Область техники, к которой относится изобретение
Большинство имеющихся систем указанного назначения являются пассивными, в то время как настоящее изобретение относится к способу и активной системе обнаружения лесного пожара с использованием лазерного локатора или лидара. В нескольких, очень немногих изобретениях раскрыты активные системы обнаружения лесного пожара. Однако в таких системах используется конфигурация лидара с одной осью, что делает их неэффективными, так как направляемый луч и обратное излучение проходят по одному и тому же пути. Направляемое и принимаемое излучение должны разделяться с помощью поляризатора, что снижает оптическую эффективность. Кроме того, такая система более сложна, процесс сканирования замедлен, а обработка сигнала низкоэффективная. Предлагаемая система более проста, и в ней не используется поляризованное излучение, так что ее эффективность намного выше, в основном благодаря отсутствию перекрытия траекторий направляемого и обратного излучения. Один компьютеризованный блок с использованием нейронных сетей обрабатывает обратное излучение, рассеянное от частиц, которые пересекают путь лазерного луча, и идентифицирует сигнал облака дыма от пожара. Для расширения территории наблюдения можно объединить и синхронизировать две или более лидарных станции. Если станции работают в сети, можно производить оценку и подтверждение событий путем триангуляции, что повышает эффективность системы и снижает риск ложных сигналов тревоги.
Уровень техники
Выявление лесных пожаров может производиться с использованием пассивных или активных способов. В активных способах используются лидарные технические средства, в то время как в пассивных способах используется либо обработка изображений, позволяющая выявить дым и пламя, либо статические детекторы, которые измеряют интенсивность излучения пламени, температуру, плотность и состав дыма. Активные системы имеют ряд преимуществ, в основном относящихся к возможности обнаружения пожара на более дальних расстояниях и более ранней стадии.
Большинство патентов, такие как патент Германии №4026676, патенты США №№5734335, 5422484, 5218345, 5049756, 5751209 и 5168262 относятся к пассивным системам с использованием статических детекторов. С другой стороны, в патентах ЕР 0984413, ЕР 818766 А1, США №5557260 и международной публикации WO 9408660 A1 описаны специальные системы видения, приспособленные для выявления пожара. Только два патента, США №4893026 и ЕР 978718 А1, посвящены активному обнаружению.
В патенте США №4893026 описана лидарная система, способная определять местонахождение объекта, который рассеивает в обратном направлении часть падающего лазерного луча. Однако эта система является одноосной, то есть лазерный луч и обратное излучение проходят по одной и той же траектории, и необходимо использовать поляризованное излучение для разделения излучаемого и принимаемого света. Система содержит оптический блок, который расширяет лазерный луч, улавливает обратное излучение, отделяет его от направленного луча и передает уловленное излучение для измерения детектором. В системе использован импульсный неодимовый ИАГ-лазер (Nd:YAG) с энергией в импульсе 300 мДж и частотой следования импульсов от 5 до 30 Гц. Угловое сканирование производится путем равномерного вращения выходного зеркала без какой-либо оптимизации в отношении окружающего ландшафта. Использование одноосного лидара ограничивает эффективность выявления из-за потерь на поляризацию и делает систему очень дорогой и сложной в обслуживании и эксплуатации. С другой стороны, низкая гибкость системы сканирования ограничивает использование системы на холмистых ландшафтах. Хотя автор не имеет экспериментального подтверждения, он оценивает дальность обнаружения в 20 км. В отличие от описанной системы предлагаемый лидар имеет двуосную или биаксиальную оптическую систему и использует процедуру сканирования, оптимизированную с учетом особенностей окружающего ландшафта. Без необходимости поляризации излучения предлагаемая система более эффективна, более проста в изготовлении и эксплуатации и позволяет выявлять пожары на более ранней стадии и на более удаленных расстояниях.
Европейский патент ЕР 978718 А1 относится к биаксиальной лидарной системе для обнаружения дыма, не имеющей механизма сканирования. Система предназначена для использования в замкнутых пространствах, таких как системы наблюдения в туннелях и на подземных автостоянках, и содержит зеркала для отражения или рассеяния лазерного луча для надлежащего перекрытия пространства наблюдения. Зеркала могут быть плоскими или криволинейными и обычно зафиксированы в неподвижном положении. Алгоритм обработки не приспособлен для перекрытия обширных площадей.
Упомянутые выше пассивные системы статических детекторов работают на основе определенной оптимизированной расстановки датчиков или сенсоров по площади наблюдения. Датчики выявляют присутствие частиц, дыма или теплового излучения в результате горения. Пассивные системы на основе наблюдения с помощью видеокамер получают изображения площади наблюдения, которые сравниваются с контрольными или опорными изображениями. При обработке изображений используются несколько способов, такие как фильтрация, наложение, отслеживание, цветовое сравнение, кластерное распознавание и другие. В некоторых детекторных системах используется обработка данных в режиме реального времени и статистические или основанные на нейронных сетях алгоритмы для улучшения детектирования.
Раскрытие изобретения
Изобретение предлагает биаксиальную активную систему обнаружения с использованием обратного лазерного излучения. Чувствительность данного способа выше чувствительности пассивных способов, что позволяет определять местонахождение пожаров на ранней стадии, когда пассивное обнаружение еще невозможно. С другой стороны, система дешевле и, в аспекте сооружения и эксплуатации, проще одноосных лидарных систем. Система обнаружения пожара с использованием биаксиального лазерного радара под управлением компьютера содержит устройство для сканирования лазерным лучом и блок обработки данных, контролируемый нейронной сетью.
Краткое описание чертежей
Пример осуществления изобретения будет описан далее со ссылками на чертежи, на которых:
фиг.1 иллюстрирует действие сети наблюдения, образованной двумя лидарными станциями и центром управления,
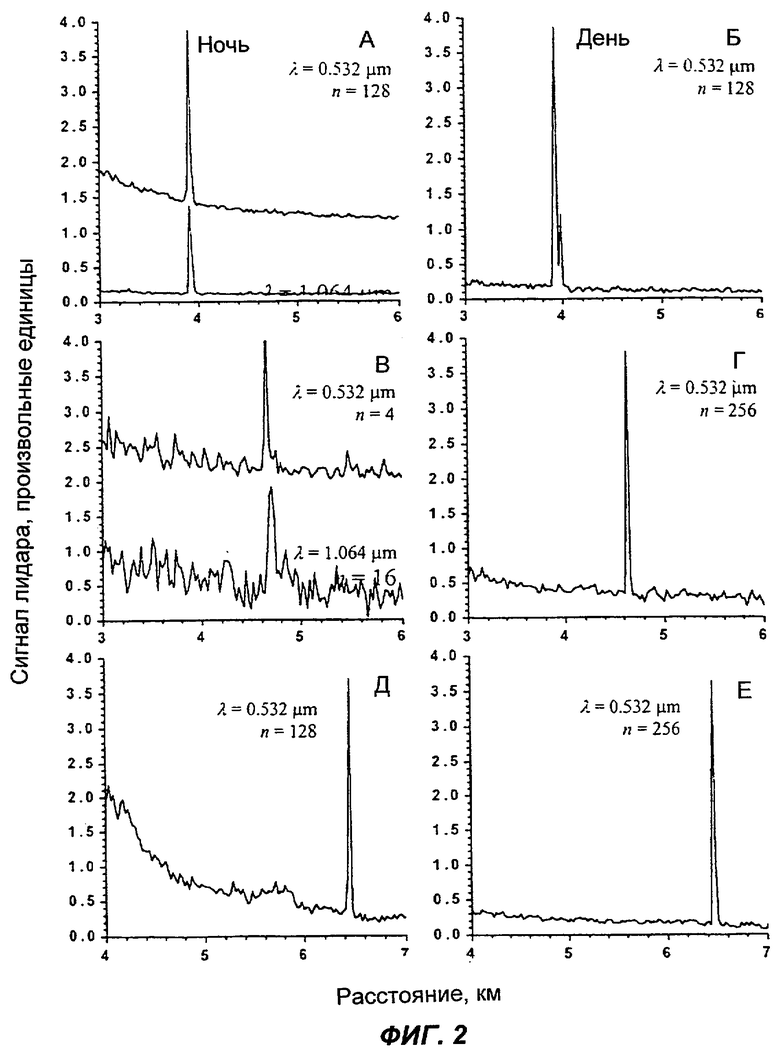
фиг.2 изображает типичные лидарные сигналы, полученные в экспериментальных условиях (А-Е), которые содержатся в таблице 2. Параметр n обозначает число обратных лидарных сигналов, отображенных в совокупности на кривой сигнала.
Осуществление изобретения
В данном изобретении описаны способ и система, предназначенные для обнаружения и определения местоположения дыма, в особенности, для раннего обнаружения лесных пожаров. Активный способ обнаружения основан на лидарной технологии. Он отличается от способа согласно патенту США №4893026 (1985) по меньшей мере в трех аспектах.
1) Предложенная лидарная станция имеет биаксиальную оптическую схему, в которой направляемое и обратное излучение проходят по различным оптическим траекториям. За счет этого лазерный луч может быть неполяризованным, что устраняет потери на разделение направленного и уловленного излучения посредством поляризации. Это отличие делает систему более простой и эффективной, чем одноосная конфигурация системы по упомянутому патенту.
2) Компьютерное управление лидарной станцией позволяет оптимизировать процедуру сканирования для определенной топографии и других характеристик площади наблюдения. Так например, высокая плотность дискретизации может использоваться в лесах или необитаемых районах. С другой стороны, большие площади со скалами и озерами могут перекрываться со значительно более низкой плотностью дискретизации. Учет статистических данных по предыдущим случаям пожаров создает возможность дальнейшей оптимизации процедуры сканирования.
3) Использование нейронной сети снижает вероятность ложных сигналов тревоги. Так например, сигналы по причине близости печного дыма могут быть включены в часть «отсутствие тревоги» той сети, с помощью которой обучается нейронная сеть. Благодаря природе алгоритмов нейронной сети не требуется предварительная обработка сигнала, такая как сглаживание, настройка диапазона и логарифмическое представление, что значительно упрощает обработку сигнала и повышает скорость реагирования.
В простейшем виде предлагаемая лидарная станция содержит лазер, оптическую систему с приемником для улавливания обратного излучения и детектором, блок сбора данных и предварительной обработки сигнала, а также компьютер для обработки сигнала и анализа, управляющий всей лидарной станцией и осуществляющий связь с внешними устройствами с помощью специального программного обеспечения. Оптический приемник содержит телескоп, соответствующий фильтр для используемого лазерного излучения и одну или более диафрагм. Детектор может представлять собой фотоэлектронный умножитель, фотопроводящий элемент или лавинный фотодиод.
Лазер периодически излучает импульсы фиксированной длины волны в диапазоне 0,2-12 мкм. Длина волны излучения должна быть выбрана в пределах одного из спектральных окон высокого атмосферного пропускания. Полоса пропускания фильтра приемника должна быть центрирована по длине волны лазерного излучения и иметь ширину от 0,1 до 10 нм. Импульсы могут иметь энергию от 1 мкДж до 1 Дж и частоту следования от 0,5 Гц до 20 кГц. При необходимости длина волны лазерного излучения может быть изменена с помощью оптического параметрического генератора, нелинейного кристалла или ячейки Рамана. Если энергия на квадратный метр превышает 5×10-3 Дж/м2, а длина волны находится в полосе высокой чувствительности человеческого глаза (0,4-1,4 мкм), следует использовать расширитель луча лазера.
Блок сбора данных и предварительной обработки сигнала содержит аналогово-цифровой преобразователь (АЦП) и другие аппаратные средства, необходимые для обработки сигнала. Для повышения соотношения сигнал/шум накапливают сигналы от последовательных лазерных импульсов. Конкретное число накапливаемых сигналов зависит от энергии импульсов лазера, частоты следования и длины волны. После накопления суммарный сигнал анализируется нейронной сетью.
Требуемый алгоритм распознавания лидарного сигнала выводится самой нейронной сетью из примеров, которые формируют обучающую сеть. Для ситуации «отсутствие тревоги» обучающая сеть содержит реальную картину площади наблюдения со всеми ее особенностями (холмы, растительность, дымящие трубы и другие объекты) для различных погодных условий. Для условий «включение тревоги» обучающая сеть может комбинировать компьютерные картинки с сигналами реального пламени.
Когда лидарная станция выявляет дым, блок обработки данных сообщает о параметрах пламени, а именно о расстоянии и угловых координатах, и включает сигнал тревоги. Если используется лидар (DIAL) дифференциального поглощения с той же биаксиальной конфигурацией возможно также получение информации о химическом составе дыма.
Когда система наблюдения содержит только одну лидарную станцию, она непрерывно сканирует ландшафт путем изменения азимута и угловой высоты с помощью управляемых компьютером шаговых двигателей. Если выявлен сигнал от какого-либо объекта, похожего на дым, система может повторно сканировать подозрительную площадь более тщательным образом для подтверждения наличия облака дыма.
Для охвата обширной площади наблюдения несколько лидарных станций могут быть объединены в сеть. В этой ситуации, если одна станция обнаруживает облако дыма, об этом факте сообщается в автоматический центр наблюдения, который передает указания соседним лидарным станциям временно прекратить обычные процедуры сканирования и проверить подозрительную площадь для подтверждения тревоги. Затем центр наблюдения анализирует сигналы от различных станций и при необходимости выдает сигнал тревоги.
Хотя алгоритмы обработки сигналов очень важны для выявления тревожной ситуации, соотношение сигнал/шум является базовым критерием для предварительной оценки качества детектирования. Несколько экспериментов, проведенных авторами, показали, что можно обнаружить небольшие дымки от костров с низкой интенсивностью горения порядка 0,02 кг/с, на таких существенных расстояниях, как 6,5 км. Следует заметить, что такой дым нельзя заметить с места расположения лидара даже с помощью обычного бинокля. Соотношение сигнал/шум для обнаруженного дыма находилось в диапазоне 50-160 в зависимости от атмосферных условий и фонового излучения.
РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТОВ
Для проверки работоспособности решения по изобретению была спроектирована, построена и испытана лидарная станция, характеристики которой представлены в Таблице 1.
Параметры лидарной станции, использованной в экспериментах.
Эксперименты были проведены в Алентехо, на юге Португалии, в период с 27 сентября по 7 октября 2000 года. Условия экспериментов содержатся в Таблице 2.
комплекс условий экспериментов
В течение этого периода было получено более 400 лидарных сигналов. Некоторые из них представлены на фиг.2. В ходе каждого эксперимента было сожжено около 100 кг древесины в течение 50-90 минут. Некоторые эксперименты были проведены в условиях дневного света (А, Г и Е), а другие в ночной период в менее благоприятных условиях, которые характеризовались более высокой влажностью и наличием легкого тумана.
Величины соотношения сигнал/шум для различных условий экспериментов приведены в Таблице 3.
Соотношение сигнал/шум, измеренное в различных условиях экспериментов
Во всех ситуациях сигнал был настолько сильным, что не требовалось дальнейшей обработки сигнала для подтверждения наличия облака дыма. Полевые испытания наглядно продемонстрировали возможность обнаружения облаков дыма лесных пожаров на ранних стадиях, даже когда интенсивность горения имела такую низкую величину, как 0,2 кг/с, на расстояниях свыше 6,5 км. Вычисления, выполненные авторами на основе лидарного моделирования и экспериментальных проверок, показали, что в случае удовлетворительных атмосферных условий и при соотношении сигнал/шум больше 5 дальность действия системы превышает 20 км.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛАЗЕРНОГО ЗОНДИРОВАНИЯ КРИСТАЛЛИЧЕСКИХ ОБЛАКОВ | 2022 |
|
RU2787316C1 |
| Способ обнаружения локальных очагов горения | 2024 |
|
RU2835391C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ЛАЗЕРНОГО ЗОНДИРОВАНИЯ КРИСТАЛЛИЧЕСКИХ ОБЛАКОВ | 2022 |
|
RU2790806C1 |
| МУЛЬТИСПЕКТРАЛЬНЫЕ ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2792948C2 |
| СПОСОБ ЛАЗЕРНОГО ЗОНДИРОВАНИЯ ПЕРИСТЫХ ОБЛАКОВ | 2022 |
|
RU2790804C1 |
| Лидарная система и способ с когерентным детектированием | 2020 |
|
RU2792949C2 |
| ОПТИЧЕСКИЕ СИСТЕМЫ И СПОСОБЫ УПРАВЛЕНИЯ ИМИ | 2020 |
|
RU2793241C2 |
| СПОСОБ И СЕРВЕР ДЛЯ ОБНОВЛЕНИЯ ПРЕДСТАВЛЕНИЯ КАРТЫ | 2024 |
|
RU2836391C1 |
| Лидарные системы и способы | 2020 |
|
RU2798363C2 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ВЫБОРОЧНЫМ СКАНИРОВАНИЕМ | 2020 |
|
RU2792951C2 |
Изобретение относится к способу обнаружения и определения местонахождения лесных пожаров на ранней стадии с использованием лидара. В простейшей конфигурации система содержит лазер и управляющий компьютер, который управляет системой сканирования лазерным лучом и производит автоматическое распознавание идентификационных признаков дыма в лидарном сигнале на основе алгоритма нейронной сети. Процедура сканирования оптимизирована для конкретной топографии и других характеристик площади наблюдения. Нейронная сеть смоделирована или выполнена в виде сопроцессора. Для охвата более широких площадей несколько лидарных станций могут быть объединены в сеть, что позволяет производить одновременное сканирование подозрительных площадей с помощью нескольких соседних лидаров для обеспечения максимальной эффективности и снижения числа ложных сигналов тревоги. Система позволяет обнаружить и определить местонахождение пожаров раньше и на большем расстоянии, чем пассивные системы, имеющие более низкую чувствительность. 5 з.п. ф-лы, 3 табл., 2 ил.
| КОМАШИНСКИЙ В.И., СМИРНОВ Д.А | |||
| Нейронные сети и их применение в системах управления и связи | |||
| Москва, Горячая линия - Телеком, 2002 | |||
| Способ раннего обнаружения пожароопасной ситуации | 1985 |
|
SU1277159A1 |
| Способ контроля наличия дыма в контролируемой среде и устройство для его осуществления | 1987 |
|
SU1550555A1 |
| Устройство для патентирования стальной проволоки | 1976 |
|
SU978718A3 |

