Изобретение относится к техническому обслуживанию высоковольтных линий электрических передач (ЛЭП), а именно, к контролю за безаварийным состоянием проводов, строящихся и находящихся в эксплуатации высоковольтных ЛЭП.
Известен способ определения параметров расположения контактного провода железнодорожного пути (патент RU 2191124 С2 7, В 60 М 1/12, 2002.10.20). Сущность способа заключается в том, что проводят два измерения в точках, расположенных на одной линии, перпендикулярной геометрической оси пути на уровне головок рельсов, и определяют из геометрических формул высоту положения контактного провода относительно головок рельсов и смещение контактного провода относительно геометрической оси. При этом измерение расстояний до контактного провода производят относительно точек (головок рельс), расположенных симметрично относительно геометрической оси пути с помощью ультразвукового прибора.
Недостатками этого способа является то, что определяется только взаимное положение геометрических осей контактного провода и железнодорожного пути. Кроме того, точность линейных измерений ультразвуковым дальномером ±100 мм, что недостаточно для определения удлинения провода от провисания под собственным весом. Для фиксации упомянутого удлинения проводов необходимо линейные измерения производить с точностью 3-5 мм.
Известен способ измерения натяжения рессорного троса (патент RU 2214334 7, В 60 М 1/22, G 01 L 1/00, 2003.10.20), согласно которому определяют расстояние между крайними точками подвеса рессорного троса, стрелу провеса и, зная его погонный вес, определяют по формуле величину натяжения рессорного троса, используемого для подвеса контактного провода на железных дорогах.
Удлинение троса под действием собственного веса в рамках этого способа получить невозможно в силу неопределенности решения этой задачи из-за недостаточности исходных данных и соответствующих действий.
Техническим результатом изобретения является возможность определения удлинения проводов высоковольтных линий, исключая непосредственный с ними контакт и тем самым обеспечение контроля за состоянием проводов высоковольтных ЛЭП.
Технический результат достигается тем, что в способе определения удлинения проводов на участках между опорами высоковольтных линий электрических передач (ЛЭП), согласно изобретению, на каждом участке между опорами ЛЭП через определенные периоды времени определяют координаты точек подвеса провода к опорам и координаты точки максимального провисания проводов под собственным весом, по которым определяют длину дуги провода между точками его подвеса на опорах по формуле

где l(ti) - длина дуги провода, определенная в момент времени ti; х1i, y1i, z1i и х2i, y2i, z2i - пространственные координаты соответственно первой и второй точек подвеса проводов к опорам ЛЭП на момент времени их определения ti; x3i, y3i, z3i - пространственные координаты точки максимального провисания проводов на момент времени их определения ti;  - высотная отметка точки, лежащей на пересечении вертикальной линии, проходящей через точку максимального провисания проводов, и линии, соединяющей точки подвеса проводов на опорах ЛЭП на момент времени ее определения ti;
- высотная отметка точки, лежащей на пересечении вертикальной линии, проходящей через точку максимального провисания проводов, и линии, соединяющей точки подвеса проводов на опорах ЛЭП на момент времени ее определения ti;  - угол между горизонтальной линией и линией, соединяющей точки подвеса проводов на опорах ЛЭП на момент времени ti, а величину удлинения получают как разность длины дуги провода одного и того же участка, полученной при втором и последующих периодических определениях, и первым ее определением по формуле
- угол между горизонтальной линией и линией, соединяющей точки подвеса проводов на опорах ЛЭП на момент времени ti, а величину удлинения получают как разность длины дуги провода одного и того же участка, полученной при втором и последующих периодических определениях, и первым ее определением по формуле
Δli=l(ti+1)-l(t1),
где Δli - удлинение проводов на момент времени ti+1; l(t1) - начальная длина дуги проводов при первом ее определении, на момент времени ti; l(ti+1) - длина дуги проводов при втором и последующих ее определениях на моменты времени ti+1, на каждом участке проводов между опорами ЛЭП получают несколько удлинений проводов Δli, из периодических измерений, соответствующих времени их определения ti+1, по этим данным выводят корреляционную зависимость удлинения от времени его определения, по которой определяют и прогнозируют удлинение проводов за любой промежуток времени.
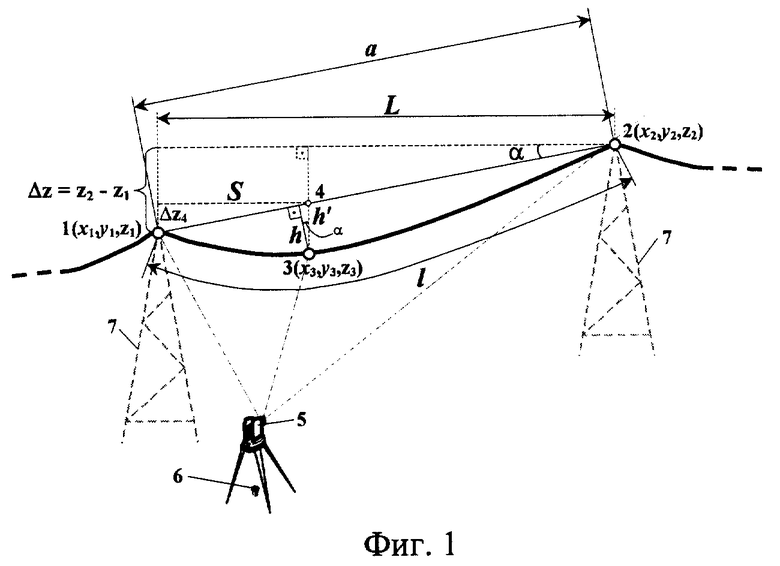
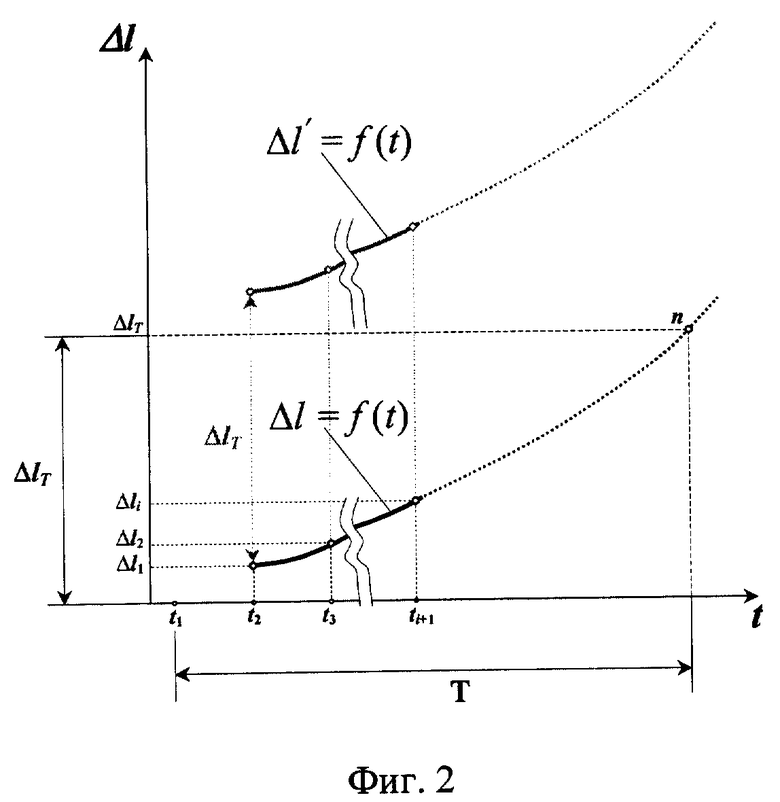
Способ поясняется чертежами, где на фиг.1 показана схема к определению длины дуги провода по координатам точек подвеса провода и точки его максимального провеса; на фиг.2 - принципиальная схема получения накопленного удлинения провода по экстраполяционному графику.
Для получения длины дуги l необходимо определение пространственных координат (x, y, z) точек 1, 2 - точек подвеса проводов к опорам ЛЭП, и 3 - точки максимального провисания провода в пролете между опорами ЛЭП (фиг.1).
Координаты можно получить путем измерения соответствующих горизонтальных и вертикальных углов оптико-механическим теодолитом и измерением расстояний светодальномером до точек 1, 2 и 3, для чего на эти точки необходимо устанавливать призменный отражатель. Все эти операции по угловым и линейным измерениям в настоящее время можно выполнить большинством современных электронных тахеометров, но также с установкой призменных отражателей в точках 1, 2 и 3. Учитывая, что установка отражателей в точках 1, 2 и 3, которые находятся на проводах, опасна и невозможна из-за высокого напряжения, то упомянутые измерительные системы для таких условий неприменимы.
Успешно решить эту задачу (определение координат точек, расположенных на высоковольтных проводах ЛЭП, без установки в определяемых точках призменных отражателей) можно современными электронными тахеометрами, имеющими режим измерения расстояний без отражателя. В результате появляется возможность определять координаты точек в таких местах, где установить отражатель трудно (большая высота), опасно и невозможно. Диапазон измерения расстояний в безотражательном режиме у различных приборов такого класса колеблется в пределах 350-600 м, точность измерений (определения координат) - 3-5 мм.
Как следует из схемы на фиг.1, точки подвеса проводов 1 и 2 могут находиться на разных уровнях, соответственно и точка максимального провисания 3 будет несколько смещена относительно середины пролета. С помощью электронного тахеометра в безотражательном режиме измерения определяют координаты точек 1, 2 и 3: x1, y1, z1; х2, y2, z2; х3, y3, z3. Имея координаты, можно определить длину дуги по следующему алгоритму:


отсюда 


где z4 - высотная отметка точки 4 (фиг.1);

где 
после подстановки (6) и (7) в (5), получим

теперь определим h':
h'=z4-z3,
откуда 
Длину дуги можно определить по известной формуле (Бронштейн И.Н., Семендяев К.А. Справочник по математике. Гос. издат. физико-математической литературы, М., 1962):

С учетом формул (1)-(9) формулу (10) можно преобразовать к следующему виду:

где x1, y1, z1 и х2, y2, z2 - пространственные координаты соответственно точек 1 и 2 подвеса проводов к опорам ЛЭП; х3, y3, z3 - пространственные координаты точки максимального провисания проводов 3;  - высотная отметка точки 4, лежащей на пересечении вертикальной линии, проходящей через точку максимального провисания проводов 3, и линии, соединяющей точки подвеса проводов 1 и 2 на опорах ЛЭП;
- высотная отметка точки 4, лежащей на пересечении вертикальной линии, проходящей через точку максимального провисания проводов 3, и линии, соединяющей точки подвеса проводов 1 и 2 на опорах ЛЭП;  - угол между горизонтальной линией и линией, соединяющей точки подвеса проводов 1 и 2 на опорах ЛЭП (фиг.1).
- угол между горизонтальной линией и линией, соединяющей точки подвеса проводов 1 и 2 на опорах ЛЭП (фиг.1).
Удлинение проводов на участках между опорами ЛЭП в основном происходит за счет провиса проводов под собственным весом при изменяющихся метеоусловиях (сезонные температурные изменения, ветровые нагрузки, нагрузки от оледенения и др.). Принципиально это удлинение можно зафиксировать следующим образом.
В момент времени t1 определим по вышеприведенному алгоритму длину дуги провода между опорами 4 ЛЭП - l(t1). Через определенный период времени, например, через 1 месяц, в момент времени t2 снова определим длину дуги провода между теми же опорами ЛЭП - l(t2). Тогда абсолютное удлинение от провиса под собственным весом Δl1 можно определить, как

Затем это удлинение можно выразить в процентах от первоначальной длины дуги, определенной в момент времени t1:

Продолжая мониторинг контроля за удлинением провода, в момент времени t3 определим длину дуги l(t3) и получим новое абсолютное и относительное удлинение относительно первоначальной длины дуги провода l(t1):


Проведя для момента времени t4 те же определения, получим


Аналогичные наблюдения делаются для моментов времени t5, t6,..., ti. При достижении относительного удлинения провода величины критического удлинения на этом участке необходимо ликвидировать аварийное удлинение. Так производится контроль удлинения провода одного пролета, такой же контроль, по той же схеме, осуществляется по другим проводам этого пролета и по другим пролетам, между другими опорами ЛЭП, и там, где относительное удлинение проводов достигнет критической величины, переводят этот участок проводов в разряд аварийного.
Изложенный выше способ позволяет фиксировать процесс удлинения проводов между опорами под действием собственного веса во времени. И если начать применять одновременно с момента ввода в эксплуатацию ЛЭП, то будем фиксировать процесс удлинения проводов с самого начала.
Для уже существующих ЛЭП, у которых процесс удлинения проводов уже идет и находится на какой-то определенной стадии развития, можно, применив изложенный выше способ, произвести оценку накопленного удлинения с момента начала эксплуатации ЛЭП и учесть это при проведении мониторинга. Это предлагается сделать методом экстраполяции выявленной тенденции развития процесса удлинения проводов во времени.
По способу, изложенному выше, получают Δl1, Δl2,..., Δli (см. формулы (1), (3), (5), при этом Δl1 соответствует моменту времени t2, Δl2 - моменту времени t3, Δl3 - моменту времени t4,..., Δli - моменту времени ti+1. По этим данным методами математической статистики можно получить корреляционную зависимость Δl=f(t), которая отражает тенденцию накопления удлинения проводов во времени. После подстановки в эту выведенную зависимость времени существования ЛЭП от начала ее эксплуатации до момента начала периодических наблюдений - Т, получим накопленное удлинение дуги провода между опорами ЛЭП к моменту первого наблюдения по определнию длины дуги провода - ΔlT. Это аналитическое решение. Эту же задачу по определению накопленного удлинения можно решить графически.
По тем же данным строим график зависимости удлинения провода Δl от времени его определения t (кривая Δl=f(t) на фиг.2). Зная время существования ЛЭП до момента начала мониторинговых наблюдений T, откладываем эту величину по оси «t» графика от точки, соответствующей моменту времени t1 (фиг.2). Учитывая тенденцию графика Δl=f(t), продолжаем его до пересечения с перпендикуляром, восстановленным от оси t из точки с абсциссой (t1+T) (т. n на фиг.2). Затем из т.n опускаем перпендикуляр на ось Δl, точка пересечения с которой даст величину удлинения ΔlT, что является накопленным удлинением проводов за время, прошедшее от начала эксплуатации ЛЭП до момента начала мониторинговых наблюдений.
Полученные из измерений Δl1, Δl2,..., Δli, по которым был построен график Δl=f(t), приводятся к тем удлинениям, которые имели бы место в случае совпадения по времени начала мониторинговых измерений с началом эксплуатации ЛЭП:
где ΔlT - накопленное удлинение проводов за время, прошедшее от начала эксплуатации ЛЭП до момента начала мониторинговых наблюдений, определенное по экстраполяционному графику (фиг.2). И далее, согласно способу определяют:
где l'(t1)=l(t1)-ΔlT.
Полученные Δi сравнивают с допустимым удлинением, откуда делается вывод о состоянии проводов. При этом продолжают начатый мониторинг по данной ЛЭП, вводя в каждое новое определение Δli в виде поправки величину ΔlT (см. формулу (18). В результате, если построить график зависимости исправленных удлинений Δl' от времени определения удлинений t, то получим график (кривая Δl'=f(t) на фиг.2), отражающий удлинение провода с момента его подвеса к опорам ЛЭП. Формально говоря, график Δl'=f(t) получен параллельным сдвигом графика Δl=f(t) на величину ΔlT по оси Δl.
График Δl=f(t) (фиг.2) достаточно построить или определить вид корреляционной зависимости по трем-четырем точкам, чтобы выявить тенденцию. Измерения по определению длины дуги на различные моменты времени в первом приближении делают 1 раз в неделю. В случае, если величины Δli будут получаться небольшими по абсолютной величине и по ним не выявить тенденцию процесса удлинения, частоту мониторинговых наблюдений следует уменьшить до 1 раза в две недели, до 1 раза в месяц и т.д. Т.е. найти такой период между измерениями, в пределах которого процесс удлинения будет фиксироваться прибором в явном виде, с проявлением тенденции увеличения Δli во времени.
Таким образом, используя выведенную корреляционную зависимость Δl=f(t), можно определять, какое удлинение проводов было на различные моменты времени в период от начала эксплуатации данной ЛЭП до начала таких периодических наблюдений, и прогнозировать накопление удлинений проводов на любой период времени вперед путем подстановки в Δl=f(t) интересующего нас времени. Для более точного прогноза как в сторону прошлого существования ЛЭП, так и в сторону ее будущего необходимо продолжать периодические наблюдения за процессом удлинения проводов и с учетом новых данных этих наблюдений осуществлять корректировку параметров уравнения корреляционной зависимости Δl=f(t).
Преимуществом предлагаемого способа является возможность определения удлинения провода (проводов) между опорами высоковольтных ЛЭП без непосредственного контакта с проводами, находящимися под высоким напряжением и подвешенных к опорам ЛЭП на достаточно большой высоте, то есть нет необходимости отключать ЛЭП во время проверки технического состояния проводов.
Предлагаемый способ предусматривается применять при техническом обслуживании высоковольтных линий электропередач в части контроля за безаварийным состоянием проводов, строящихся и находящихся в эксплуатации высоковольтных ЛЭП. Также возможно его применение и для оценки состояния проводов невысоковольтных ЛЭП, подвесных контактных проводов для железнодорожного и трамвайно-троллейбусного транспорта.
Изобретение относится к техническому обслуживанию высоковольтных линий электрических передач (ЛЭП) в части контроля за безаварийным состоянием проводов между опорами ЛЭП. Техническим результатом изобретения является возможность определения удлинения проводов между опорами высоковольтных ЛЭП без непосредственного контакта с проводами, находящимися под высоким напряжением и подвешенными к опорам ЛЭП на достаточно большой высоте. Способ характеризуется периодическим определением длин дуг проводов между опорами ЛЭП для нахождения удлинений проводов под действием собственного веса на каждый момент времени определений, по которым выводят корреляционную зависимость удлинения проводов от времени его определения, что позволяет прогнозировать удлинение проводов за любой промежуток времени. 2 ил.
Способ определения удлинения проводов на участках между опорами высоковольтных линий электрических передач (ЛЭП), характеризующийся тем, что на каждом участке между опорами ЛЭП через определенные периоды времени определяют координаты точек подвеса провода к опорам и координаты точки максимального провисания проводов под собственным весом, по которым определяют длину дуги провода между точками его подвеса на опорах по формуле

где l(ti) - длина дуги провода, определенная в момент времени ti;
х1i, y1i, z1i и x2i, y2i, z2i - пространственные координаты соответственно первой и второй точек подвеса проводов к опорам ЛЭП на момент времени их определения ti;
x3i, y3i, z3i - пространственные координаты точки максимального провисания проводов на момент времени их определения ti;
 - высотная отметка точки, лежащей на пересечении вертикальной линии, проходящей через точку максимального провисания проводов, и линии, соединяющей точки подвеса проводов на опорах ЛЭП на момент времени ее определения ti;
- высотная отметка точки, лежащей на пересечении вертикальной линии, проходящей через точку максимального провисания проводов, и линии, соединяющей точки подвеса проводов на опорах ЛЭП на момент времени ее определения ti;
 - угол между горизонтальной линией и линией соединяющей точки подвеса проводов на опорах ЛЭП на момент времени ti,
- угол между горизонтальной линией и линией соединяющей точки подвеса проводов на опорах ЛЭП на момент времени ti,
а величину удлинения получают как разность длины дуги провода одного и того же участка, полученной при втором и последующих периодических определениях, и первым ее определением по формуле
Δli=l(ti+1)-l(t1),
где Δli - удлинение проводов на момент времени ti+1;
l(t1) - начальная длина дуги проводов при первом ее определении на момент времени t1;
l(ti+1) - длина дуги проводов при втором и последующих ее определениях на моменты времени ti+1,
на каждом участке проводов между опорами ЛЭП получают несколько удлинений проводов Δli из периодических измерений, соответствующих времени их определения ti+1, по этим данным выводят корреляционную зависимость удлинения от времени его определения, по которой определяют и прогнозируют удлинение проводов за любой промежуток времени.
| СПОСОБ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ РЕССОРНОГО ТРОСА | 2002 |
|
RU2214334C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАСПОЛОЖЕНИЯ КОНТАКТНОГО ПРОВОДА ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2000 |
|
RU2191124C2 |
| СПОСОБ ОБНАРУЖЕНИЯ "ПЛЯСКИ" ПРОВОДОВ | 1991 |
|
RU2023336C1 |
| СИГНАЛИЗАТОР МАССЫ ГОЛОЛЕДНЫХ ОТЛОЖЕНИЙ И ОКОНЧАНИЯ ПЛАВКИ ГОЛОЛЕДА | 2002 |
|
RU2220485C1 |
| DE 3939677 А, 04.10.1990. | |||

