Область техники, к которой относится изобретение
Изобретение относится к области воздушного мониторинга с применением беспилотных летательных аппаратов (БПЛА), и может быть использовано в системах дистанционного контроля состояния высоковольтных воздушных линий электропередачи (ЛЭП), высоковольтных электроустановок, находящихся под напряжением, а также линий городского уличного освещения, состояния окружающей среды по заранее заданному маршруту, проходящему вдоль линии городского освещения или ЛЭП.
Уровень техники
В настоящее время все более широко применяются комплексы мониторинга окружающей среды с использованием беспилотных летательных аппаратов. Использование БПЛА позволяет снизить расходы на транспортировку (затраты на монтаж системы достаточно быстро окупаются), позволит осуществлять круглосуточный анализ состояния окружающей среды, криминальной обстановки, ДТП, противоправных действий, осуществляемых в зоне полетов БПЛА (вдоль линии городского освещения).
Из уровня техники известен автоматический беспилотный комплекс диагностики высоковольтных воздушных линий электропередачи (RU 2555585, МПК G01R31/08, G08G5/04, опубл. 10.07.2015 г.), содержащий дистанционно управляемый летательный аппарат, в котором установлена система автоматического управления, измеритель напряженности электрического поля. В блок памяти аппарата записан маршрут полета, параметры полета. Координаты летательного аппарата определяют с помощью приемника спутниковой навигационной системы.
Недостатком известного комплекса является ограничение длительности и дальности полета БПЛА в результате отсутствия возможности подзарядки его аккумуляторных батарей в процессе полета. Кроме того, в предложенном комплексе предусмотрен полет БПЛА только вдоль высоковольтной воздушной линии электропередачи. Первоначальное позиционирование БПЛА относительно ЛЭП осуществляется в ручном режиме, что снижает эффективность работы комплекса, требует специально обученного для управления БПЛА персонала.
Известен автоматический беспилотный комплекс диагностики протяженных объектов, оснащенных собственной информационной системой (RU 2343438, МПК G01M 3/00, опубл. 10.01.2009 г.), содержащий дистанционно-пилотируемый летательный аппарат, включающий планер, силовую установку, систему автоматического управления с блоком управления бортовыми системами, систему автоматического дистанционного управления полетом летательного аппарата и работой его систем, бортовую систему диагностики состояния протяженных объектов, а также мобильный наземный пункт управления летательным аппаратом, радиотелеметрическую систему двунаправленной связи летательного аппарата и его мобильного наземного пункта управления, состоящую из бортовой и наземной аппаратуры, по крайней мере, один комплект наземной аппаратуры радиотелеметрической системы, установленный на протяженном объекте в пределах прямой радиовидимости с дистанционно-пилотируемого летательного аппарата при его маловысотном полете и подключенный к собственной информационной системе протяженного объекта. Радиотелеметрическая система двунаправленной связи выполнена цифровой многоканальной, комплект наземной аппаратуры радиотелеметрической системы размещен на мачте и подключен модемом к собственной информационной системе протяженного объекта в его ближайшем локальном пункте.
Недостатком известного технического решения, как и предыдущего аналога, является отсутствие возможности подзарядки БПЛА в процессе его полета, что ограничивает дальность и длительность полета.
Известна система универсальных зарядных станций для беспилотных летательных аппаратов (US 9527605 (B1), МПК B64F1/12; B64F1/32; B65G43/00; B65G51/02; F21S8/08; F21W131/103), характеризующая тем, что зарядные станции могут быть подключены к центральному управлению и множеству других БПЛА, могут функционировать как центры по упаковке и отправке посылок, а также как конечные пункты назначения или транспортные узлы, могут осуществлять перезарядку/дозаправку БПЛА. Зарядные станции также могут осуществлять навигацию для управления БПЛА в радиусе действия станций и передавать маршрутную информацию центральному управлению. Зарядные станции могут быть встроены в существующие структуры, например, вышки сотовой связи, осветительные столбы, линии электропередач и здания.
Недостатком известного технического решения является отсутствие возможности эффективного дистанционного контроля состояния высоковольтных воздушных линий электропередачи, низкая безопасность и продолжительность полетов БПЛА, невозможность использования системы при низких температурах в районах крайнего севера, сложность монтажа, демонтажа и обслуживания комплекса при возможной замене или дополнении необходимыми функциональными элементами в процессе эксплуатации с необходимостью демонтажа элементов комплекса с опорной поверхности.
Раскрытие изобретения
Техническая задача, на решение которой направлено настоящее изобретение, заключается в создании эффективного автоматического комплекса дистанционного контроля состояния высоковольтных воздушных линий электропередачи (ЛЭП), высоковольтных электроустановок, находящихся под напряжением, а также линий городского уличного освещения и состояния окружающей среды.
Техническим результатом является повышение эффективности дистанционного контроля состояния высоковольтных воздушных линий электропередачи (ЛЭП), высоковольтных электроустановок, находящихся под напряжением, а также линий городского уличного освещения и состояния окружающей среды, повышение безопасности полета, проведения диагностики и обслуживания комплекса, упрощение монтажа, демонтажа, сборки и обслуживания комплекса, сокращение сроков диагностики, возможность замены или дополнения элементов устройства в процессе эксплуатации без необходимости демонтажа элементов комплекса с опорной поверхности, возможность использования комплекса при любых погодных условиях, в том числе в районах крайнего севера, уменьшение количества возникновения аварийных ситуаций.
Технический результат достигается за счет того, что автоматический комплекс дистанционной диагностики электросетевого оборудования включает, по меньшей мере, одну опорную поверхность, размещенную на опорной поверхности навигационную станцию с площадкой для приема, по меньшей мере, одного беспилотного летательного аппарата, беспилотный летательный аппарат, взаимодействующий по беспроводному каналу связи с указанной площадкой и центр управления, причем навигационная станция выполнена из, по меньшей мере, одного модульного корпуса, на наружной поверхности которого выполнены пазы и выступы, наружная поверхность которого образует площадку для приема, по меньшей мере, одного беспилотного летательного аппарата, причем площадка для приема, по меньшей мере, одного беспилотного летательного аппарата выполнена с возможностью беспроводной зарядки, обогрева и хранения беспилотного летательного аппарата, а, по меньшей мере, один модульный корпус навигационной станции содержит, по меньшей мере, одно функциональное оборудование.
Пазы и выступы, выполненные на наружной поверхности модульного корпуса взаимокомплементарны пазам и выступам соединительного элемента и/или такого же модульного корпуса для соединения корпусов между собой под разными углами.
Модульный корпус представляет собой замкнутый профиль удлиненной прямоугольной или круглой формы.
Модульный корпус навигационной станции содержит торцевые крышки.
Торцевые крышки выполнены с, по меньшей мере, одной парой симметричных «Г» - образных выступов, образованных на наружной поверхности крышки и служащих для крепления платы со светодиодами и рассеивателем.
Торцевые крышки выполнены с, по меньшей мере, одним набором продольных выступов и пазов, взаимокомплементарным выступам и пазам соединительного элемента или корпуса.
Выступы и пазы соединительного элемента расположены продольно вдоль всей его длины.
На конце каждого выступа соединительного элемента вдоль всей его длины выполнено шарообразное утолщение, а нижний край каждого паза сформирован в виде шарообразной выемки аналогичной формы, образованной вдоль всей дины паза.
Функциональное оборудование установлено внутри и/или на наружной поверхности модульного корпуса навигационной станции.
Опорная поверхность, на которой размещена навигационная станция, выполнена стационарной или подвижной.
На навигационной станции и на БПЛА установлены, по меньшей мере, по одной видеокамере.
Связь между навигационной станцией, БПЛА и центром управления осуществлена через беспроводные каналы связи.
Связь между функциональным оборудованием навигационной станции осуществлена через Bluetooth.
Связь навигационной станцией с БПЛА и навигационной станции с центром управления осуществлена через Wi-Fi или LoRA WAN или GPS-ГЛОНАСС или GSM.
В модульном корпусе навигационной станции установлен инфракрасный источник тепла, обеспечивающий обогрев станции, БПЛА и его аккумуляторов.
Навигационная станция содержит систему жесткого автоматического крепления БПЛА для его подзарядки, обогрева, хранения в спящем режиме и в случаях наступления сложных метеоусловий.
Система жесткого автоматического крепления БПЛА содержит ультразвуковые датчики, расположенные на БПЛА и навигационной станции.
Краткое описание чертежей
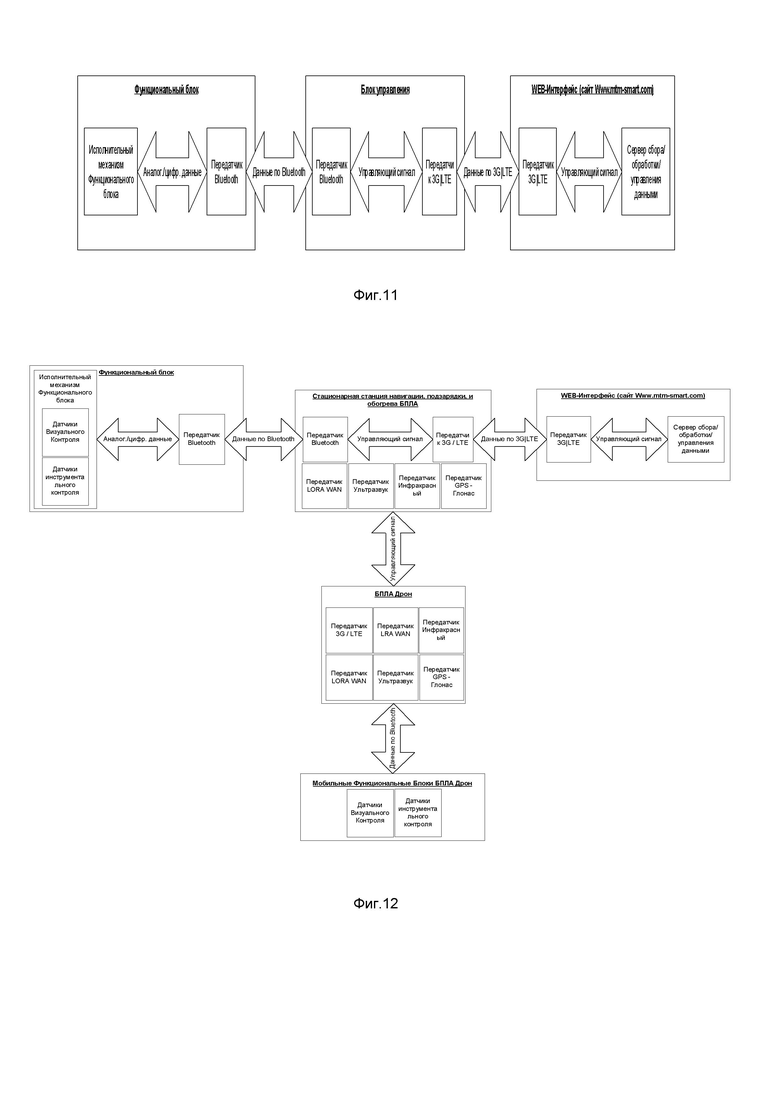
Фиг.1 - Вид в разборе модульного корпуса навигационной станции;
Фиг.2 – Расположение модульных корпусов навигационной станции на столбах уличного освещения;
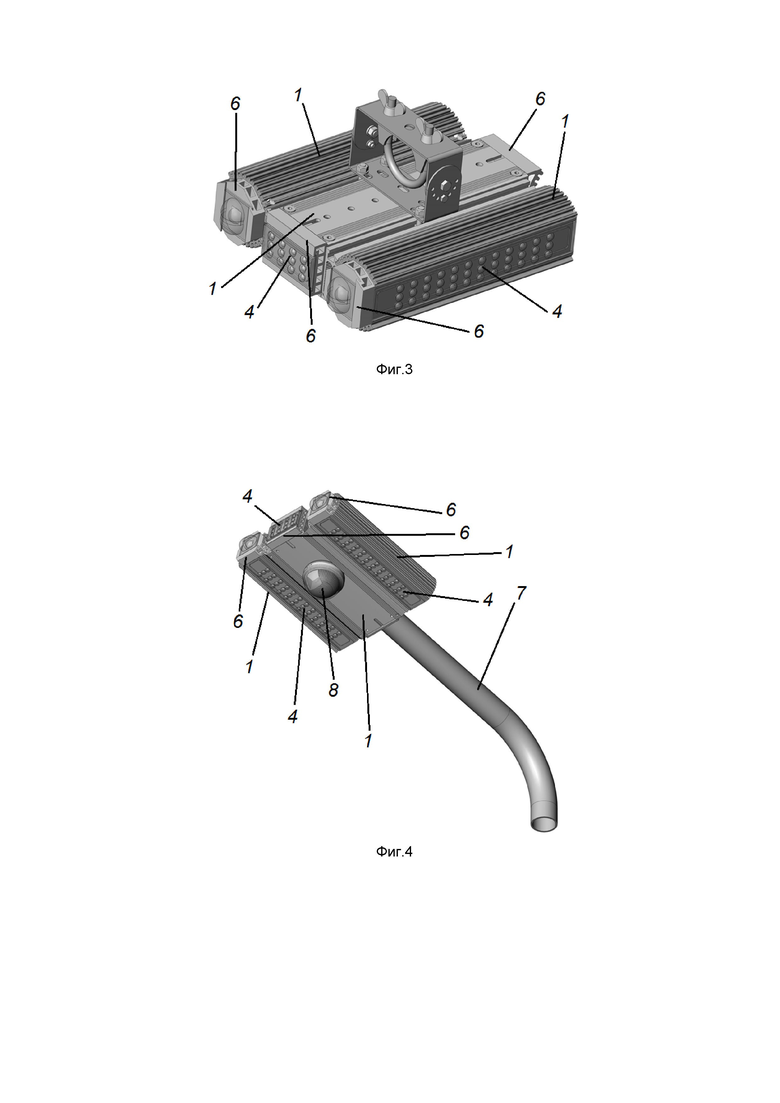
Фиг.3 – Вид навигационной станции, собранной из нескольких корпусов;
Фиг.4 – Вид навигационной станции, расположенной на столбе уличного освещения, оснащенной видеокамерой;
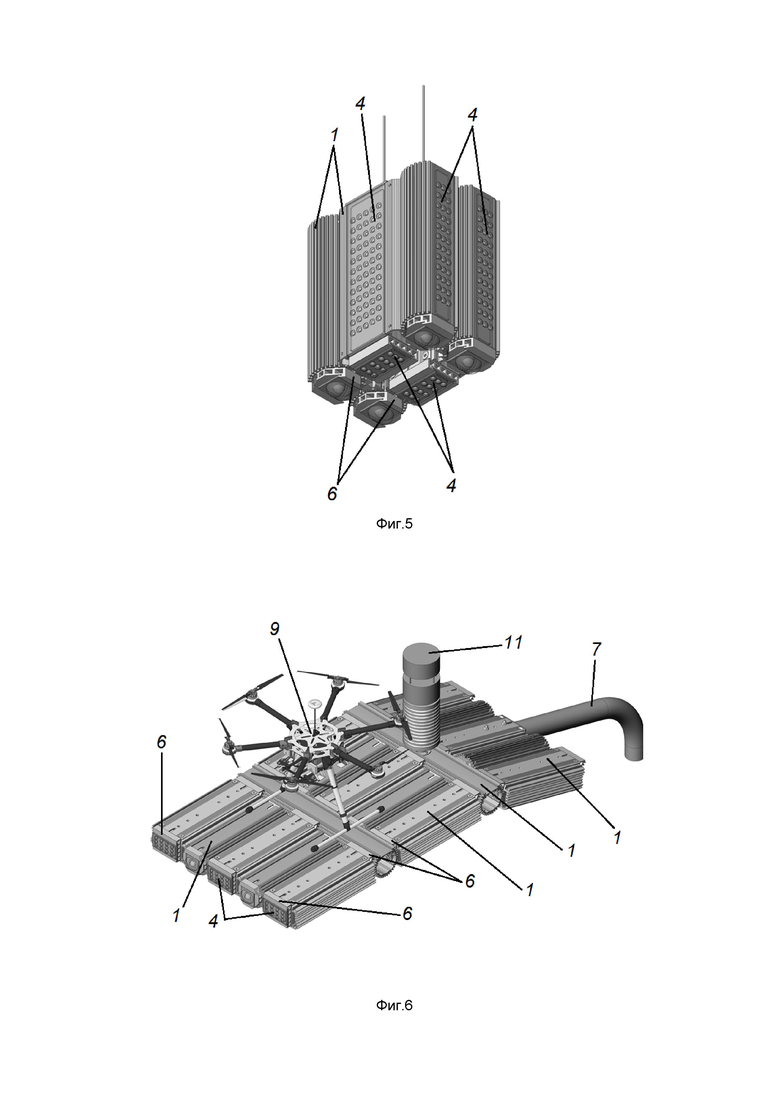
Фиг.5 – Вид навигационной станции, собранной из шести корпусов;
Фиг.6 – Вид навигационной станции, установленной на столбе, с размещенными на ней БПЛА и метеостанцией;
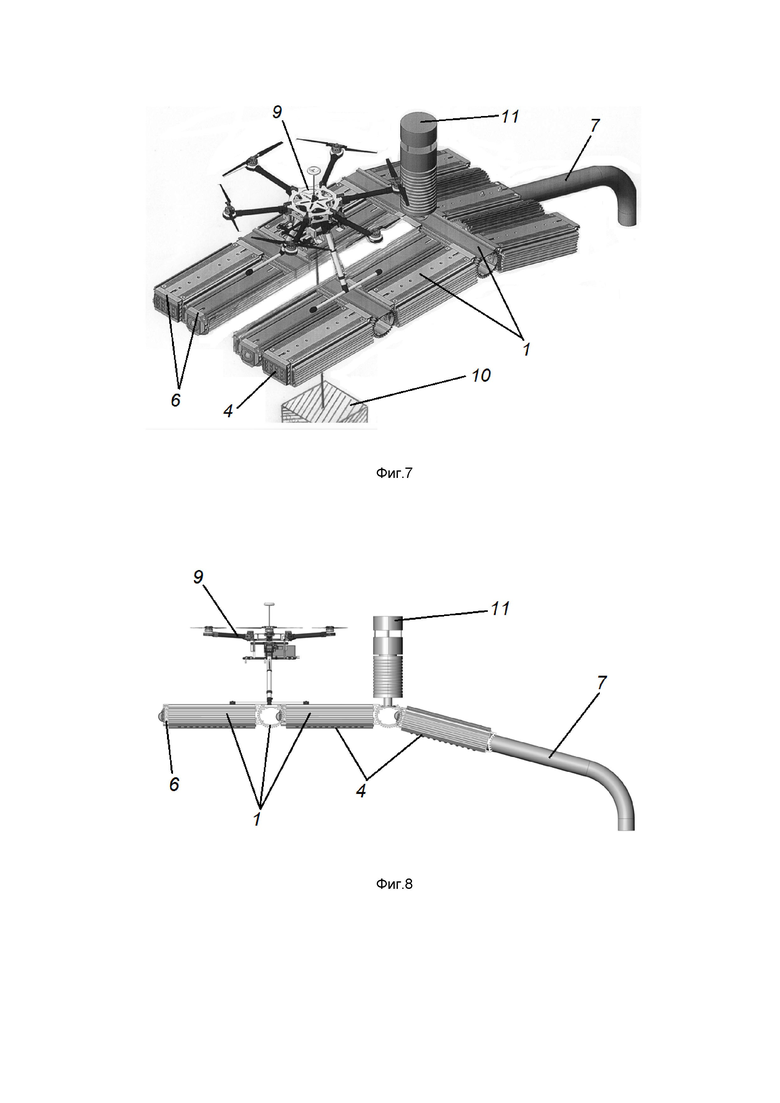
Фиг.7 – Вид навигационной станции, установленной на столбе, с размещенными на ней БПЛА с грузом и метеостанцией;
Фиг.8 – Вид навигационной станции сбоку, установленной на столбе, с размещенными на ней БПЛА и метеостанцией;
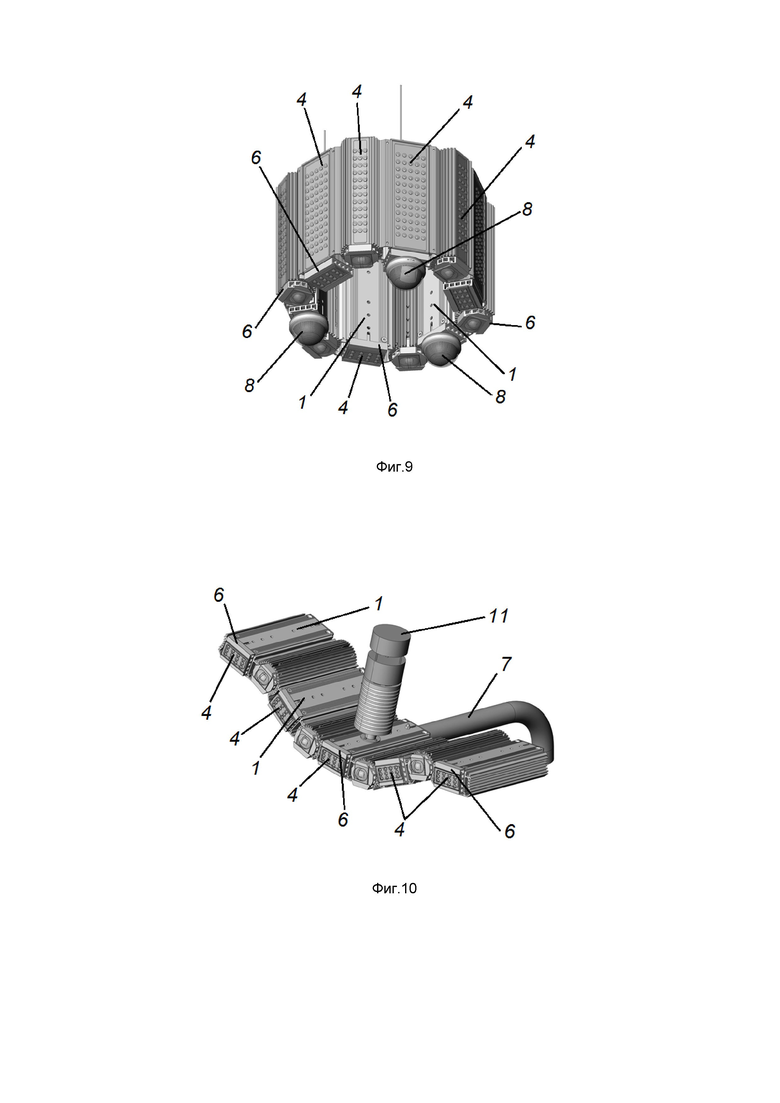
Фиг.9 – Вид навигационной станции, собранной из двенадцати корпусов в виде кольца с видеокамерами;
Фиг.10 – Вид навигационной станции, установленной на столбе, собранной из девяти корпусов с метеостанцией;
Фиг. 11 - схема передачи информации между функциональными блоками и блоком управления навигационной станции и центром управления.
Фиг. 12 - схема передачи информации между функциональными блоками и блоком управления навигационной станции, БПЛА и его блоками и центром управления ().
Осуществление изобретения
Заявленный комплекс обеспечивает автоматизированное следование БПЛА вдоль опорных конструкций и линий ЛЭП без участия оператора по заранее заданному алгоритму обследования и мониторинга элементов конструкций ЛЭП (маршруту полета).
Комплекс состоит из навигационной станции, которая может быть установлена, как на стационарных опорных поверхностях (например, столбах уличного освещения или мачтах высоковольтных ЛЭП или непосредственно на высоковольтных проводах ЛЭП или на трансформаторных подстанциях), так и на подвижных (мобильных) опорных поверхностях (например, транспортном средстве), БПЛА и центра управления.
Задачами навигационной станции являются: автоматическое определение координат местонахождения БПЛА для автоматического управления и корректировки маршрута и времени полетов БПЛА вдоль высоковольтных линий электропередач ЛЭП, автоматическая посадка для подзарядки БПЛА, хранения и обогрева (освобождения от инея, снега, льда) неиспользуемых БПЛА (и их аккумуляторов) в спящем режиме, или в случае возникновения СМУ (сложных метеоусловий) препятствующих безопасному автоматическому полету БПЛА вдоль высоковольтных ЛЭП.
Навигационная станция может состоять из одного или нескольких быстро монтируемых раздельных модульных корпусов 1, представляющих собой замкнутый профиль удлиненной прямоугольной и/или круглой формы с выполненными на наружной поверхности корпусов взаимокомплементарными пазами 2 и выступами 3 для соединения корпусов 1 между собой под разными углами.
По меньшей мере в одном корпусе 1 и/или на его поверхности, установлено функциональное оборудование, обеспечивающее работу навигационной станции. Корпуса выполнены методом экструзии из алюминия или его сплавов, либо из полимерного высокопрочного материала с высокой степенью теплопроводности. Разъемное соединение корпусов 1 позволяет доукомплектовывать навигационные станции дополнительными корпусами 1, а также заменять или доукомплектовывать сами корпуса 1 дополнительным функциональным оборудованием в процессе их эксплуатации.
На наружной поверхности каждого корпуса 1 могут быть выполнены различные продольные выступы (например Т - образные) и пазы, обеспечивающие крепление в них крепежных элементов (болтов, винтов), а также элементов несущих конструкций, подвесного и иного оборудования. Выступы также выполняют функцию ребер охлаждения, отводя тепло от корпуса.
Одна из наружных поверхностей корпуса снабжена, по меньшей мере, одной парой симметричных продольных Г-образных выступов, обеспечивающих установку в них, по меньшей мере, одной платы 4 с, по меньшей мере, одним светодиодным источником света. Плата 4 может быть выполнена монолитно или раздельно с защитной светопрозрачной панелью. Отдельная защитная светопрозрачная панель устанавливается в Г-образные выступы одновременно вместе с платой. Плата 4 выполнена из алюминия или его сплавов.
Выполнение корпусов 1, из которых состоит навигационная станция, со светодиодными платами 4, несет также на себе функцию осветительного устройства, формирующего заданные зоны освещения для наилучшего мониторинга окружающей среды, безопасного обслуживания и ремонта комплекса.
Над каждым светодиодом может быть установлена собирающая или рассеивающая линза или оптический отражатель защитной светопрозрачной панели.
На поверхность платы, соприкасаемой с корпусом, может быть нанесена теплопроводящая паста, которая исключает образование воздушного зазора между платой и корпусом, тем самым обеспечивается улучшенный отвод тепла от светодиодов через плату, теплопроводящую пасту, корпус и выступы на корпусе. Между платой и корпусом может быть установлен термоэлектрический модуль, работающий на основе эффекта Пельтье (на чертежах не показан), который может выполнять функцию отвода части тепла от платы, либо осуществлять выработку электрической энергии за счет разности температур между платой и корпусом.
Платы 4 со светодиодами могут быть выполнены разной длины, что позволяет комплектовать один корпус несколькими платами, как с одинаковыми светотехническими характеристиками светодиодов и защитной светопрозрачной панели, так и с совершенно разными характеристиками.
Пар Г-образных выступов может быть и больше, при этом выступы образованы один над другим. В этом случае одна пара выступов служит для установки платы 4 с источниками света, а вторая пара выступов - для установки светопрозрачной защитной панели.
Защитная панель выполнена из светопрозрачного стекла или полимерного материала, например, монолитного поликарбоната, различных форм и цветов. Светопрозрачная панель защищает светодиоды от воздействий внешней окружающей среды и учувствует в распределении светового потока от светодиодов.
Светодиоды могут быть расположены как равномерно, так и неравномерно по поверхности платы в зависимости от требуемой диаграммы направленности светового потока. Светодиоды соединены между собой последовательно в, по меньшей мере, одну ветвь, подключаемую к функциональному оборудованию. В ветви светодиодов могут быть включены светодиоды как одинакового, так и различного цвета. Для формирования заданных зон освещения ветви светодиодов могут быть выполнены на светодиодах с одинаковой диаграммой направленности излучения или с разной диаграммой направленности излучения. В конструкции осветительного устройства могут быть применены светодиоды различной мощности.
При необходимости получения наиболее яркого светового потока применяют светодиоды большей мощности, например, белого цвета, количество размещенных на плате светодиодов увеличивают, при этом посредством соединения корпусов 1 осветительного устройства под разными углами добиваются максимального его световыделения.
Для соединения корпусов 1 друг с другом также может быть использован, по меньшей мере, один соединительный элемент с расположенными на нем выступами и пазами повторяющейся формы, комплементарными выступам и пазам корпуса 1. Выступы и пазы расположены продольно вдоль всей длины элемента. На конце каждого выступа вдоль всей его длины выполнено шарообразное утолщение, а нижний край каждого паза сформирован в виде шарообразной выемки аналогичной формы, образованной вдоль всей дины паза. Соединение корпуса с соединительным элементом осуществлено по типу замкового соединения. Посредством соединительных элементов обеспечивается разъемное жесткое соединение корпусов 1 между собой.
Соединительный элемент может быть выполнен любой формы и изготовлен методом экструзии из алюминия или его сплавов, либо из полимерного высокопрочного материала с высокой степенью теплопроводности.
Соединительные элементы обеспечивают высокую прочность соединения корпусов друг с другом за счет большой площади трения соединительного элемента и корпуса 1, благодаря материалу изготовления соединительного элемента.
Использование соединительного элемента обеспечивает соединение корпусов 1 друг с другом под углом от 0 ° до 180 °.
Количество и размеры выступов (ребер) корпуса 1 могут быть различными, в зависимости от мощности и количества применяемых светодиодов и особенностей конструкции станции как осветительного устройства. Возможен вариант выполнения выступов и в виде декоративного рельефа.
Внутренние боковые поверхности полости корпуса снабжены продольными параллельными выступами, расположенными преимущественно на одинаковом расстоянии друг от друга. Выступы являются ребрами охлаждения: повышают теплоотвод от корпуса и служат элементами крепления во внутренней полости функционального оборудования, включающего в себя, в том числе, пускорегулирующее оборудование (блок питания и другие элементы). Поверхность выступов может быть выполнена с насечками (волнистой). Наличие насечек повышает поверхность теплоотвода. Корпуса 1 выполняют как несущую функцию для установленного в нем оборудования и функцию уличного освещения, так и функцию радиатора охлаждения, отводя тепло, выделяемое при работе светодиодами, в окружающую среду.
В каждом корпусе 1 или на его поверхности может быть установлено, по меньшей мере одно функциональное оборудование.
Функциональное оборудование может быть расположено в индивидуальном корпусе 5, устанавливаемом во внутреннюю полость корпуса 1 путем фиксации между выступами, образованными во внутренней полости корпуса.
Индивидуальный корпус 5 для установки функционального оборудования (блок питания, блок управления и пр.) может быть выполнен в виде полой коробки с герметично задвигаемой крышкой, установленной на плоском основании так, что площадь основания больше площади поперечного сечения коробки, что позволяет его устанавливать внутрь полости корпуса 1 между выступами боковых сторон. При этом размер коробки подбирается такой, что при установке ее с основанием в модульный корпус 1, между коробкой и выступами внутренней поверхности корпуса должно оставаться расстояние, обеспечивающие движение воздуха внутри корпуса 1. Корпус для установки функционального оборудования выполнен из высокопрочного теплопроводного полимерного материала методом литья, или из алюминия или его сплавов методом экструзии.
На верхней поверхности модульного корпуса 1 могут быть выполнены вентиляционные отверстия, служащее для отвода тепла от светодиодной платы и блока питания. При чем, охлаждающий поток внутри корпуса организован таким образом, что, перемещаясь внутри корпуса он защищает функциональное оборудование от перегрева.
Благодаря выступам сверху и с боков к профилю корпуса 1 могут крепиться декоративные элементы, предназначенные для изменения внешнего вида навигационной и в то же время осветительной станции и привязки дизайна к окружающей архитектуре.
Питание между корпусами 1 подключаются вручную с помощью водозащищенных коннекторов IP-65. Сборка (соединение) корпусов 1 между собой осуществляется вручную.
Коммутация электронных компонентов корпусов 1 между собой может происходить автоматически по беспроводным каналам с индикацией на ВЕБ сайте управления.
К торцам профиля модульного корпуса 1 разъемно могут быть присоединены крышки 6. Торцевые крышки 6 выполнены методом литья под давлением или прессования из полимерного материала, имеющего высокую степень прочности и теплопроводности.
Торцевая крышка 6 может быть выполнена с, по меньшей мере, одной парой симметричных «Г»- образных выступов, образованных на наружной поверхности крышки и служащих для крепления платы со светодиодами и рассеивателем, так и для крепления торцевых декоративных элементов. Также торцевая крышка 6 может быть выполнена с, по меньшей мере, одним набором продольных выступов и пазов, комплементарным выступам и пазам соединительного элемента или корпуса. Торцевая крышка предназначена для соединения корпусов торцевыми сторонами как под углом по отношению друг к другу, так и в одной плоскости.
В центральной части крышек 6 может быть выполнено сквозное отверстие, обеспечивающее конвекцию воздуха внутри корпуса осветительного устройства, с целью охлаждения установленного в нем оборудования. В крышке 6 могут быть выполнены, по меньшей мере, четыре отверстия, обеспечивающие надежное ее крепление к модульному корпусу посредством крепежных элементов (болтов, винтов).
Верхняя и боковые стороны крышки 6 могут быть выполнены, повторяющими по форме выступы на верхней и боковых наружных поверхностях модульного корпуса 1. Это обеспечивает возможность установки крепежных элементов на корпусе 1 без демонтажа крышек 6.
Торцевые крышки 6 могут быть выполнены в виде декоративных крышек, предназначенных для улучшения внешнего вида светильника, привязки дизайна светильника к окружающей архитектуре. Торцевые крышки 6 могут быть выполнены глухой выпуклой формы, либо со сквозным отверстием увеличенного размера.
Также, в одной из торцевых крышек 7 может быть выполнено отверстие для подвода электрического провода внутрь корпуса 1 к функциональному оборудованию.
Под функциональным оборудованием подразумеваются различные функциональные блоки, датчики, расположенные в корпусах 1 (и/или на внешней поверхности корпуса) навигационной станции, которые могут в себя включать: блок питания с интегрированным электросчётчиком для расчёта потребления электроэнергии по каналам 220v и 12v с возможностью дистанционной передачи данных на единый сервер, блок управления с системой передачи внутренних управляющих сигналов между блоками навигационной станции и с системой передачи внешних управляющих сигналов между навигационной станцией, БПЛА 9 и центром управления (управляющие сигналы могут быль различными), приемо-передатчик GPS координат, ретранслятор GSM, ретранслятор Wi-Fi, блок ультразвуковой системы навигации и посадки БПЛА, блоки системы крепления, обогрева и хранения БПЛА, зарядное индукционное устройство для беспроводной зарядки аккумуляторов БПЛА, функциональный блок видеокамеры, барометрический датчик. Также для дистанционной диагностики элементов ЛЭП на навигационной станции может устанавливаться такое дополнительное оборудование, как: тензодатчики механического натяжения проводов в точке подвеса, размещенные непосредственно на опорах ЛЭП, датчики для измерения тока в проводе, датчик температуры провода в пролете, датчик измерения затухания в оптических волокнах грозотроса или фазового провода, датчик для измерения критических стрел провеса, метеостанция 11 (датчик климатических условий), акселерометр, видеокамера 8 и пр.
Навигационная станция, выполненная из одного или нескольких корпусов 1, установленных, например, на столбах уличного освещения 7 и/или опорах ЛЭП, с расположенным в них функциональным оборудованием, образует своей поверхностью площадку для приема, по меньшей мере, одного беспилотного летательного аппарата, а именно площадку для автоматической посадки БПЛА, подзарядки аккумуляторов БПЛА; обогрева БПЛА и его аккумуляторов; хранения в спящем режиме в случае возникновения сложных метеорологических условий, препятствующих безопасному полету.
БПЛА 9, выполненный, например, в виде мультикоптера, может быть различных размеров, форм, иметь различную грузоподъемность и дальность полета, осуществляя полеты как вдоль, так и перпендикулярно линии городского освещения.
Задачами БПЛА являются: осуществление автоматических плановых и внеплановых полетов вдоль высоковольтных линий воздушной передачи электроэнергии, осуществление дистанционной диагностики конструкций (с помощью комплекса модульного диагностического оборудования, монтируемого на БПЛА) элементов высоковольтных линий воздушной передачи электроэнергии при полете вдоль них по заданному алгоритму, передача информации о текущем стоянии элементов высоковольтных линий воздушной передачи электроэнергии на сервер центра управления.
На БПЛА 9 установлено свое функциональное оборудование, с помощью которого БПЛА взаимодействует через беспроводные каналы связи с навигационной станцией.
При взаимодействии с навигационной станцией БПЛА 9 (мультикоптер) осуществляют автоматизированное следование вдоль опорных конструкций и линий ЛЭП без участия оператора по заранее заданному алгоритму обследования и мониторинга элементов конструкций ЛЭП (маршруту полета).
На БПЛА 9 могут быть установлены: приемо-передатчик GPS координат БПЛА, ретранслятор GSM для передачи сигналов диагностической информации с БПЛА, ретранслятор Wi-Fi для передачи координат и диагностической информации с БПЛА, ультразвуковую систему навигации и посадки для организации диагностического полета БПЛА вдоль конструкций и элементов воздушных высоковольтных линий передач электроэнергии ЛЭП, зарядное индукционное устройство для беспроводной зарядки аккумуляторов БПЛА, барометрический датчик, гироскоп, пилоны для подвеса груза (модульного диагностического оборудования) 10, например, модульного диагностического оборудования. Также для диагностики элементов ЛЭП на БПЛА может быть установлено такое модульное диагностическое оборудование, как: видеокамера высокого разрешения, инфракрасная (тепловизионная) камера с блоком контроля, камера с блоком ультрафиолетового контроля и электронно-оптической дефектоскопии (обнаружение коронарного разряда при его переходе с верхней фазы на нижнюю - показывает места будущих неисправностей), блок ультразвукового контроля усталости металла (исследование нагружаемых конструкций грозотросов, шлейфов, изоляторов, траверс, виброгасителей и опор ЛЭП на предмет усталости металла и его разрушения), блок измерения затуханий в оптических волокнах грозотроса или фазного провода, блок визуального (видео) контроля механических повреждений провода и мест их крепления, блок измерения критических стрел провеса, блок поиска точек замыкания на землю (измерение расстояния от высоковольтных проводов до земли или возникших объектов (сооружения, техника, растительность, изменения рельефа и пр.)), блок контроля обледенения проводов, видеокамера для контроля состояния БПЛА и другие блоки, не ограниченные вышеуказанным списком и назначением.
Питание навигационной станции, ее функциональных блоков и дополнительных датчиков блоков, необходимых для высококачественного функционирования может осуществляться от:
- индукционного модуля (токового трансформатора), преобразующего электромагнитное поле переменного тока, образующегося вокруг проводов высоковольтных ЛЭП, где в качестве источника возбуждения (первичная обмотка трансформатора) используется токонесущий провод ЛЭП. Вторичная обмотка трансформатора - тороидальная катушка с ферро магнитным сердечником. Модуль индукционного источника питания состоит из токового трансформатора, выпрямителя, аккумулятора энергии (ионистора) и преобразователя напряжения, который обеспечивает работу всех цифровых и аналоговых узлов функциональных модулей.
- сети питания 220v сети городского питания трансформаторной подстанции.
- альтернативных источников электроэнергии комплекса, состоящего из вертикальных ветрогенераторов, солнечных панелей, аккумуляторных батарей и пр.
- автономных генераторов на жидком топливе (бортовой системы электропитания, транспортных средств).
Блок управления (GSM коммутатор) расположен в корпусе навигационной станции и предназначен для сбора данных с функциональных блоков с помощью Bluetooth и передачи их на сервер центра управления с помощью GSM канала, также для приема управляющих команд с сервера и передачи их на функциональные блоки.
Датчики GPS – Глонасс, ЛОРА, размещенные на станции необходимы для определения координат местонахождения самой станции управления БПЛА. Датчики GPS-Глонасс, ЛОРА, размещенные на БПЛА необходимы для определения первичных координат местонахождения БПЛА при его полете. Может быть применена другая система передачи внешних и внутренних управляющих сигналов от БПЛА станции и наоборот. Система GPS - Глонасс используется для общей навигации БПЛА при полетах по маршруту вдоль линий ЛЭП, а именно обеспечивает: осуществление общего контроля местонахождения БПЛА (географических координат и высоты полета) в районе полетов вдоль линий передачи электроэнергии, первоначальное наведение БПЛА в зону расположения ИПМ (Исходный Пункт Маршрута), вывод БПЛА на зону расположения КПМ (Конечный Пункт маршрута) при пролете через зоны расположения ППМ (Промежуточные Пункты Маршрута).
Ретранслятор GSM, установленный как на станции, так и на БПЛА, используется для передачи сигналов диагностической информации с БПЛА.
Ретранслятор Wi-Fi используется для определения координат местонахождения самой станции и передачи координат и диагностической информации с БПЛА.
Барометрический датчик высоты, установленный на станции, используется для определения высоты нахождения станции управления БПЛА, а также для приведения данных с датчиков, расположенных на всех станциях по маршруту полета БПЛА, к общей барометрической высоте их расположения.
Стационарная видеокамера отлёживает полет БПЛА в автоматическом режиме.
Ультразвуковая система используется при полете БПЛА по маршруту над линиями передачи электроэнергии (и вдоль мачт - опор ЛЭП) с целью их диагностики и посадки БПЛА на навигационную станцию для подзарядки, обогрева и хранения, а также навигации вблизи инспектируемых объектов.
Зарядное индукционное устройство необходимо для беспроводной зарядки аккумуляторов БПЛА.
Камеры видеонаблюдения, установленные на БПЛА следят за состоянием элементов городского уличного освещения, а также конструкций и воздушной линии электропередач, отслеживают полет БПЛА в автоматическом режиме, исключая столкновения БПЛА с внезапно возникшими препятствиями.
Пилоны на БПЛА необходимы для подвеса доставляемых грузов, например, модульного диагностического оборудования. Отгрузка и получение груза от отправителя/получателя осуществляется следующим образом. БПЛА двигаясь по автоматическому маршруту входит в зону приёма ультразвукового датчика определения координат с помощью которого осуществляется его посадка на станцию, при чем платформа к которой крепится контейнер с лебедкой на тросе опускается на расстояние несколько большее чем толщина корпусов станции, трос заводится между двумя параллельно расположенными корпусами, и прикасании шасси БПЛА к станции платформа с грузом притягивается и прижимает БПЛА к станции, затем получив сигал от отправителя / получателя (с помощью смартфона), который находится в визуальной видимости (или под станцией). Контейнер с помощью этой же лебедки (при зажатой платформе и БПЛА на станции, опускается до отправителя/получателя (при видеофиксации момента получения и отправки груза и комплексной проверки получателя/отправителя с помощью нескольких способов инструментального и визуального контроля (вплоть до личной ЭЦП). Отправитель/получатель вынимает кладет груз в/из контейнера. Уведомляет транспортного оператора и отправителя груза в получении и времени получения/оправления груза.
Барометрический датчик высоты, установленный на БПЛА, используется для определения высоты БПЛА, и расчета эшелона его полета относительно приведенной барометрической высоты
Гироскоп с тремя степенями свободы, установленный на БПЛА необходим как для обеспечения заданного направления при полете по маршруту вне зависимости от эволюций самого БПЛА по курсу, крену и тангажу, так и для управления БПЛА по данным параметрам.
Подзарядка БПЛА осуществляется на навигационной станции следующим образом:
- с помощью индукционных токов напряжением 12-220v вырабатываемых индукционной катушкой вышеуказанной станции.
- с помощью индукционного модуля, преобразующего электромагнитное поле переменного тока, образующегося вокруг проводов высоковольтных ЛЭП.
Скорость подзарядки БПЛА от навигационной станции не более 5 часов. Время полета БПЛА без подзарядки – не менее 30 мин.
Также возможна подзарядки БПЛА при полете вдоль высоковольтных линий ЛЭП от линий магнитной индукции наводимой высоковольтных проводами ЛЭП, что еще больше увеличивает дальность действия диагностического комплекса, снижает затраты на размещение промежуточных станций подзарядки БПЛА, позволяет использовать систему в более широком диапазоне.
Навигационная станция также содержит систему жесткого автоматического крепления БПЛА для его подзарядки, обогрева, хранения в спящем режиме и в случаях наступления сложных метеоусловий. Ориентация и посадка БПЛА (мультикоптера) на автоматические крепления осуществляется с помощью ультразвуковых датчиков, расположенных на БПЛА и станции (c погрешностью 0,1 метра).
При касании скобообразных шасси БПЛА к определенному месту навигационной станции, шасси БПЛА захватываются электромагнитными зажимами, препятствующими смещению БПЛА со станции даже при сильном боковом ветре, где БПЛА остается до окончания процедуры, зарядки, обогрева или снижения условий СМУ (сложным метеоусловий), препятствующих безопасному продолжению полета БПЛА.
Для исключения падения БПЛА на дорожное покрытие, землю, людей, в случае их повреждения или, например, столкновения, между опорами линии освещения и ЛЭП может быть натянута крупноячеистой сетка, выполненная, например, из полимерного материала шириной 3-5 метров. Сетка может быть использована как основа для вечерней и праздничной иллюминации (дополнительной подсветки улиц, дворов, проездов, декоративная подсветка и т.д.).
Также на навигационных станциях может осуществляться обогрев аккумуляторной батареи БПЛА и самого БПЛА при его хранении на станции и осуществлении полетов в критически низких температурах в районах крайнего севера (от – 40 до -60 град. Цельсия). Система обогрева исключает образование снега и наледи как на самом БПЛА, так и на станции.
Обогрев осуществляется за счет инфракрасного источника тепла, например, обогревательной пластины (по принципу обогревателей ПЛЭН или нихромовых нитей, расположенных в текстолитовом корпусе), имеющей толщину, достаточную для размещения (задвигания) ее в пазы модульного корпуса.
И для обогрева и посадки БПЛА модульный корпус станции размещен обогревающим блоком вверх, а не вниз, при наличии на нем осветительной платы.
Для более быстрого распространения тепла и отвода паров воды от БПЛА (мультикоптера), на навигационной станции закрепленный БПЛА включает двигатели в режиме холостого хода с целью направления теплого воздуха от нагревательного элемента станции на сам БПЛА (снизу - вверх). В дальнейшем направление воздушного потока постоянно меняется, чем обеспечивает более полный обдув БПЛА и его компонентов для очистки от капель воды, инея, снега, льда.
Комплекс позволяет осуществить точный контроль местонахождения и управления БПЛА относительно навигационной станции, расположенных на матах-опорах ЛЭП, при его полете в режиме дистанционной диагностики и посадки на навигационной станции с помощью ультразвука (c точностью 0,1 метра).
Варианты размещения навигационной станции:
- стационарно – непосредственно на вершине мачты – опоры высоковольтной ЛЭП, вблизи с грозозащитным тросом ЛЭП.
- стационарно – непосредственно на двух параллельных высоковольтных проводах ЛЭП.
- стационарно – на крыше трансформаторной подстанции.
- мобильно – на крыше (кузове) транспортного средства.
Крепление навигационной станции, на опорной поверхности может осуществляться различными способами, в том числе:
- с помощью универсального крепёжного устройства, установленного на поверхности модульного корпуса, и надеваемого на трубу (консоль) (фиг.3);
- с помощью самого корпуса квадратного или круглого, надеваемого на трубу (консоль) (фиг.2);
- с помощью венчающей опоры (фиг.5) и пр.
Взаимосвязь между элементами комплекса может осуществляться по беспроводным каналам. Например, связь между отдельными функциональными блоками с блоком управления, установленными на одной навигационной станции, осуществляется по Bluetooth. Связь между навигационной станцией (ее блоками) и БПЛА осуществляется по Wi-Fi, LoRA WAN, GPS-ГЛОНАСС, GSM или другим закодированным цифровым сигналам. Связь между БПЛА и центром управления осуществляется посредством блока управления, расположенного на навигационной станции. Поэтому полет БПЛА в автоматическом режиме ведется по координатам, определяемым с помощью блоков навигационной станции в автоматическом режиме, с навигационной станции приходят и уходят управляющие сигналы с центра управления. Связь осуществляется для «доклада» о местонахождении БПЛА по координатам GPS-ГЛОНАСС, координатам Wi-Fi, LoRA WAN, о маршруте времени и координатах прохода КПМ, ИПМ и прибытия на КПМ, а также для получения задания БПЛА от центра управления для изменения автоматического маршрута полета БПЛА или для его экстренной посадки на станции.
На фиг. 11 представлена схема передачи информации между функциональными блоками и блоком управления навигационной станции и центром управления. В каждой навигационной станции, установленной на опорной поверхности, расположен свой блок управления. Данные собираются или передаются с/на функциональный блок на блок управления по сигналу Bluetooth – это связано с тем что сигнал Bluetooth маломощный и различных функциональных блоков очень много по направлениям (функционалу) в одной географической координате, и одинаковые по назначению функциональные блоки могут иметь различные географические координаты места расположения станций.
Эти данные поступают на блок управления, где они временно хранятся в файлах, в зависимости от своего функционала, с обязательной информацией о географических координатах их сбора.
Далее посредством комплекса серии сигналов Wi-Fi, LoRa WAN, управляющего сигнала (по питающим проводам и др.) эта информация поступает на центральный сервер с привязанными географическими координатами местонахождения каждого сигнала, причем при отправке блок управления обнуляется. Информация поступает от одного блока управления к следующему блоку управления с помощью вышеуказанного комплекса серии сигналов Wi-Fi, LoRa WAN, управляющего сигнала (по питающим проводам и др.).
Вся информация поступает и храниться на центральном сервере с привязкой в зависимости от:
- Функционала (информационной принадлежности) метеостанции отдельно, газоанализаторы отдельно, счетчики отдельно, видеонаблюдение отдельно)
- Географических координат
- Времени сбора
И в зависимости от допуска эта информация размещается на отдельных Веб Сайтах или на отдельных закладках одного Веб Сайта с различными информационными допусками. В некоторых случаях можно совмещать информацию, поступившую с различных функциональных блоков на одном сайте и все это накладывать на карту, например, Гугл карту или Яндекс карту в различных режимах просмотра с различной масштабной сеткой.
На фиг. 12 представлена схема передачи информации между функциональными блоками и навигационной станцией (блоком управления), БПЛА и навигационной станцией, навигационной станцией и центром управления (сервер сбора, обработки и управления данными).
Передача собранной информации о текущем стоянии элементов высоковольтных линий воздушной передачи электроэнергии для последующей обработки, анализа и хранения осуществляется на сервер центра управления.
Центр управления включает в себя сервер (программный комплекс, предназначенный для сбора, хранения, обработки и предоставления на пользовательский уровень комплекса информации широкого спектра с энергообъектов), автоматизированное рабочее место оператора, который в свою очередь с ПК отслеживает, через определенный интернет ресурс (сайт полета БПЛА), местонахождение БПЛА, как в полете, так и на подзарядке по всему протяжению маршрута, а также данные с видеокамер БПЛА, со станций навигации и данные о метео условиях в районе полета БПЛА. При необходимости оператор может вмешаться в процесс работы комплекса. Контролируя полеты групп БПЛА на выделенном ему маршруте полета (зоне ответственности) оператор может взять управление одного из БПЛА под свое личное управление через систему отображения информации на управляющем сайте (в режиме реального времени) так и через видеокамеры, расположенные как стационарно на станции, так и мобильно на самом БПЛА.
Преимуществом автоматического комплекса дистанционной диагностики энергосетевого оборудования с помощью маршрутных полетов БПЛА (мультикоптеров) по линиям передачи электроэнергии ЛЭП является:
1. Возможность более простого согласования полетов БПЛА в городе с государственными контролирующими органами. Если БПЛА зарегистрирован в системе, то он автоматически получает разрешение на полеты вдоль линий передачи электроэнергии ЛЭП.
2. Возможность упорядоченности большого числа полетов БПЛА вдоль линий передачи электроэнергии ЛЭП, позволяет значительно увеличить пропускную способность (трафик), что ускорит процесс дистанционной диагностики с помощью БПЛА.
3. Упорядоченное перемещение БПЛА вдоль ЛЭП, сведет к минимуму аварийные ситуации, связанные с летными пришествиями с участием БПЛА.
4. Низкая себестоимость, простота монтажа и обслуживания комплекса БПЛА для дистанционной диагностики электросетевого оборудования, высокая скорость развертывания системы.
5. Возможность постоянного контроля за полетами всех БПЛА вдоль линий передачи электроэнергии ЛЭП с целью, снижения аварийности, и предотвращения несанкционированных полетов БПЛА
6. Возможность передачи на аутсорсинг систем организации полетов БПЛА в городе (что обеспечит ее быстрое распространение системы БПЛА – высокую коммерциализацию)
7. Высокая безопасность полетов БПЛА в городе для (населения, сооружений наземного, воздушного, водного транспорта и пр.), которая обеспечивается возможностью обеспечения высокой степени контроля полетов БПЛА по маршрутам вдоль линий передачи электроэнергии ЛЭП.
Обоснованность выбора линий осветительных комплексов и высоковольтных линий электропередачи для обеспечения автоматических полетов БПЛА (мультикоптер) вдоль них с целью дистанционной диагностики энергосетевых комплексов.
1. Осветительные комплексы и высоковольтные комплексы, их оборудование и конструктивные элементы требуют постоянного визуального осмотра (технической ревизии), предупреждающие их выход из строя, с чем очень могут помочь БПЛА (мультикоптеры) на начальном этапе своего внедрения.
2. Осветительные комплексы и высоковольтные комплексы постоянно запитаны электроэнергией необходимой для зарядки аккумуляторов БПЛА.
3. В случае применения БПЛА (мультикоптеров) на высоковольтной линии, может быть использован индукционный модуль преобразования индукционных реверсивных токов вокруг высоковольтных проводов, для преобразования их в постоянный (переменный) электрический ток пониженного напряжения для питания навигационной станции БПЛА (мультикоптеров), датчиков модулей и блоков автоматической навигации БПЛА по каналам GPS, GSM, Wi-Fi, ультразвуковым датчикам. А также для питания дополнительных датчиков модулей (блоков) необходимых для высококачественного функционирования осветительных и высоковольтных линиях.
4. Хранение неиспользованных БПЛА (мультикоптеров) на осветительных и высоковольтных линиях, расположенных на мачтах освещения и мачтах – опорах высоковольтных ЛЭП позволяет уменьшить вред вандалов для БПЛА.
5. На осветительных и высоковольтных линиях можно быстро и просто разместить дополнительные функциональные модули (блоки) необходимые для точной и безопасной навигации БПЛА вдоль линий освещения, высоковольтных линий ЛЭП.
6. Линии освещения и высоковольтные линии расположены в местах наиболее удобного расположения для их обслуживания, и функциональных модулей, расположенных на них.
7. Линии освещения и высоковольтные линии имеют уже длительное время опробованную и используемую систему, оборудование, машины и механизмы для безопасного их обслуживания и ремонта, согласованными с нормативными документами.
8. Линии освещения и высоковольтные линии связаны в единую энергосистему, позволяющие использовать их для организации и быстрого развертывания системы автоматических полетов БПЛА (мультикоптеров).
9. Порядок согласования автоматических полетов БПЛА (мультикоптеров), вдоль заданных и неизменных со временем маршрутов полетов вдоль линий освещения и высоковольтных линий ЛЭП, намного проще согласовать с государственными регулирующими и надзорными органами. Автоматические маршруты полетов БПЛА согласовываются один раз на большое количество полетов. Не требуется уведомления РЦ УВД о проведении полетов каждого единичного БПЛА.
10. Контроль санкционированных полетов БПЛА (мультикоптеров) гораздо проще проводить по их заранее запрограммированным автоматическим маршрутам вдоль осветительных и высоковольтных комплексов.
11. Также при разрешенных полетах БПЛА (мультикоптеров) для доставки грузов вдоль линий освещения и высоковольтных линий гораздо проще выявлять и уничтожать (захватывать) несанкционированные полеты БПЛА.
12. В особо ответственных участках полетов БПЛА (мультикоптеров) зону можно ограничивать натяжением крупноячеистой сетки из полимерных нитей. Что позволяет защитить людей, животных, строительные объекты и объекты транспортной инфраструктуры от попадания (падения) на них БПЛА (мультикоптеров) в случае аварии. Данную защитную сетку можно использовать для размещения на ней светодиодной архитектурной праздничной иллюминации.
Заявленное техническое решение позволяет проводить техническую диагностику электросетевого оборудования под рабочим напряжением, обеспечить постоянный поток ключевых диагностических данных о техническом состоянии оборудования в реальном времени, прогнозировать время выхода из строя оборудования на удалённый период времени, что позволит свести убытки электросетевых компаний связанные с выключением линий электропередач на диагностику оборудования к минимуму, существенно уменьшить число аварийных ситуаций при эксплуатации электросетевого оборудования, сократить время на устранение аварийных ситуаций на линиях передачи электроэнергии (ЛЭП).
Функциональные блоки, размещенные на осветительных комплексах (мачтах освещения), высоковольтных комплексах (высоковольтных мачтах, опорах ЛЭП), включающие в себя комплекс датчиков, состоящий из GPS-ГЛОНАС датчиков, Wi-Fi роутеров, ультразвуковых датчиков обеспечивают определение координат и высот полётов БПЛА по автоматическим маршрутам вдоль линий передачи электроэнергии в следующем порядке:
1. С помощью датчиков определения координат GSM-ГЛОНАС (c погрешностью 10-15 метров) обеспечивается первоначальное определение координат БПЛА и вывод его в район действия сигнала Wi-Fi роутера (c погрешностью 3-5 метров).
2. Барометрические датчики, расположенные на навигационных станциях, обеспечивают данными о приведённой минимальной высоте их расположения относительно земли (10-15 метров), мобильный барометрический датчик (расположенный на БПЛА) обеспечивает заданные эшелоны полетов БПЛА, относительно приведенной барометрической высоты (до 5-ти эшелонов с разницей по высотам 10 метров между каждым эшелоном).
3. Выведенный в зону действия Wi-Fi датчиков БПЛА (по данным GPS-ГЛОНАС), поступает под управление системой Wi-Fi и методом триангуляции (определения координат по скорости передачи и возврата радиосигнала по трем и более ближайшим датчикам Wi-Fi) расположенных на навигационных станциях (расстояние между комплексами не более 100 метров). Выводится на ИПМ (исходный пункт маршрута) и далее через ряд ППМ (промежуточный пункт маршрута) на КПМ (конечный пункт маршрута) заданными в автоматическом маршруте БПЛА с погрешностью 0,1-0,5 метров.
4. С помощью данного датчика фиксируется время и координаты выхода БПЛА на ИПМ и далее через ППМ к КПМ.
5. Время и барометрическая высота пролета БПЛА через ИПМ и ППМ фиксируется с помощью барометрических датчиков измерения приведенной высоты.
6. Стационарные видеокамеры также фиксируют время, координаты и высоту полетов БПЛА через ИПМ, ППМ и КПМ
7. Мобильная видеокамера, расположенная на БПЛА обеспечивает безопасный полет БПЛА по маршруту над линиями освещения в части защиты от столкновения БПЛА с препятствиями и другими БПЛА входящими в данную систему. А также выявляет полеты несанкционированных БПЛА в районе своего полета по автоматическому маршруту
8. Оператор, контролирующий полеты групп БПЛА на выделенном ему маршруте полета (зоне ответственности) может взять управление одного БПЛА под свое личное управление через систему отображения информации на управляющем Сайте (в режиме реального времени) так и через видеокамеры, расположенные как на навигационных станциях, так и на самом БПЛА.
9. По мере конца зарядки аккумуляторных батарей (примерно через 30 минут полета при скорости 150 км/ч (на дальности 75 км)) БПЛА автоматически совершает посадку на станцию, расположенную на осветительной мачте, высоковольтном комплексе (мачте-опоре высоковольтных ЛЭП).
Навигационная станция имеет в своем составе базу беспроводной подзарядки, автоматические зажимы крепления БПЛА на станции подзарядки, систему обогрева БПЛА с целью освобождения его от капель воды, минея, снега и льда.
10. При получении сигнала об окончании заряда аккумуляторов на БПЛА, по Wi-Fi сигналу БПЛА (мультикоптер) выводится на станцию, расположенную на осветительной мачте, высоковольтном комплексе (мачте-опоре высоковольтных ЛЭП). Ориентация и посадка БПЛА (мультикоптера) по системам автоматических креплений на станции осуществляется с помощью ультразвуковых датчиков, расположенных на БПЛА и станции (c погрешностью 0,01-0,05 метров).
11. Для подробного дистанционного визуального обследования элементов (с помощью видеокамеры установленной на БПЛА). Минимальное безопасное заданное расстояние до объекта визуального обследования (ревизии) выдерживается автоматически с помощью ультразвуковых датчиков, расположенных на БПЛА. Позволяя оператору БПЛА все своё внимание с управления БПЛА (мультикоптер) перенести на визуальную оценку заданного объекта.
Такие объекты как ветки и листва деревьев, имеющих тенденцию к разрастанию в зоне осветительных комплексов, высоковольтных комплексов также могут контролироваться с помощью ультразвуковых датчиков, расположенных на БПЛА в автоматическом режиме при полете по маршруту над линиями освещения и высоковольтными линиями.
12. В случае наступления режима СМУ (сложных метеоусловий) и иных аварийных ситуаций, автоматически или по приказу оператора одиночный БПЛА или группа БПЛА с помощью ультразвуковых датчиков совершают посадку на станции подзарядки и автоматически прикрепляются к ним электромагнитными зажимами и переходят в «спящий режим» и подзарядку.
13. При отмене режима СМУ по указаниям оператора БПЛА продолжают свои маршруты в заданном направлении и на заданных высотах. При чем, для обеспечения безопасности полетов БПЛА (мультикоптеры) сначала взлетают строго вертикально и занимают заданный эшелон, а затем продолжают свой маршрут в заданном направлении и на заданном эшелоне.
14. В случае прибытия БПЛА на КПМ и совершения им вертикальной посадки все БПЛА находящиеся в районе посадки БПЛА в радиусе 150-300 метров прекращают горизонтальное перемещение и переходят в режим «зависания», до прекращения этим БПЛА вертикального снижения, посадки и закрепления на зарядной станции и закрепления на ней с помощью зажимов или разгрузки груза. В дальнейшем все БПЛА продолжают свои полеты по заданным маршрутам на заданных высотах полёта.
Станции постоянно запитаны электроэнергией, необходимой для зарядки аккумуляторных батарей БПЛА.
Общий порядок работы комплекса при дистанционной диагностике электросетевого оборудования осуществляется следующим образом:
Предварительно собирают навигационную станцию необходимой формы из одного или из нескольких корпусов, путем соединения корпусов друг с другом методом задвигания (при соединении корпусов могут использоваться соединительные элементы и торцевые крышки). Внутрь, по меньшей мере, одного корпуса или на внешнюю его поверхность может устанавливается функциональное оборудование, например, датчики инструментального контроля навигации: блок определения координат GPS-ГЛОНАСС, блок определения координат и управления БПЛА по Wi-Fi сигналам, блок определения координат и управления БПЛА по Li-Fi сигналам, блок определения координат и управления БПЛА по сигналам LoRa WAN, блок метеостанции, блок посадки и крепления БПЛА при хранении его в спящем режиме на ОСН (он же используется как блок приёма и отгрузки груза, размещенного в подвесном контейнере), индукционный блок подзарядки БПЛА, блок обогрева БПЛА, блок предполетной проверки БПЛА, ультразвуковой блок автоматической посадки БПЛА на ОСН и другие блоки, не ограниченные вышеуказанным списком и назначением, а также датчики визуального контроля навигации: видеокамера наблюдения за земной поверхностью и окружающей территорией в ограниченной зоне автоматических полетов БПЛА (антивандальная), видеокамера наблюдения за районом автоматических маршрутов полетов БПЛА (визуальный контроль пролетов БПЛА) и другие блоки, не ограниченные вышеуказанным списком и назначением. Все блоки могут размещаться как в одном, так и в нескольких быстро присоединяемых, автоматически коммутирующих с центром управления (по сигналу Bluetooth, LoRa WAN, инфракрасным волнам и пр.) модульных корпусах навигационной станции.
Собранная навигационная станция монтируется, например, на мачтах - опорах ЛЭП. На станции размещают БПЛА, на котором также могут размещать функциональное оборудование, такое как, датчики инструментального контроля навигации: блок определения координат GPS-ГЛОНАСС, блок определения координат и управления БПЛА по Wi-Fi сигналам, блок определения координат и управления БПЛА по Li-Fi сигналам, блок определения координат и управления БПЛА по сигналам LoRa WAN, блок посадки и крепления БПЛА при хранении его в спящем режиме на станции (он же используется как блок приёма и отгрузки груза, размещенного в подвесном контейнере), индукционный блок подзарядки БПЛА, блок обогрева БПЛА, блок предполетной проверки БПЛА, ультразвуковой блок автоматической посадки БПЛА на станцию, исполнительный блок (для расчета отклонений от ЛЗП (линии заданного пути) и автоматической корректировки маршрута БПЛА по допустимому ЛБУ (линейному боковому уклонению) и времени прохождения ИМП, ППМ, КПМ (Исходного, Промежуточного, Конечного Пунктов Маршрута) в ограниченном и согласованном районе автоматических маршрутов полетов БПЛА и другие блоки, не ограниченные вышеуказанным списком и назначением, а также датчики визуального контроля навигации: видеокамера наблюдения за земной поверхностью и окружающей территорией в ограниченной зоне автоматических полетов БПЛА (антивандальная), видеокамера наблюдения за районом автоматических маршрутов полетов БПЛА (визуальный контроль пролетов БПЛА) и другие блоки, не ограниченные вышеуказанным списком и назначением.
При получении задания на облет для дистанционной диагностики высоковольтных ЛЭП, БПЛА выдвигается в зону осмотра вдоль высоковольтных линий ЛЭП в автоматическом режиме (скорость полета 11 км/ч). Перемещаясь вдоль высоковольтных проводов, находящихся ближе к земле, с помощью радиовысотомера производится поиск точек замыкания на землю (измерение расстояния от высоковольтных проводов до земли или возникших объектов (сооружения, техника, растительность, изменения рельефа и пр.)) Прибыв в зону дистанционной диагностики БПЛА начинает запрограммированное передвижение вдоль объектов ЛЭП, начиная от основания мачт-опор ЛЭП, далее с облетом всех траверз с размещенными на них изоляторами и виброгасителями. Облетев мачту опору траверзы с изоляторами и виброгасителями БПЛА перемещается с следующей мачте-опоре ЛЭП вдоль грозотроса, попутно диагностируя состояния грозотроса и высоковольтных проводов. Собранная информация для хранения, обработки и предоставления на пользовательский уровень поступает на сервер центра управления. Взаимодействие между элементами комплекса осуществляется посредством беспроводной связи.
Повышение эффективности работы комплекса обеспечивается за счет увеличения длительности и дальности полетов БПЛА, за счет обеспечения возможности дозарядки аккумуляторных батарей БПЛА в процессе выполнения полета, а также за счет возможности обогрева и хранения БПЛА, быстроты сбора навигационных станций на светодиодных светильниках линий городского освещения, опорах ЛЭП и столбах уличного освещения, их замены или дополнения.
Основными преимуществами данного комплекса являются:
1. Универсальность – позволяет использовать данную систему в широком спектре применения для любых сфер жизнедеятельности человека связанной с электрификацией и дистанционной диагностикой и управлением электросетевым оборудованием.
2. Мобильность – позволяет быстро развертывать и адаптировать комплекс к любым условиям эксплуатации.
3. Трансформируемость (вариативность) – позволяет быстро и просто изменять (дополнять) комплекс, оставаясь актуальным длительный период времени.
4. Модульность – позволяет использовать модульные корпуса как отдельные самостоятельные единицы, так и в составе единого комплекса. Модульность реализована через:
- быстрое механическое безотвёрточное присоединение модулей корпусов друг к другу под различными положениями в пространстве
- быструю автоматическую интеграцию электронных блоков и модулей в единую информационную систему комплекса
Предлагаемое техническое решение может быть использовано для мониторинга технического состояния городской и междугородней линий освещения, высоковольтных линий передачи электроэнергии.
Использование предложенного комплекса позволяет осуществлять полеты БПЛА на дальние расстояния с дозаправкой в пути на станциях.
Так же с помощью БПЛА совершающих автоматический полет вдоль линий городского освещения и линий передачи электроэнергии можно контролировать полеты несанкционированных БПЛА в городе и за городом, и принимать меры по их устранению (под управлением оператора).
Навигационные станции могут устанавливаться через каждые 50-100 км, что обеспечивает возможность БПЛА осуществлять на них своевременную дозаправку, базироваться при не благоприятных для полетов погодных условиях, а также передавать данные мониторинга на пульт управления оператора. Расположение станций через указанный интервал позволяет охватить всю зону полетов БПЛА, обеспечивая непрерывный контроль за полетом БПЛА.
Заявленный комплекс также позволяет:
- Проводить наиболее полный дистанционный комплексный мониторинг конструкций и элементов ЛЭП непрерывно (плановое и внеплановое) без отключения электроэнергии ЛЭП.
- Сократить количество вспомогательного персонала, обслуживающего диагностический комплекс.
- Увеличить автономность работы и зону покрытия комплекса дистанционной диагностики БПЛА за счет размещения автономных навигационно-зарядных станций на линиях ЛЭП.
- Значительно сократить время на диагностику ЛЭП.
- Более оперативно реагировать на предпосылки по выходу из строя элементов ЛЭП и возникновению внештатных ситуаций.
- Более качественно планировать и корректировать сроки плановых замен элементов конструкций ЛЭП.
- Проводить постоянную комплексную плановую диагностику элементов ЛЭП, которая позволит заменять только необходимые элементы конструкции ЛЭП (с учетом их реального износа), а не все элементы подряд, что значительно сократит средства на эксплуатацию ЛЭП.
- Существенно снизить потери электроэнергии при ее транспортировке от неисправности оборудования и элементов ЛЭП.
- Минимизировать количество возникновения аварийных ситуаций (в том числе из-за возникновения неблагоприятных погодных условий).
- Существенно снизить затраты на плановые технические осмотры и обслуживания электросетей, приводимых как при работающих, так и при отключённых сетях.
- Существенно сократить время на отключения сетей при плановых и экстренных осмотрах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДОСТАВКИ ГРУЗА | 2018 |
|
RU2689643C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности высоковольтных ЛЭП с применением беспилотных летательных аппаратов | 2024 |
|
RU2829914C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности ЛЭП в непрерывном режиме | 2023 |
|
RU2821208C1 |
| СПОСОБ РАБОТЫ АВТОМАТИЧЕСКОГО БЕСПИЛОТНОГО КОМПЛЕКСА ДИАГНОСТИКИ ВЫСОКОВОЛЬТНЫХ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2014 |
|
RU2555585C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния ЛЭП | 2022 |
|
RU2789896C1 |
| Способ обнаружения нефтезагрязнений в донных отложениях водоемов при помощи беспилотных летательных аппаратов | 2020 |
|
RU2748070C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Способ определения пространственных координат и углового положения удаленного объекта | 2018 |
|
RU2681836C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПРИ ДВИЖЕНИИ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2829561C2 |
| Система доставки груза на место проведения горнодобывающим субъектом взрывных работ (варианты) | 2024 |
|
RU2840365C1 |

Автоматический комплекс дистанционной диагностики электросетевого оборудования содержит опорную поверхность с размещенной на ней навигационной станцией с площадкой для приема беспилотного летательного аппарата, центр управления. Навигационная станция содержит модульный корпус, выполненный определенным образом, функциональное оборудование. Площадка для приема выполнена с возможностью беспроводной зарядки, обогрева и хранения беспилотного летательного аппарата. Обеспечивается повышение эффективности дистанционного контроля электросетевого оборудования, упрощение диагностики, монтажа и демонтажа, обслуживания комплекса, возможность использования при любых погодных условиях. 15 з.п. ф-лы, 12 ил.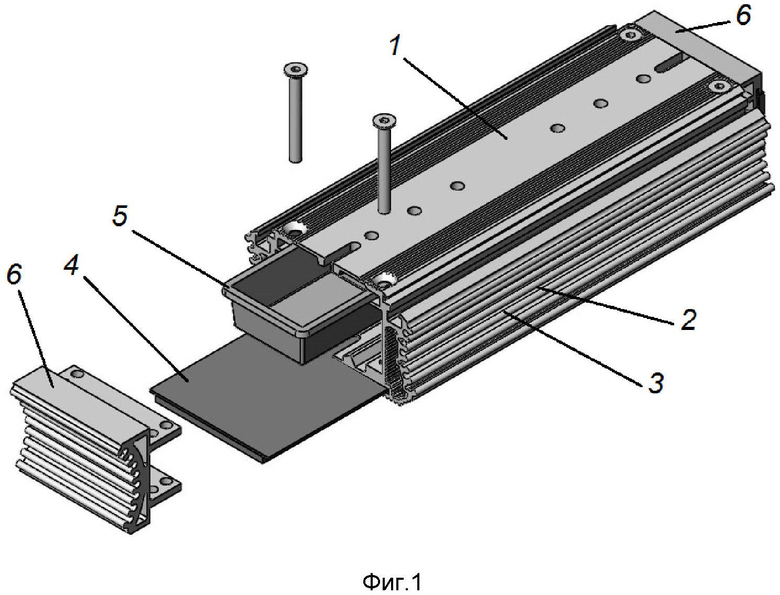
1. Автоматический комплекс дистанционной диагностики электросетевого оборудования, включающий по меньшей мере одну опорную поверхность, размещенную на опорной поверхности навигационную станцию с площадкой для приема по меньшей мере одного беспилотного летательного аппарата, беспилотный летательный аппарат, взаимодействующий по беспроводному каналу связи с указанной площадкой, и центр управления, отличающийся тем, что навигационная станция выполнена из по меньшей мере одного модульного корпуса, на наружной поверхности которого выполнены пазы и выступы, взаимокомплементарные пазам и выступам соединительного элемента или такого же модульного корпуса, при этом наружная поверхность модульного корпуса образует площадку для приема по меньшей мере одного беспилотного летательного аппарата, причем площадка для приема по меньшей мере одного беспилотного летательного аппарата выполнена с возможностью беспроводной зарядки, обогрева и хранения беспилотного летательного аппарата, а по меньшей мере один модульный корпус навигационной станции содержит по меньшей мере одно функциональное оборудование.
2. Комплекс по п. 1, отличающийся тем, что модульный корпус представляет собой замкнутый профиль удлиненной прямоугольной или круглой формы.
3. Комплекс по п. 1, отличающийся тем, что модульный корпус навигационной станции содержит торцевые крышки.
4. Комплекс по п. 3, отличающийся тем, что торцевые крышки выполнены с по меньшей мере одной парой симметричных Г-образных выступов, образованных на наружной поверхности крышки и служащих для крепления платы со светодиодами и рассеивателем.
5. Комплекс по п. 3, отличающийся тем, что торцевые крышки выполнены с по меньшей мере одним набором продольных выступов и пазов, взаимокомплементарным выступам и пазам соединительного элемента или корпуса.
6. Комплекс по п. 1, отличающийся тем, что выступы и пазы соединительного элемента расположены продольно вдоль всей его длины.
7. Комплекс по п. 6, отличающийся тем, что на конце каждого выступа соединительного элемента вдоль всей его длины выполнено шарообразное утолщение, а нижний край каждого паза сформирован в виде шарообразной выемки аналогичной формы, образованной вдоль всей дины паза.
8. Комплекс по п. 1, отличающийся тем, что функциональное оборудование установлено внутри и/или на наружной поверхности модульного корпуса навигационной станции.
9. Комплекс по п. 1, отличающийся тем, что опорная поверхность, на которой размещена навигационная станция, выполнена стационарной или подвижной.
10. Комплекс по п. 1, отличающийся тем, что на навигационной станции и на БПЛА установлены по меньшей мере по одной видеокамере.
11. Комплекс по п. 1, отличающийся тем, что связь между навигационной станцией, БПЛА и центром управления осуществлена через беспроводные каналы связи.
12. Комплекс по п. 1, отличающийся тем, что связь между функциональным оборудованием навигационной станции осуществлена через Bluetooth.
13. Комплекс по п. 1, отличающийся тем, что связь навигационной станции с БПЛА и навигационной станции с центром управления осуществлена через Wi-Fi, или LoRA WAN, или GPS-ГЛОНАСС, или GSM.
14. Комплекс по п. 1, отличающийся тем, что в модульном корпусе навигационной станции установлен инфракрасный источник тепла, обеспечивающий обогрев станции, БПЛА и его аккумуляторов.
15. Комплекс по п. 1, отличающийся тем, что навигационная станция содержит систему жесткого автоматического крепления БПЛА для его подзарядки, обогрева, хранения в спящем режиме и в случаях наступления сложных метеоусловий.
16. Комплекс по п. 15, отличающийся тем, что система жесткого автоматического крепления БПЛА содержит ультразвуковые датчики, расположенные на БПЛА и навигационной станции.
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ КОМПЛЕКС ДИАГНОСТИКИ ПРОТЯЖЕННЫХ ОБЪЕКТОВ, ОСНАЩЕННЫХ СОБСТВЕННОЙ ИНФОРМАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2343438C1 |
| СПОСОБ ДИАГНОСТИКИ ВЫСОКОВОЛЬТНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2010 |
|
RU2421746C1 |
| US 20170113815 A1, 27.04.2017 | |||
| ТЕМПЕРАТУРНЫЙ ПЕРМЕАМЕТР | 0 |
|
SU168376A1 |
| US 20170217323 A1, 03.08.2017. | |||

