Настоящее изобретение относится к устройству емкостного типа, которое чувствительно к смещению.
В настоящее время известно много устройств, в которых для измерения смещения используют изменение емкостного сопротивления конструкции при смещении в элементах этой конструкции. Одно такое устройство описано в патенте США №5006952. В этом патенте описан джойстик, который имеет разнесенные плоские емкостные пластинки, и электрическую схему для измерения изменения емкостного сопротивления этих пластин при наличии их относительного смещения. Такое пластинчатое устройство состоит из одного круглого диска, расположенного между двумя другими, причем все разделены воздушным зазором. Движение джойстика вызывает также движение среднего диска. Однако движение среднего диска ограничено шириной воздушного зазора. Наклоны среднего диска из стороны в сторону вокруг своей оси вызывают небольшое изменение детектируемого емкостного сопротивления, в то время как движение среднего диска в направлении своей оси вызывает относительно большое изменение емкостного сопротивления. Такое заметное различие в реакции на различные направления движения создает проблемы, поскольку джойстик будет реагировать с различными изменениями в емкостном сопротивлении, если джойстик толкать в разных направлениях.
Цилиндрические устройства емкостного типа, предназначенные для измерения смещения, были, например, описаны в европейском патенте №0831300, в патенте США №4961055 и в патенте США №3928796. В каждом из этих патентов, относящихся к предшествующему уровню техники, описаны устройства, предназначенные для работы таким образом, чтобы соответствующие цилиндрические детали двигались аксиально без изменения размера диэлектрика между этими деталями.
Настоящее изобретение, соответствующее первому аспекту, раскрывает чувствительное к смещению устройство, содержащее первую рабочую деталь и вторую рабочую деталь, установленную с возможностью смещения и имеющую, по меньшей мере, три степени свободы относительно первой рабочей детали, и содержащее датчик смещения емкостного типа, имеющий, по меньшей мере, два емкостных элемента, отстоящие друг от друга, причем один из этих емкостных элементов соединен с первой рабочей деталью, а второй из емкостных элементов соединен со второй рабочей деталью, так что оба элемента поддаются смещению относительно друг друга, имея указанные, по меньшей мере, три степени свободы и, таким образом, изменяя свое емкостное сопротивление, при этом согласно настоящему изобретению элементы выполнены в виде, по меньшей мере, двух по существу коаксиальных трубок, одна из которых расположена в другой трубке.
Трубки предпочтительно представляют собой два, в общем, концентрических цилиндра. В альтернативном варианте осуществления настоящего изобретения используют три трубки: центральную трубку и две дополнительные трубки, причем одна дополнительная трубка расположена внутри центральной трубки, а другая дополнительная трубка расположена снаружи центральной трубки.
Настоящее изобретение относится также к приспособлению, содержащему пружины, которое формирует систему, чувствительную к смещению измерительного устройства, например измерительного щупа.
Такое приспособление в щупе известно, например, из международной публикации №WO 00/60307, в которой описан измерительный щуп, имеющий иглодержатель, смонтированный для совершения поворота и осевого перемещения на паре плоских пружин, разделенных в аксиальном направлении и которые проходят между иглодержателем и корпусом щупа. Иглодержатель поворачивается вокруг точки на оси щупа, который позиционируется где-либо между плоскостями двух пружин в зависимости от относительной жесткости этих двух пружин. В этой публикации дополнительно предлагается, что может быть добавлена третья пружина, которая также проходит между иглодержателем и корпусом в плоскости через точку поворота иглодержателя.
Таким образом, в соответствии со вторым аспектом настоящее изобретение обеспечивает получение подвесной системы для чувствительного к перемещению устройства, в которой иглодержатель подвешен в корпусе посредством альтернативного приспособления, содержащего пружины.
В предпочтительном варианте осуществления, соответствующем настоящему изобретению, эти пружины являются плоскими пружинами.
Кроме этого, в предпочтительном варианте осуществления настоящего изобретения подвесная система содержит три плоские пружины.
Предпочтительно, чтобы щуп дополнительно содержал устройство перерегулирования, которое может быть кинематическим устройством перерегулирования, известным самим по себе и предназначенным для защиты пружинной подвески от механических перенапряжений пружин в процессе значительных перемещений иглы в ходе осуществления операции контроля с помощью щупа.
Механизм перегулирования предпочтительно расположен в пружинной подвесной системе.
В дальнейшем настоящее изобретение будет описано со ссылкой на чертежи, на которых:
фиг.1 изображает схематический чертеж варианта осуществления, соответствующего настоящему изобретению;
фиг.2 и фиг.3 - иллюстрации компонентов емкостного первичного измерительного преобразователя, иллюстрируемого на фиг.1;
фиг.4 - принципиальная электрическая схема части цепи формирования сигнала, предназначенной для использования с вариантом осуществления, соответствующим настоящему изобретению;
фиг.5 - принципиальная электрическая схема модифицированного емкостного первичного измерительного преобразователя и части цепи формирования сигнала;
фиг.6 - иллюстрация секции измерительного щупа и второго аспекта настоящего изобретения;
фиг.7 - иллюстрация пружинного компонента измерительного щупа, иллюстрируемого на Фиг.6;
фиг.8-12 - иллюстрации дополнительного варианта осуществления настоящего изобретения.
На фиг.1 иллюстрируется чувствительное к смещению устройство, соответствующее варианту осуществления настоящего изобретения. Это устройство представляет собой измерительный щуп 10, прикрепленный к установке 20, т.е. к координатно-измерительной установке или механическому станку. Игла 30 имеет головку 40, которая при использовании может входить в контактное взаимодействие с поверхностью, например, заготовки 50. Силы поверхностного контактного взаимодействия, прикладываемые к головке иглы, побуждают иглу 30 двигаться. Как следствие пружинного устройства этого варианта осуществления, описываемого ниже, игла имеет три степени свободы: две поворотные (x и y) и одну поступательную (z). Игла соединена с емкостным первичным измерительным преобразователем 60, который может быть использован для определения того, какое движение иглы имело место и/или и на какую величину. Таким образом, может генерироваться простой сигнал запуска или сигнал аналогового типа для содействия получению, например, профиля сканирования.
Пружинное устройство содержит две разнесенные в пространстве и параллельные диафрагмы 12, которые позволяют упругое поступательное движение иглы 30 в направлении z, и дополнительную немного более жесткую плоскую пружину 14, которая позволяет головке иглы двигаться по сферической поверхности, имеющей центральную точку в крестовине 11, которая лежит приблизительно в плоскости плоской пружины 14. Таким образом, иллюстрируемое пружинное устройство обеспечивает три степени свободы.
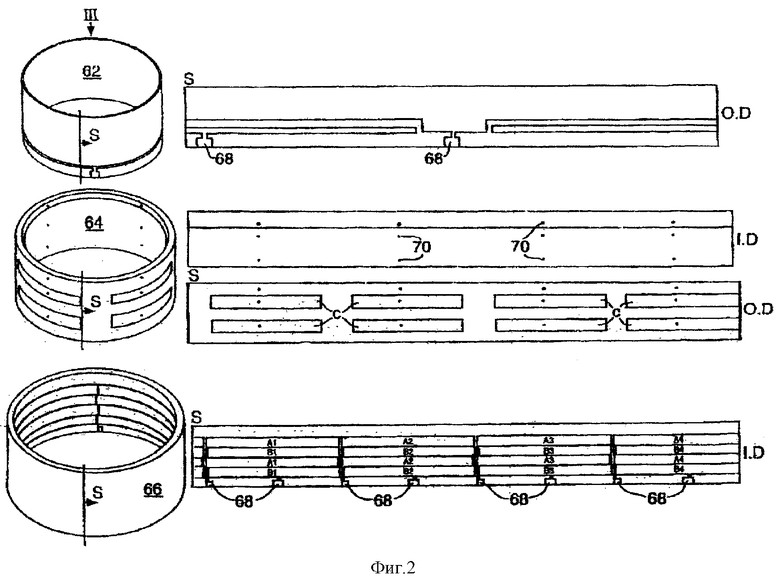
Как следует из фиг.1, 2 и 3, емкостный первичный измерительный преобразователь образован из трех концентрических керамических цилиндров 62, 64 и 66. Каждый из цилиндров 62, 64 и 66 образован из керамического материала, металлизированного медью, покрытой сверху золотом до общей толщины покрытия металлизации, составляющей приблизительно, два микрона. Это покрытие затем подвергают сквозному травлению для получения в покрытии дискретных емкостных областей, некоторые из которых при этом имеют электрические соединения 68. Движение иглы вызывает упругое движение среднего емкостного цилиндра 64. Два относительно закрепленных емкостных цилиндра 62 и 66, причем цилиндр 62 является внутренним цилиндром, а цилиндр 66 - внешним цилиндром, отстоят пространственно от внутренней и внешней поверхностей среднего цилиндра 64 на величину диэлектрического воздушного зазора. Изменение емкости будет иметь место при движении среднего цилиндра 64. Следует отметить, что движение цилиндра 64 будет иметь место в направлении z или при повороте вокруг центра 11 с результатом того, что воздушный зазор между цилиндрами не будет значительно изменяться. Однако проводящий слой на цилиндрах разделен на сегменты, так что перекрытие сегментов будет определять емкость в первичном измерительном преобразователе и в соответствии с этим движение цилиндра может быть измерено величиной перекрытия сегментов. В этом случае возможен больший диапазон перемещения между цилиндрами, чем возможен в случае, соответствующем предшествующему уровню техники, когда используют плоские пластины.
На фиг.2 иллюстрируются примеры рисунков проводящих областей на цилиндрах 62, 64 и 66. На фиг.2 представлено перспективное изображение цилиндров емкостного первичного измерительного преобразователя 60 с пространственным разделением деталей, иллюстрируемого на фиг.1.
На фиг.2 показаны также усовершенствованные поверхности цилиндров, ясно показывающие рисунок дискретных емкостных областей.
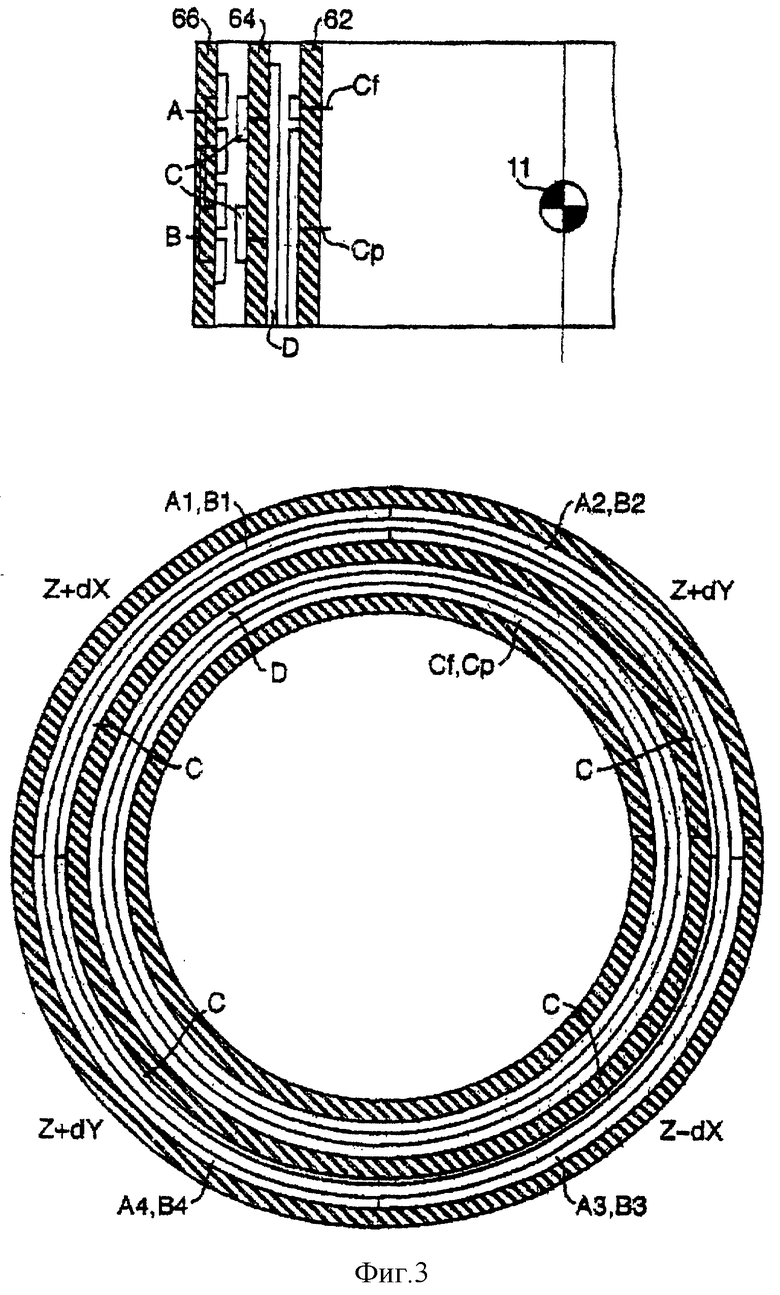
На фиг.3 представлен вид по стрелке 3, показанной на фиг.2, и показано детализированное сечение первичного измерительного преобразователя.
Металлизированные области А, В и С показаны намного более толстыми, чем это имеет место в практических случаях применения.
Неподвижный внешний цилиндр 66 имеет четыре кольца, каждое из которых разделено на четыре квадранта А1В1, А2В2, А3В3 и А4В4, каждый из которых соединен с электрической цепью формирования сигнала, которая будет описана ниже. Цепью формируется электрическое напряжение, обеспечивающее заряд емкости, который изменяется в соответствии со степенью перекрытия между областями А, В и С. Поддающийся перемещению средний цилиндр 64 не имеет электрических соединений, но его внешняя поверхность электрически соединена с его внутренней поверхностью через отверстия 70. Восемь дискретных областей С среднего цилиндра перекрывают часть квадрантов А и В, так что изменение величины перекрытия вызывает изменение электрической емкости. Как описано выше, изменение перекрытия имеет место в течение движения в направлении z, y или х. Квадранты используются так, чтобы сигнальная цепь могла определить то, в каком направлении движется средний цилиндр (и, следовательно, игла).
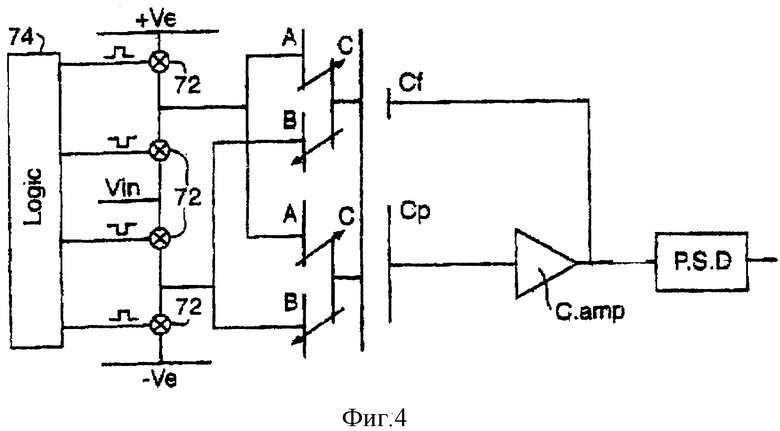
На фиг.4 показана электрическая цепь для емкостного первичного измерительного преобразователя 60, иллюстрируемого на фиг.1-3. В процессе работы первичный измерительный преобразователь заряжается ступенчатым электрическим напряжением посредством переключательных схем 72, управляемых логической схемой 74. Емкостные области, только один набор которых показан на чертеже, таким образом, попеременно заряжаются, и их заряд усиливается усилителем заряда с.amp, а фаза заряда определяется фазочувствительным прибором p.s.d.
Подробное описание одной возможной цепи, предназначенной для использования с настоящим изобретением, приведено в патенте США №5006952, описание которого включено в эту заявку в качестве ссылки.
В этом варианте осуществления показаны две дополнительные емкости Cf и Ср. Емкость Cf является емкостью обратной связи для усилителя заряда, а емкость Ср является отсекающей емкостью. Обе емкости образованы на внутреннем цилиндре 62. Таким образом, на движущемся цилиндре 64 не образованы электрические соединения. Емкости Cf и Ср имеют одинаковый диэлектрик (то есть воздух) так же, как другие емкости первичного измерительного преобразователя, и, следовательно, любые изменения в диэлектрической постоянной воздуха одинаково повлияют на все емкости и, таким образом, будут иметь небольшое результирующее влияние.
В этом варианте будут образованы четыре канала, по одному для каждого из квадрантов первичного измерительного преобразователя. В этом случае направление x или y движения иглы может быть определено из изменения электрической емкости в каждом квадранте. Электрическая цепь, пригодная для этого варианта осуществления, соответствующего настоящему изобретению, имеющая четыре канала, описана также в патенте США №5006952.
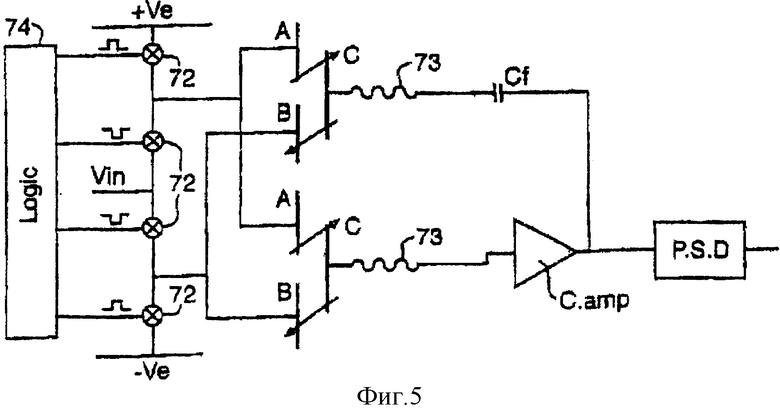
Другой вариант осуществления настоящего изобретения иллюстрируется на фиг.5. В этом варианте осуществления используют только два цилиндра. Принцип работы аналогичен принципу работы варианта, описанного выше, за исключением того, что на первичном измерительном преобразователе нет конденсаторов Cf и Ср. Вместо этого конденсатор Cf смонтирован вне первичного измерительного преобразователя в цепи формирования сигнала, а конденсатора Ср не требуется. Хотя этот первичный измерительный преобразователь проще по конструкции (имеются только два цилиндра), недостатком этой конструкции является то, что требуется гибкое электрическое соединение 73 для движения цилиндра (например, внутреннего).
Электрическая цепь, показанная на фиг.5, по существу не отличается от электрической цепи, показанной на фиг.4, или от электрической цепи, описанной в патенте США №5006952.
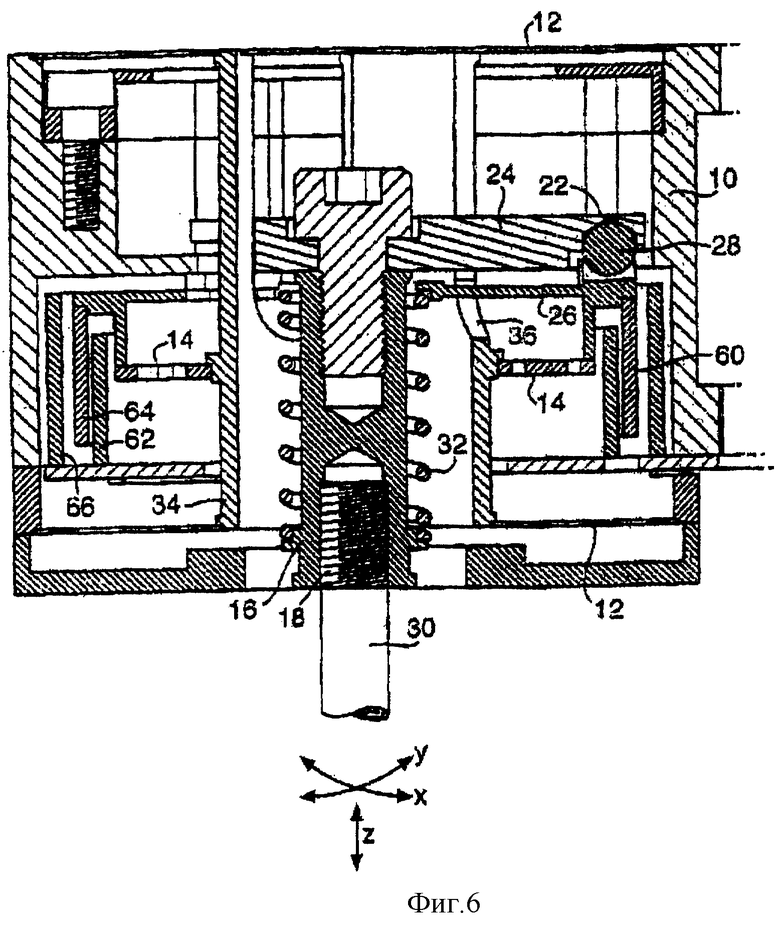
На фиг.6 показано сечение устройства, чувствительного к перемещению, в этом случае измерительного щупа. Этот щуп аналогичен щупу, иллюстрируемому на фиг.1, и имеет одинаковые ссылочные номера, указывающие аналогичные детали.
Щуп имеет корпус 10, из которого проходит игла 30, входящая в контактное взаимодействие с заготовкой. Винтовое резьбовое соединение 18 соединяет иглу 30 с иглодержателем 16. Иглодержатель 16 поддерживается посредством кинематической опоры, состоящей из трех V-образных канавок 22, расположенных под углом 120° по отношению друг к другу вокруг пластины 26. Каждая канавка 22 обеспечивает гнездо для шарика 28, прикрепленного к опоре 24, которая в свою очередь соединена с иглодержателем 16. Цилиндрическая винтовая пружина 32, которая работает на сжатие между опорой 24 и иглодержателем 16, обеспечивает усилие для прижатия шариков 28 в канавках 22 и, таким образом, крепко прижимает иглодержатель 16 к пластине 26.
Кинематическая опора обеспечивает механизм перерегулирования, который развертывается и позволяет шарику или шарикам подниматься из их соответствующих гнезд, если перемещение иглодержателя достигает недопустимой величины; предохраняя благодаря этому остальной подвесной механизм иглодержателя. Силы, действующие на иглу, побуждают пружину 32 сжиматься, и, таким образом, шарик или шарики 28 будут подниматься из своих гнезд, и цилиндр 64 не побуждается в контактное взаимодействие со своими смежными цилиндрами 62 и 66.
Пластина 26 движется (при нормальной работе) с иглой 30 и соединена непосредственно с первичным измерительным преобразователем 60 перемещения. В этом случае показан (и получен, как описано выше) емкостный первичный измерительный преобразователь 60, но в этом случае может быть использован любой первичный измерительный преобразователь.
Пластина упруго подвешена на детали 34 цилиндрической формы посредством плоской пружины 14. Эта пружина позволяет поворотное движение иглодержателя вокруг центральной точки относительно иглодержателя в направлениях x и y.
Деталь 34 цилиндрической формы имеет прорези 36 для обеспечения беспрепятственного прохода стоек опоры 24 и пластины 26. Деталь цилиндрической формы подвешена на каждом конце посредством двух дополнительных плоских пружин 12, которые позволяют детали цилиндрической формы и компонентам, которые она поддерживает, двигаться только в направлении z.
Первичный измерительный преобразователь перемещения имеет компоненты (цилиндры 62 и 66), прикрепленные к корпусу 10, и дополнительный компонент (цилиндр 64), подвешенный для движения в направлениях x и y посредством пружины 14 и в направлении z посредством параллельных пружин 12.
Такое устройство щупа позволяет получить компактную конструкцию.
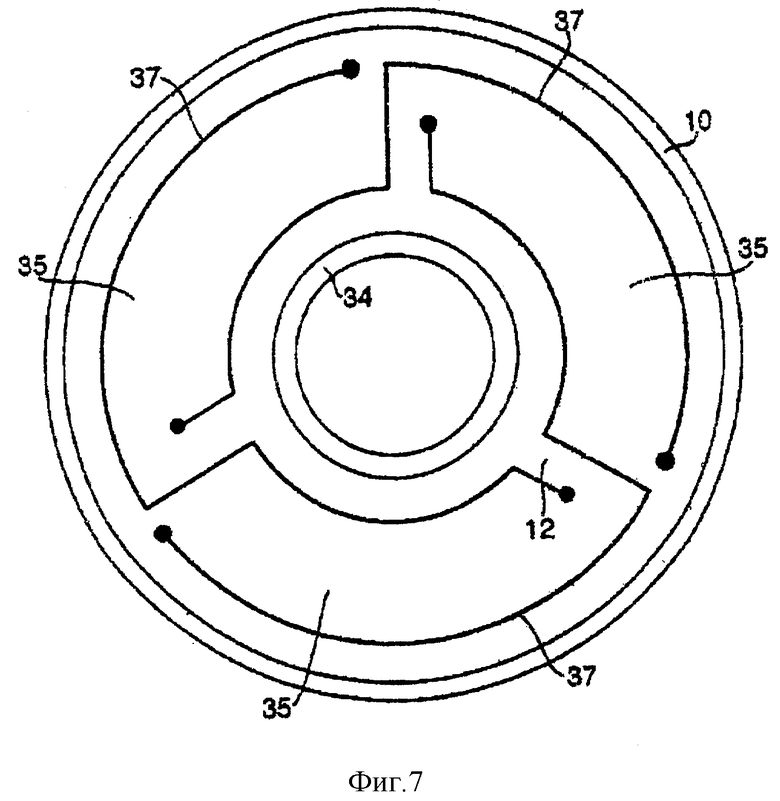
Конструкция пружин 12 показана на фиг.7. Внутренняя и внешняя периферия соответственно приварены к детали 34 цилиндрической формы и корпусу 10. Каждая пружина 12 имеет конструкцию "острова Мэн", имеющую три ветви 35, проходящие, в общем, в окружном направлении и в радиальном направлении наружу. Ветви 35 образованы путем сквозного протравливания трех дорожек 37 в материале пружины.
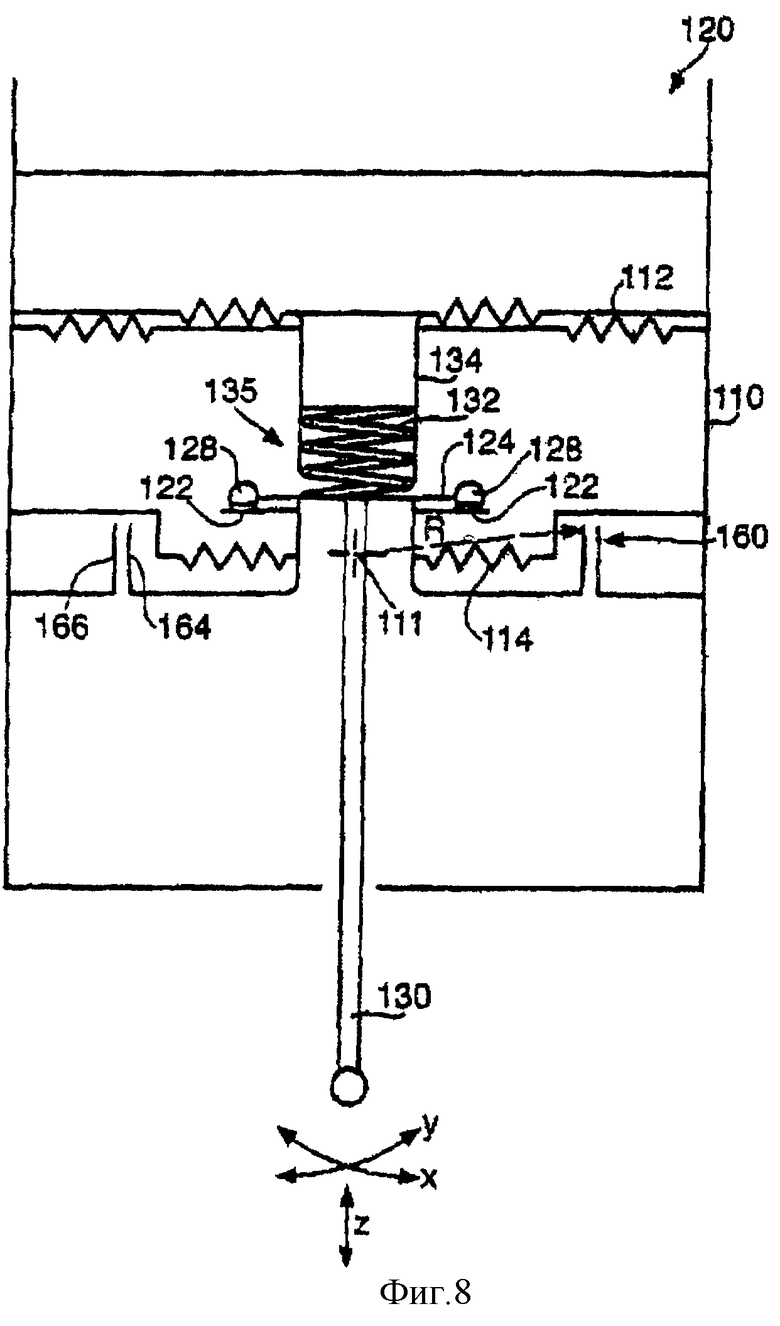
На фиг.8 показана упрощенная схема устройства, иллюстрируемого на фиг.9. Фиг.10, 11 и 12 являются увеличенными изображениями деталей варианта осуществления, иллюстрируемого на фиг.8 и 9.
На фиг.8 иллюстрируется другой измерительный щуп 110. Он имеет иглу 130, которая смонтирована на подпружиненной каретке 134. Движение этой каретки относительно станка 120, на котором она смонтирована, может быть определено при использовании емкостного первичного измерительного преобразователя 160. В этом случае первичный измерительный преобразователь 160 содержит две трубки 164 и 166, выполненные в виде двух концентрических цилиндров, которые подробно описаны ниже.
Этот вариант осуществления имеет другое пружинное устройство по сравнению с вариантом осуществления, иллюстрируемым на фиг.1 и 6. В этом варианте осуществления параллельную пару плоских пружин 112 используют для обеспечения относительно высокой степени жесткости для движения в направлениях x или y, но обеспечивают гибкость в направлении z. Эта пружинная пара 112 может быть заменена одной более толстой пружиной, однако поскольку сквозное травление лучше всего работает на тонком материале, то, как показано, дешевле делать две тонкие пружины, чем штамповку более толстой одной пружины.
Дополнительная плоская пружина 114 поддерживает нижний конец каретки 134. Эта дополнительная пружина обеспечивает противодействие движению каретки/иглы в направлениях x, y и z. Конфигурация пружины позволяет поворот иглы вокруг воображаемой точки 111, а также движение иглы в направлении z. Дифференциальное движение пластин 164 и 166 вызывает изменение электрической емкости между ними, которая может детектироваться, например, при использовании электрической цепи, показанной на фиг.5.
В этом варианте осуществления предусмотрен также механизм 135 перерегулирования в виде подпружиненной кинематической опоры. Пружина 132 одним концом давит на каретку 134, а своим другим концом прижимает пластину 124, поддерживающую три шарика 128 против комплиментарных V-образных канавок 122, поддерживаемых на каретке 134. Работа подпружиниваемой конструкции шарик /V-образная канавка подробно описана выше.
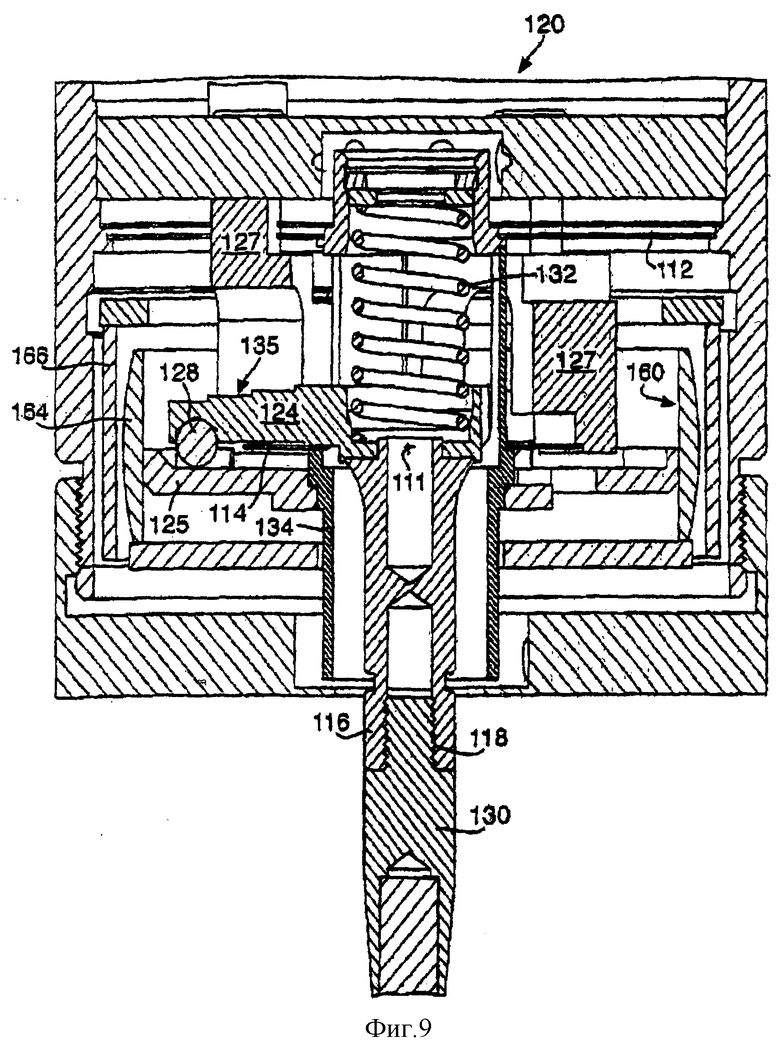
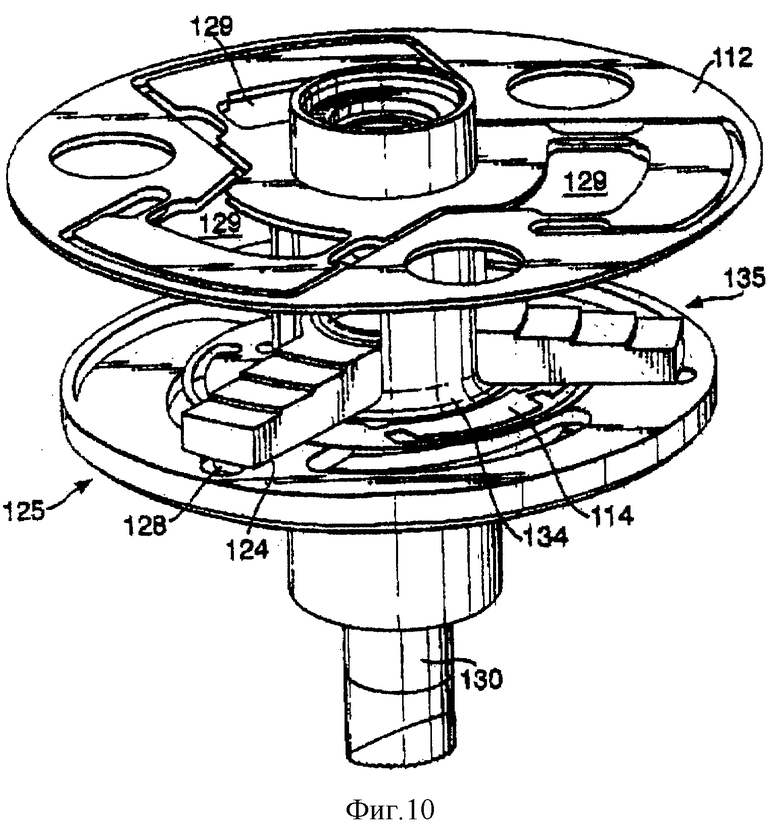
На фиг.9 показано сечение щупа, изготовленного в соответствии со схематическим изображением, иллюстрируемым на фиг.8, а на фиг.10 иллюстрируются увеличенные детали щупа, иллюстрируемого на фиг.9. Этот щуп работает аналогично щупу, иллюстрируемому на фиг.1-7 и описанному выше, и имеет те же три степени свободы. Пластина 124 проходит в направлении наружу между зазорами в каретке 134. Опора 127 для нижней пружины 114 проходит вниз между зазорами 129 в верхней пружине 112.
Емкостный первичный измерительный преобразователь 160 показан на фиг.9, но для ясности изображения не показан на фиг.10. Внутренний цилиндр 164 поддерживается на опоре 125, прикрепленной к каретке 134. Внешний цилиндр 166 соединен с корпусом щупа. Первичный измерительный преобразователь 160 работает так, как описано выше. На фиг.5 иллюстрируется пригодная электрическая схема для первичного измерительного преобразователя с двумя цилиндрами.
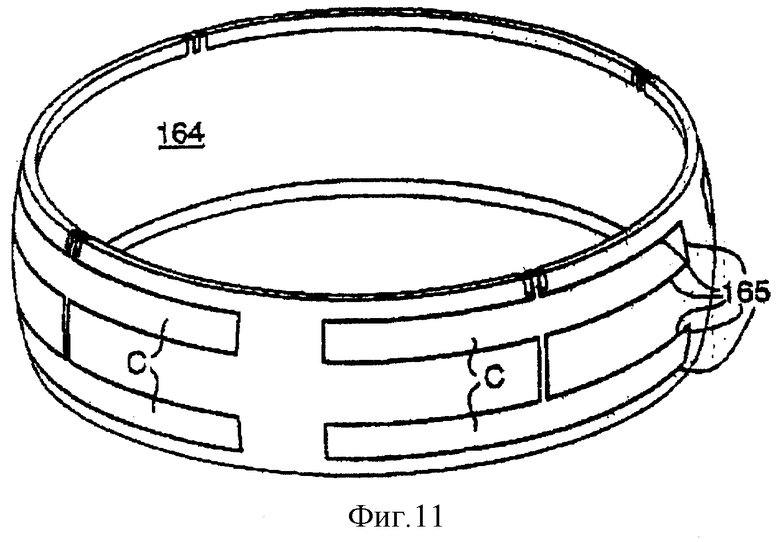
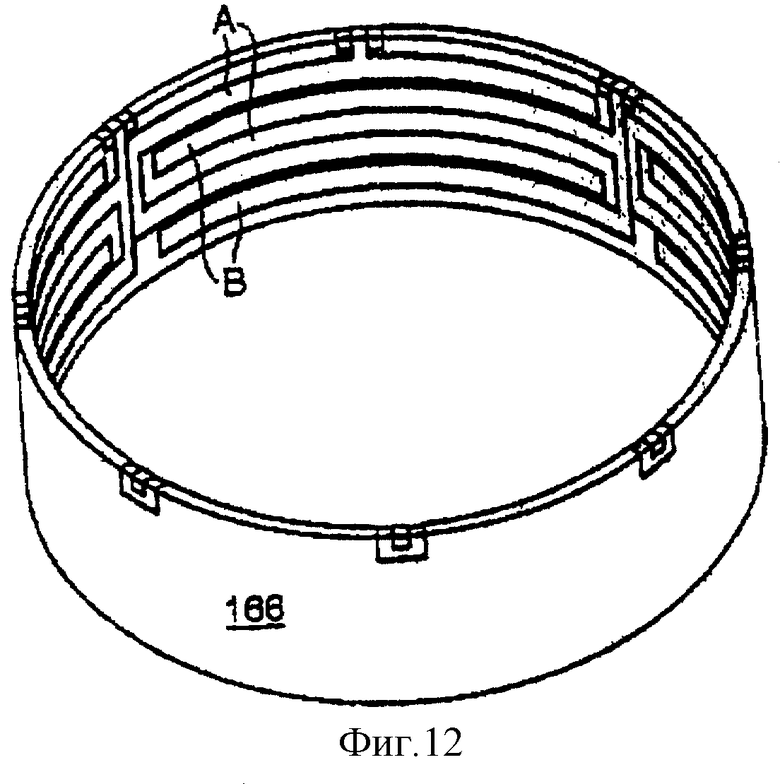
На фиг.11 и 12 иллюстрируются два цилиндра 164 и 166 в увеличенном виде. Рисунки проводящего материала А, В и С на цилиндрах аналогичны рисункам, полученным на цилиндрах 164 и 166, описанным выше. В этом случае отсутствует цилиндр, эквивалентный цилиндру 62, и, следовательно, требуются гибкие соединения (позиция 73 на фиг.5) с областью С на цилиндре 164.
Следует отметить, что внутренний цилиндр 164 имеет не плоскую, а бочкообразную внешнюю периферию с радиусом R (фиг.8), образованным приблизительно из центра вращения 111 первичного измерительного преобразователя 160. Бочкообразность позволяет делать диэлектрический зазор между двумя цилиндрами 164 и 166 меньше, и, следовательно, в этом случае может быть достигнута более высокая электрическая емкость. Уменьшаются также перекрестные взаимные влияния между осями x, y и z. Для получения криволинейных разрывов 165 в проводящем материале, нанесенном в виде покрытия на внутренний цилиндр 164, используют лазерную технологию травления. Эта технология может быть также использована для внешнего цилиндра 166. Квалифицированным специалистам в этой области техники станет очевидно, что возможно много модификаций и изменений описанных вариантов осуществления. Настоящее изобретение описано со ссылкой на измеряющий перемещение щуп с иглой, однако при использовании настоящего изобретения может быть получен любой первичный преобразователь с множеством осей измерения или точек касания. Хотя в показанных щупах использованы пружины для упругого движения и опора емкостного первичного измерительного преобразователя, однако могут быть использованы другие конструкции, например резиновые блоки, направляющие или механизмы параллельного действия. Однако в качестве описанных и проиллюстрированных цилиндров (62, 64 и 66) первичного измерительного преобразователя будут удовлетворительно работать элементы любой трубчатой формы, например квадратные трубки, гексагональные трубки или трубки любой неправильной формы. Вариант осуществления, иллюстрируемый на фиг.8-12, имеет цилиндр 164 первичного измерительного преобразователя, имеющий бочкообразную поверхность, однако подобные хорошие результаты даст цилиндр, который сужается к каждому из своих торцов. Проводящие элементы первичных измерительных преобразователей, проиллюстрированные в каждом варианте осуществления, показаны обращенными друг к другу. Первичные измерительные преобразователи будут работать хорошо, если проводящие элементы расположены на поверхностях, которые не обращены друг к другу. Такая конфигурация может потребоваться для уменьшения себестоимости. Во втором варианте осуществления поддающийся перемещению цилиндр 164 может быть на внешней стороне, при этом неподвижному цилиндру может быть придана бочкообразная форма.
На приведенных чертежах иллюстрируются первичные измерительные преобразователи 60 и 160, имеющие проводящие квадранты, тогда как два или более проводящих секторов, например три сектора, могут быть использованы с соответствующим изменением электрических цепей, иллюстрируемых на фиг.4 или 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ДАВЛЕНИЯ (ВАРИАНТЫ) | 1995 |
|
RU2143673C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАБОЧЕГО ДАВЛЕНИЯ С УЛУЧШЕННОЙ КОМПЕНСАЦИЕЙ ОШИБОК | 2000 |
|
RU2243518C2 |
| СИСТЕМА И СПОСОБ ИЗМЕРЕНИЯ ЗАЗОРА | 2006 |
|
RU2358238C2 |
| БЕЗОПАСНЫЙ УЗЕЛ ИГЛЫ И СПОСОБЫ ЕГО ИСПОЛЬЗОВАНИЯ | 2010 |
|
RU2533735C2 |
| НАКЛАДЫВАТЕЛЬ ИЗОГНУТОЙ ИГЛЫ | 2013 |
|
RU2677048C2 |
| ДАТЧИК ДИФФЕРЕНЦИАЛЬНОГО ДАВЛЕНИЯ С ИЗМЕРЕНИЕМ ДАВЛЕНИЯ В ЛИНИИ | 2011 |
|
RU2538363C2 |
| СИСТЕМА ДЛЯ ДОБЫЧИ НЕФТИ (ВАРИАНТЫ) И СПОСОБЫ ФОРМИРОВАНИЯ ДВИЖУЩЕГО УЗЛА ДЛЯ ПОГРУЖНОЙ НАСОСНОЙ СИСТЕМЫ, ПРЕДОХРАНЕНИЯ ПОГРУЖНОГО ЭЛЕКТРОДВИГАТЕЛЯ И ЗАЩИТЫ КОМПОНЕНТОВ ЭЛЕКТРИЧЕСКОЙ ПОГРУЖНОЙ НАСОСНОЙ СИСТЕМЫ ОТ НАКАПЛИВАЕМОГО ГАЗА | 2004 |
|
RU2300667C2 |
| СЪЕМНЫЙ МАГНИТОСТРИКЦИОННЫЙ ЗОНД С АВТОМАТИЧЕСКОЙ КАЛИБРОВКОЙ | 2015 |
|
RU2650714C1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С МЕХАНИЗМОМ ПЕРЕКЛЮЧЕНИЯ НАПРАВЛЕНИЯ С РАЗЛИЧНОЙ СКОРОСТЬЮ | 2012 |
|
RU2628048C2 |
| МЕДИЦИНСКИЙ ИНСТРУМЕНТ И ОДНОРАЗОВЫЙ ШПРИЦ (ВАРИАНТЫ) | 1994 |
|
RU2136321C1 |
Изобретение относится к устройству емкостного типа, которое чувствительно к смещению. Чувствительное к смещению устройство, содержащее: корпус (10; 110); иглодержатель (16; 116) для удерживании иглы, вступающей в контакт с заготовкой; подвесную систему для упругой установки иглодержателя на корпус (12; 112; 114) и позволяющую одну поступательную степень свободы иглодержателя относительно корпуса и две поворотные степени свободы иглодержателя относительно корпуса, и датчик (60; 160) для определения смещения между корпусом и иглодержателем. Датчик имеет первый емкостной элемент (62, 66; 166), установленный на корпусе, и второй емкостной элемент (64; 164), установленный на иглодержателе, с возможностью совместной работы с первым емкостным элементом и с возможностью перемещения относительно первого емкостного элемента. Подвесная система имеет упругий элемент или элементы, чтобы позволить указанную поступательную степень свободы, и дополнительный упругий элемент или элементы, чтобы позволить указанные поворотные степени свободы. Причем датчик (60, 160) для определения смещения между корпусом и иглодержателем, имеющий первый чувствительный элемент (62, 66; 166), соединенный с корпусом, и второй чувствительный элемент (64; 164), соединенный с иглодержателем, причем первый и второй чувствительные элементы могут работать совместно, относительно перемещаться и находиться в виде по меньшей мере двух по существу коаксиальных трубок. 2 н. и 9 з.п. ф-лы, 12 ил.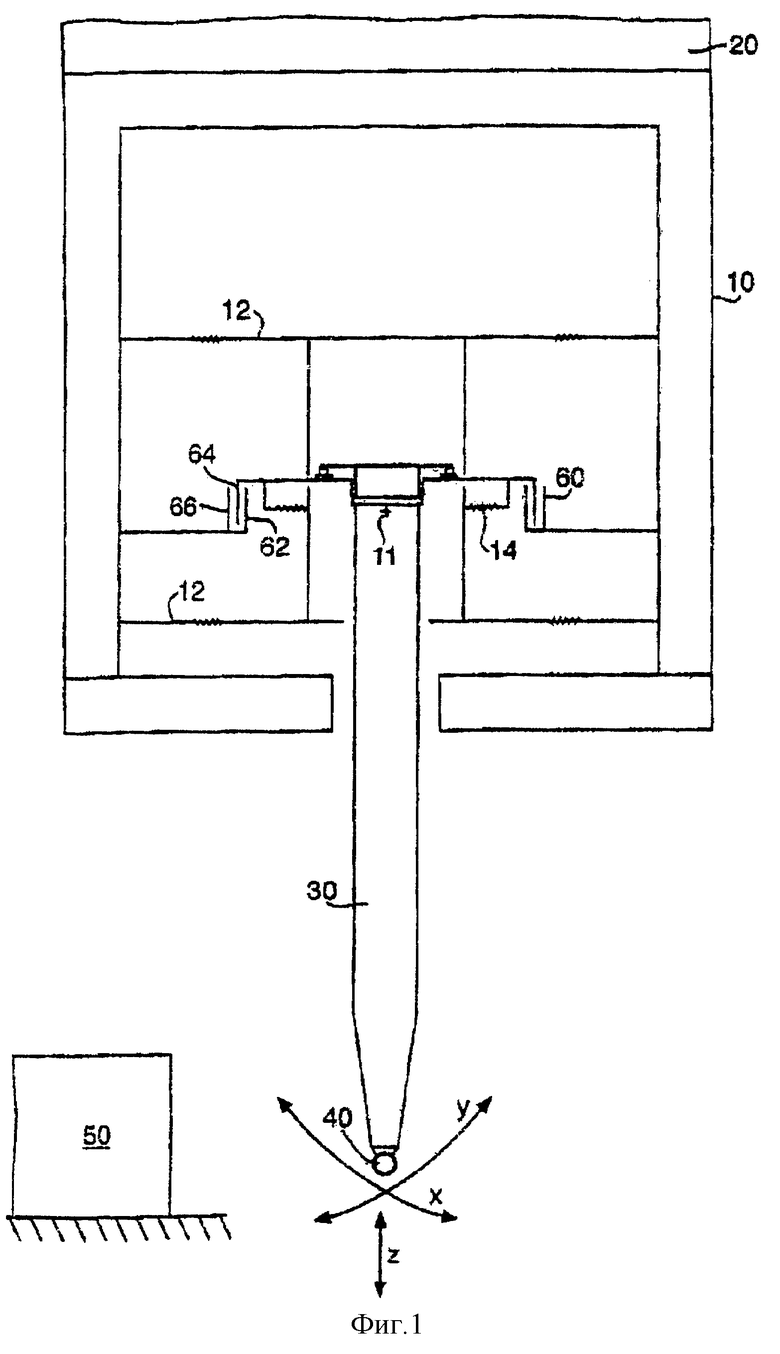
| US 4303919 А, 01.12.1981 | |||
| ПРИБОР ДЛЯ РЕШЕНИЯ ЗАДАЧИ ВЫБОРА ОПТИМАЛЬНОГО РЕЖИМА ОБРАБОТКИ ИЗДЕЛИЙ | 1937 |
|
SU60307A1 |
| US 2892152 А, 23.06.1959 | |||
| US 4562430 А, 31.12.1985 | |||
| Нулевая измерительная головка | 1986 |
|
SU1357697A1 |

