Изобретение относится к области вооружения и военной техники, в частности к области использования беспилотных летательных аппаратов в военных целях.
Известен прицельный комплекс боевого беспилотного летательного аппарата Х-45, основное бортовое радио-оптико-электронное оборудование которого включает радиолокационную станцию с фазированной антенной решеткой, ИК-станцию переднего обзора, видеокамеры, аппаратуру радиоэлектронной разведки, связи, навигации и опознавания, систему управления оружием. В состав применяемого вооружения включены управляемые авиационные бомбы серии JDAM, противотанковые управляемые ракеты "Хеллфайр" с полуактивной лазерной или активной радиолокационной головкой самонаведения, управляемые боеприпасы LOCAAS с активной лазерной головкой самонаведения [1].
Недостатком данного прицельного комплекса является то, что при применении управляемых бомб, ракет или боеприпасов с полуактивной лазерной или активной радиолокационной головками самонаведения уничтожается и составная часть системы прицеливания, т.е. сложные и дорогостоящие полуактивные лазерные или активные радиолокационные головки самонаведения.
Наиболее близким по технической сущности и достигаемому результату и выбранным за прототип является прицельный комплекс боевого беспилотного летательного аппарата Х-47, основное бортовое радио-оптико-электронное оборудование которого включает радиолокационную станцию с фазированной антенной решеткой, ИК-станцию переднего обзора, видеокамеры, аппаратуру радиоэлектронной разведки, связи, навигации и опознавания, станцию раннего радиолокационного предупреждения и систему управления оружием. В состав применяемого вооружения включены управляемые авиационные бомбы GBU-32, JDAM-82, противотанковые управляемые ракеты "Хеллфайр" с полуактивной лазерной или активной радиолокационной головками самонаведения, управляемые боеприпасы LOCAAS с активной лазерной головкой самонаведения [2].
Недостатком прототипа также является то, что при применении управляемых бомб, ракет или боеприпасов с полуактивной лазерной или активной радиолокационной головками самонаведения уничтожается и составная часть системы прицеливания, т.е. сложные и дорогостоящие полуактивные лазерные или активные радиолокационные головки самонаведения. Кроме того, боеприпасы с головками самонаведения реагируют на различные "ловушки", например тепловые.
Техническим результатом изобретения является создание для боевого беспилотного летательного аппарата системы прицеливания для оружия, использующего боеприпасы неуправляемого типа, по точности попадания в цель сравнимой с точностью попадания в цель боеприпасов с головками самонаведения.
Технический результат изобретения достигается тем, что прицельный комплекс боевого беспилотного летательного аппарата в составе бортового радио-оптико-электронного оборудования включает радиолокационную станцию с фазированной решеткой, радиостанцию связи с наземным командным пунктом, оптико-электронную систему в видимом и ИК-диапазонах волн, блок питания и высотомер.
Согласно изобретению бортовое радио-оптико-электронное оборудование дополнительно включает центральный вычислительный блок, блок обработки видеоинформации и формирования команд управления, первый усилитель мощности и второй усилитель мощности. Оптико-электронная система включает телевизионный и тепловизионный каналы, двухкоординатное поворотное устройство и систему стабилизации линии визирования.
Первый, второй, третий, четвертый, пятый и шестой входы центрального вычислительного блока электрически соединены соответственно с электрическим выходом радиолокационной станции, выходом высотомера, выходом системы стабилизации линии визирования, выходом телевизионного сигнала оптико-электронной системы, первым выходом блока обработки видеоинформации и формирования команд управления и электрическим выходом радиостанции связи.
Первый, второй, третий, четвертый, пятый и шестой выходы центрального вычислительного блока электрически соединены соответственно с электрическим входом радиолокационной станции, входом управления оптико-электронной системы, первым входом блока обработки видеоинформации и формирования команд управления, входом приводов пуска боеприпасов, первым электрическим входом радиостанции связи и первым входом первого усилителя мощности. Второй и третий входы блока обработки видеоинформации и формирования команд управления электрически соединены соответственно с выходом телевизионного сигнала оптико-электронной системы и выходом двухкоординатного поворотного устройства оптико-электронной системы. Второй, третий и четвертый выходы блока обработки видеоинформации и формирования команд управления электрически соединены соответственно со вторым электрическим входом радиостанции связи, вторым входом первого усилителя мощности и входом второго усилителя мощности. Выходы первого и второго усилителей мощности электрически соединены соответственно со входом приводов рулей управления беспилотным летательным аппаратом и входом двухкоординатного поворотного устройства оптико-электронной системы.
Телевизионный канал оптико-электронной системы может быть выполнен с возможностью формирования сигналов узкого и широкого полей зрения.
Тепловизионный канал оптико-электронной системы может быть выполнен с возможностью формирования сигналов узкого и широкого полей зрения.
Радиолокационная станция с фазированной решеткой может быть выполнена с возможностью работы как в режиме реального луча, так и в режиме синтезированной апертуры.
Система стабилизации линии визирования оптико-злектронной системы может быть выполнена прямой в виде гироскопической платформы.
Система стабилизации линии визирования оптико-злектронной системы может быть выполнена косвенной.
Достижение технического результата обеспечивается использованием всей совокупности существенных признаков присущих изобретению.
Изобретение иллюстрируется чертежами, где
на фиг.1 изображена электрическая схема прицельного комплекса боевого беспилотного летательного аппарата и электрическая схема радиоэлектронного оборудования командного пункта,
на фиг.2 изображен боевой беспилотный летательный аппарат в режиме подлета к зоне поиска цели и в режиме поиска цели,
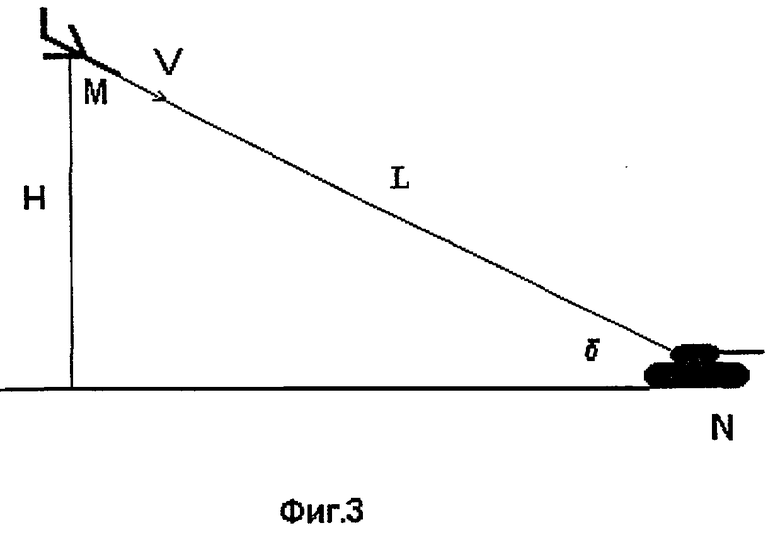
на фиг.3 изображен боевой беспилотный летательный аппарат в режиме атаки.
Пример выполнения прицельного комплекса боевого беспилотного летательного аппарата.
Прицельный комплекс боевого беспилотного летательного аппарата включает радиолокационную станцию с фазированной решеткой 1 и оптико-электронную систему 2, включающую телевизионный и тепловизионный каналы, двухкоординатное поворотное устройство 3 и систему стабилизации линии визирования, выполненную в виде гиростабилизированной платформы 4.
Телевизионный и тепловизионный каналы, оптико-электронная системы 2 и двухкоординатное поворотное устройство 3 установлены на гиростабилизированной платформе 4.
Кроме того, прицельный комплекс содержит центральный вычислительный блок 5, блок обработки видеоинформации и формирования команд управления 6, высотомер 7, первый усилитель мощности 8, второй усилитель мощности 9, приводы рулей боевого беспилотного летательного аппарата 10, приводы пуска боеприпасов 11 и блок питания 12. С наземным командным пунктом боевой беспилотный летательный аппарат осуществляет связь с помощью радиостанции связи 13. Боевой беспилотный летательный аппарат имеет также на своем борту оружие (не показано), использующее боеприпасы неуправляемого типа.
Радиоэлектронное оборудование наземного командного пункта содержит радиостанцию связи командного пункта 14, вычислитель командного пункта 15, формирователь команд управления командного пункта 16, джойстик 17, усилитель мощности командного пункта 18, видеомонитор 19 и источник питания командного пункта 20.
Первый, второй, третий, четвертый, пятый и шестой входы центрального вычислительного блока 5 электрически соединены соответственно с электрическим выходом радиолокационной станции 1, выходом высотомера 7, выходом гиростабилизированной платформы 4, выходом телевизионного сигнала оптико-электронной системы 2, первым выходом блока обработки видеоинформации и формирования команд управления 6 и электрическим выходом радиостанции связи 13.
Первый, второй, третий, четвертый, пятый и шестой выходы центральноого вычислительного блока 5 электрически соединены соответственно с электрическим входом радиолокационной станции 1, входом управления оптико-электронной системы 2, первым входом блока обработки видеоинформации и формирования команд управления 6, входом приводов пуска боеприпасов 11, первым электрическим входом радиостанции связи 13 и первым входом первого усилителя мощности 8.
Второй и третий входы блока обработки видеоинформации и формирования команд управления 6 электрически соединены соответственно с выходом телевизионного сигнала оптико-электронной системы 2 и выходом двухкоординатного поворотного устройства 3 оптико-электронной системы 2. Второй, третий и четвертый выходы блока обработки видеоинформации и формирования команд управления 6 электрически соединены соответственно со вторым электрическим входом радиостанции связи 13, вторым входом первого усилителя мощности 8 и входом второго усилителя мощности 9. Выходы первого 8 и второго 9 усилителей мощности электрически соединены соответственно со входом приводов рулей управления 10 и входом двухкоординатного поворотного устройства 3 оптико-электронной системы 2. Оптико-электронная система 2 включает телевизионный и тепловизионный каналы.
Телевизионный канал оптико-электронной системы 2 выполнен на базе ПЗС-матрицы 1/2" с возможностью формирования сигналов узкого и широкого полей зрения с накоплением сигнала, обеспечивающим возможность наблюдения как в дневных, так и в ночных условиях. Спектральный состав чувствительности смещен в сторону ближнего ИК-диапазона, что обеспечивает хорошие условия для наблюдения благодаря увеличенному пропусканию этого диапазона атмосферой.
В тепловизионном канале оптико-электронной системы 2 используется матричный охлаждаемый тепловизор третьего поколения с двумя полями зрения типа Thermovision 1500 производства фирмы FLIR SYS. Тепловизор обеспечивает возможность формирования как черно-белого изображения, так и цветного в соответствии с температурными полями наблюдаемых объектов. В составе тепловизора используется эффективная система управления, обеспечивающая автоматическую настройку чувствительности и резкости при наблюдении. Два переключаемых поля зрения обеспечивают возможность предварительного обзора больших участков местности в широком поле зрения с последующим увеличением изображения в интересующей зоне.
Радиолокационная станция с фазированной решеткой 1 выполнена с возможностью работы как в режиме реального луча, так и в режиме синтезированной апертуры. Зона реального луча обеспечивает обнаружение целей в зоне по курсу летательного аппарата в секторе от -35 до +35 град. Зона синтезированной апертуры обеспечивает обнаружение и сопровождение атакуемых целей в более широком секторе от -60 град. до +60 град.
Центральный вычислительный блок выполняет следующие функции:
- обеспечивает прокачку диаграммы направленности радиолокатора по выбранному закону для просмотра зоны поиска без пропусков,
- обрабатывает информацию приемного тракта радиолокатора,
- выделяет из потока информации фоновой обстановки приемного тракта радиолокатора приоритетные цели и формирует целеуказание на привод перемещения линии визирования оптико-электронной системы,
- прогнозирует по данным радиолокатора и оптико-электронной системы положение подвижных и неподвижных объектов для расчета времени пуска заряда,
- синхронизирует работу радиолокатора и оптико-электронной системы,
- формирует команду боевого пуска заряда, заблаговременно информируя об этом оператора,
- принимает от оператора команду о запрете команды пуска заряда,
- формирует топологию рассмотренных полей радиолокатором и оптико-электронной системой зоны поиска с внесением в память координат обнаруженных целей для повторных автоматических заходов на поражение,
- принимает и обрабатывает команды ручного управления оператора по линии связи.
Блок обработки видеоинформации и формирования команд управления 6 выполняет следующие функции:
- вычисляет координаты изображения цели с одновременным улучшением видения фоноцелевой обстановки с выдачей сигналов управления в течение 20 мс (полукадр),
- автоматически подбирает размеры следящего строба, что позволяет разгрузить оператора от необходимости вручную задавать размеры строба,
- автоматически обнаруживает цели во всем растре изображения по характерным признакам,
- осуществляет электронную стабилизацию изображения как при неподвижном, так и при подвижном поле зрения,
- интегрирует изображения, полученные в разных полях информации (в поле оптического контраста - телевизионное изображение, в поле теплового контраста - тепловизионное изображение), что сокращает время и повышает вероятность обнаружения и распознавания целей на сложных фонах,
- разворачивает изображение вокруг оси Х при креновых колебаниях носителя,
- осуществляет электронное масштабирование изображения,
- осуществляет многоцелевое автоматическое сопровождение малоразмерных целей, по одной цели замыкается пространственный контур сопровождения, по остальным целям ведется электронное сопровождение,
- осуществляет автоматический дозахват цели при длительном прерывании оптической связи (до 6 с).
Стабилизация положения оптико-электронной системы 2 построена на базе гиростабилизированной платформы 4 со стабилизацией по азимуту - Y, углу места - Z и крену - X.
Для обеспечения необходимой стабилизации применены три независимых гироскопических элемента, установленных по осям X, Y и Z.
Прицельный комплекс боевого беспилотного летательного аппарата работает следующим образом.
Боевой беспилотный летательный аппарат направляется в выбранный район поиска целей. Предполагаемыми целями являются: бронетанковая техника, различные виды автотранспорта, группы террористов. При подлете к заданному району включается радиолокационная станция с фазированной решеткой 1, которая ведет просмотр заданного района в радиоконтрастном информационном поле (фиг.2). Информация о радиоконтрастных целях поступает в центральный вычислительный блок 5, записывается в память, оцифровывается, направляется на шифратор радиостанции связи 13 и передается на наземный командный пункт. Поступившая информация записывается на электронную карту местности в память вычислителя командного пункта 15, а также воспроизводится на видеомониторе 19 и анализируется оператором. Последний, анализируя поступившую информацию, направляет вектор скорости боевого беспилотного летательного аппарата в заинтересовавшую его зону обзора.
При поступлении команды управления боевым беспилотным летательным аппаратом от оператора на центральный вычислительный блок 5 последний формирует текущие углы рассогласования линии визирования оптико-электронной системы 2 и направления на цель, полученного радиолокационной станцией 1, относительно вектора скорости V боевого беспилотного летательного аппарата. От центрального вычислительного блока 5 указанные углы рассогласования поступают на блок обработки видеоинформации и формирования команд управления 6.
Блок обработки видеоинформации и формирования команд управления 6 формирует команды управления двухкоординатным поворотным устройством 3 до наложения поля зрения оптико-электронной системы 2 на выбранную цель. Для обеспечения необходимой реакции оператора и его работы в реальном масштабе времени линия визирования оптико-электронной системы 2 должна быть направлена в зону переднего обзора. В этом случае высота полета Н определяется как функция дальности L до цели, т.е. Н=Lsinδ. При вхождении цели в зону радиуса 2/3 поля зрения оптико-электронной системы происходит автоматический захват и сопровождение цели линии визирования оптико-электронной системы 2.
Информация, полученная в информационных полях оптического и теплового контраста, поступает оператору и одновременно на центральный вычислительный блок 5.
Центральный вычислительный блок 5 формирует команды управления 6 боевым беспилотным летательным аппаратом в режиме барражирования вокруг цели, так чтобы она всегда оставалась в поле зрения оптико-электронной системы 2 с учетом динамики рулей боевого беспилотного летательного аппарата и скорости отклонения линии визирования оптико-электронной системы.
Оператор, проанализировав изображение цели и приняв решение атаковать цель, формирует команду «Атака» и передает ее на центральный вычислительный блок 5. С этого момента центральный вычислительный блок 5 формирует атакующую траекторию полета боевого беспилотного летательного аппарата на цель (фиг.3) и определяет точку выстрела неуправляемым снарядом или сброса неуправляемого заряда. Линия визирования MN оптико-электронной системы 2 постоянно до момента выстрела или сброса удерживается на цели, при этом в центральный вычислительный блок 5 поступает от блока обработки видеоинформации и формирования команд управления 6 информация об изменении угла рассогласования между вектором скорости боевого беспилотного летательного аппарата V и линией визирования MN. По данной информации, а также по расстоянию L, высоте Н, скорости полета V, вида боеприпаса и скорости ветра центральный вычислительный блок 5 определяет точку выстрела или сброса боеприпаса. Если цель движется, то вычисляется угол упреждения.
Таким образом, предлагаемый прицельный комплекс беспилотного летательного аппарата позволяет, при использовании боеприпасов неуправляемого типа, достичь точности попадания в цель сравнимой с точностью попадания в цель боеприпасов с головками самонаведения.
Промышленная применимость изобретения определяется тем, что предлагаемый комплекс может быть изготовлен в соответствии с предлагаемым описанием и чертежами на основе известных комплектующих изделий при использовании современного технологического оборудования и использован по прямому назначению для управления беспилотными летательными аппаратами.
Источники информации
1. Кириллов А. Перспективные зарубежные боевые беспилотные аппараты. «Зарубежное военное обозрение» №12-2001, стр 35-36.
2. Ростич Р. Разработка в США перспективных беспилотных летательных аппаратов для ВМС. «Зарубежное военное обозрение» №7-2003, стр 61-63.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2019 |
|
RU2737634C2 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2022 |
|
RU2791341C1 |
| Способ дальнего обнаружения и поражения малозаметных воздушных и наземных целей | 2022 |
|
RU2804559C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2011 |
|
RU2488775C1 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 2007 |
|
RU2348890C2 |
| ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2010 |
|
RU2442942C1 |
| Система боевых беспилотных летательных аппаратов | 2022 |
|
RU2808733C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2019 |
|
RU2742130C1 |
| АВИАЦИОННЫЙ ИНТЕГРИРОВАННЫЙ МНОГОКАНАЛЬНЫЙ, МНОГОРЕЖИМНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС | 2004 |
|
RU2266235C1 |
| Общевойсковая нашлемная система отображения информации, управления и целеуказания | 2019 |
|
RU2730727C1 |

Изобретение относится к области вооружения и военной техники, в частности к области использования беспилотных летательных аппаратов в военных целях. Техническим результатом изобретения является создание для боевого беспилотного летательного аппарата системы прицеливания для оружия, использующего боеприпасы неуправляемого типа, сравнимого по точности попадания в цель с точностью попадания боеприпасов с головками самонаведения. Технический результат изобретения достигается тем, что прицельный комплекс боевого беспилотного летательного аппарата в составе бортового радио-оптико-электронного оборудования включает радиолокационную станцию с фазированной решеткой, радиостанцию связи с наземным командным пунктом, оптико-электронную систему в видимом и ИК-диапазонах волн, блок питания и высотомер. Согласно изобретению, бортовое радио-оптико-электронное оборудование дополнительно включает центральный вычислительный блок, блок обработки видеоинформации и формирования команд управления, первый усилитель мощности и второй усилитель мощности. Оптико-электронная система включает телевизионный и тепловизионный каналы, двухкоординатное поворотное устройство и систему стабилизации линии визирования. Телевизионный и тепловизионный каналы оптико-электронной системы могут быть выполнены с возможностью формирования сигналов узкого и широкого полей зрения. Радиолокационная станция с фазированной решеткой может быть выполнена с возможностью работы как в режиме реального луча, так и в режиме синтезированной апертуры. Система стабилизации линии визирования оптико-злектронной системы может быть выполнена прямой в виде гироскопической платформы или косвенной. 5 з.п. ф-лы, 3 ил.
| РОСТИЧ Р | |||
| Разработка в США перспективных беспилотных летательных аппаратов для ВМС | |||
| Зарубежное военное обозрение | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| ОПТИКО-ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ПРИЦЕЛИВАНИЯ И ДАЛЬНОМЕТРИРОВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2122699C1 |
| ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 1999 |
|
RU2150068C1 |
| US 5331881 A, 26.07.1994 | |||
| US 3848509 A, 19.11.1974. | |||

