Изобретение относится к гидроавтоматике и предназначено для управления гидравлическими исполнительными устройствами технологического оборудования.
Известен электромеханический преобразователь по А.с.SU №1118810, F15B 3/00, содержащий корпус, две пары биморфных керамических элементов, два конусных штифта с пружинным элементом, удерживающих механический узел, состоящий из тонкостенной трубки и поворотной заслонки, и два сопла.
Известен электрогидравлический усилитель по А.с. SU №928089, F15B 3/00, который содержит электромеханический преобразователь, выполненный в виде основания, двух пакетов из пьезокерамических пластин разной толщины, поворотную заслонку с рычагами и пружиной, источник рабочей жидкости, два сопла с дроссельными элементами и две части блока управления.
В качестве прототипа выбран магнитострикционный электрогидравлический усилитель по Патенту RU №2170370, F15B 3/00, содержащий источник рабочей жидкости, дифференциальные сопла, два дросселя постоянного сечения, две линии подвода рабочей жидкости, поворотную заслонку с ребрами жесткости, дифференциальные прямолинейные магнитострикционные исполнительные элементы с распределенными обмотками и две части блока управления.
Относительно сложные однозвенные кинематические цепи преобразования информационных сигналов с использованием керамических элементов привода и наличие люфтовых соединений в устройствах-аналогах снижают надежность преобразования, не позволяют иметь широкий диапазон регулирования исполнительным механизмом. Применение в устройстве-прототипе прямолинейных стержневых дифференциальных приводов из металлических магнитострикционных материалов также имеет ограничение в диапазоне преобразования, ведет к снижению надежности вследствие недостаточной жесткости конструкции привода и ограничению области технического использования.
Техническим результатом, достигаемым при реализации заявляемого устройства, является повышение точности и быстродействия преобразования.
Для достижения технического результата в рычажной магнитострикционный электрогидравлический усилитель прямого управления, содержащий источник рабочей жидкости с двумя линиями подвода, подключенными к дифференциальным дросселям, магнитострикционный привод из однотипного магнитострикционного материала с двумя паритетными плечами, на каждом из которых по всей их длине размещены обмотки, подключенные к противофазным выводам блока управления, и поводок, жестко закрепленный в средней части планки привода, дополнительно введен золотниковый механизм, дифференциально подключенный к первой и второй линиям подвода рабочей жидкости через дроссели и имеющий подвижное кинематическое соединение с поводком, при этом первое и второе плечи магнитострикционного привода выполнены П-образными, образуя дополнительно по два паритетных плеча, на которых по всей длине размещены еще две однотипные с первыми обмотки, причем первая, третья и вторая, четвертая обмотки попарно и согласовано объединены и подключены к первым и вторым противофазным выводам блока управления соответственно.
Устройство поясняется чертежом, где показана блок-схема рычажного магнитострикционного электрогидравлического усилителя прямого управления.
Рычажной магнитострикционный электрогидравлический усилитель прямого управления) содержит источник 1 рабочей жидкости (ИРЖ), две линии 2, 3 подвода рабочей жидкости, два дросселя 4, 5 постоянного сечения, П-образный магнитострикционный привод 6 из однотипного материала, имеющий четыре плеча 7, 8 и 9, 10 с однотипными обмотками 11-14, планкой 15 и поводком 16, золотниковый механизм 17 и блок 18 управления (БУ).
Источник 1 рабочей жидкости ИРЖ через первую и вторую линии 2, 3 подвода рабочей жидкости с дросселями 4, 5 подключен к дифференциальным выводам золотникового механизма 17. Его механический вывод имеет подвижное кинематическое соединение со свободным концом поводка 16, жестко закрепленного в средней части планки 15 магнитострикционного привода 6. Планка 15 закреплена к свободным концам дифференциальных П-образных плеч 7, 8 и 9, 10, на которых по всей их длине размещены однотипные обмотки 11-14. Причем обмотки 11, 14 и 12, 13 включены попарно и согласовано и подсоединены к первым и вторым противофазным выводам БУ 18 соответственно.
Устройство работает следующим образом.
В исходном состоянии П-образный магнитострикционный привод 6 электрогидравлического усилителя (см.чертеж) обесточен и его поводок 16 занимает нейтральное положение, при котором золотниковый механизм 17 уравновешен. Давление по линиям А и В исполнительного устройства (гидродвигателя) одинаковое с давлением линии Р напора.
Перевод усилителя в рабочее состояние производится путем подачи с выводов БУ 18 токовых сигналов I0=I11,13=I12,14 смещения регулировочной характеристики на середину диапазона преобразования в попарно включенные обмотки 11, 14 и 12, 13 П-образных дифференциальных плеч 7, 8 и 9, 10 магнитострикционного привода 6. В их среде формируются управляющие магнитные поля, вызывающие однозначное полярное приращение длин ΔL=λS·L7-10 плеч 7-10 привода 6 относительно их исходных линейных размеров L7-10, выполненных из однотипного ферромагнитного материала с коэффициентом магнитострикции насыщения λS. Равновесные положения поводка 16 и золотникового механизма при этом не нарушаются.
В следующие моменты для полярного перемещения золотникового механизма 17 через поводок 16 магнитострикционного привода 6 в его обмотки 11, 14 и 12, 13 с противофазных выводов БУ 18 подаются токовые сигналы управления Ix=I0 соответствующего знака (полярности): I11,14=I0±Ix и I12,13=I0±Iх. Происходит пропорциональное удлинение каждого из плеч 7, 9 и 8, 10 привода 6 L7,9=Lo±ΔL и L8,10=Lo±ΔL, вызывая удвоенное изменение длины его П-образных дифференциальных плеч: L7,8=L7-L8=(Lo+ΔL)-(Lo-ΔL)=2·ΔL и L9,10=L9-L10=(Lo+ΔL)-(Lo-ΔL)=2·ΔL, где ΔL - длина плеч 7-10 в режиме смещения регулировочной характеристики.
В результате изменения пространственного положения планки 15 осуществляется полярное перемещение поводка 16 и золотникового механизма 17 на величину  , здесь lпов, lплан - линейные размеры поводка 16 и планки 15 привода 6. Это вызывает перераспределение давления напора линии Р в линиях А и В, которыми управляется силовое исполнительное устройство в заданном диапазоне значений, т.е. реализуется прямое управление исполнительным устройством.
, здесь lпов, lплан - линейные размеры поводка 16 и планки 15 привода 6. Это вызывает перераспределение давления напора линии Р в линиях А и В, которыми управляется силовое исполнительное устройство в заданном диапазоне значений, т.е. реализуется прямое управление исполнительным устройством.
Упрощение цепи регулирования способствует повышению точности, быстродействию преобразования и надежности устройства относительно выбранного прототипа, где применяется промежуточная ступень преобразования типа "сопло-заслонка". Этому также способствует выполнение магнитострикционного привода 6 с поворотным профилированным поводком 16 по жесткой безлюфтовой схеме. В целом указанные отличительные признаки заявляемого устройства расширяют область его технического использования и обеспечивают достижение положительного эффекта.
Практическая реализация устройства: магнитострикционный привод 6 - пакет пластин из ферросплава 49КФ2; блок управления 18 реализован в виде последовательно включенных формирователя импульсов, интеграторов прямого и инверсного сигналов с усилителями мощности.
Источники информации
1. А.с. SU №1118810, F15В 3/00. БИ №38, 1984.
2. A.c. SU №928089, F15B 3/00. БИ №18, 1982.
3. Патент RU №2170370, F15B 3/00. Приор. 1999.11.09, опубл. 2001.07.10, прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПЛЕЧЕВОЙ МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ ПРЯМОГО УПРАВЛЕНИЯ | 2007 |
|
RU2335663C1 |
| МНОГОПЛЕЧЕВОЙ МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2007 |
|
RU2335662C1 |
| РЫЧАЖНЫЙ МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2007 |
|
RU2338934C1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2007 |
|
RU2339852C1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2007 |
|
RU2339851C1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ С ПРОПОРЦИОНАЛЬНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2324844C2 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2005 |
|
RU2300672C2 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2005 |
|
RU2293888C1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2000 |
|
RU2171921C1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 1999 |
|
RU2170370C1 |
Усилитель предназначен для управления гидравлическими исполнительными устройствами технологического оборудования. Усилитель содержит источник рабочей жидкости, две линии подвода рабочей жидкости, два дросселя, магнитострикционный привод с П-образными плечами, равнозначными обмотками, планкой и поводком, золотниковый механизм и блок управления. Формируя противофазные токовые сигналы и подавая их в соответствующие обмотки, полярно перемещают поводок рычажного магнитострикционного привода и изменяют рабочее давление в камерах золотникового механизма, осуществляя, тем самым, прямое регулирование по заданному закону в требуемом диапазоне перемещений. Технический результат: повышение точности и быстродействия преобразования. 1 ил.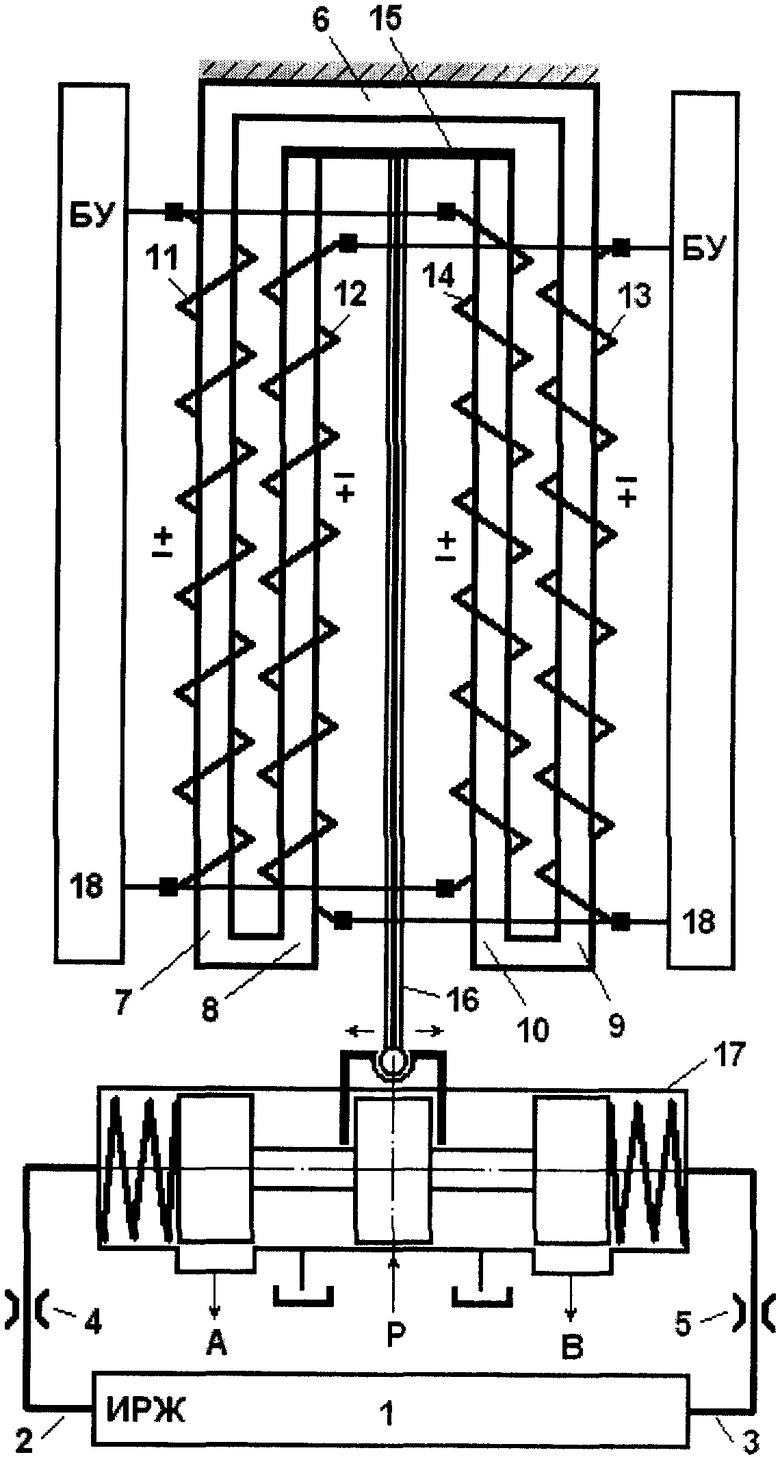
Рычажной магнитострикционный электрогидравлический усилитель прямого управления, содержащий источник рабочей жидкости с двумя линиями подвода, подключенными к дифференциальным дросселям, магнитострикционный привод из однотипного магнитострикционного материала с двумя паритетными плечами, на каждом из которых по всей их длине размещены обмотки, подключенные к противофазным выводам блока управления, и поводок, жестко закрепленный в средней части планки привода, отличающийся тем, что в него введен золотниковый механизм, дифференциально подключенный к первой и второй линиям подвода рабочей жидкости через дроссели и имеющий подвижное кинематическое соединение с поводком, при этом первое и второе плечи магнитострикционного привода выполнены П-образными, образуя дополнительно по два паритетных плеча, на которых по всей длине размещены еще две однотипные с первыми обмотки, причем первая, третья и вторая, четвертая обмотки попарно и согласованно объединены и подключены к первым и вторым противофазным выводам блока управления соответственно.
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 1999 |
|
RU2170370C1 |
| Электрогидравлический усилитель | 1980 |
|
SU928089A1 |
| Электромеханический преобразователь гидроусилителя | 1983 |
|
SU1118810A1 |
| DE 19538596 A1, 04.09.1996 | |||
| DE 19717807 A1, 29.10.1998. | |||

