Изобретение относится к измерительной технике и может быть использовано для определения частотно-временных параметров высокостабильных генераторов (мер времени и частоты), размещенных на подвижных объектах, например самолетах или навигационных космических аппаратах (НКА) системы "ГЛОНАСС".
Известен наиболее близкий к изобретению по техническому решению способ определения частотно-временных параметров высокостабильных генераторов, который по существу сводится к определению запросной и беззапросной дальности до НКА.
Рассмотрим подробнее способ определения шкал времени бортовой и наземной аппаратуры [1]. По запросу с Земли бортовая аппаратура излучает сигнал, несущий информацию о бортовой шкале времени. Излучается импульс, временное положение которого совпадает с секундной меткой бортовой шкалы. В наземной аппаратуре осуществляется измерение временного интервала между моментом приема сигнала с борта и ближней секундной отметкой наземной шкалы.
Очевидно, что поправка U к шкале бортового времени связана с измеренным интервалом Δt и временем распространения сигнала τp соотношением
U= Δt-τp. (1)
Учет непрерывно изменяющегося времени распространения сигнала может выполняться при обработке результатов измерений расхождения шкал времени в соответствии с соотношением (1). При этом обычно имеется возможность достаточно точного учета времени распространения сигнала, например по результатам измерения запросной дальности τp=D/C, где D - запросная (наклонная) дальность до НКА; C - скорость света.
Так как разработанные способы непосредственного сравнения частот при больших расстояниях обладают большой погрешностью [1], то для сравнения частот высокостабильных генераторов в настоящее время применяются способы, связанные с использованием с результатов измерений расхождений шкал времени, сформированных исследуемыми генераторами и реализуется двухкратным измерением расхождений шкал времени. Если U1 и U2 - суть расхождения шкал времени соответственно при первой и второй сверках, то искомая величина расхождения частот определяется соотношением
где
fэ - номинальное значение частоты исследуемых генераторов;
Δt - уход одной шкалы относительно другой за время Tн, обусловленный различием действительных значений частот.
Соотношение (2) используется при сравнении частот наземных неподвижных генераторов.
При сравнении этим способом частот бортового и наземного генераторов необходимо дополнительно учитывать эффекты Доплера первого и второго порядка и гравитационное смещение частоты. Порядок учета этих эффектов описан в [3], поэтому подробно на этом останавливаться не будем.
Из известных этот способ сравнения частот является наиболее высокоточным, но он обладает существенными недостатками: требует большого интервала времени измерения (накопления информации) и обладает малой оперативностью.
Анализ выражения (2) показывает, что средняя квадратическая погрешность определения относительной разности частот бортового и наземного генераторов обратно пропорциональна времени измерения (наблюдения НКА). Так, если требуется определить указанным способом относительную разность частот бортового и наземного генераторов со средней квадратической погрешностью σ(Δf/f)=1•10-12,, при σ(Δt)≤ 100нс,, то время наблюдения НКА должно составлять Tн = 27 ч, т.е. более суток, что снижает оперативность закладки частотно-временной информации на борт НКА. На коротких интервалах времени этот способ не обладает достаточной точностью. Так, при Tн = 1 ч и σ(Δt)≤ 100нс величина σ(Δf/f)~1•10-10, что не обеспечивает потребности современных радионавигационных систем [4].
Цель изобретения - повышение точности частотно-временной синхронизации мер времени и частоты, размещенных на подвижных объектах, на коротких интервалах времени.
Поставленная цель достигается тем, что на основе полученных аналитических соотношений, связывающих частотно-временные измерения при синхронизации бортовых мер времени и частоты в одной зоне радиовидимости НКА, разработан новый способ синхронизации этих мер.
Для большей наглядности основных выводов рассмотрим средневысотный НКА, движущийся по круговой орбите.
При этом примем следующие допущения [5]:
1. Земля является сферой радиуса Rз = 6371 км.
2. Движение спутника происходит под действием только силы притяжения Земли.
3. Ускорение силы земного притяжения всегда направлено к центру Земли, и его абсолютная величина g определяется по формуле Ньютона
где
R - расстояние от центра Земли до спутника;
μ - коэффициент, равный произведению гравитационной постоянной на массу Земли.
С точностью, достаточной для решения ряда практических задач, можно считать, что
μ=3986•105 км3/с2.
4. Величина и направление начальной скорости спутника (скорости вывода его на орбиту) подобраны из условия получения круговой орбиты.
При принятых выше допущениях, с учетом релятивистских эффектов, измеренная на неподвижном объекте разность частот Δfизм между частотой fн генератора неподвижного объекта и частотой fб бортового генератора НКА определяется соотношением [3-6] (3)
(3)
где
β - релятивистское отношение скорости движения объекта Vc к скорости света C;
ϕ - угол между радиус-вектором и вектором скорости КА, измеренный в системе отсчета, связанной с подвижным объектом (фиг. 1).
Разложив выражение (3) в ряд по степеням β и пренебрегая членами выше второй степени, получаем [7]
Δfизм=fн-fб(1-βcosϕ-β2/2+β2cos2ϕ). (4)
Если ограничиться двумя первыми членами разложения (4), то получим приближенное выражение для измеренной на неподвижном объекте разности частот Δfизм:
Δfизм=fн-fб(1-βcosϕ). (5)
Будем считать, что частота наземного генератора fн равна частоте бортового генератора fб (fн = fб), тогда выражение (5) можно переписать в виде
Δfизм=βfбcosϕ . (6)
Соответствующая измеренная разность шкал времени наземного и бортового генераторов, связанных с системой отсчета наземного генератора, с учетом (6) будет иметь вид [2]: (7)
(7)
где Uн = Uн-б(tн) - начальное (на момент времени tн) значение измеренной разности шкал времени.
Первая частная производная функции Uн-б(t) по времени равна (8)
(8)
Момент времени tмин достижения Uн-б(t) своего минимального значения (dUн-б(t)/dt = 0) будет при cos ϕ (tмин) = 0, тогда (9)
(9)
что соответствует моменту времени t0(tмин = t0) прохождения КА непосредственно над радиоприемником наземного генератора (точка траверза).
Рассмотрим случай, когда частота наземного генератора не равна частоте бортового генератора и отсутствует систематическое изменение частоты (Δfн-б=fн-fб=const), что соответствует принятой в КНС "ГЛОНАСС" модели функционирования средств частотно-временного обеспечения [2]. Тогда выражение (5) будет иметь вид . (10)
. (10)
Соответствующая измеренная разность шкал времени наземного и бортового генераторов, связанных с системой отсчета наземного генератора, с учетом (10) запишется как: (11)
(11)
Первую частотную производную функции Uн-б(t) по времени из (11) запишем (12)
(12)
Обозначив 
получим (13)
(13)
Соответствующий момент времени tмин достижения Uн-б(t) своего минимального значения (dUн-б(t)/dt = 0) будет иметь вид (14)
(14)
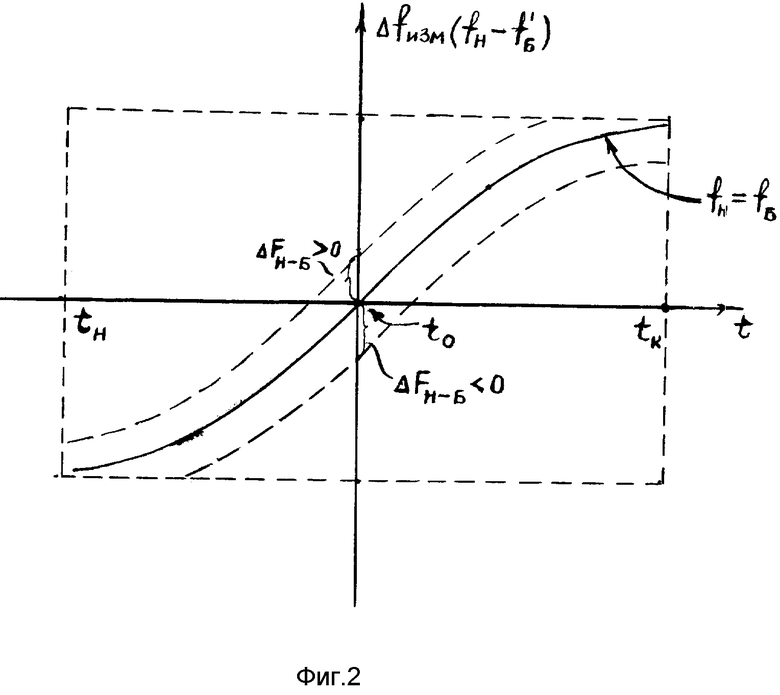
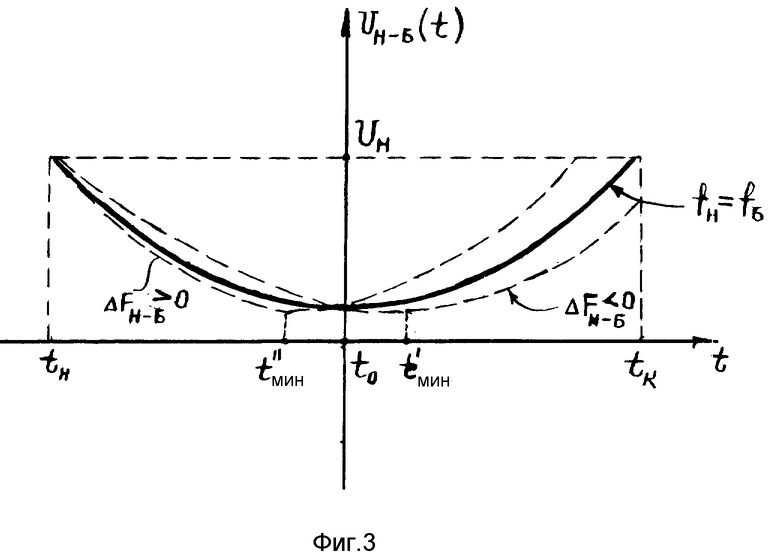
Сопоставление выражений (9) и (14) показывает, что, если разность частот бортового и наземного генераторов не равна нулю (Δfн-б≠0), т.е. частота бортового генератора не равна частоте наземного генератора (fн≠fб), то момент времени tмин нахождения минимальной разности бортовой и наземной шкал времени Uн-б(t) не соответствует времени t0 прохождения источника излучения (НКА) непосредственно над радиоприемником неподвижного объекта (точкой траверза). Причем разность моментов времени tмин - t0 несет информацию о разности частот бортового и наземного генераторов.
Действительно, накопленная разность бортовой и наземной шкал времени за определенный интервал времени Tн обусловлена разностью частот соответствующих генераторов за этот же интервал времени.
Так как измеренная разность частот бортового и наземного генераторов в системе отсчета наземного генератора в точке траверза не равна нулю, то и соответствующий момент времени tмин минимальной разности бортовой и наземной шкал времени не соответствует моменту времени t0(tмин-t0), как показано на фиг. 2 и 3.
Приведем выражение (14) к виду (15)
(15)
Предварительный анализ выражения (15) показывает, что существует принципиальная возможность определения относительной разности частот бортового и наземного генераторов в одной зоне радиовидимости КА, если измерить скорость Vс движения КА и угол между плоскостью распространения радиоволн, излученных бортовым передатчиком и направлением на наземный генератор в момент tмин, когда Uн-б(t), т.е. измеренная разность шкал времени бортового и наземного генераторов, минимальна.
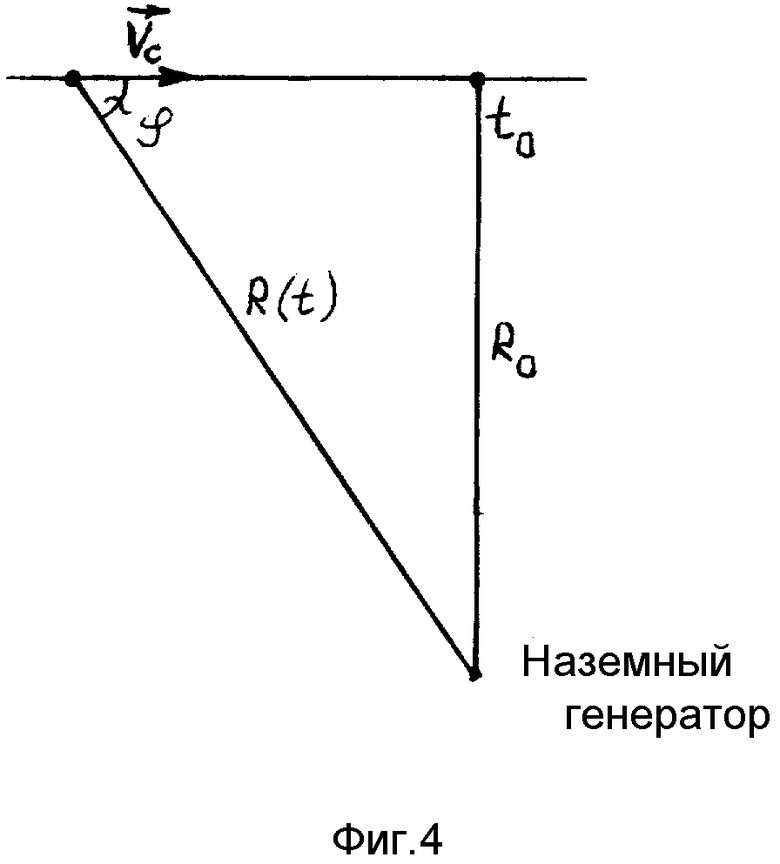
Величина ϕ(tмин) = arccos(afн/β(1-afн)) при условии использования высокостабильного генератора afн=1•10-10 - 1•10-12) на борту средневысотного КА (β=2•10-5) близка к 90o, поэтому можно считать [8], что на участке траектории полета КА, соответствующему интервалу времени от момента t0 до момента tмин, движение является прямолинейным и равномерным (фиг. 4).
В этом случае выражение для cosϕ(t) будет иметь вид (16)
(16)
где
t0 - момент времени прохождения движущегося объекта непосредственно над радиоприемником неподвижного объекта (точка траверза);
R0 - высота орбиты КА.
Подставляя (16) в (11) и используя первую подставновку Эйлера для нахождения интеграла, получим (17)
(17)
Введем обозначение aр=Vс 2/СR0 и перепишем выражение (17) в виде
Uн-б(t)=Uн+afн(t-tн)+1/2aр х (1-afн)(t-tн) х (t-2t0+tн). (18)
Первая частная производная функция Uн-б(t) по времени с учетом выражения (18) имеет вид (19)
(19)
Соответствующий момент времени tмин достижения Uн-б(t) своего минимального значения (dUн-б(t)/dt=0) будет (20)
(20)
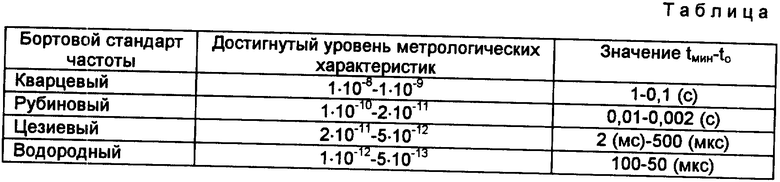
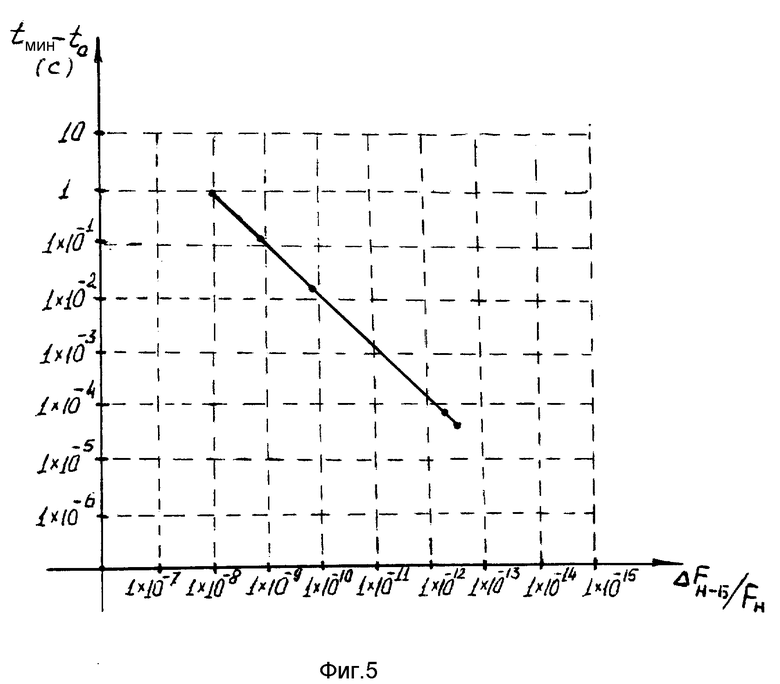
В таблице и на фиг. 5 приведены значения разностей, полученные в соответствии с выражением (20) для различных типов бортовых мер частоты и времени.
Приведем выражение (20) к виду (20)
(20)
Таким образом, относительная разность частот бортового и наземного генераторов на одном витке КА может быть определена в соответствии с (21).
Исходными данными для расчета являются разность моментов времени прохождения движущегося объекта непосредственно над радиоприемником неподвижного объекта (точкой траверза) t0 и момент времени tмин нахождения минимальной разности бортовой и наземной шкал времени, а также параметры орбиты НКА - орбитальная скорость движения Vс и высота орбиты R0 известные априорно или полученные в процессе сеанса измерений. При этом следует отметить, что разность моментов времени tмин и t0 составляет для КНС "ГЛОНАСС" величину от 1 с до 50 мкс, в зависимости от типа бортового стандарта частоты (см. таблицу и фиг. 5), что может быть измерено современными техническими средствами, применяемыми в наземном комплексе управления КНС.
Рассмотрим возможности технической реализации предлагаемого способа. Материальным объектом, на котором может быть реализован предлагаемый способ, является совмещенная радиотехническая система (РТС), в которой имеется запросный и беззапросный фазовые каналы измерения дальности (например, СУИК - система управления измерения и контроля КНС "ГЛОНАСС"). При этом момент времени tмин нахождения минимальной разности наземной и бортовой шкал времени может быть определен в беззапросном канале измерения дальности ОТС, а момент времени t0 нахождения точки траверза в запросном канале измерения дальности РТС (в этом случае получаемые измерения дальности не зависят от частоты бортового генератора). Остальные исходные данные, необходимые для расчета относительной разности частот бортового и наземного генераторов в соответствии с выражением (21), а именно орбитальная скорость Vc движения КА и высота орбиты R0 измеряются известными методами [8] радиотехническими средствами наземного комплекса управления (НКУ) или передаются потребителю в составе эфемеридной информации.
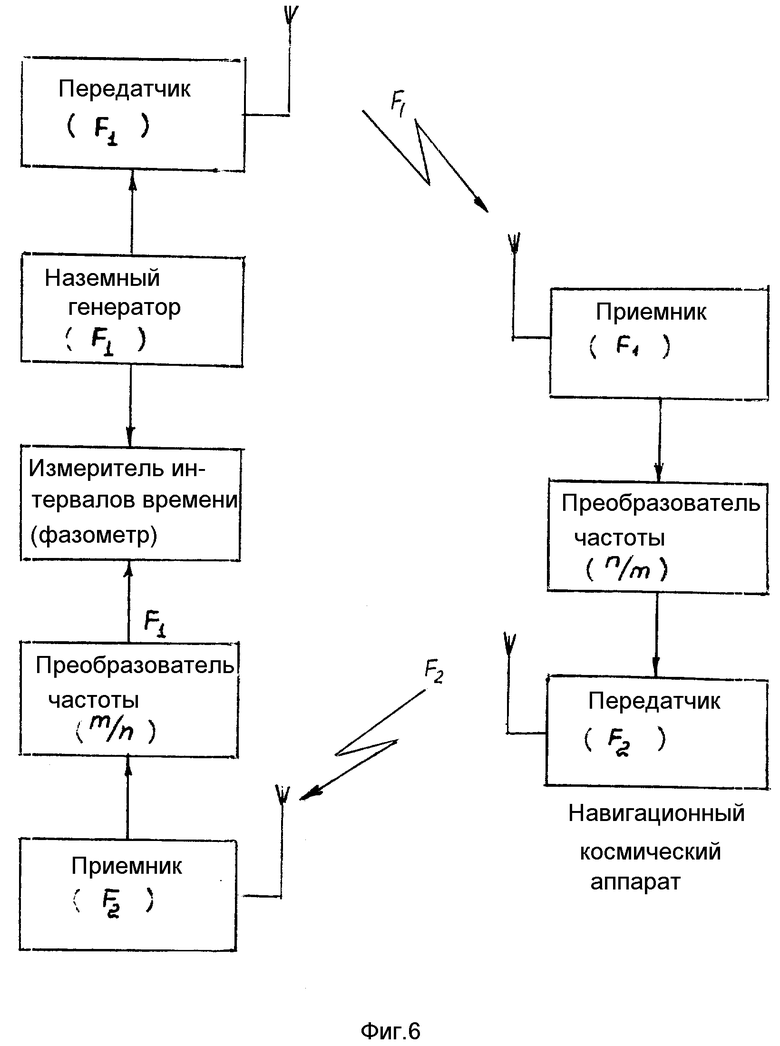
Порядок определения разности моментов времени tмин и t0 следующий. Момент времени t0 находится в запросном канале измерения дальности РТС. В этом случае на наземном пункте и на борту НКА устанавливается приемопередающая аппаратура в соответствии с тем, как показано на фиг. 6. Высокочастотные колебания частоты f1, излучаемые передатчиком наземного пункта, принимаются на борту и после частотного преобразования излучаются бортовым передатчиком, работающем на частоте f2. Такое преобразование частоты необходимо для частотного разделения прямого канала и канала ретрансляции. Измерение фазовых сдвигов проводится на наземном пункте) осуществляется на одной и той же частоте. Для этого частота ретрансляции f2 выбирается такой, чтобы в месте сравнения (на наземном пункте) колебания частот f1 и f2 можно было бы легко путем преобразования привести к одной и той же частоте. Такое преобразование удобно выполнить, если частоты f1 и f2 удовлетворяют условиям
где
m и n - целые числа.
Ретранслированные сигналы на частоте f2 принимаются наземным приемником, преобразуются к частоте f1 и вместе с колебаниями передатчика подаются на измеритель разности фаз (измеритель интервалов времени), который регистрирует фазовый сдвиг между двумя этими колебаниями. После устранения фазовой неоднозначности (используя значение примерного, заданного априорно, расстояния от НКА до наземного пункта) на наземном пункте выполняются измерения в соответствии с выражением
ΔU(tн)=U(tн+τин)-U(tн), (22)
где
Utн - измеренные значения разности фаз для времени tн;
U(tн+τин ) - измеренные значения разности фаз для величины tн+τин;
τин - период следования импульсов сигналов времени неподвижного объекта.
По результатам сравнения последовательных измерений значений ΔU(t) определяется минимальное значение ΔU(tн) и соответствующий ему момент времени t0 прохождения НКА через точку траверза.
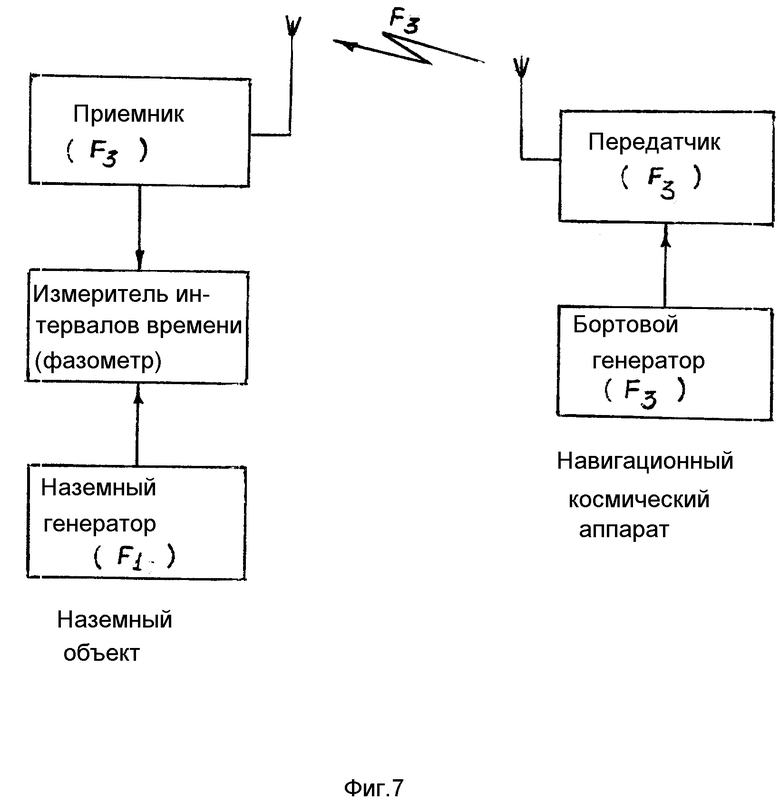
Момент времени tmin находится в беззапросном канале РТС. В этом случае на наземном пункте и на борту НКА устанавливается аппаратура так, как это показано на фиг. 7. Колебания частоты f3, излучаемые передатчиком НКА, наземного генератора подаются на измеритель интервалов времени (измеритель разности фаз). В соответствии с (22) производятся измерения разности фаз ΔUн-б(t) сигналов принятого с борта НКА и сформированного наземным генератором. По результатам сравнения последовательных измерений значений ΔUн-б(t) определяется минимальное значение ΔUн-б(t) и соответствующий ему момент времени нахождения минимальной разности бортовой и наземной шкал времени.
Следует отметить, что момент времени t0 и tмин в запросном и беззапросном каналах РТС определяются одновременно, в связи с этим частоты в этих каналах должны быть разнесены (f1≠f2≠f3).
Проведенный анализ показывает практическую возможность определения моментов времени t0 и tмин с помощью технических средств современных РТС.
Оценим точность оперативного определения относительной разности частот бортового и наземного генераторов разработанным способом.
Поскольку значение относительной разности частот боритового и наземного генераторов определяется на основании полученной зависимости (21), связывающей ее с другими величинами, подвергаемыми прямым измерениям, то процесс определения этого значения относится к косвенным измерениям [9].
В общем случае можно считать, что требуется оценить истинное значение величины Q, которая связана с величинами Qj (j = 1, 2,...m), измеряемыми прямыми способами, некоторым нелинейным уравнением
Q = F(Q1, Q2,...Qm). (23)
В [9] показано, что в качестве наиболее достоверного значения  косвенно измеряемой величины Q следует понимать значение, получаемое подстановкой в (23) косвенного измерения средних арифметических Xj рядов измерений исходных величин
косвенно измеряемой величины Q следует понимать значение, получаемое подстановкой в (23) косвенного измерения средних арифметических Xj рядов измерений исходных величин (24)
(24)
Так как исходные величины в выражениях (21) измеряют с помощью различных средств измерения в разное время, то можно с большой степенью достоверности считать результаты измерений некоррелированными, поэтому дисперсия оценки (24) определяется из выражения (25)
(25)
где - дисперсия измерения средних арифметических
- дисперсия измерения средних арифметических  рядов измерений исходных величин.
рядов измерений исходных величин.
В соответствии с выражениями (24) и (25), средняя квадратичная погрешность определения разности частот бортового и наземного генераторов может быть оценена с помощью равенства (26)
(26)
где
γ = (tмин-t0); - средняя квадратичная погрешность измерения высоты орбиты КА;
- средняя квадратичная погрешность измерения высоты орбиты КА; - средняя квадратическая погрешность измерения орбитальной скорости движения КА;
- средняя квадратическая погрешность измерения орбитальной скорости движения КА;
Sγ - средняя квадратическая погрешность измерения разности моментов времени tмин и t0 (tмин-t0).
Переменными в (26) являются:
1) относительная разность частот бортового и наземного генераторов;
2) средняя квадратическая погрешность измерения высоты орбиты КА;
3) средняя квадратическая погрешность измерения орбитальной скорости движения КА;
4) средняя квадратическая погрешность измерения разности моментов времени прохождения движущегося объекта непосредственно на радиоприемником неподвижного объекта (точкой траверза) (t0) и момента времени нахождения минимальной разности бортовой и наземной шкал времени (tмин).
Расчеты, выполненные в соответствии с (26) показали, что средняя квадратическая погрешность определения относительной разности частот бортового и наземного генераторов на ограниченном интервале (в зоне радиовидимости КА) с помощью разработанного способа, при относительной погрешности по частоте бортового генератора 2•10-11, средней квадратической погрешности измерения высоты орбиты КА 1 м и средней квадратической погрешности измерения скорости КА 0,001 м/с составляет величину 1-2•10-13, что примерно в 2-3 раза меньше погрешности оперативного определения разности частот бортового и наземного генераторов известным способом.
Таким образом, разработан новый способ оперативной синхронизации мер времени и частоты, размещенных на подвижных объектах, основанный на выявленной функциональной зависимости разности частот бортового (подвижного) и наземного (неподвижного) генераторов от разности моментов времени достижения минимального расхождения бортовой и наземной шкал времени и прохождения НКА над точкой траверза и параметров движения космического аппарата (движущегося объекта), позволяет повысить в 2-3 раза точность частотно-временной синхронизации генераторов, расположенных на подвижных объектах на ограниченных интервалах времени.
Источники информации
1. Шебшаевич В.С., Дмитриев П.П., Иванцевич Н.В. и др. Сетевые спутниковые радионавигационные системы / Под ред. П.П. Дмитриева и В.С. Шебшаевича. - М.: Радио и связь, 1982.
2. Тищенко В.А., Рассадин А.А. Центральный синхронизатор системы ГЛОНАСС//Радионавигация и время/РИРВ. - СПб. - 1994, - N 1. - с. 15-16.
3. Фатеев В.Ф. Введение в релятивистскую теорию радионавигации и синхронизации. Л.: ВИКИ им. А.Ф. Можайского, 1988.
4. Дейл С.А., Дейли П. Результаты наблюдения советских спутников глобальной орбитальной навигационной системы / Пер. с англ. IEEE PLANS, Las-Vegas.
5. Тихонравов М.К. Элементы теории полета и элементы проектирования искусственных спутников Земли. М.: Машиностроение, 1974.
6. Тоннелла М.-А. Основы электромагнетизма и теории относительности. - М.: Иностр. лит., 1962.
7. Корн Г. , Корн Т. Справочник по математике для научных работников и инженеров. - М.: Наука, Гл. ред. физ.-мат. литер., 1984.
8. Космические радиотехнические комплексы /Под ред. С.И. Бычкова. М.: Сов. радио, 1967.
9. Бурдун Г.Д., Марков Б.Н. Основы метрологии. - М.: Изд-во стандартов, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| УГЛОМЕСТНО-ВРЕМЕННАЯ ДОППЛЕРОВСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2007 |
|
RU2328416C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2302645C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2313477C1 |
| УГЛОМЕСТНО-ВРЕМЕННАЯ ДОПЛЕРОВСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2008 |
|
RU2368550C1 |
| СПОСОБ НАВИГАЦИОННЫХ ОПРЕДЕЛЕНИЙ ПО ИНТЕГРАЛЬНЫМ ПАРАМЕТРАМ | 1997 |
|
RU2125732C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2305057C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2329921C2 |
| СПОСОБ КООРДИНАТНО-ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПОДВОДНЫХ МОБИЛЬНЫХ ОБЪЕКТОВ | 2007 |
|
RU2390098C2 |
| СПОСОБ ПОСТРОЕНИЯ ФУНКЦИОНАЛЬНОГО ДОПОЛНЕНИЯ ОРБИТАЛЬНОГО БАЗИРОВАНИЯ К ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЕ | 2008 |
|
RU2367910C1 |
| СПОСОБ ТРАЕКТОРНОГО КОНТРОЛЯ МНОГОПУНКТНЫМ ИЗМЕРИТЕЛЬНЫМ КОМПЛЕКСОМ МНОГОИМПУЛЬСНЫХ ОРБИТ ВЫВЕДЕНИЯ КОСМИЧЕСКИХ АППАРАТОВ НА ВЫСОКОЭЛЛИПТИЧЕСКИЕ, ГЕОПЕРЕХОДНЫЕ И ГЕОСТАЦИОНАРНЫЕ ОРБИТЫ С ИСПОЛЬЗОВАНИЕМ РАЗГОННЫХ БЛОКОВ | 2024 |
|
RU2834499C1 |
Изобретение относится к измерительной технике и может быть использовано для определения частотно-временных параметров высокостабильных генераторов (мер времени и частоты), размещенных на подвижных объектах, например самолетах или навигационных космических аппаратах (НКА) системы "ГЛОНАСС". Относительную разность частот бортового (подвижного) и наземного (неподвижного) генераторов определяют в одной зоне радиовидимости подвижного объекта в зависимости от разности моментов времени достижения минимального расхождения шкал времени бортового и наземного генераторов и прохождения подвижного объекта через точку траверза. Момент времени достижения минимального расхождения шкал времени бортового и наземного генераторов определяют в беззапросном канале радиотехнической системы наземного объекта, а момент времени прохождения подвижного объекта через точку траверза - в запросном канале. Предлагаемый способ позволяет повысить точность частотно-временной синхронизации мер времени и частоты, размещенных на подвижных объектах, на коротких интервалах времени. 7 ил., 1 табл.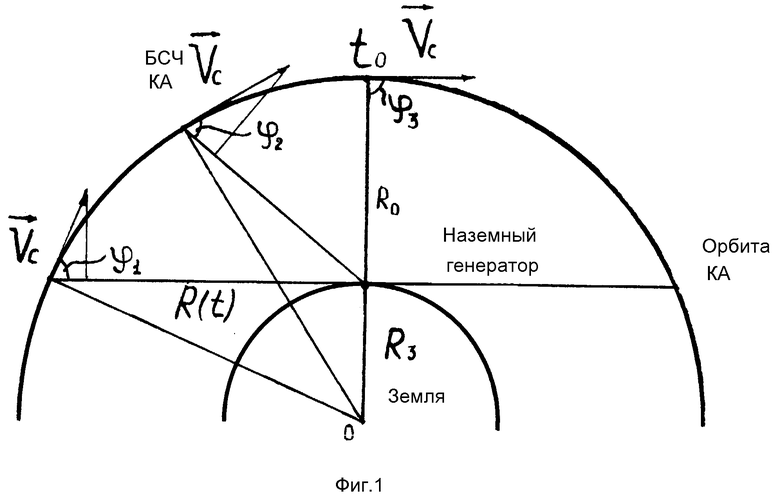
Способ оперативной синхронизации мер времени и частоты, размещенных на подвижных объектах, основанный на определении запросной и беззапросной дальности до подвижного объекта, отличающийся тем, что в беззапросном канале радиотехнической системы наземного объекта определяют момент времени достижения минимального расхождения бортовой и наземной шкал времени, в запросном канале радиотехнической системы наземного объекта определяют момент времени прохождения подвижного объекта через точку траверза, а относительную разность частот бортового (подвижного) и наземного (неподвижного) генераторов определяют по формуле
где Δfн-б разность частот бортового (подвижного) и наземного (неподвижного) генераторов;
fн - частота наземного генератора;
vс - скорость подвижного объекта;
с - скорость света;
Rо - высота орбиты подвижного объекта;
tm i n - момент времени достижения минимального расхождения бортовой и наземной шкал времени;
tо - момент времени прохождения подвижного объекта через точку траверза.
| Шебшаевич В.С., Дмитриев П.П., Иванцевич Н.В | |||
| и др | |||
| Сетевые спутниковые радионавигационные системы/Под ред | |||
| П.П.Дмитриева и В.С.Шебшаевича.-М.: Радио и связь, 1982, с.111-116 | |||
| Тищенко В.А., Рассадин А.А | |||
| Центральный синхронизатор системы ГЛОНАСС/Радионавигация и время РИРВ | |||
| - СПб., 1994, N1, с.15 и 16. |
