, tк) и по результатам прогноза выделяют из составляющую суммарного вектора кинетического момента реактивных маховиков  , далее по полученным значениям определяют изменение знаков векторов реактивных маховиков на указанном интервале, по которым, в свою очередь, определяют "n"-е варианты для реактивных маховиков, изменяющих знак
, далее по полученным значениям определяют изменение знаков векторов реактивных маховиков на указанном интервале, по которым, в свою очередь, определяют "n"-е варианты для реактивных маховиков, изменяющих знак  , сравнивают их с "к"-ми вариантами изменения знаков , и, в случае их не совпадения, поддержание заданной ориентации космического аппарата с использованием реактивных маховиков производят с начальными условиями
, сравнивают их с "к"-ми вариантами изменения знаков , и, в случае их не совпадения, поддержание заданной ориентации космического аппарата с использованием реактивных маховиков производят с начальными условиями  , а в случае совпадения "n"-х вариантов с "к"-ми, производят поиск начального условия
, а в случае совпадения "n"-х вариантов с "к"-ми, производят поиск начального условия  , при котором управление реактивными маховиками не приводит к изменению знаков при одновременном выполнении условия (1) на интервале (t0, tк), а в случае не выполнения условия (1) на указанном интервале, определяют начальные условия
, при котором управление реактивными маховиками не приводит к изменению знаков при одновременном выполнении условия (1) на интервале (t0, tк), а в случае не выполнения условия (1) на указанном интервале, определяют начальные условия  , обеспечивающие выполнение условий (1) и (2) на интервале (t0, t'к), максимальном по продолжительности и принадлежащем интервалу (t0, tк), далее к моменту времени t0 начала поддержания ориентации производят приведение вектора кинетического момента космического аппарата
, обеспечивающие выполнение условий (1) и (2) на интервале (t0, t'к), максимальном по продолжительности и принадлежащем интервалу (t0, tк), далее к моменту времени t0 начала поддержания ориентации производят приведение вектора кинетического момента космического аппарата  к одному из найденных начальных условий или
к одному из найденных начальных условий или  путем разгрузки реактивных маховиков от накопленного кинетического момента и производят поддержание заданной ориентации с помощью реактивных маховиков до момента времени завершения интервала tк или t'к соответственно.
путем разгрузки реактивных маховиков от накопленного кинетического момента и производят поддержание заданной ориентации с помощью реактивных маховиков до момента времени завершения интервала tк или t'к соответственно.
Технический результат достигается тем, что в системе способа управления космическим аппаратом при поддержании заданной ориентации с помощью реактивных маховиков, содержащей блок определения навигационных параметров, блок датчиков ориентации, блок датчиков угловых скоростей, блок измерения кинетического момента реактивных маховиков, блок определения вектора суммарного кинетического момента, блок определения углового положения космического аппарата, блок определения параметров управления угловым движением, блок формирования управляющих сигналов на реактивные маховики, блок безрасходной разгрузки реактивных маховиков, блок реактивных маховиков, при этом первый выход блока определения навигационных параметров соединен с первым входом блока безрасходной разгрузки реактивных маховиков, а второй выход того же блока соединен с первым входом блока определения углового положения космического аппарата, выход блока датчиков ориентации соединен со вторым входом блока определения углового положения космического аппарата, выход блока датчиков угловых скоростей соединен с третьим входом блока определения углового положения космического аппарата, вторым входом блока определения параметров управления угловым движением, первым входом блока определения вектора суммарного кинетического момента, первый выход блока измерения кинетического момента реактивных маховиков соединен со вторым входом блока определения вектора суммарного кинетического момента, а вход блока измерения реактивных маховиков соединен с выходом блока реактивных маховиков, первый и второй выходы блока определения углового положения космического аппарата соединены соответственно с первым входом блока определения параметров управления угловым движением и вторым входом блока безрасходной разгрузки реактивных маховиков, первый, второй и третий выходы блока определения параметров управления угловым движением соединены соответственно с третьим входом блока безрасходной разгрузки реактивных маховиков, первым входом блока формирования управляющих сигналов на реактивные маховики и четвертым входом блока безрасходной разгрузки реактивных маховиков, выход блока определения вектора суммарного кинетического момента соединен с пятым входом блока безрасходной разгрузки реактивных маховиков, выход блока формирования управляющих сигналов на реактивные маховики соединен с входом блока реактивных маховиков, в нее дополнительно включены блок управления движением и навигацией, блок проверочных включений реактивных маховиков, блок проверки на условие точности выполнения ориентации, блок формирования вариантов, определяющих нарушение точности выполнения ориентации, блок прогноза вектора суммарного кинетического момента, блок проверки выполнения условия безрасходного управления, блок определения кинетического момента реактивных маховиков по результатам прогноза, блок определения наличия вариантов изменения знаков угловой скорости маховиков, блок сравнения вариантов по нарушению условий поддержания точности ориентации, блок поиска начальных условий по вектору кинетического момента, блок определения начальных условий для максимальной продолжительности режима ориентации, при этом первый, второй, третий, четвертый и пятый выходы блока управления движением и навигацией, соединены соответственно с первым входом блока прогноза вектора суммарного кинетического момента, входом блока проверочных включений реактивных маховиков, первым и пятым входами блока поиска начальных условий по вектору кинетического момента, четвертым входом блока определения начальных условий для максимальной продолжительности режима ориентации, первый и второй выходы блока проверочных включений реактивных маховиков соединены соответственно со вторым входом блока формирования управляющих сигналов на реактивные маховики и четвертым входом блока проверки на условие точности выполнения ориентации, первый, второй и третий входы которого соединены соответственно с выходами блока датчиков ориентации, блока датчиков угловой скорости, блока реактивных маховиков, а выход блока проверки на условия точности выполнения ориентации соединен с первым входом блока формирования вариантов, определяющих нарушения точности выполнения ориентации, а второй вход указанного блока соединен с выходом блока реактивных маховиков, выход блока формирования вариантов, определяющих нарушения точности выполнения ориентации соединен с первым входом блока сравнения вариантов по нарушению условий поддержания точности ориентации, второй, третий и четвертый входы блока прогноза вектора суммарного кинетического момента, соединены соответственно с выходом блока определения вектора суммарного кинетического момента, третьим выходом блока определения углового положения космического аппарата, вторым выходом блока определения навигационных параметров, первый, второй, третий, четвертый и пятый выходы блока проверки выполнения условия безрасходного управления соединены соответственно с шестым входом блока безрасходной разгрузки реактивных маховиков, с первым входом блока определения кинетического момента реактивных маховиков по результатам прогноза, со вторым входом блока поиска начальных условий по вектору кинетического момента, третьим входом блока определения начальных условий для максимальной продолжительности режима ориентации, шестым входом блока определения параметров управления угловым движением, а первый, второй, третий и четвертый входы блока проверки выполнения условия безрасходного управления соединены соответственно с выходом блока прогноза вектора суммарного кинетического момента, с выходом блока датчиков угловых скоростей, со вторым выходом блока измерения кинетического момента реактивных маховиков, с выходом блока поиска начальных условий по вектору кинетического момента, второй вход блока определения кинетического момента реактивных маховиков по результатам прогноза соединен с четвертым выходом блока определения параметров управления угловым движением, а выход блока определения кинетического момента реактивных маховиков по результатам прогноза соединен с входом блока определения наличия вариантов изменения знаков угловой скорости маховиков, первый, второй, третий, четвертый и пятый выходы блока определения наличия вариантов изменения знаков угловой скорости маховиков соединены соответственно с пятым входом блока определения параметров управления угловым движением, с четвертым входом блока поиска начальных условий по вектору кинетического момента, со вторым входом блока сравнения вариантов по нарушению условий поддержания точности ориентации, с седьмым входом блока безрасходной разгрузки реактивных маховиков и с первым входом блока определения начальных условий для максимальной продолжительности режима ориентации, первый, второй, третий и четвертый выходы блока сравнения вариантов по нарушению условий поддержания точности выполнения ориентации соединены соответственно с четвертым входом блока определения параметров управления угловым движением, с третьим входом блока поиска начальных условий по вектору кинетического момента, с седьмым входом блока безрасходной разгрузки реактивных маховиков, со вторым входом блока определения начальных условий для максимальной продолжительности режима ориентации, первый и второй выходы блока определения начальных условий для максимальной продолжительности режима ориентации соединен соответственно по отдельности с шестыми входами блоков безрасходной разгрузки реактивных маховиков и определения параметров управления угловым движением.
Для объяснения сути предлагаемого технического решения в описание изобретения введены фиг.1 - 7.
На фиг.1-2 представлены функциональные блок-схемы системы-прототипа.
На фиг.3-5 представлены графики угловой скорости РМ, угла ориентации и угловой скорости КА соответственно.
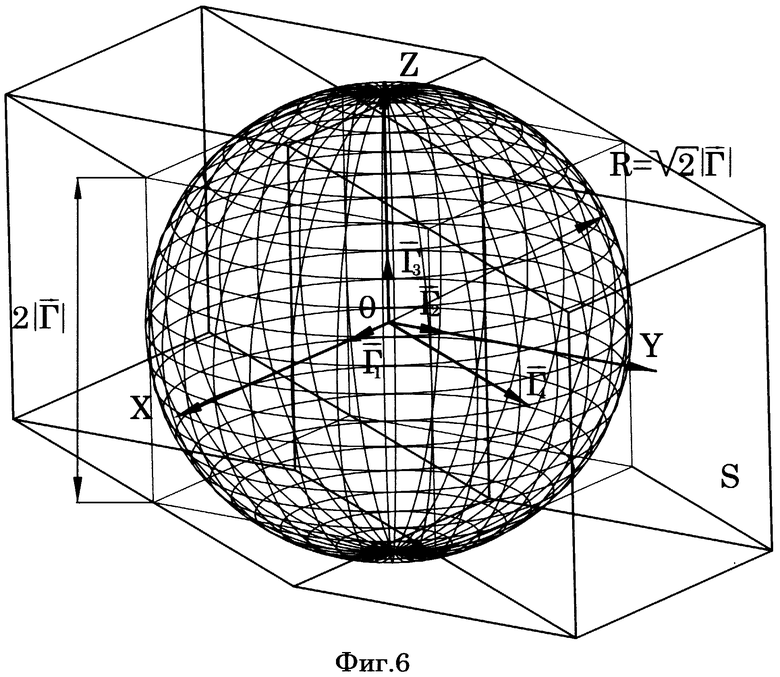
На фиг.6 представлена схема расположения j-x РМ на КА, где j=1, 2, 3, 4 и область S системы, созданной j-ми РМ.
На фиг.7 представлена функциональная блок-схема предлагаемой системы управления КА.
Пусть на КА установлено 4-е РМ с неподвижными осями вращения (см. фиг.6). Матрица направляющих косинусов их собственных кинетических моментов для РМ с векторами  , равными по абсолютному значению
, равными по абсолютному значению  , имеет вид:
, имеет вид:
При этом триэдр связанного базиса OXYZ согласован с эллипсоидом инерции КА - строительные оси являются одновременно главными центральными осями инерции.
Область S (см. фиг.6) располагаемых значений вектора кинетического момента имеет вид неправильного многогранника с вписанной сферой радиусом

Суммарный вектор кинетического момента системы  состоит из j-x роторов (гироскопов), каждый со своим кинетическим моментом
состоит из j-x роторов (гироскопов), каждый со своим кинетическим моментом  :
:
где  и Ij - векторы угловой скорости РМ относительно корпуса и момент инерции соответствующих роторов маховиков.
и Ij - векторы угловой скорости РМ относительно корпуса и момент инерции соответствующих роторов маховиков.
В процессе управления угловым движением КА с помощью системы РМ, маховики могут изменять знак по "n"-м вариантам в соответствии с таблицей 1.
Наиболее вероятными являются первые десять (n=1, 2,...,10) вариантов. Менее вероятны варианты n=11...15. При этом рассматриваются только законы управления системой маховиков без включения РД, которая обеспечивает, в свою очередь, управление угловым движением КА. Однако не каждая из комбинаций в "n"-х вариантах может приводить к нарушению точности поддержания заданной ориентации. Различное сочетание в изменении знаков приводит к различным проявлениям в поведении динамики КА. В каждом конкретном случае это зависит от инерционных характеристик КА, конструктивных особенностей, наличия демфирующих элементов и т.д. И установить указанные отклонения по углу и угловой скорости (или другим параметрам, установленным для управления в кинематическом контуре КА) возможно наиболее достоверно непосредственно в условиях космического полета. Связано это с тем, что окончательно динамические параметры космических аппаратов формируются после выведения их на рабочую орбиту и раскрытия всех элементов конструкции.
Для определения, какой из вариантов "n" может привести к нарушению требований по точности поддержания заданной ориентации, необходимо провести проверку указанных "n"-х возможных вариантов изменения знаков векторов  .
.
Для этого при поддержании ориентации производим перераспределение кинетического момента внутри реактивных маховиков. Например, маховик с кинетическим моментом ротора  управляет угловым движением КА вокруг оси ОХ, производит направленный набор угловой скорости от нуля до значения
управляет угловым движением КА вокруг оси ОХ, производит направленный набор угловой скорости от нуля до значения  , при этом четвертый маховик парирует указанный кинетический момент за счет противоположного направления проекции создаваемого им кинетического момента на указанную ось. Одновременно второй и третий маховики парируют составляющие кинетического момента четвертого маховика на оси ОУ и OZ соответственно, которые образуются в процессе работы четвертого маховика.
, при этом четвертый маховик парирует указанный кинетический момент за счет противоположного направления проекции создаваемого им кинетического момента на указанную ось. Одновременно второй и третий маховики парируют составляющие кинетического момента четвертого маховика на оси ОУ и OZ соответственно, которые образуются в процессе работы четвертого маховика.
Потребная величина кинетического момента четвертого маховика для парирования работы первого составит  . Далее разгон маховиков заменяется торможением. Если у четвертого маховика на момент начала разгона были нулевые начальные условия, то по концу торможения оба маховика могут одновременно изменить знаки угловой скорости (произойдет взаимный обмен кинетическим моментом между двумя маховиками через корпус КА без "вмешательства" составляющей
. Далее разгон маховиков заменяется торможением. Если у четвертого маховика на момент начала разгона были нулевые начальные условия, то по концу торможения оба маховика могут одновременно изменить знаки угловой скорости (произойдет взаимный обмен кинетическим моментом между двумя маховиками через корпус КА без "вмешательства" составляющей  ).
).
Если же у четвертого маховика начальные условия по вектору кинетического момента были отличные от нуля, то при отрицательных значениях указанных условий по окончанию торможения первого маховика с последующим сохранением знака управляющего момента произойдет смена знака  с "+" на "-", а при положительных значениях начальных условий Г°4<0,87 Г, смена знака
с "+" на "-", а при положительных значениях начальных условий Г°4<0,87 Г, смена знака  произойдет ранее, до смены знака
произойдет ранее, до смены знака  .
.
При этом поведение второго и третьего маховиков в процессе "прокачки" кинетического момента первого маховика на  также будет зависеть от начальных условий на момент начала проведения указанного проверочного перераспределения кинетического момента в системе и действия . Так как им приходится компенсировать управляющие моменты, создаваемые четвертым маховиком, и при этом поддерживать ориентацию КА, то у них также происходят изменения кинетического момента, которые могут привести к смене в знаках
также будет зависеть от начальных условий на момент начала проведения указанного проверочного перераспределения кинетического момента в системе и действия . Так как им приходится компенсировать управляющие моменты, создаваемые четвертым маховиком, и при этом поддерживать ориентацию КА, то у них также происходят изменения кинетического момента, которые могут привести к смене в знаках  и
и  .
.
При поддержании ориентации и одновременном проведении перераспределения кинетического момента в системе, необходимо учитывать также действующий на КА внешний возмущающий момент  . Указанный момент будет действовать на всем интервале перераспределения кинетического момента в РМ, при этом маховики одновременно будут производить управление угловым движением КА по данным, поступающим от кинематического контура системы управления движением. Тем самым РМ будут парировать действие за счет изменений собственного кинетического момента (см. [1], стр.137...147, [4], стр.16, 17).
. Указанный момент будет действовать на всем интервале перераспределения кинетического момента в РМ, при этом маховики одновременно будут производить управление угловым движением КА по данным, поступающим от кинематического контура системы управления движением. Тем самым РМ будут парировать действие за счет изменений собственного кинетического момента (см. [1], стр.137...147, [4], стр.16, 17).
Таким образом, проведя одну или несколько "прокачек" каждого из маховиков при разных начальных условиях для векторов , производим последовательную проверку всех "n"-возможных вариантов изменения знаков векторов  . При этом в моменты времени изменения знаков векторами
. При этом в моменты времени изменения знаков векторами  проверяем выполнение условий (2).
проверяем выполнение условий (2).
На фиг.4, 5 показаны изменения угловой координаты и угловой скорости КА в момент времени прохождения одним из маховиков нуля и смены знака . При этом произошло превышение допустимых значений - по углу (ϑ), δϑ|0,1'|, рϑ-ηϑ=0,4'-0,15'≈0,25' и по угловой скорости  ,
,  ,
,  .
.
В процессе проверок возможны ситуации, когда условие (2) не выполняется не по всем параметрам ориентации КА. Поскольку указанное несоответствие условиям также приводит к срыву решения целевой задачи, то его необходимо отнести к области недопустимых технических решений.
Таким образом, в процессе постоянного поддержания ориентации и проведения проверок по изменению векторов по всем "n"-м вариантам необходимо фиксировать "к"-е варианты указанных изменений, при которых не выполняются условия (2). Если "n" рассматривать как множество решений, то "к" является подмножеством множества "n" (к⊂n).
Завершив необходимые проверки, можно приступать к непосредственному выполнению программы полета.
Для этого прогнозируем изменения вектора  для последующего поддержания заданной ориентации на интервале (t0, tк), см. [5]. Получив
для последующего поддержания заданной ориентации на интервале (t0, tк), см. [5]. Получив  , выделяем из него составляющую
, выделяем из него составляющую  по известному выражению (см. [1], стр.122):
по известному выражению (см. [1], стр.122):

при этом  - кинетический момент корпуса КА известен из условия поддержания заданной ориентации, например, для режима орбитальной ориентации
- кинетический момент корпуса КА известен из условия поддержания заданной ориентации, например, для режима орбитальной ориентации

где К0 - кинетический момент орбитального движения КА;
К0=I Ω0, где I - тензор инерции КА, Ω0 - орбитальная скорость КА.
По полученным значениям можно определить изменение знаков векторов . Для этого анализируется закон управления маховиками, например, при использовании четвертого маховика только как резервного, и задействование которого производится только при отказе одного из первых трех маховиков, изменению знака компоненты вектора  , будет означать и соответствующее ему изменение знака . Это связано с тем, что каждая из компонент вектора при управлении КА формируется отдельным маховиком, т.е.
, будет означать и соответствующее ему изменение знака . Это связано с тем, что каждая из компонент вектора при управлении КА формируется отдельным маховиком, т.е.

где Iм - момент инерции ротора маховика при условии применения РМ, одинаковых по конструкции.
Определив, какие из "n"-х вариантов могут иметь место при поддержании заданной ориентации, проверяем их на принадлежность подмножеству "к". В случае пустого подмножества к=0, выполнение динамического режима не приведет к нарушению требуемых условий поддержания заданной ориентации. Следовательно, с начальными условиями  проводим указанный режим.
проводим указанный режим.
Если же к≠0, то производим поиск начального условия  , при котором управление не будет приводить к смене знака . В рассматриваемом примере для Нх, Ну, Hz должны исключаться переходы через нулевые значения.
, при котором управление не будет приводить к смене знака . В рассматриваемом примере для Нх, Ну, Hz должны исключаться переходы через нулевые значения.
Пример поиска таких условий представлен в [6] для случая выполнения режима поддержания ориентации после программного разворота. При этом значение должно обеспечивать выполнение условия (1). Одним из приемлемых методов поиска начальных условий является метод последовательных итераций. Для его реализации к значению прибавляется  , т.е.
, т.е.  , далее проверяется условие (1) (например, при апроксимации области S сферой должно выполняться условие
, далее проверяется условие (1) (например, при апроксимации области S сферой должно выполняться условие  и процесс поиска повторяется несколько раз до выполнения указанного условия. В случае, если найти указанные условия не удается в силу ограниченности области S, производится определение
и процесс поиска повторяется несколько раз до выполнения указанного условия. В случае, если найти указанные условия не удается в силу ограниченности области S, производится определение  , обеспечивающих выполнение условия (1) на интервале (t0, t'к), максимальном по продолжительности и принадлежащих интервалу (t0, t'к).
, обеспечивающих выполнение условия (1) на интервале (t0, t'к), максимальном по продолжительности и принадлежащих интервалу (t0, t'к).
Например, если область S на фиг.6 апроксимировать сферой радиусом R, то начальные условия , которые могут обеспечить управление на интервале  можно задать следующим образом:
можно задать следующим образом:

т.е. управление должно привести кинетический момент от поверхности сферы во внутрь. Таким образом, максимально будет использована область S располагаемых значений вектора кинетического момента. При этом необходимо дополнительно провести проверку выполнения условия (1) на всем интервале (t0, t'к). В случае невыполнения условия (1) путем последовательных итераций с изменением компонент и знаков вектора  , производится поиск начальных условий, обеспечивающих выполнение условия (1). Определив начальные условия или путем разгрузки системы РМ от накопленного кинетического момента, производим приведение текущего значения вектора на момент времени t0 к одному из значений или .
, производится поиск начальных условий, обеспечивающих выполнение условия (1). Определив начальные условия или путем разгрузки системы РМ от накопленного кинетического момента, производим приведение текущего значения вектора на момент времени t0 к одному из значений или .
Получив к моменту времени t0 искомые значения или  производим поддержание заданной ориентации при помощи системы РМ до момента времени завершения интервала tк или t'к соответственно.
производим поддержание заданной ориентации при помощи системы РМ до момента времени завершения интервала tк или t'к соответственно.
Реализацию предложенного способа можно осуществить при помощи системы управления движением и навигации (СУДН) КА, построенной на принципах бесплатформенных инерциально навигационных систем (БИНС), (см. [1], стр.101...105, [4], стр.12...18). При этом в нее необходимо ввести дополнительные блоки и функциональные связи, позволяющие реализовать предлагаемый "Способ управления КА...".
На фиг.7 представлена функциональная блок-схема указанной системы.
При этом на фиг.7 введены нижеследующие обозначения:
17 - блок управления движением и навигацией (БУДН);
18 - блок проверочных включений РМ (БПВРМ);
19 - блок проверки на соответствия условиям точности выполнения ориентации (БПУТВО);
20 - блок формирования вариантов нарушения точности выполнения ориентации (БФВНТВО);
21 - блок прогноза вектора суммарного кинетического момента (БПВСКМ);
22 - блок проверки выполнения условия безрасходного управления (БПВУБУ);
23 - блок определения кинетического момента РМ по результатам прогноза (БОКМРМРП);
24 - блок определения наличия вариантов изменения знаков угловой скорости маховиков (БОНИЗУСМ);
25 - блок сравнения вариантов по нарушению условий поддержания точности ориентации (БСВНУПТО);
26 - блок поиска начальных условий по вектору кинетического момента (БПНУВКМ);
27 - блок определения начальных условий для максимальной продолжительности режима ориентации (БОНУМПРО).
При этом первый выход БУДН 17 соединен с первым входом БПВСКМ 21, а второй, третий и четвертый выходы того же блока - с входом БПВРМ 18, первым и пятым входами БПНУВКМ 26. Первый выход БПВРМ 18 соединен со вторым входом БФУСРМ 13, а второй выход указанного блока - с четвертым входом БПУТВО 19. Выход БПУТВО 19 соединен с первым входом БФВНТВО 20, а первый, второй и третий входы БПУТВО 19 соединены соответственно с выходами БДОР 2, БДУС 3 и БРМ 9.
Выход БФВНТВО 20 соединен с первым входом БСВНУПТО 25, а второй вход БФВНТВО 20 соединен с выходом БРМ 9.
БПВСКМ 21 своим выходом соединен с первым входом БПВУБУ 22, а второй, третий и четвертый входы в БПВСКМ 21 соединены соответственно со вторым выходом БОНП 1, третьим выходом БОУП 10 и выходом БОВСКМ 5.
Первый, второй и третий выходы БПВУБУ 22 соединены соответственно с шестым входом ББРСРМ 16, первым входом БОКМРМРП 23 и вторым входом БПНУВКМ 26. А второй, третий и четвертый входы БПВУБУ 22 соединены соответственно с выходом БДУС 3, вторым выходом БИКМ 4 и выходом БПНУВКМ 26.
Второй вход БОКМРМРП 23 соединен с четвертым выходом БОПУУД 12. А выход БОКМРМРП 23 соединен с входом БОНИЗУСМ 24.
Первый, второй, третий и четвертый выходы БОНИЗУСМ 24 соединены соответственно с пятым входом БОПУУД 12, четвертым входом БПНУВКМ 26, вторым входом БСВНУПТО 25 и седьмым входом ББРСРМ 16.
Первый, второй и третий выходы БСВНУПТО 25 соединены соответственно с четвертым входом БОПУУД 12, третьим входом БПНУВКМ 26 и седьмым входом ББРСРМ 16.
Первый, второй, третий и четвертый входы БОНУМПРО 27 соединены соответственно с пятым выходом БОНИЗУСМ 24, с четвертым выходом БСВНУПТО 25, с четвертым выходом БПВУБУ 22, с пятым выходом БУДН 17.
Выход БОНУМПРО 27 соединен с пятым входом ББРСРМ 16. Пятый выход БПВУБУ 22 и второй выход БОНУМПРО 27, соединены с шестым входом ББРСРМ 16.
Работает система (см. фиг.7) следующим образом.
В БПВРМ 18 из второго выхода БУСУДН 17 выдается команда на дополнительные проверочные включения по одному из j-x PM. При этом выбор j-го PM может производиться с учетом начальных условий по вектору на момент выдачи указанной команды. Как указывалось ранее, от начальных условий будет зависеть, какие PM поменяют свой знак  в процессе проверочного включения выбранного маховика.
в процессе проверочного включения выбранного маховика.
По указанной команде на соответствующий j-й маховик в БРМ 9, например, первый, поступает серия управляющих импульсов из первого выхода БПВРМ 18 на второй вход БФУСРМ 13, пропорциональных угловой скорости его вращения. При этом в управлении маховика участвует также блок БФУСРМ 13 по командам (импульсам) с БОПУУД 12. Таким образом, производится управление маховиком по суммарному коду управления на выполнение режима ориентации и на проведение проверочного включения. В процессе разгона (торможения) выбранного маховика, суммарный управляющий момент  , действующий на КА, частично воспринимается динамическим контуром как возмущающий
, действующий на КА, частично воспринимается динамическим контуром как возмущающий  . Следовательно, система управления движением его парирует путем приложения управляющих моментов от второго и третьего маховиков и подключения в работу резервного (четвертого маховика).
. Следовательно, система управления движением его парирует путем приложения управляющих моментов от второго и третьего маховиков и подключения в работу резервного (четвертого маховика).
В результате происходит описанное ранее перераспределение кинетического момента внутри РМ между маховиками.
В процессе указанного перераспределения  меняют свои знаки, при этом момент времени события фиксируется БПУТВО 19 по информации с выхода БРМ 9. Для этого выход БРМ 9 подключен к третьему входу указанного блока, по которому информация от датчиков угловой скорости РМ (например, тахогенераторов) поступает на третий вход БПУТВО 19. Одновременно на входы первый и второй БПУТВО 19 поступает информация из БДОР 2 и БДУС 3 о текущем значении параметров pi(t). При этом работа БПУТВО 19 осуществляется по команде на его четвертый вход с БПВРМ 18, одновременно с началом выдачи команд в БФУСРМ 13. В БПУТВО 19 производится проверка выполнения условий (2) по ηi и δi, ранее заложенным в логику работы блока в момент времени изменения знака wj. И в случае невыполнения по одному из параметров или более условий (2), информация с БПУТВО 19 поступает на первый вход БФВНТВО 20. На второй вход указанного блока поступает также информация из БРМ 9. БФВНТВО 20 формирует подмножество из "к"-вариантов, в котором каждому варианту соответствуют определенные изменения значении .
меняют свои знаки, при этом момент времени события фиксируется БПУТВО 19 по информации с выхода БРМ 9. Для этого выход БРМ 9 подключен к третьему входу указанного блока, по которому информация от датчиков угловой скорости РМ (например, тахогенераторов) поступает на третий вход БПУТВО 19. Одновременно на входы первый и второй БПУТВО 19 поступает информация из БДОР 2 и БДУС 3 о текущем значении параметров pi(t). При этом работа БПУТВО 19 осуществляется по команде на его четвертый вход с БПВРМ 18, одновременно с началом выдачи команд в БФУСРМ 13. В БПУТВО 19 производится проверка выполнения условий (2) по ηi и δi, ранее заложенным в логику работы блока в момент времени изменения знака wj. И в случае невыполнения по одному из параметров или более условий (2), информация с БПУТВО 19 поступает на первый вход БФВНТВО 20. На второй вход указанного блока поступает также информация из БРМ 9. БФВНТВО 20 формирует подмножество из "к"-вариантов, в котором каждому варианту соответствуют определенные изменения значении .
Для проверки всех возможных вариантов "n" в БПВРМ 18 последовательно могут задаваться с БУДН 17 проверочные включения по каждому из маховиков (включая резервный маховик) при различных начальных условиях по вектору кинетического момента в БРМ 9. После проверки всех "n"-х вариантов, информация о "к"-х вариантах поступает с выхода БФВНТВО 20 на первый вход БСВНУПТО 25.
По окончании "прокачки" РМ производим прогноз изменений суммарного вектора кинетического момента на интервале (t0, tк) по команде с первого выхода БУДН 17 на первый вход БПВСКМ 21. Для этого в БПВСКМ 21 из выхода БОВСКМ 5 получаем на четвертый вход информацию о  , из второго выхода БОНП 1 - о навигационных параметрах, из БОУП 10 - об угловой ориентации КА относительно опорного физического базиса соответственно на второй и третий входы. Кроме того, в блок БПВСКМ 21 дополнительно закладываются параметры ρp для указанного прогноза - тензор инерции КА, гравитационные параметры Земли, Луны и Солнца и т.д. из первого выхода БУДН 17 на первый вход БПВСКМ 21. Прогноз осуществляется по результатам интегрирования известных уравнений углового движения КА (см., например, [5], стр.13-15) в указанном блоке, куда указанные параметры ρp закладываются в виде расчетных констант.
, из второго выхода БОНП 1 - о навигационных параметрах, из БОУП 10 - об угловой ориентации КА относительно опорного физического базиса соответственно на второй и третий входы. Кроме того, в блок БПВСКМ 21 дополнительно закладываются параметры ρp для указанного прогноза - тензор инерции КА, гравитационные параметры Земли, Луны и Солнца и т.д. из первого выхода БУДН 17 на первый вход БПВСКМ 21. Прогноз осуществляется по результатам интегрирования известных уравнений углового движения КА (см., например, [5], стр.13-15) в указанном блоке, куда указанные параметры ρp закладываются в виде расчетных констант.
Спрогнозированные значения из БПВСКМ 21 передаются на первый вход в БПВУБУ 22, где производится проверка выполнения условия (1). Туда же на второй вход БПВУБУ 22 передается информация с выхода БДУС 3 о  , на третий вход из БИКМ 4 о значении
, на третий вход из БИКМ 4 о значении  . Указанная информация позволяет определить
. Указанная информация позволяет определить

где IT - тензор инерции КА.
Проверка производится по выполнению условия

При этом в алгоритме работы блока БПВУБУ 22 заложены параметры, описывающие область S.
Если указанное условие не выполняется, то выдается на второй вход БПНУВКМ 26 с третьего выхода БПВУБУ 22 команда на поиск начальных условий по вектору на предстоящий режим ориентации. При этом на первый вход БПНУВКМ 26 заранее задается программа поиска с третьего выхода БУДН 17, например, для поиска  . Для поиска к текущему значению через четвертый вход в БПВУБУ 22 с выхода БПНУВКМ 26 прибавляется значение
. Для поиска к текущему значению через четвертый вход в БПВУБУ 22 с выхода БПНУВКМ 26 прибавляется значение  и далее производится проверка выполнения условия
и далее производится проверка выполнения условия
где 
на "m"-м шаге, где  - прогнозируемые значения вектора кинетического момента на интервале (t0, tк), при этом интервал поиска также задается с БПНУВКМ 26 по тому же каналу. Поиск прекращается на "m"-м шаге при выполнении условия (1)', т.е.
- прогнозируемые значения вектора кинетического момента на интервале (t0, tк), при этом интервал поиска также задается с БПНУВКМ 26 по тому же каналу. Поиск прекращается на "m"-м шаге при выполнении условия (1)', т.е.

при этом получаем промежуточное значение, которое далее должно быть проверено на выполнимость по условиям точности поддержания заданной ориентации. Команда о прекращении поиска (выдачи очередного "m"-го шага) поступает с третьего выхода БПВУБУ 22 на второй вход БПНУВКМ 26. Значение  с первого выхода БПВУБУ 22 выдается на шестой вход БОПУУД 16 для разгрузки.
с первого выхода БПВУБУ 22 выдается на шестой вход БОПУУД 16 для разгрузки.
БРМ 9 от накопленного кинетического момента, где  . При этом, как будет показано далее, разгрузка начнется при условии подтверждения с третьего выхода БСВНУПТО 25 на седьмой вход ББРСРМ 16 выполнения условий точности поддержания ориентации (2).
. При этом, как будет показано далее, разгрузка начнется при условии подтверждения с третьего выхода БСВНУПТО 25 на седьмой вход ББРСРМ 16 выполнения условий точности поддержания ориентации (2).
Если же условие (1) выполняется, то значения суммарного вектора  передается на первый вход БОКМРМРП 23 со второго входа БПВУБУ 22, где по данным с четвертого выхода БОПУУД 12 на предстоящий режим, также передаваемым на второй вход указанного блока, включающим в себя значение
передается на первый вход БОКМРМРП 23 со второго входа БПВУБУ 22, где по данным с четвертого выхода БОПУУД 12 на предстоящий режим, также передаваемым на второй вход указанного блока, включающим в себя значение  KA, производится по (5) определение
KA, производится по (5) определение  для значений
для значений  .
.
Значения поступают с выхода БОКМРМРП 23 на вход БОНВИЗУСМ 24, где по законам управления системой маховиков, производится определение "n"-х вариантов изменения знаков wj Как указывалось ранее, при независимом управлении маховиками по каждой из осей KA, изменению знаков Нх, Ну, Hz, соответствуют изменения знаков wx, wy, wz. Следовательно, определение варианта "n" в соответствии с таблицей 1, производится по изменению знаков Нх, Ну, Hz. В случае отсутствия изменения знаков wj на пятый вход БОПУУД 12 выдается команда из первого выхода БОНВИЗУСМ 24 на поддержание заданной ориентации. Одновременно со второго выхода БОНВИЗУСМ 24 на четвертый вход БПНУВКМ 26 выдается команда на прекращение "m"-го итерационного процесса, с четвертого выхода БОНВИЗУСМ 24 на седьмой вход ББРСРМ 16 проходит команда, подтверждающая прохождение проверки по условиям (2).
При этом, в случае отсутствия , ББРСРМ 16 не реализует программу разгрузки от накопленного кинетического момента.
Если же нет, информация о полученном "n"-м варианте поступает с третьего выхода БОНВИЗУСМ 24 на второй вход БСВНУПТО 25. Туда же была ранее записана информация с БФВНТВО 20 через первый вход БСВНУПТО 25.
В блоке БСВНУПТО 25 путем сравнения производится проверка принадлежности подмножества элементов "к" множеству элементов "n".
В случае отсутствия указанной принадлежности, на четвертый вход БОПУУД 12 выдается команда из первого выхода БСВНУПТО 25 на поддержание заданной ориентации. В противном случае из второго выхода БСВНУПТО 25 выдается команда на третий вход БПНУВКМ 26 на поиск значения  , см. (9). При этом после каждого "m"-го шага проверки условия (1)' и получения производится указанная выше последовательность проверок в блоках БОНИЗУСМ 24 и БСВНУПТО 25. И как только условие к∈n перестает выполняться, поступает команда на третий вход БПНУВКМ 26 из второго входа БСВНУПТО 25 о прекращении итерационного процесса поиска и производится окончательное присвоение
, см. (9). При этом после каждого "m"-го шага проверки условия (1)' и получения производится указанная выше последовательность проверок в блоках БОНИЗУСМ 24 и БСВНУПТО 25. И как только условие к∈n перестает выполняться, поступает команда на третий вход БПНУВКМ 26 из второго входа БСВНУПТО 25 о прекращении итерационного процесса поиска и производится окончательное присвоение  . Для этого выдается из выхода БПНУВКМ 26 на четвертый вход БПВУБУ 22 команда, по которой, в свою очередь, из первого выхода БПВУБУ 22 на шестой вход ББРСРМ 16 передается значение
. Для этого выдается из выхода БПНУВКМ 26 на четвертый вход БПВУБУ 22 команда, по которой, в свою очередь, из первого выхода БПВУБУ 22 на шестой вход ББРСРМ 16 передается значение  .
.
Одновременно с третьего выхода БСВНУПТО 25 на седьмой вход ББРСРМ 16 проходит команда, подтверждающая прохождение проверки по условиям (2).
ББРСРМ 16 осуществляет приведение к  к моменту начала поддержания ориентации до за счет разгрузки БРМ 9 от накопленного кинетического момента. Указанное приведение может осуществляться разными способами разгрузки. Так, например, в системе-прототипе разгрузка производится от сил светового давления при помощи СБ, поэтому в описанный алгоритм (см. [4], стр.16, фиг.5) задается для разгрузки не текущее значение
к моменту начала поддержания ориентации до за счет разгрузки БРМ 9 от накопленного кинетического момента. Указанное приведение может осуществляться разными способами разгрузки. Так, например, в системе-прототипе разгрузка производится от сил светового давления при помощи СБ, поэтому в описанный алгоритм (см. [4], стр.16, фиг.5) задается для разгрузки не текущее значение  , от которого производится разгрузка к нулевому значению, а наперед заданное значение .
, от которого производится разгрузка к нулевому значению, а наперед заданное значение .
В конкретном случае безрасходная разгрузка может потребовать дополнительного времени для приведения суммарного кинетического момента к исходному значению. Поэтому указанный режим поддержания ориентации необходимо готовить заранее. В случае же использования РД для разгрузки (см. [3]) процесс указанного приведения занимает менее продолжительный интервал времени.
Рассматриваемые ограничения (2) на работу системы РМ могут приводить к невыполнению условий на всем интервале (t0, tк), так как возможности указанной системы по понятным причинам областью S ограничены. В таких случаях необходимо провести поиск начальных условий  , обеспечивающих выполнение условий (1) на интервале (t0, tк') максимальном по продолжительности и принадлежащим интервалу (t0, tк).
, обеспечивающих выполнение условий (1) на интервале (t0, tк') максимальном по продолжительности и принадлежащим интервалу (t0, tк).
Максимальная продолжительность интервала (t0, t'к) будет обеспечена при наиболее полном использовании области S системы РМ для управления КА при поддержании заданной ориентации, при этом не должны происходить изменения знаков  .
.
Если начинать процесс управления с нулевыми начальными условиями  , то может произойти быстрое нарушение условий (2), так как функция имеет как постоянную, так и периодическую составляющую (см. [5], фиг.3). Поэтому с известным периодом, два раза за один виток КА составляющие Gx(t), Gy(t) и Gz(t) будут пересекать нулевые значения.
, то может произойти быстрое нарушение условий (2), так как функция имеет как постоянную, так и периодическую составляющую (см. [5], фиг.3). Поэтому с известным периодом, два раза за один виток КА составляющие Gx(t), Gy(t) и Gz(t) будут пересекать нулевые значения.
Более целесообразным, например, является поиск решения, когда управление кинетическим моментом системы РМ будет происходить в одной из восьми подобластей S1, S2...S8, ограниченных поверхностью области S и восьмью квадратами, образованными осями связанного базиса OXYZ (см. фиг.8). При этом начало пути годографа вектора происходит с поверхности области S.
Если апроксимировать область S сферой радиусом Rсф, то для указанного управления в пределах подобласти S1, необходимо задать начальные условия

Далее задаем номер начальных условий, например, n1 с четвертого выхода БУДН 17 на пятый вход БПНУВКМ 26, соответствующий (10). Одновременно с первого выхода БУСУДН 17 на первый вход БПВСКМ 21 выдается команда на прогноз .
Из БПНУВКМ 26 на четвертый вход БПВУБУ 22 передаются начальные условия для проверки
где момент времени t'1к соответствует моменту времени выхода на границу области S.
Значение полученного интервала (t0, t'1к) пересылается на третий вход БОНУМПР 27 из четвертого выхода БПВУБУ 22.
Далее в процессе проверки условий (2) по вышеуказанному алгоритму на первый вход БОНУМПР 27 с пятого выхода БОНИЗУСМ 24 записывается момент времени t'1км, изменения знаков. При этом значения t'1км запоминаются окончательно по подтверждению нарушения условий ориентации (невыполнении условия (2)) с четвертого выхода БСВНУПТО 25 на второй вход БОНУМПР 27.
Далее проверяются следующие начальные условия

Таким образом в БОНУМПР 27 формируется матрица-столбец из восьми строк
По наименьшему из значений Δt'1к, Δt'2к,...,Δt'8к матрицы (12) выбирается вариант начальных условий по вектору кинетического момента . Значения вариантов для поиска закладываются в виде компонент вектора начальных условий с пятого выхода БУСУДН 17 на четвертый вход БОНУМПР 27.
Далее в БОНУМПР 27 после проверки всех вариантов поиска определяется значение

которое пересылается на шестой вход ББРСРМ 16.
При этом БСВНУПТО 25 по началу выдачи информации в БОНУМПР 27 открывает седьмой вход в ББРСРМ 16 для записи  в алгоритм разгрузки.
в алгоритм разгрузки.
После разгрузки на величину или и тем самым приведения к  или
или  из выхода БОВКСМ 5 на третий вход БОПУУД 10 поступают полученные значения суммарного вектора кинетического момента.
из выхода БОВКСМ 5 на третий вход БОПУУД 10 поступают полученные значения суммарного вектора кинетического момента.
В указанном БОПУУД 12 происходит сравнивание значений и с заложенными ранее в указанный блок значениями  и . При этом закладка указанных значений, по мере их получения в БПВУБУ 22 и БОНУМПРО 27, производится с пятого выхода и второго выхода соответственно на шестой вход БОПУУД 12. Совпадение указанных прогнозных и полученных значений служит условием начала режима поддержания заданной ориентации, реализуемого БОПУУД 12.
и . При этом закладка указанных значений, по мере их получения в БПВУБУ 22 и БОНУМПРО 27, производится с пятого выхода и второго выхода соответственно на шестой вход БОПУУД 12. Совпадение указанных прогнозных и полученных значений служит условием начала режима поддержания заданной ориентации, реализуемого БОПУУД 12.
Второй "вариантный" контур поиска начальных условий для дает возможность задавать любые варианты начальных условий для поиска, исходя из мотивации разработчика алгоритма.
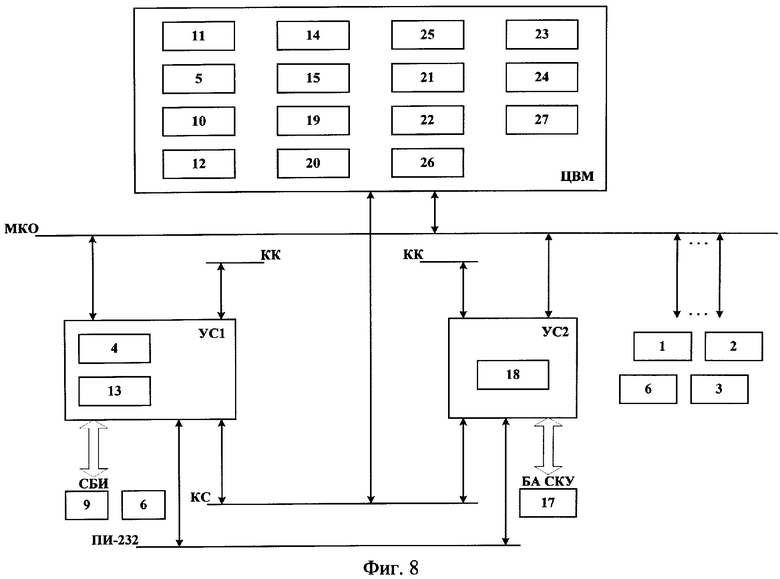
Примером для возможной аппаратной реализации предложенного способа может служить бортовая цифровая вычислительная система (БЦВС) КА "Ямал" (см. [7]).
БЦВС предназначена для выполнения следующих основных функций:
- представления служебным системам КА (в том числе СУДН) вычислительных ресурсов в реальном масштабе времени;
- получение необходимой информации, обработка по заданным алгоритмам, выдача управляющих воздействий, хранение информации;
- обеспечение информационного обмена между БЦВС и служебными системами;
- сбор телеметрической информации о состоянии бортовых систем, формирования кадра ТМИ и выдача в служебный канал управления (СКУ), диагностика, управление резервами и программно-аппаратными ресурсами;
- обеспечение взаимодействия бортового контура управления (БКУ) с наземным контуром управления (НКУ) с помощью интерфейсов служебного канала управления.
В состав БЦВС входят цифровые вычислительные машины (ЦВМ) и устройства сопряжения (УС).
Связь ЦВМ с УС, датчиками СУДН осуществляется по магистрали мультиплексного канала обмена (МКО), выполненному в соответствии с ГОСТ.
Реализация блоков 1-16 подробно представлена в прототипе, см. [4].
Реализация БУДН 17 может быть осуществлена средствами НКУ, при этом функциональные связи с остальными блоками, входящими в состав БКУ, могут быть реализованы блоками автоматики БА СКУ, имеющими взаимный наземно-бортовой интерфейс [7, 8].
Блоки с 18 по 27 имеют программно-логическое назначение и тем самым не требуют электросиловой коммутации. Поэтому они реализуются на базе УС и ЦВМ через МКО. При этом связь с датчиковой аппаратурой и МКО осуществляет система бортовых измерений (СБИ).
В конкретном случае СБИ производит сбор телеметрической информации (реализует телеметрические функциональные связи между блоками); обеспечивает выдачу по каналу МКО текущей информации ЦВМ; обеспечивает связь между блоками по приборному интерфейсу (например, ПИ-232) текущей информации.
На фиг.8 представлена схема реализации "Системы..." на базе БЦВС КА, при этом, кроме ранее введенных, приняты новые сокращения:
КК - коммутационный канал;
КС - канал синхронизации.
БУДН 17 реализован на базе управляющего информационно вычислительного комплекса (УИВК) земной станции ЗС СКУ (станция КИС, см. [8], рис.7.1). БАСКУ связана посредством радиосигналов с ЗС СКУ. Команда на дополнительные проверочные включения по j-му РМ, (например, первому) выдается через передатчик ЗС СКУ на приемник БАСКУ.
УС 2 обеспечивает прием по командному интерфейсу (стандарт RS-422) команды, поступающей из ЗС СКУ. На базе УС 2 реализован БПВРМ 18. По указанной команде УС 2 выдает унитарный код через МКО в УС 1, на базе которого реализован БФУСРМ 13 (см. [4]). Порядок следования и число импульсов в указанном коде, соответствует знаку и величине угловой скорости вращения РМ. В БФУСРМ 13 с БОПУУД 12 передаются также прямые функциональные массивы данных управления РМ, которые формирует БОПУУД 12. После формирования в УС 1 (БФУСРМ 13), указанные импульсы выдаются в БРМ 9 по выходному каналу управления.
БПТВО 19, реализованный на базе ЦВМ, получает через СБИ КА→УС 1→МКО информацию о знаках  с выходов БРМ 9.
с выходов БРМ 9.
Для реализации функций БПТВО 19 ЦВМ получает по МКО информацию с БДОР 2 и БДУС 3. При этом работа алгоритма осуществляется по команде с УС 2 (БПВРМ 18) одновременно с выдачей команд в УС1 (БФУСРМ 13).
Необходимые константы для работы алгоритмов БПТВО 19 на вычислительных ресурсах ЦВМ закладываются через УИВК (с БУСУДН 17).
Блок БФВНТВО 20 реализуется на базе ЦВМ, при этом в него поступает информация по результатам работы алгоритма БПТВО 19 внутри ЦВМ, а также по информационному обмену через УС 1, с БРМ 9.
Необходимо также отметить, что БЦВС производит сбор телеметрической информации (ТМИ) о состоянии бортовых систем и приборов КА и выдачу ее в БАСКУ. В свою очередь БА СКУ передает информацию ЗС СКУ, где устройство обработки ТМИ обеспечивает контроль и диагностику при работе систем КА, в том числе обеспечивается контроль окончания работы выбранного маховика в проверочном режиме.
Далее через УИВК ЗССКУ (БУДН 17) выдаются команды на каждый из j-x маховиков для проверки всех возможных вариантов "n". После проверки указанных вариантов в БСВНУПТО 25 записывается с БФВНТВО 20 информация о "к"-х вариантах управления системой СГ. Запись производится в соответствии с работой описанных ранее алгоритмов. При этом команда на завершение режима "прокачки" маховиков выдается через БУДН 17 по указанному ранее пути.
По той же команде в ЦВМ производится прогноз изменений вектора на интервале (t0, tк), тем самым реализуется логика работы БПВСКМ 21. Для этого из БОКСМ 5 по внутреннему алгоритмическому обмену ЦВМ выдается значение G(t0). Для решения указанной задачи, в свою очередь, ЦВМ использует принятую информацию через МКО от БРМ 9, БОНП 1, БДУС 3. Дополнительно также используется информация, полученная в БОУП 10 (см. [4]).
Необходимые константы, задающие параметры pp, закладываются в ЦВМ, через УС 2, БАСКУ с УИВК ЗССКУ. За счет вычислительных ресурсов ЦВМ в БПВУБУ 22 реализуется алгоритм проверки условия (10).
В случае невыполнения указанного условия при помощи БПНУВК 26, БОНУМПР 27 в соответствии с алгоритмами, сформированными по выражениям (11)-(15), осуществляется поиск начальных условий для , обеспечивающих поддержание заданной ориентации с соблюдением требуемых условий по точности ее выполнения. Указанная логика осуществляется за счет вычислительных ресурсов ЦВМ. При этом используются межалгоритмические связи внутри вычислительного процесса, реализуемого ЦВМ, а также связи через МКО по указанным ранее путям получаемой внешней для ЦВМ информации.
После получения начальных условий или , указанная информация алгоритмически пересылается в БОУМТО 15 для формирования требуемого управляющего момента от сил светового давления для разгрузки БРМ 9. Описание работы БОУМТО 15 в совокупности с другими блоками и системами, составляющими ББРСРМ 16, подробно представлено в [4].
В дополнение к работе устройства в целом необходимо отметить, что связь с устройствами УС 1, УС 2 и датчиками СУДН (БДОР, БДУС) осуществляется по дублированной магистрали мультиплексного канала обмена - МКО. ЦВМ выполняет функции контроллера МКО, другие абоненты являются оконечными устройствами интерфейса. УС 2 обеспечивает выдачу внешнего синхросигнала "метка цикла" с периодичностью 203 мс в другой УС, ЦВМ (дублирующие УС и ЦВМ) по каналу синхронизации (КС).
ЦВМ запрашивает из УС 1 массивы данных в виде сформированных кадров, содержащих значение дискретных, аналоговых, температурных, диагностических и статусных параметров.
Все кадры должны формироваться один раз в такт 203 мс. Подробное описание БЦВС, см. [9].
Положительный результат от предлагаемого технического решения заключается в обеспечении высокой точности поддержания заданной ориентации при управлении КА с помощью реактивных маховиков. Точность достигается за счет исключения изменения знаков угловыми скоростями роторов маховиков на интервале времени непосредственного проведения эксперимента, что, в свою очередь, приводит к исключению "релейного" типа управляющих воздействий от реактивных маховиков на корпус КА (см. фиг.3, 4, 5). Без решения указанной задачи целый ряд экспериментов на борту КА не обеспечивался бы требованиями задаваемым техническим условиям на их проведение. К ним, прежде всего, необходимо отнести условие наблюдения и фотографирования Земли из космоса. Высокая разрешающая способность аппаратуры, используемой на борту КА для этих целей, приводит к высоким требованиям к точности выполнения ориентации.
Несоответствие указанным требованиям приведет к потерям полетного ресурса КА, непродуктивному использованию бортовой аппаратуры полезной нагрузки.
Источники информации
1. Б.В.Раушенбах, Е.Н.Токарь. Управление ориентацией космических аппаратов. М.: Наука, 1974 г.
2. Л.А.Мирошниченко, В.А.Раевский, Г.М.Маркелов. Система ориентации и стабилизации спутника телевизионного вещания "Экран". Техническая кибернетика. №7-1977, стр.18-26.
3. В.С.Ковтун, В.Н.Платонов. Способ управления КА с помощью реактивных исполнительных органов при выполнении режимов ориентации. Патент РФ 2066287.
4. А.В.Богачев, В.С.Ковтун, В.Н.Платонов. Способ формирования управляющих моментов на КА с силовыми гироскопами и поворотными солнечными батареями и система для его осуществления. Патент РФ 2196710.
5. В.С.Ковтун, Ю.Р.Банит. Способ управления КА с помощью силовых гироскопов и реактивных двигателей, расположенных под углом к осям связанного базиса. Патент РФ 2197412.
6. В.С.Ковтун, В.Н.Платонов, Н.А.Суханов, С.Б.Величкин, С.И.Гусев. Система управления ориентацией КА с силовыми гироскопами. Патент РФ 2006430.
7. Основные характеристики КА "Ямал" РКК "Энергия" им. С.П.Королева. Королев, 2000 г.
8. Спутниковая связь и вещание. Под редакцией Л.Я.Кантора. М.:осква, Радио и связь, 1997 г.
9. Бортовая цифровая вычислительная система КА "Ямал". Техническое описание. РКК "Энергия", 1999 г.
Способ управления космическим аппаратом при поддержании заданной ориентации с помощью реактивных маховиков и система для его осуществления.
Таблица вариантов изменения знаков
0 - нет изменения знака
Изобретения относятся к способам и системам управления угловым движением космических аппаратов (КА). Предлагаемый способ включает измерение параметров ориентации КА на полетном интервале, формирование реактивными маховиками (РМ) управляющего момента, измерение текущих векторов угловых скоростей РМ, определение вектора  суммарного кинетического момента КА. Если принадлежит области S его располагаемых значений, то управляют КА без разгрузки РМ, а если нет - то с разгрузкой РМ. При управлении КА проверяют n-е варианты изменения знаков угловых скоростей РМ, перераспределяя кинетический момент между РМ, и контролируют условие нахождения параметров ориентации в допустимых диапазонах. При выполнении данного условия продолжают управление КА, а при нарушении - фиксируют соответствующие k-e варианты изменения знаков угловых скоростей РМ. По завершении отработки всех n вариантов изменения знаков угловых скоростей РМ прогнозируют изменения вектора на последующем полетном интервале, выделяя из вектор
суммарного кинетического момента КА. Если принадлежит области S его располагаемых значений, то управляют КА без разгрузки РМ, а если нет - то с разгрузкой РМ. При управлении КА проверяют n-е варианты изменения знаков угловых скоростей РМ, перераспределяя кинетический момент между РМ, и контролируют условие нахождения параметров ориентации в допустимых диапазонах. При выполнении данного условия продолжают управление КА, а при нарушении - фиксируют соответствующие k-e варианты изменения знаков угловых скоростей РМ. По завершении отработки всех n вариантов изменения знаков угловых скоростей РМ прогнозируют изменения вектора на последующем полетном интервале, выделяя из вектор  кинетического момента системы РМ. По прогнозу определяют варианты изменения знаков векторов угловых скоростей РМ на указанном интервале и сравнивают их с предыдущими k-ми вариантами. По результатам сравнения для дальнейшего управления отыскивают начальные условия для вектора
кинетического момента системы РМ. По прогнозу определяют варианты изменения знаков векторов угловых скоростей РМ на указанном интервале и сравнивают их с предыдущими k-ми вариантами. По результатам сравнения для дальнейшего управления отыскивают начальные условия для вектора  , обеспечивающие выполнение определенных условий на перемену знаков угловых скоростей РМ, принадлежности значений области S и допустимости параметров ориентации КА. При этом возможна коррекция длительности полетного интервала. Для реализации способа предложена система управления с блоком безрасходной разгрузки РМ и другими соответствующими блоками и связями между ними. Технический результат изобретений направлен на исключение скачкообразного изменения управляющих моментов РМ и повышение ввиду этого точности поддержания заданной ориентации КА. 2 н.п. ф-лы. 8 ил., 1 табл.
, обеспечивающие выполнение определенных условий на перемену знаков угловых скоростей РМ, принадлежности значений области S и допустимости параметров ориентации КА. При этом возможна коррекция длительности полетного интервала. Для реализации способа предложена система управления с блоком безрасходной разгрузки РМ и другими соответствующими блоками и связями между ними. Технический результат изобретений направлен на исключение скачкообразного изменения управляющих моментов РМ и повышение ввиду этого точности поддержания заданной ориентации КА. 2 н.п. ф-лы. 8 ил., 1 табл.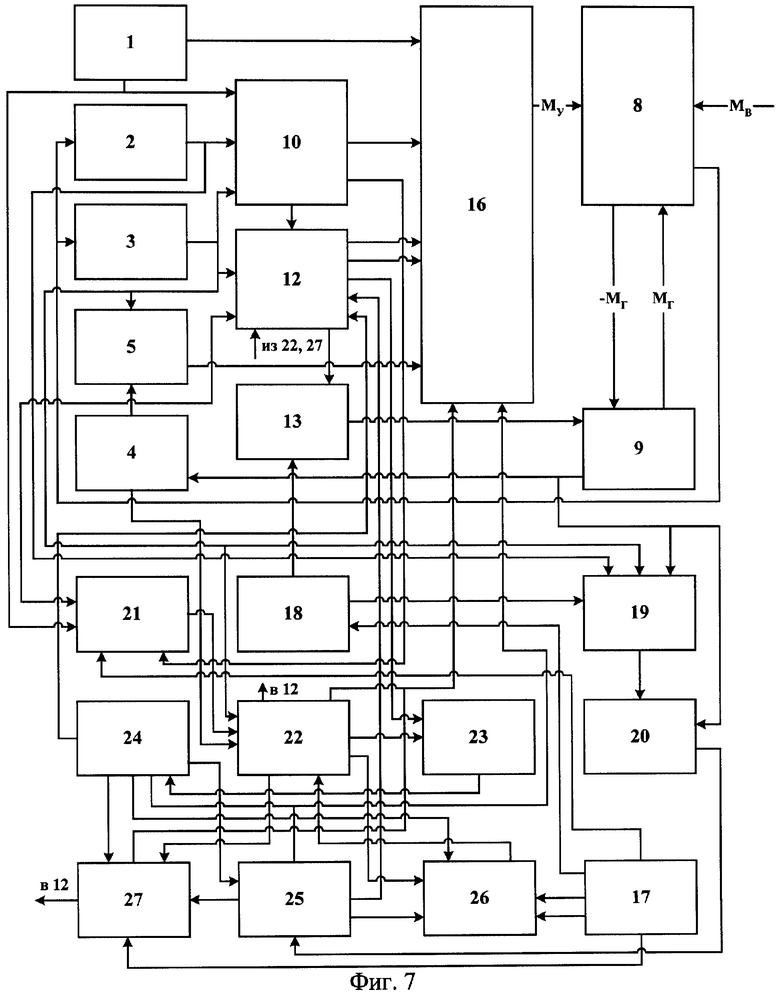
 , измерение текущих значений векторов угловых скоростей
, измерение текущих значений векторов угловых скоростей  вращения j-ых реактивных маховиков, где j=1, 2, 3,...J - число реактивных маховиков, определение значений вектора суммарного кинетического момента космического аппарата
вращения j-ых реактивных маховиков, где j=1, 2, 3,...J - число реактивных маховиков, определение значений вектора суммарного кинетического момента космического аппарата  по известным значениям моментов инерции аппарата и его реактивных маховиков, а также по измеренным значениям векторов и , проверку выполнения условия
по известным значениям моментов инерции аппарата и его реактивных маховиков, а также по измеренным значениям векторов и , проверку выполнения условия
где S - область располагаемых значений вектора кинетического момента реактивных маховиков, и в случае выполнения указанного условия на интервале (t0, tк) - поддержание заданной ориентации без разгрузки реактивных маховиков от накопленного кинетического момента, а в случае невыполнения указанного условия - разгрузку реактивных маховиков от накопленного кинетического момента, отличающийся тем, что при поддержании ориентации производят последовательную проверку n возможных вариантов изменения знаков, задающих направления указанных векторов , где n=1, 2, 3..., путем перераспределения кинетического момента между реактивными маховиками и в моменты времени изменения знаков векторов проверяют выполнение условий

где ηi - номинальные значения измеряемых i-х параметров ориентации, обеспечивающих поддержание заданной ориентации космического аппарата в пределах допустимых диапазонов; δi - величины, определяющие допустимые диапазоны на i-e параметры ориентации космического аппарата, и в случае выполнения условия (2) по всем i-м параметрам продолжают поддержание ориентации космического аппарата, а в случае его невыполнения - фиксируют соответствующие данному случаю k-e варианты изменения знаков векторами  , продолжая поддержание ориентации космического аппарата до завершения всех указанных n-х вариантов изменения знаков векторами , а по окончании поддержания указанной ориентации прогнозируют изменения вектора на последующем интервале (t0, tк) и по результатам прогноза выделяют из вектора составляющую
, продолжая поддержание ориентации космического аппарата до завершения всех указанных n-х вариантов изменения знаков векторами , а по окончании поддержания указанной ориентации прогнозируют изменения вектора на последующем интервале (t0, tк) и по результатам прогноза выделяют из вектора составляющую  суммарного вектора кинетического момента реактивных маховиков, далее по полученным значениям определяют изменения знаков векторами на указанном интервале, по которым, в свою очередь, определяют n-е варианты изменения знаков векторами , сравнивают их с k-ми вариантами изменения знаков этими векторами и, в случае несовпадения этих вариантов - поддержание заданной ориентации космического аппарата реактивными маховиками производят с начальными условиями
суммарного вектора кинетического момента реактивных маховиков, далее по полученным значениям определяют изменения знаков векторами на указанном интервале, по которым, в свою очередь, определяют n-е варианты изменения знаков векторами , сравнивают их с k-ми вариантами изменения знаков этими векторами и, в случае несовпадения этих вариантов - поддержание заданной ориентации космического аппарата реактивными маховиками производят с начальными условиями  , а в случае совпадения указанных n-х и k-х вариантов производят поиск начального условия
, а в случае совпадения указанных n-х и k-х вариантов производят поиск начального условия  , при котором управление реактивными маховиками не приводит к изменению знаков векторами при одновременном выполнении условия (1) на интервале (t0, tк), в случае же невыполнения условия (1) на указанном интервале, определяют начальные условия
, при котором управление реактивными маховиками не приводит к изменению знаков векторами при одновременном выполнении условия (1) на интервале (t0, tк), в случае же невыполнения условия (1) на указанном интервале, определяют начальные условия  , обеспечивающие выполнение условий (1) и (2) на интервале (t0, t'к), максимальном по продолжительности и принадлежащем интервалу (t0, tк), далее к моменту времени to начала поддержания ориентации производят приведение суммарного вектора кинетического момента космического аппарата к одному из найденных начальных условий или путем разгрузки реактивных маховиков от накопленного кинетического момента и поддерживают заданную ориентацию с помощью реактивных маховиков до момента завершения интервала (t0, tк) или (t0, t'к) соответственно.
, обеспечивающие выполнение условий (1) и (2) на интервале (t0, t'к), максимальном по продолжительности и принадлежащем интервалу (t0, tк), далее к моменту времени to начала поддержания ориентации производят приведение суммарного вектора кинетического момента космического аппарата к одному из найденных начальных условий или путем разгрузки реактивных маховиков от накопленного кинетического момента и поддерживают заданную ориентацию с помощью реактивных маховиков до момента завершения интервала (t0, tк) или (t0, t'к) соответственно.
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ МОМЕНТОВ НА КОСМИЧЕСКИЙ АППАРАТ С СИЛОВЫМИ ГИРОСКОПАМИ И ПОВОРОТНЫМИ СОЛНЕЧНЫМИ БАТАРЕЯМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2196710C2 |
| СПОСОБ УПРАВЛЕНИЯ КИНЕТИЧЕСКИМ МОМЕНТОМ КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ КОРРЕКЦИИ ОРБИТЫ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2209160C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ, СНАБЖЕННЫМ РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ С НАПРАВЛЕННЫМИ ПОД УГЛОМ К ОСЯМ СВЯЗАННОГО БАЗИСА И СМЕЩЕННЫМИ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС АППАРАТА ЛИНИЯМИ ДЕЙСТВИЯ ТЯГ, СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА, БЛОК РЕАКТИВНЫХ ДВИГАТЕЛЕЙ СИСТЕМЫ | 1997 |
|
RU2124461C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ РЕАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ ПРИ ПОДДЕРЖАНИИ ЗАДАННОЙ ОРИЕНТАЦИИ | 1996 |
|
RU2112713C1 |
| US 6089508 A; 18.07.2000. | |||

