Адаптивный мобильный пространственный робот-манипулятор для обслуживания ЛЭП и способ обслуживания ЛЭП посредством адаптивного мобильного пространственного робота-манипулятора
Изобретение относится к области электроэнергетики и может быть использовано при монтаже воздушных линий электропередач (ЛЭП), их обслуживании и ремонте, а именно для перемещения предметов, кабелей и проводов вдоль опор и проводов воздушных линий электропередач независимо от их пространственной ориентации и поперечных размеров, включая удаление с проводов льда, а также их сращивания в месте обрыва.
Известны метод и аппарат для удаления всех типов льда и снега с провода ЛЭП (US 6518497 B1. Allaire М. - А, LaForte J.-L. Method and apparatus for breaking ice accretions on an aerial cable. 11.12.2003. МПК H02G 7/16). Корпус аппарат жестко крепится к несущим элементам конструкции опоры ЛЭП или к местам подвески проводов. При этом вращающийся конец выходного вала аппарата охватывает металлический рукав запрессованный на проводе ЛЭП в месте установки аппарата и жестко фиксируется с ним. Аппарат включает средства радиосвязи с блоком управления, электрически связанным со средствами удаления льда и снега, выполненными в виде электрического моторредуктора, выходной вал которого соосно расположен с продольной осью провода ЛЭП. При вращении выходного вала редуктора, запрессованный на проводе ЛЭП металлический рукав поворачиватся вместе с проводом ЛЭП вокруг его оси. Возникающие при этом напряжения разрушают ледяное или снежное покрытие провода. Показано, что, например, для удаления льда со стандартного провода ЛЭП диаметром 11 мм и длиной 200 м потребуется закрутить его относительно продольной оси на 100-200 оборотов.
Указанное устройство имеет следующие недостатки:
 при критической толщине покрытия и, как следствие, массе провода между опорами ЛЭП, напряжение от осевого закручивания провода может вызвать его обрыв;
при критической толщине покрытия и, как следствие, массе провода между опорами ЛЭП, напряжение от осевого закручивания провода может вызвать его обрыв;
 осевое закручивание провода на сотни оборотов в сочетании с низкой температурой окружающего воздуха может привести к повреждению, как отдельных его жил, так и провода в целом, вплоть до обрыва;
осевое закручивание провода на сотни оборотов в сочетании с низкой температурой окружающего воздуха может привести к повреждению, как отдельных его жил, так и провода в целом, вплоть до обрыва;
 приведенный метод удаления льда в силу своей стационарности требует либо установки аппаратов на проводах для всех пролетов ЛЭП в регионе, либо монтажа-демонтажа одного аппарата последовательно на всех пролетах ЛЭП; при этом на каждом из проводов в каждом из пролетов между опорами ЛЭП требуется наличие опрессованного на проводе металлического рукава; в результате требуется большое количество аппаратов с организацией их обслуживания или, в случае с одним аппаратом, существенно возрастает трудоемкость проведения операций по очистке проводов ЛЭП;
приведенный метод удаления льда в силу своей стационарности требует либо установки аппаратов на проводах для всех пролетов ЛЭП в регионе, либо монтажа-демонтажа одного аппарата последовательно на всех пролетах ЛЭП; при этом на каждом из проводов в каждом из пролетов между опорами ЛЭП требуется наличие опрессованного на проводе металлического рукава; в результате требуется большое количество аппаратов с организацией их обслуживания или, в случае с одним аппаратом, существенно возрастает трудоемкость проведения операций по очистке проводов ЛЭП;
 в случае наличия разнотолщинности слоя ледяного или снежного покрытия по длине провода, которая может составлять 200 м, покрытие способно разрушаться не полностью, а участками; в результате крутильная жесткость освободившихся от ледяного покрытия участков будет существенно ниже крутильной жесткости участка с сохранившимся покрытием и осевое закручивание провода будет происходить лишь очищенных участков провода до тех пор, пока крутильные жесткости очищенных и неочищенных участков не выравниваются; при этом либо потребуется количество оборотов осевого закручивания провода больше максимального расчетного значения (N>200), что может привести к повреждению провода или его обрыву, либо провод будет очищен не полностью и толщина покрытия таких участков будет увеличиваться вместе с их крутильной жесткостью;
в случае наличия разнотолщинности слоя ледяного или снежного покрытия по длине провода, которая может составлять 200 м, покрытие способно разрушаться не полностью, а участками; в результате крутильная жесткость освободившихся от ледяного покрытия участков будет существенно ниже крутильной жесткости участка с сохранившимся покрытием и осевое закручивание провода будет происходить лишь очищенных участков провода до тех пор, пока крутильные жесткости очищенных и неочищенных участков не выравниваются; при этом либо потребуется количество оборотов осевого закручивания провода больше максимального расчетного значения (N>200), что может привести к повреждению провода или его обрыву, либо провод будет очищен не полностью и толщина покрытия таких участков будет увеличиваться вместе с их крутильной жесткостью;
 на участке ЛЭП с оборванным или обесточенным проводом аппарат не работоспособен;
на участке ЛЭП с оборванным или обесточенным проводом аппарат не работоспособен;
 аппарат неспособно проводить диагностику провода и толщины ледяного покрытия по всей его длине между опорами ЛЭП.
аппарат неспособно проводить диагностику провода и толщины ледяного покрытия по всей его длине между опорами ЛЭП.
Известно мобильное устройство для удаления льда с провода линии электропередач (ЛЭП), включающее автономное средство передвижения вдоль провода с возможностью фиксации, систему управления, средства радиосвязи и средства для удаления льда с провода в виде шнеков. (Козин В.М., Соловьев В.А., Сухоруков С.И., Орлов Д.А. Устройство для удаления льда с провода линии электропередач. Патент РФ на изобретение №2449443. МПК H02G 7/16. Опубл. в БИ, №12, 2012).
Указанное устройство имеет следующие недостатки:
 устройство не обеспечивает ударных воздействий на ледяное покрытие провода и в случае плотного ледяного покрытия может произойти заклинивание шнеков средства для удаления льда и остановка устройства;
устройство не обеспечивает ударных воздействий на ледяное покрытие провода и в случае плотного ледяного покрытия может произойти заклинивание шнеков средства для удаления льда и остановка устройства;
 устройство способно удалять с проводов ледяное покрытие небольшой толщины, в то время как толщина покрытия может достигать 300 мм и более (Каганов В.И. Борьба с гололедом в линиях электропередачи с помощью электромагнитной волны // ЭЛЕКТРО, №5, 2010, с. 41-45); адаптация устройства к большим толщинам покрытия неизбежно приведет к существенному увеличению его габаритно-весовых характеристик и повышенному потреблению энергии, что может стать непреодолимым препятствием к его практической реализации;
устройство способно удалять с проводов ледяное покрытие небольшой толщины, в то время как толщина покрытия может достигать 300 мм и более (Каганов В.И. Борьба с гололедом в линиях электропередачи с помощью электромагнитной волны // ЭЛЕКТРО, №5, 2010, с. 41-45); адаптация устройства к большим толщинам покрытия неизбежно приведет к существенному увеличению его габаритно-весовых характеристик и повышенному потреблению энергии, что может стать непреодолимым препятствием к его практической реализации;
 устройство не имеет возможности перемещения по обесточенному, а также по свисающему оборванному или провисшему под тяжестью ледяного покрытия проводу, даже при небольшом угле возвышения к горизонту;
устройство не имеет возможности перемещения по обесточенному, а также по свисающему оборванному или провисшему под тяжестью ледяного покрытия проводу, даже при небольшом угле возвышения к горизонту;
 устройство не является адаптивным и предназначено для перемещения только по проводам одного и того же сечения;
устройство не является адаптивным и предназначено для перемещения только по проводам одного и того же сечения;
 устройство не имеет возможности преодоления на проводе мест соединения проводов, а также неспособно перемещаться по мачтовым опорам ЛЭП;
устройство не имеет возможности преодоления на проводе мест соединения проводов, а также неспособно перемещаться по мачтовым опорам ЛЭП;
 устройство не позволяет осуществлять контроль геометрии поперечного сечения провода и покрытия и его твердости;
устройство не позволяет осуществлять контроль геометрии поперечного сечения провода и покрытия и его твердости;
 в случае неконтролируемого сброса ледяного покрытия с провода, неизбежно возникнет так называемая «пляска провода» способная привести к контакту со смежными проводами ЛЭП также находящимися под напряжением, что может привести к аварийному отключению подачи электроэнергии или к повреждению провода, вплоть до его обрыва;
в случае неконтролируемого сброса ледяного покрытия с провода, неизбежно возникнет так называемая «пляска провода» способная привести к контакту со смежными проводами ЛЭП также находящимися под напряжением, что может привести к аварийному отключению подачи электроэнергии или к повреждению провода, вплоть до его обрыва;
 в случае установки на проводе цельного устройства требуется выполнение сложного технологического процесса по его монтажу-демонтажу на проводе, включающий разъединение провода в месте установки устройства; в случае исключения разъединения провода требуется разъемное исполнение таких элементов устройства как корпус, источник питания в виде тороидального трансформатора, линейный двигатель, неподвижная и подвижная части поворотного механизма; в результате существенно усложняется конструкция и вес устройства и технологический процесс его монтажа-демонтажа на проводе; при этом в обоих случаях требуется очистка провода от ледяного покрытия в месте установки устройства, что также требует дополнительных трудозатрат;
в случае установки на проводе цельного устройства требуется выполнение сложного технологического процесса по его монтажу-демонтажу на проводе, включающий разъединение провода в месте установки устройства; в случае исключения разъединения провода требуется разъемное исполнение таких элементов устройства как корпус, источник питания в виде тороидального трансформатора, линейный двигатель, неподвижная и подвижная части поворотного механизма; в результате существенно усложняется конструкция и вес устройства и технологический процесс его монтажа-демонтажа на проводе; при этом в обоих случаях требуется очистка провода от ледяного покрытия в месте установки устройства, что также требует дополнительных трудозатрат;
устройство не контролирует силу сцепления средств его передвижения с проводом; в результате возможно его самопроизвольное перемещение под уклон в случае если тяговое усилие линейного двигателя окажется меньше величины осевой составляющей силы тяжести, действующей на устройство.
Техническим результатом предлагаемых адаптивного мобильного пространственного робота-манипулятора для обслуживания ЛЭП и способа обслуживания ЛЭП посредством адаптивного мобильного пространственного робота-манипулятора является упрощение конструкции, снижение массовых характеристик, удаление ледяного покрытия с провода независимо от его геометрических размеров и степени провисания провода, а также в случае его обесточивания или обрыва, измерение геометрических размеров охватываемого профиля обледенелого провода, и очищенного провода, возможность перемещения устройства через места соединения провода, а также при изменении геометрических размеров охватываемого профиля обледенелого провода при перемещении устройства вдоль провода, контроль ударно-обжимных радиальных и продольных воздействий, а также линейных перемещений устройства вдоль провода, повышение надежности, исключение соударения и замыкания смежных проводов в случае неконтролируемого сброса с провода ледяного покрытия и последующей его «пляски», также повышение эффективности и расширение манипуляционных и функциональных возможностей.
Это достигается тем, что в адаптивном мобильном пространственном роботе-манипуляторе для обслуживания ЛЭП, содержащем средство передвижения вдоль провода с возможностью фиксации, систему управления и средства для удаления льда с провода, робот-манипулятор, характеризующийся тем, что содержит пространственную структуру в виде октаэдрального модуля в исходном положении, выполненном с возможностью перемещения вдоль провода и фиксации и удаления льда с провода, а его ребра выполнены в виде стержней, концы которых шарнирно соединены в вершинах октаэдрального модуля, при этом стержни снабжены линейными приводами с осевыми датчиками силы, относительного перемещения и относительной скорости, причем стержни выполнены с возможностью изменения их длины по управляющим командам на линейные приводы от системы управления, при этом стержни тыльной и фронтальной граней снабжены радиальными упорами с датчиками температуры и изолированными друг от друга электрическими контактами с возможностью образования адаптивных схватов робота-манипулятора, а вершины октаэдрального модуля снабжены совмещенными датчиками пространственного положения и ускорений, выполненными в виде трехосных блоков гироскопов-акселерометров, при этом линейные приводы, датчики силы, температуры, относительного перемещения и относительной скорости и совмещенные датчики пространственного положения и ускорений электрически соединены через аналого-цифровые преобразователи с системой управления, выполненной с возможностью оперативного контроля и управления в реальном режиме времени, при этом радиальные упоры стержней тыльной и фронтальной граней выполнены в виде двузвенных ударно-обжимных устройств, наружные концы которых шарнирно соединены с концами стержней и вершинами октаэдрального модуля общими цилиндрическими шарнирами, а внутренние концы соединены между собой цилиндрическими шарнирами и снабжены сменяемыми ударно-обжимными элементами. При этом каждая из вершин октаэдрального модуля может быть выполнена с возможностью установки дополнительных мониторинговых и манипуляционных устройств.
Это достигается тем, что в способе обслуживания ЛЭП посредством адаптивного мобильного пространственного робота-манипулятора, заключающемся в том, что его устанавливают на провод ЛЭП с ледяным покрытием, дистанционно управляют удалением покрытия и перемещают робот-манипулятор вдоль провода, перед установкой робота-манипулятора в систему управления вводят его массу, геометрические параметры провода и ледяного покрытия, межопорную длину провода и его допустимую нагрузку, после этого определяют безопасное место и через фронтальную и тыльную грани устанавливают робот-манипулятор на проводе и осуществляют очистку провода от ледяного покрытия, при которой уменьшают длины стержней фронтальной и тыльной граней до момента установления контакта ударно-обжимных устройств с обледенелой поверхностью провода и производят фиксацию на ней тыльной грани и фронтальной граней с заданными усилиями, которые определяют по показаниям осевых датчиков силы, после этого линейные приводы отключают и вычисляют координаты вершин граней относительно базовой системы координат, затем по команде от системы управления уменьшают длины стержней тыльной грани и увеличивают усилие обжатия до полного разрушения ледяного покрытия, которое соответствует равенству диаметра обжатия диаметру провода и запоминают усилие разрушающего обжатия, а линейные приводы отключают и определяют толщину ледяного слоя как разность между обжатым диаметром и диаметром провода, при неполном удалении ледяного покрытия по команде от системы управления изменяют длины стержней боковых граней, при этом осуществляют осевой поворот или наклон тыльной грани относительно фронтальной грани и процесс обжатия повторяют, при этом, в случае недостаточного усилия обжатия, по команде от системы управления осуществляют знакопеременное изменение длин стержней тыльной грани и с помощью двузвенных ударно-обжимных устройств организуют ударно-вибрационное воздействие на ледяное покрытие с заданной частотой, при этом при необходимости обеспечивают одиночное, попарное или тройное ударно-вибрационное воздействие, причем для одиночного и попарного воздействия при необходимости изменяют последовательности их воздействий, после полного разрушения ледяного покрытия тыльную грань перемещают на величину заданного шага к фронтальной грани и процесс повторяют, после достижения минимальных длин стержней боковых граней тыльную грань фиксируют путем обжатия провода, а фронтальную грань перемещают на новый участок и фиксируют, и процесс удаления льда повторяют, причем при необходимости обеспечивают обжимное или поочередное ударно-вибрационное воздействия одновременно тыльной и фронтальной гранями.
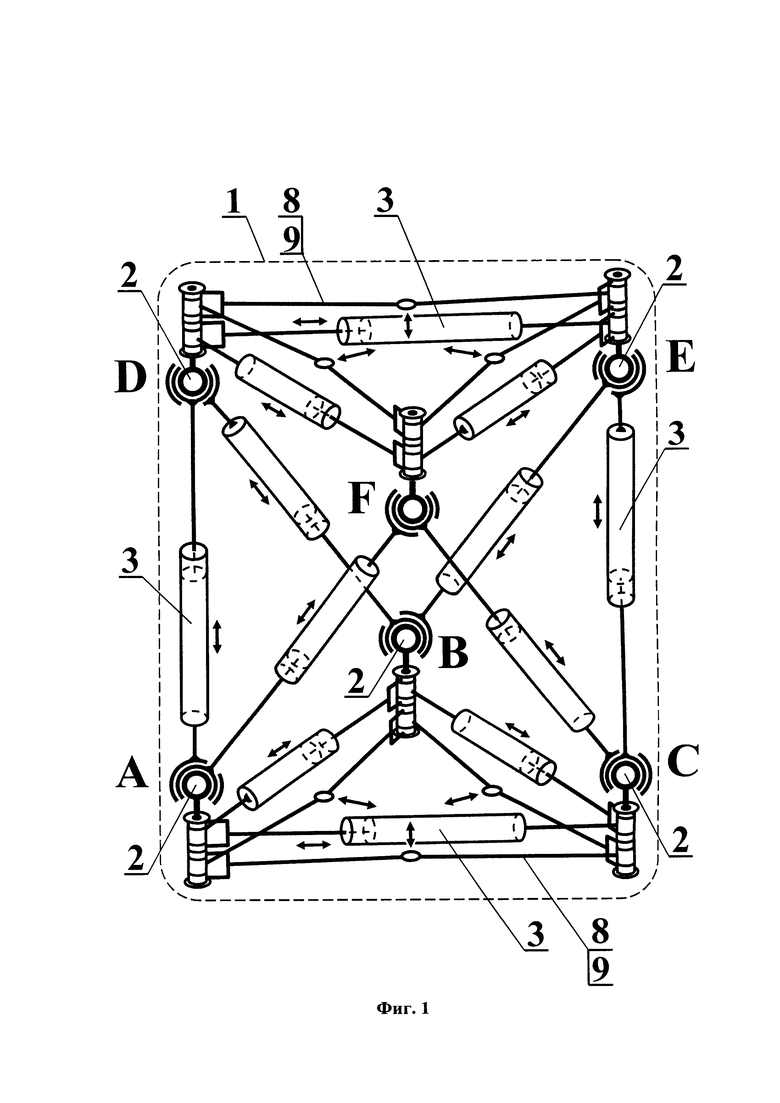
На фиг. 1 представлено схематическое изображение октаэдрального модуля ABCDEF адаптивного мобильного пространственного робота-манипулятора. Стрелками показаны направления возможных изменений длин ребер линейных приводов и направления перемещений внутренних цилиндрических шарниров двузвенных ударно-обжимных устройств.
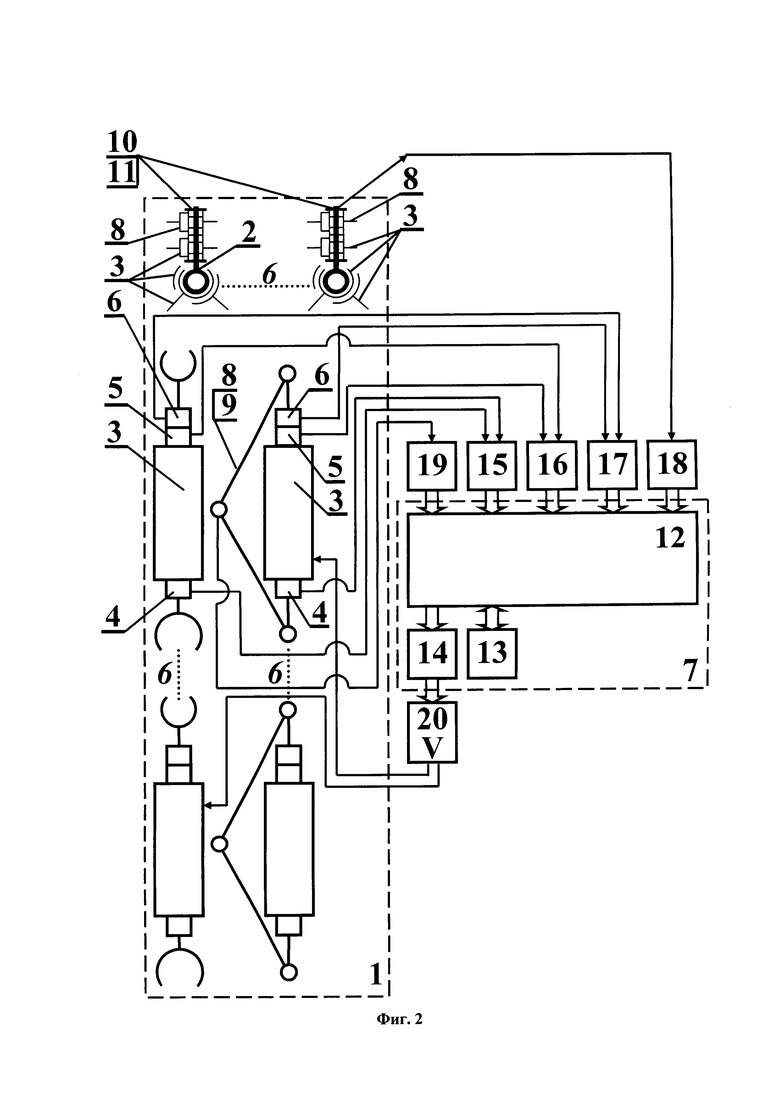
На фиг. 2 представлена структурная схема адаптивного мобильного пространственного робота-манипулятора.
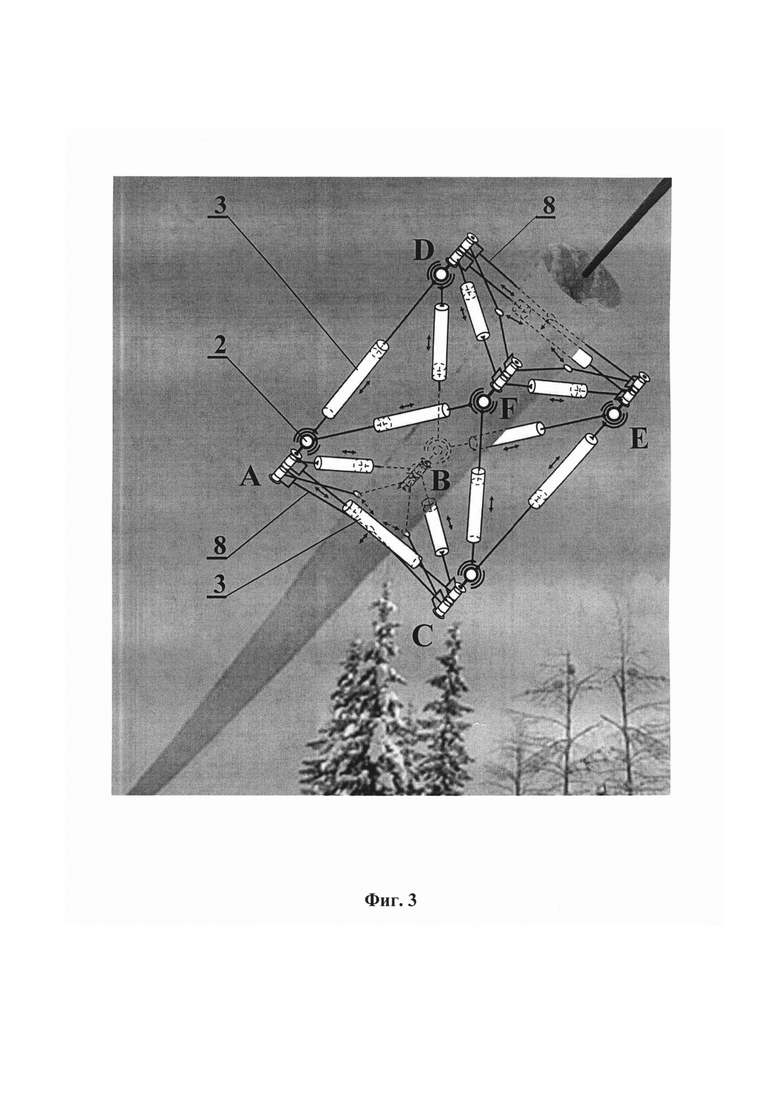
На фиг. 3 показана схема установки фронтальной DEF и тыльной ABC граней адаптивного мобильного пространственного робота-манипулятора перпендикулярно обледенелому проводу ЛЭП.
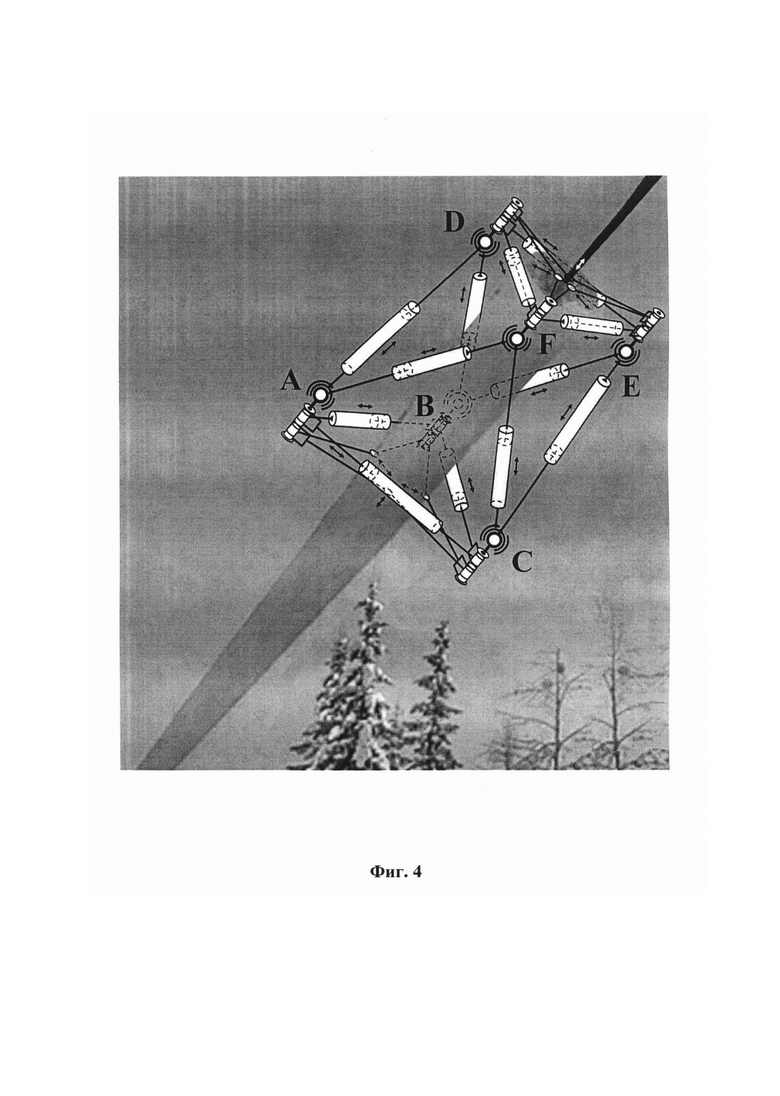
На фиг. 4 показана схема удаления ледяного покрытия с провода ЛЭП фронтальной гранью DEF адаптивного мобильного пространственного робота-манипулятора.
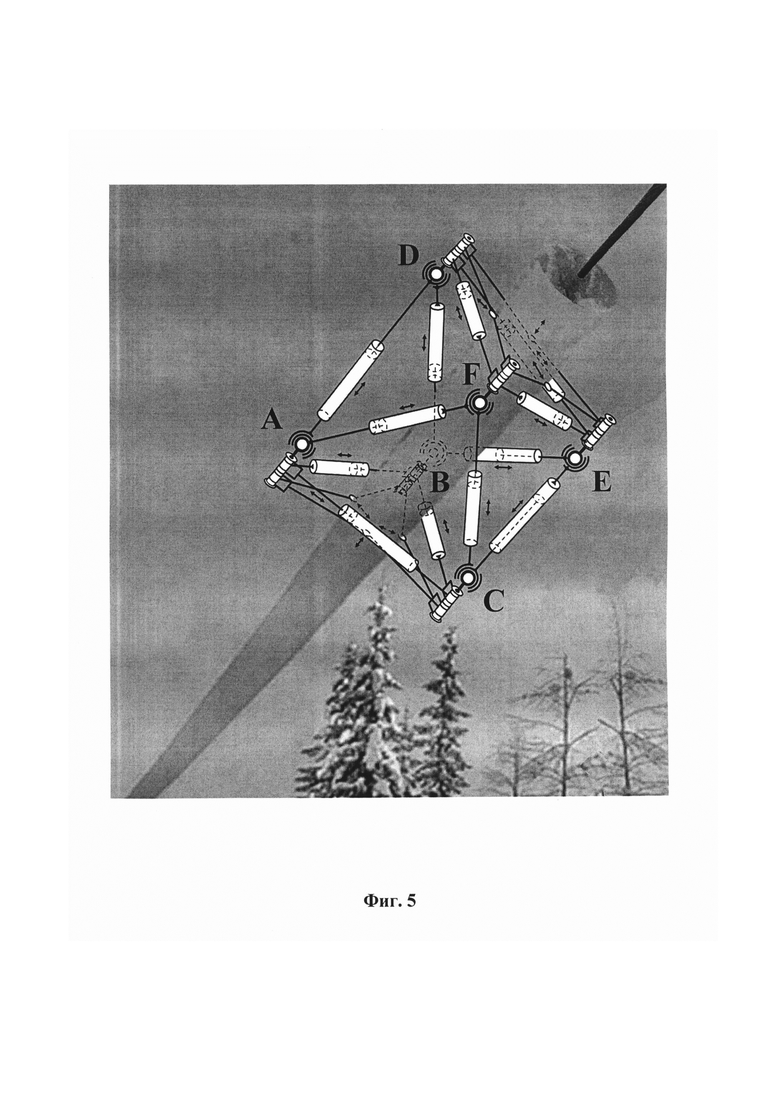
На фиг. 5 показана схема установки фронтальной грани DEF адаптивного мобильного пространственного робота-манипулятора под острым углом к обледенелому проводу ЛЭП.
Адаптивный мобильный пространственный робот-манипулятор для обслуживания ЛЭП, выполнен в виде октаэдрального модуля ABCDEF 1 в исходном положении, ребра которого выполнены в виде стержней, концы которых шарнирно соединены в вершинах 2 октаэдрального модуля 1 (фиг. 1). При этом, тыльная грань ABC октаэдрального модуля 1 расположена с противоположной стороны от направления его движения, а параллельная ей фронтальная грань DEF расположена со стороны направления движения. Тыльная и фронтальная грани выполнены с возможностью соединения через них с подобными модулями. Каждый из стержней снабжен линейным приводом 3 с осевыми датчиками силы 4, относительного перемещения, 5 и относительной скорости 6 и выполнен с возможностью изменения своей длины по управляющим командам на его линейный привод 3 от системы управления (СУ) 7 (фиг. 2). Концы линейных приводов 3 всех стержней боковых граней октаэдрального модуля 1 соединены с помощью сферических или эквивалентных им шарниров в шести вершинах 2 октаэдрального модуля 1 по два в каждой. Концы линейных приводов 3 тыльной и фронтальной граней октаэдрального модуля 1 и внешние концы соответствующих радиальных упоров в виде двузвенных ударно-обжимных устройств 8 с датчиками температуры 9 и изолированными электрическим контактами, установленными на контактных поверхностях (на фигурах условно не показаны) соединены с помощью цилиндрических шарниров в вершинах 2. Внутренние концы двухзвенных ударно-обжимных устройств 8 соединены цилиндрическими шарнирами с образованием адаптивных схватов тыльной и фронтальной граней (фиг. 1-5) и снабжены сменяемыми ударно-обжимными элементами (на фигурах условно не показаны). При необходимости каждая из вершин 2 может быть выполнена с возможностью установки дополнительных мониторинговых и манипуляционных устройств (на фигурах условно не показаны).
Вершины 2 октаэдрального модуля 1 снабжены совмещенными датчиками пространственного положения 10 и ускорений 11, которые выполнены в виде трехосных блоков гироскопов-акселерометров и служат для оперативного контроля пространственного положения каждой из вершин 2 и виброускорений вдоль каждой из осей стержней с линейными приводами 3.
СУ 7 включает нейрокомпьютер 12, программно алгоритмическое обеспечение 13 и цифро-аналоговые преобразователи (ЦАП) 14. Входы СУ 7 через шины данных аналого-цифровых преобразователей (АЦП) подключены соответственно к выходам АЦП 15 датчиков силы 4, АЦП 16 датчиков относительного перемещения 5, АЦП 17 датчиков относительной скорости 6; АЦП 18 совмещенных датчиков пространственного положения и ускорений 10 и 11; АЦП 19 датчиков температуры 9, а выходы СУ 7 через шины выходных данных подключены к соответствующим входам программно-алгоритмического обеспечения 13 и последовательно соединенных цифроаналоговых преобразователей (ЦАП) 14, усилителей мощности 20 и исполнительных органов (линейных приводов 3). При этом СУ 7 и система энергопитания (на фигурах условно не показана) могут быть выполнены как автономного, так и дистанционного исполнения.
Адаптивный мобильный пространственный робот-манипулятор, выполненный в виде октаэдрального модуля 1 (в исходном положении), работает следующим образом.
Октаэдральный модуль 1 является базовым элементом и позволяет объединяться через тыльную и фронтальную грани с подобными модулями с образованием двух и многомодульных структур. Для этого вершины 2 выполняют с двумя сферическими или эквивалентными им шарнирами на концах и перед объединением удаляют одну из стыкуемых граней вместе с ее вершинами 2, а образовавшиеся свободные концы боковых граней шарнирно подсоединяют к свободным концам вершин 2.
Внутренние цилиндрические шарниры двузвенных ударно-обжимных устройств 8 с датчиками температуры 9 и электрически изолированными контактами (на фигурах условно не показаны) служат для передачи сжимающих усилий и вибрационных воздействий от вершин 2 к наружной охватываемой поверхности обледенелого или очищенного провода ЛЭП. Оперативный контроль передаваемых усилий от линейных приводов 3 к вершинам 2 и, как следствие, к контактируемым поверхностям осуществляют с помощью осевых датчиков силы 4. Датчики температуры 9 позволяют осуществлять контроль температуры на поверхности обледенелого или очищенного провода ЛЭП, а изолированные друг от друга электрические контакты (на фигурах условно не показаны) - измерять электрическое сопротивление и разность потенциалов между точками контакта.
Во избежание обрыва обледенелого провода ЛЭП от действия веса октаэдрального модуля 1, дополнительной ветровой нагрузки и ударно-вибрационных воздействий на обледенелый провод ЛЭП перед установкой октаэдрального модуля 1 в систему управления 7 вводят его массу, парусность, скорость ветра, геометрические параметры провода и ледяного, межопорную длину провода и его допустимую нагрузку. После обработки введенных данных, система управления 7 определяет безопасное место установки октаэдрального модуля 1. В случае предельных значений нагрузок осуществляют частичную очистку провода вручную и после выдачи разрешения от системы управления осуществляют установку октаэдрального модуля на обледенелый провод ЛЭП. При этом производят расстыковку одного из концов трех смежных стержней тыльной, фронтальной и боковой граней, а также связанных с ними двузвенных ударно-обжимных устройств 8 с последующим восстановлением соединений после установки октаэдрального модуля 1 на обледенелом проводе. При установке октаэдрального модуля 1 на оборванный конец обледенелого провода ЛЭП, проведение указанных выше операций не требуется. После установки октаэдрального модуля 1 на обледенелый провод с помощью линейных приводов 3 и системы управления 7 осуществляют уменьшение длин ребер тыльной и фронтальной граней. В результате происходят радиальные перемещения внутренних шарниров двузвенных ударно-обжимных устройств к поверхности обледенелого или очищенного провода ЛЭП и последующее его обжатие и фиксация с требуемым усилием, определяемым по показаниям осевых датчиков силы 4. По показаниям датчиков относительного перемещения 5 устанавливаются и запоминаются пространственные координаты вершин 2 относительно базовой системы координат. Управление исполнительными органами октаэдрального модуля 1 (линейными приводами 3) осуществляется по управляющим командам от системы управления 7, которые формируются по показаниям осевых датчиков силы 4, относительного перемещения 5 и относительной скорости 6, совмещенных датчиков пространственного положения и ускорений 10, 11. При этом сигналы от датчиков поступают на входы АЦП 15, 16, 17 и 18 соответственно и через шину данных в нейрокомпьютер 12 системы управления 7. После обработки в реальном масштабе времени данных с использованием соответствующего программно-алгоритмического обеспечения 13, формируют управляющие команды, которые через ЦАП 14 и усилители мощности 20 поступают на исполнительные органы (линейные привода 3) и октаэдральный модуль 1 изменяет свою геометрическую форму (трансформируется).
Способ эксплуатации адаптивного мобильного пространственного робота-манипулятора при обслуживании и ремонте ЛЭП реализуется следующим образом. Управление адаптивным мобильным пространственным роботом-манипулятором осуществляется согласованным изменением длин стержней (ребер октаэдрального модуля ABCDEF 1), обеспечивающих необходимое перемещение в пространстве вершин 2 октаэдральногоо модуля 1 и внутренних шарниров двузвенных ударно-обжимных устройств 8. При этом по показаниям осевых датчиков относительного перемещения 4 линейных приводов 3, выполненных, например, в виде линейных позиционеров, осуществляют контроль длин всех стержней октаэдрального модуля 1 и, как следствие, расстояний между центрами сферических шарниров вершин 2 и определяют относительно базовой системы координат координаты вершин 2 и точек контакта двузвенных ударно-обжимных устройств 8 тыльной (фронтальной) грани, связанной с подвижной системой координат. Относительно подвижной системы координат определяют текущие координаты вершин 2 и точек контакта двузвенных ударно-обжимных устройств 8 фронтальной (тыльной грани) грани. По показаниям датчиков пространственного положения 10, выполненных, например, в виде трехосных блоков гироскопов-акселерометров, судят о пространственных угловых перемещениях вершин 2. Геометрическая неизменяемость октаэдрального модуля 1 позволяет определять пространственные координаты вершин 2 по измеренным длинам всех стержней и управлять их перемещениями аналогично организации пространственных перемещений 1-координатного манипулятора (Колискор А.Ш. Разработка и исследование промышленных роботов на основе /-координат // Станки и инструмент, 1982. №12. С. 21-24). При этом по координатам точек контакта в обжатом состоянии двузвенных ударно-обжимных устройств 8 судят о форме и размерах обледенелого покрытия провода и степени очистки самого провода ЛЭП. В свою очередь показания датчиков пространственного положения 10 позволяют повысить точность данных измерений.
Эксплуатация адаптивного мобильного пространственного робота-манипулятора включает в себя очистку провода ЛЭП от ледяного, перемещение вдоль одиночных опор и оборванных или натянутых проводов ЛЭП грузов к месту проведения монтажно-ремонтных и профилактических работ. Особенно это актуально, в случае расположения смежных опор ЛЭП на противоположных сторонах препятствия естественного (реки, горы, ущелья) или искусственного (здания, и другие инженерно-технические сооружения) происхождения. Также возможно протягивание провода или троса вдоль смежного натянутого провода ЛЭП.
В каждом из приведенных выше режимов способ реализуется следующим образом:
 1-ый режим - организация сдавливающих воздействий на ледяное покрытие провода ЛЭП. После установки октаэдрального модуля 1 (ABCDEF) на частично очищенный или неочищенный от ледяного покрытия провод ЛЭП (фиг. 3), его фиксируют с помощью двузвенных ударно-обжимных устройств 8 фронтальной и тыльной граней с заданными усилиями, контролируемыми осевыми датчиками силы 4. Затем по показаниям датчиков относительного перемещения 5 и пространственного положения 10 определяют расстояния между центрами вершин 2 и вводят в систему управления 7, которая определяет и запоминает относительно базовой системы координат координаты вершин 2 и точек контакта двузвенных ударно-обжимных устройств 8 фронтальной и тыльной граней. По измеренным координатам и известном значении диаметра провода судят о толщине и форме поперечного сечения ледяного покрытия. По показаниям датчиков температуры 9 контролируют температуру контактируемой поверхности. После этого с помощью двузвенных ударно-обжимных устройств 8 фронтальной (тыльной) грани осуществляют обжатие ледяного покрытия. При этом от системы управления 7 подается команда на линейные привода 3 стержней фронтальной (тыльной) и расстояния между вершинами 2 грани уменьшается до тех пор, пока координаты точек контакта двузвенных ударно-обжимных устройств 8 обжимающей грани не окажутся на поверхности провода (фиг. 4), т.е. в положении, когда ледяное покрытие будет разрушено. При необходимости проверку полноты разрушения ледяного покрытия можно осуществить, поворачивая обжимающую грань относительно противоположной путем согласованного изменения длин стержней боковых граней октаэдрального модуля 1. При полном разрушении поворот грани должен происходить без сопротивления. В случае неполного разрушения ледяного покрытия, от системы управления 7 подается команда на обратный ход линейных приводов 3 стержней обжимающей грани и расстояния между вершинами 2 грани увеличивается до тех пор, пока координаты точек контакта двузвенных ударно-обжимных устройств 8 не окажутся за пределами габаритов ледяного покрытия. После этого обжимающую грань (например, фронтальную) поворачивают относительно зафиксированной грани (например, тыльной) и операцию обжатия повторяют. При этом угол обжимающей грани относительно провода может быть, при необходимости, изменен от первоначального (фиг. 5). Также изменением длин стержней боковых граней октаэдрального модуля может быть организовано параллельное смещение фронтальной грани относительно тыльной. Возникающие при этом изгибные деформации провода будут способствовать растрескиванию и обрушению ледяного покрытия. После полной очистки участка провода от ледяного покрытия, расстояния между вершинами 2 обжимающей грани увеличивают до момента выхода точек контакта двузвенных ударно-обжимных устройств 8 за пределы габаритов ледяного покрытия и путем уменьшения длин стержней боковых граней октаэдрального модуля 1 обжимающую грань перемещают вдоль обледенелого провода на новый участок и операцию по удалению ледяного покрытия с провода ЛЭП повторяют. После достижения минимальных длин стержней боковых граней октаэдрального модуля, увеличивают расстояния между вершинами 2 зафиксированной грани и после ее расфиксации увеличивают длины стержней боковых граней и перемещенную на новый участок грань вновь фиксируют на ледяном покрытии и операцию по очистке провода ЛЭП повторяют.
1-ый режим - организация сдавливающих воздействий на ледяное покрытие провода ЛЭП. После установки октаэдрального модуля 1 (ABCDEF) на частично очищенный или неочищенный от ледяного покрытия провод ЛЭП (фиг. 3), его фиксируют с помощью двузвенных ударно-обжимных устройств 8 фронтальной и тыльной граней с заданными усилиями, контролируемыми осевыми датчиками силы 4. Затем по показаниям датчиков относительного перемещения 5 и пространственного положения 10 определяют расстояния между центрами вершин 2 и вводят в систему управления 7, которая определяет и запоминает относительно базовой системы координат координаты вершин 2 и точек контакта двузвенных ударно-обжимных устройств 8 фронтальной и тыльной граней. По измеренным координатам и известном значении диаметра провода судят о толщине и форме поперечного сечения ледяного покрытия. По показаниям датчиков температуры 9 контролируют температуру контактируемой поверхности. После этого с помощью двузвенных ударно-обжимных устройств 8 фронтальной (тыльной) грани осуществляют обжатие ледяного покрытия. При этом от системы управления 7 подается команда на линейные привода 3 стержней фронтальной (тыльной) и расстояния между вершинами 2 грани уменьшается до тех пор, пока координаты точек контакта двузвенных ударно-обжимных устройств 8 обжимающей грани не окажутся на поверхности провода (фиг. 4), т.е. в положении, когда ледяное покрытие будет разрушено. При необходимости проверку полноты разрушения ледяного покрытия можно осуществить, поворачивая обжимающую грань относительно противоположной путем согласованного изменения длин стержней боковых граней октаэдрального модуля 1. При полном разрушении поворот грани должен происходить без сопротивления. В случае неполного разрушения ледяного покрытия, от системы управления 7 подается команда на обратный ход линейных приводов 3 стержней обжимающей грани и расстояния между вершинами 2 грани увеличивается до тех пор, пока координаты точек контакта двузвенных ударно-обжимных устройств 8 не окажутся за пределами габаритов ледяного покрытия. После этого обжимающую грань (например, фронтальную) поворачивают относительно зафиксированной грани (например, тыльной) и операцию обжатия повторяют. При этом угол обжимающей грани относительно провода может быть, при необходимости, изменен от первоначального (фиг. 5). Также изменением длин стержней боковых граней октаэдрального модуля может быть организовано параллельное смещение фронтальной грани относительно тыльной. Возникающие при этом изгибные деформации провода будут способствовать растрескиванию и обрушению ледяного покрытия. После полной очистки участка провода от ледяного покрытия, расстояния между вершинами 2 обжимающей грани увеличивают до момента выхода точек контакта двузвенных ударно-обжимных устройств 8 за пределы габаритов ледяного покрытия и путем уменьшения длин стержней боковых граней октаэдрального модуля 1 обжимающую грань перемещают вдоль обледенелого провода на новый участок и операцию по удалению ледяного покрытия с провода ЛЭП повторяют. После достижения минимальных длин стержней боковых граней октаэдрального модуля, увеличивают расстояния между вершинами 2 зафиксированной грани и после ее расфиксации увеличивают длины стержней боковых граней и перемещенную на новый участок грань вновь фиксируют на ледяном покрытии и операцию по очистке провода ЛЭП повторяют.
 2-ой режим - случай, когда развиваемых линейными приводами 3 максимальных усилий оказывается недостаточно для разрушения ледяного покрытия. В этом случае по командам от системы управления 7 на линейные привода 3 фронтальной грани осуществляют попеременное увеличение и уменьшение длин стержней с заданной амплитудой и частотой. При этом возникают ударно-вибрационные воздействия, способствующие разрушению и удалению ледяного покрытия с провода. Амплитудно-частотные характеристики ударно-вибрационных воздействий контролируют по показаниям осевых датчиков силы 4, относительного перемещения 5, относительной скорости 6 и совмещенных датчиков пространственного положения и ускорений 10, 11. В процессе организации ударно-вибрационных воздействий фронтальную грань, как и в первом режиме, при необходимости поворачивают относительно тыльной грани и изменяют угол между их плоскостями.
2-ой режим - случай, когда развиваемых линейными приводами 3 максимальных усилий оказывается недостаточно для разрушения ледяного покрытия. В этом случае по командам от системы управления 7 на линейные привода 3 фронтальной грани осуществляют попеременное увеличение и уменьшение длин стержней с заданной амплитудой и частотой. При этом возникают ударно-вибрационные воздействия, способствующие разрушению и удалению ледяного покрытия с провода. Амплитудно-частотные характеристики ударно-вибрационных воздействий контролируют по показаниям осевых датчиков силы 4, относительного перемещения 5, относительной скорости 6 и совмещенных датчиков пространственного положения и ускорений 10, 11. В процессе организации ударно-вибрационных воздействий фронтальную грань, как и в первом режиме, при необходимости поворачивают относительно тыльной грани и изменяют угол между их плоскостями.
3-й режим - перемещение октаэдрального модуля 1 вдоль одиночных опор, натянутых и оборванных проводов ЛЭП при проведении монтажных и ремонтно-профилактических работ. В этом режиме алгоритмы перемещения октаэдрального модуля 1 идентичны и включают следующие этапы: Установка октаэдрального модуля 1 на опору или провод (исходное положение, этап 0) с зазором между точками контакта двузвенных ударно-обжимных устройств 8 и контактируемой поверхностью. При этом производят расстыковку одного из концов трех смежных стержней тыльной, фронтальной и боковой граней, а также связанных с ними двузвенных ударно-обжимных устройств 8 с последующим восстановлением соединений. При установке октаэдрального модуля 1 на оборванный конец обледенелого провода ЛЭП, проведение указанных выше операций не требуется. После этого уменьшают длины стержней тыльной грани до момента ее надежной фиксации на поверхности опоры или провода (этап 1). При этом создаваемая суммарная сила трения между точками контакта двузвенных ударно-обжимных устройств 8 и поверхностью опоры или провода должна быть выше равнодействующей внешних сил противодействия перемещению, например, силы тяжести октаэдрального модуля 1 и перемещаемого груза, ветровая нагрузка, сила трения (в случае не вертикального перемещения октаэдрального модуля 1) и др. Затем максимально увеличивают длины стержней боковых граней и, после остановки соответствующих им линейных приводов 3 (этап 2), уменьшают длины стержней фронтальной грани до момента ее надежной фиксации на поверхности опоры или провода (этап 3). Далее увеличивают длины стержней тыльной грани до момента образования гарантированного зазором между точками контакта двузвенных ударно-обжимных устройств 8 и контактируемой поверхностью опоры или провода, позволяющего осуществлять беспрепятственное перемещение тыльной грани вдоль опоры или провода (этап 4). Затем уменьшают длины стержней боковых граней до минимальной величины и, после остановки соответствующих им линейных приводов 3 (этап 5), уменьшают длины стержней тыльной грани до момента ее надежной фиксации на поверхности опоры или провода (этап 6). Далее увеличивают длины стержней фронтальной грани до момента образования гарантированного зазором между точками контакта двузвенных ударно-обжимных устройств 8 и контактируемой поверхностью опоры или провода (этап 1) и процесс перемещения октаэдрального модуля 1 (этапы 1-6) повторяют требуемое количество раз.
 4-й режим - стягивание концов проводов. В этом случае с помощью линейных приводов 3 максимально увеличивают длины стержней боковых граней, устанавливают октаэдральный модуль 1 на стягиваемые концы проводов и уменьшают длины стержней фронтальной и тыльной граней до момента надежной фиксации с концами проводов точек контакта соответствующих двузвенных ударно-обжимных устройств 8. Остановку линейных приводов осуществляют по показаниям осевых датчиков силы 4 и относительного перемещения 5. После этого с помощью линейных приводов 3 уменьшают длины стержней боковых граней до момента требуемого взаимного расположения концов проводов, например, встык или внахлест. Их положение контролируют по показаниям датчиков относительного перемещения 5 стержней боковых граней или визуально. При этом по показаниям осевых датчиков силы 4 боковых граней контролируют также усилие стягивания концов проводов.
4-й режим - стягивание концов проводов. В этом случае с помощью линейных приводов 3 максимально увеличивают длины стержней боковых граней, устанавливают октаэдральный модуль 1 на стягиваемые концы проводов и уменьшают длины стержней фронтальной и тыльной граней до момента надежной фиксации с концами проводов точек контакта соответствующих двузвенных ударно-обжимных устройств 8. Остановку линейных приводов осуществляют по показаниям осевых датчиков силы 4 и относительного перемещения 5. После этого с помощью линейных приводов 3 уменьшают длины стержней боковых граней до момента требуемого взаимного расположения концов проводов, например, встык или внахлест. Их положение контролируют по показаниям датчиков относительного перемещения 5 стержней боковых граней или визуально. При этом по показаниям осевых датчиков силы 4 боковых граней контролируют также усилие стягивания концов проводов.
Во всех режимах при необходимости осуществляется контроль температуры контактируемой поверхности и электрическое сопротивление покрытия провода.
Применение в составе системы управления 7 нейрокомпьютера 12 с соответствующим программно-алгоритмическим обеспечением 13 позволяет организовать работу в приведенных режимах в масштабе реального времени.
Приведенные адаптивный мобильный пространственный робот-манипулятор и способ организации движений при обслуживании и ремонте линий электропередач могут быть реализованы на базе имеющихся на сегодняшний день разработок и функционирующих устройств. Так, известны «Адаптивный мобильный пространственный робот-манипулятор и способ организации движений и контроля физико-механических свойств и геометрической формы контактируемой поверхности и траектории перемещения с его помощью» (Патент РФ на изобретение №2424893. МПК B25J 5/00, 13/08. Опубл. в БИ, №20, 2011). В описании патента представлены сведения о возможностях организации различных операций с помощью адаптивного мобильного пространственного робота-манипулятора, выполненного на основе октаэдрального модуля.
Сведения о возможности реализации совмещенных датчиков пространственного положения и ускорений, представляющих миниатюрные трехосные блоки гироскопов-акселерометров, выполненных, например, в виде микромеханических вибрационных гироскопов-акселерометров, представлены в описаниях реализованных техническиого решения «Микромеханический вибрационный гироскоп-акселерометр» (Патент РФ на изобретение №2162229. МПК G01P 15/08, G01C 19/56. Опубл. в БИ, №2, 2001).
В качестве линейных приводов могут быть использованы широко применяемые в машиностроении электромеханические, гидравлические и пневматические линейные приводы. В качестве приведенных в описании устройства датчиков силы, относительной скорости, относительного перемещения, температуры, а также шарнирных соединений линейных приводов с вершинами октаэдрального модуля могут быть применены типовые датчики и узлы, широко известные в машиностроении и робототехнике.
Предлагаемое изобретение может быть использовано не только при обслуживании ЛЭП, но и при проведении монтажных ремонтно-восстановительных, диагностических и профилактических комплексных работ, проводимых при их строительстве и эксплуатации. Особенно актуально его применение в местах, труднодоступных для техники и обслуживающего персонала. Таких как горные ущелья, реки, заснеженная или заболоченная местность, горные перевалы, места природных и техногенных аварий и катастроф и другие подобные участки местности. Также предлагаемое изобретение может быть использовано для проведения автономных работ, а при подключении системы управления 7 к сети Интернет может быть организовано on-line связь устройства и оператора, находящегося на безопасном расстоянии от ЛЭП. При этом через систему спутниковой связи и навигации, например ГЛОНАСС, возможно точное определение местоположение адаптивного мобильного пространственного робота-манипулятора в режиме реального времени.
Использование данного изобретения позволит автоматизировать и механизировать процесс проведения работ связанных со строительством и эксплуатацией ЛЭП. Сократить время, затрачиваемое на очистку проводов ЛЭП от ледяного покрытия и их восстановление в местах обрыва провода. Применение нескольких подобных устройств в программном режиме позволит расширить зону обслуживания и количество проводов ЛЭП одним оператором.
После установки октаэдрального модуля 1 на проводе стержни его ребер при соответствующей их изоляции от обжатого провода ЛЭП служат предохранительным каркасом, препятствующим его соприкосновению с соседними проводами при ветровом воздействии или в результате «пляски» провода после обрушения ледяного покрова. В результате исключается возможность возникновения аварийной ситуации по этой причине и повышается безопасность обслуживающего персонала.
Изобретение относится к области электроэнергетики и может быть использовано при монтаже воздушных линий электропередач, их обслуживании и ремонте, а именно для перемещения предметов, кабелей и проводов вдоль опор и проводов воздушных линий электропередач независимо от их пространственной ориентации и поперечных размеров, включая удаление с проводов льда и снега. Изобретение направлено на упрощение конструкции, снижение массовых характеристик, получение возможности измерения радиальных сжимающих усилий и геометрических размеров охватываемого профиля обледенелого и очищенного проводов, повышение надежности, а также повышение эффективности и расширение манипуляционных и функциональных возможностей. Манипулятор представляет собой модульную конструкцию и имеет возможность пространственного наращивания. 2 н. и 1 з.п. ф-лы, 5 ил.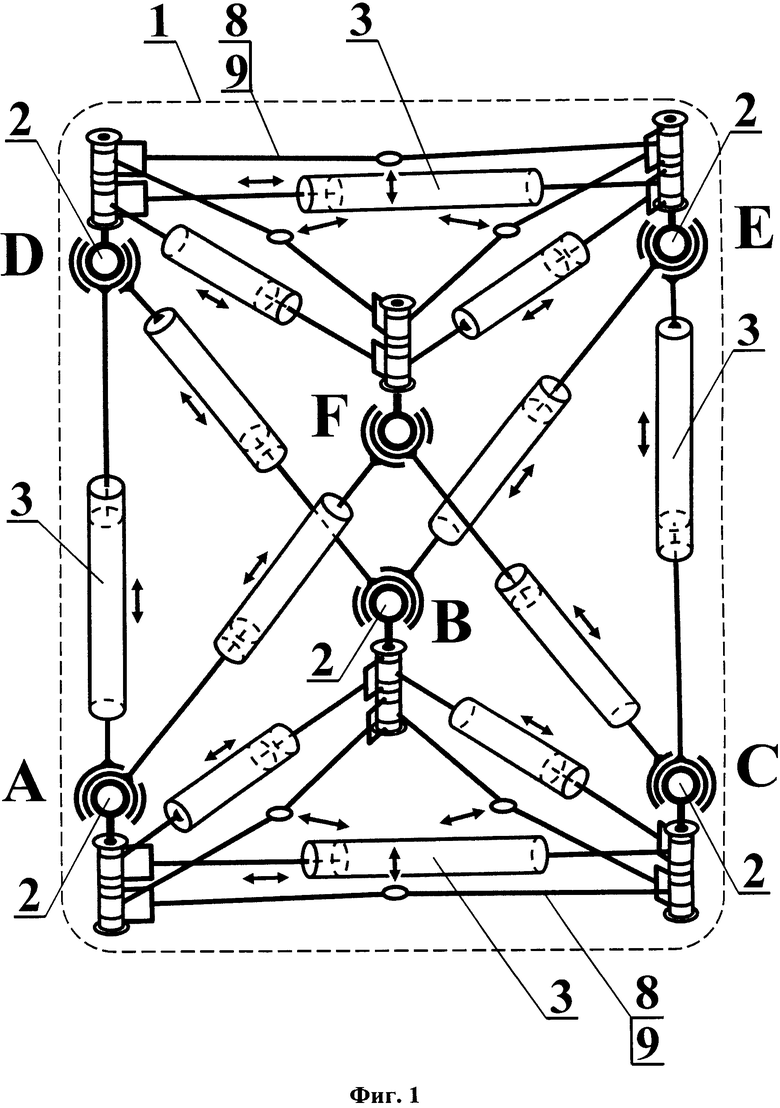
1. Адаптивный мобильный пространственный робот-манипулятор для обслуживания ЛЭП, характеризующийся тем, что он содержит систему управления и пространственную структуру в виде октаэдрального модуля в исходном положении, выполненном с возможностью перемещения вдоль провода и фиксации и удаления льда с провода, а его ребра выполнены в виде стержней, концы которых шарнирно соединены в вершинах октаэдрального модуля, при этом стержни снабжены линейными приводами с осевыми датчиками силы, относительного перемещения и относительной скорости, причем стержни выполнены с возможностью изменения их длины по управляющим командам на линейные приводы от системы управления, при этом стержни тыльной и фронтальной граней снабжены радиальными упорами с датчиками температуры и изолированными друг от друга электрическими контактами с возможностью образования адаптивных схватов робота-манипулятора, а вершины октаэдрального модуля снабжены совмещенными датчиками пространственного положения и ускорений, выполненными в виде трехосных блоков гироскопов-акселерометров, при этом линейные приводы, датчики силы, температуры, относительного перемещения и относительной скорости и совмещенные датчики пространственного положения и ускорений электрически соединены через аналого-цифровые преобразователи с системой управления, выполненной с возможностью оперативного контроля и управления в реальном режиме времени, при этом радиальные упоры стержней тыльной и фронтальной граней выполнены в виде двузвенных ударно-обжимных устройств, наружные концы которых шарнирно соединены с концами стержней и вершинами октаэдрального модуля общими цилиндрическими шарнирами, а внутренние концы соединены между собой цилиндрическими шарнирами и снабжены сменяемыми ударно-обжимными элементами.
2. Робот-манипулятор по п. 1, отличающийся тем, что каждая из вершин октаэдрального модуля выполнена с возможностью установки дополнительных мониторинговых и манипуляционных устройств.
3. Способ обслуживания ЛЭП посредством адаптивного мобильного пространственного робота-манипулятора по п. 1, заключающийся в том, что робот-манипулятор устанавливают на провод ЛЭП с ледяным покрытием, дистанционно управляют удалением покрытия и перемещают робот-манипулятор вдоль провода, при этом перед установкой робота-манипулятора в систему управления вводят его массу, геометрические параметры провода и ледяного покрытия, межопорную длину провода и его допустимую нагрузку, после этого определяют безопасное место и через фронтальную и тыльную грани устанавливают робот-манипулятор на проводе и осуществляют очистку провода от ледяного покрытия, при которой уменьшают длины стержней фронтальной и тыльной граней до момента установления контакта ударно-обжимных устройств с обледенелой поверхностью провода и производят фиксацию на ней тыльной грани и фронтальной граней с заданными усилиями, которые определяют по показаниям осевых датчиков силы, после этого линейные приводы отключают и вычисляют координаты вершин граней относительно базовой системы координат, затем по команде от системы управления уменьшают длины стержней тыльной грани и увеличивают усилие обжатия до полного разрушения ледяного покрытия, которое соответствует равенству диаметра обжатия диаметру провода и запоминают усилие разрушающего обжатия, а линейные приводы отключают и определяют толщину ледяного слоя как разность между обжатым диаметром и диаметром провода, при неполном удалении ледяного покрытия по команде от системы управления изменяют длины стержней боковых граней, при этом осуществляют осевой поворот или наклон тыльной грани относительно фронтальной грани и процесс обжатия повторяют, при этом, в случае недостаточного усилия обжатия, по команде от системы управления осуществляют знакопеременное изменение длин стержней тыльной грани и с помощью двузвенных ударно-обжимных устройств организуют ударно-вибрационное воздействие на ледяное покрытие с заданной частотой, при этом при необходимости обеспечивают одиночное, попарное или тройное ударно-вибрационное воздействие, причем для одиночного и попарного воздействия при необходимости изменяют последовательности их воздействий, после полного разрушения ледяного покрытия тыльную грань перемещают на величину заданного шага к фронтальной грани и процесс повторяют, после достижения минимальных длин стержней боковых граней тыльную грань фиксируют путем обжатия провода, а фронтальную грань перемещают на новый участок и фиксируют, и процесс удаления льда повторяют, причем при необходимости обеспечивают обжимное или поочередное ударно-вибрационное воздействия одновременно тыльной и фронтальной гранями.
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ ЛЬДА С ПРОВОДА ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 2011 |
|
RU2449443C1 |
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ ЛЬДА С ПРОВОДА ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 2011 |
|
RU2470434C1 |
| Прибор для поднятия петель на трикотажных изделиях | 1949 |
|
SU91230A1 |
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ ГОЛОЛЕДА С ПРОВОДА ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 2013 |
|
RU2529528C1 |
| CN 201726090 U, 26.01.2011 | |||
| US 6518497 B1, 11.02.2003. | |||

