Изобретение относится к области военной техники и может быть использовано в конструкциях пушечных, ракетных и пушечно-ракетных зенитных установок малой дальности.
Известно устройство для управления вооружением зенитного комплекса с комбинированным ракетно-пушечным вооружением по патенту RU №2191974 [1], содержащее основную башню, установленную на корпусе зенитного комплекса с возможностью вращения относительно вертикальной оси, ракетное и пушечное вооружение, установленное с возможностью вращения вокруг горизонтальной оси. При этом зенитный комплекс снабжен поворотной платформой, установленной на основной башне с возможностью вращения вокруг вертикальной оси. Ракетное вооружение установлено на поворотной платформе, а пушечное - на основной башне.
Однако данное устройство характеризуется некоторыми недостатками: наличие двух независимых платформ наведения пушечного и ракетного вооружения предполагает усложнение программного обеспечения, формирующего сигналы управления платформой ракетного вооружения для обеспечения стрельбы ракетами и платформой наведения пушечного вооружения для наведения пушек в упрежденную точку, с постоянным отслеживанием изменяющихся координат этой точки по мере движения воздушной цели. Соответственно, к вычислительным средствам зенитного комплекса, формирующим сигналы наведения платформ вооружения, должны предъявляться повышенные требования на быстродействие и производительность. Дополнительно наличие двух независимых приводов наведения значительно усложняет зенитный комплекс и снижает его надежность и ремонтопригодность.
Известна зенитная ракетно-пушечная боевая машина (БМ) по патенту RU №2156943 [2], содержащая башенную установку с пушечным и ракетным вооружением, с радиолокационной станцией (РЛС) обнаружения целей, РЛС сопровождения цели см-диапазона с антенной колонкой и приводами наведения и стабилизации, с оптико-электронной аппаратурой визирования зенитной управляемой ракеты (ЗУР), состоящей из устройства съема координат и блока выделения координат ЗУР, и цифровой вычислительной системой, а также радиолокационный ответчик мм-диапазона, устанавливаемый на ЗУР, радиолокационный канал визирования мм-диапазона, состоящий из антенн захвата и вывода по азимуту и углу места, основной антенны, диаграммообразующей схемы, двухканального высокочастотного приемника, установленных на антенной колонке, и двухканального низкочастотного приемника, размещенного в башенной установке. При этом радиолокационный ответчик мм-диапазона путем передачи высокочастотных сигналов связан с входами антенн захвата и вывода по азимуту и углу места и входом основной антенны, выходы антенн соединены с входами диаграммообразующей схемы, выходы которой подключены к азимутальному и угломестному входам двухканального высокочастотного приемника, выходы которого соответственно соединены с азимутальным и угломестным входами двухканального низкочастотного приемника, состоящего из последовательно соединенных аналоговой части, аналогово-цифрового преобразователя и цифрового управляемого устройства, выходы которого соединены с управляющими входами антенн захвата и вывода по азимуту и углу места, диаграммообразующей схемы и двухканального высокочастотного приемника, а выход двухканального низкочастотного приемника соединен с входом цифровой вычислительной системы БМ.
При боевой работе ракетным вооружением после обнаружения цели и выдачи целеуказания РЛС обнаружения производится захват цели на автосопровождение РЛС см-диапазона. При входе цели в зону поражения ракетным вооружением производится пуск ЗУР, после чего ЗУР попадает в диаграммы направленности антенн захвата и вывода по азимуту и углу места, а также в поле зрения оптико-электронной аппаратуры визирования ЗУР, которые начинают независимо друг от друга следить за ЗУР. При этом координаты ЗУР непрерывно поступают в цифровую вычислительную систему БМ. В зависимости от погодных условий выбирается режим наведения по оптико-электронной аппаратуре или радиолокационному каналу мм-диапазона. Оптико-электронная система выбирается в яснопогодных дневных условиях. Радиолокационный канал целесообразно выбирать в ночных и сложных погодных условиях. Цифровая вычислительная система БМ определяет угловые отклонения ЗУР относительно линии визирования цели и формирует соответствующие команды управления, передавая их в РЛС сопровождения см-диапазона, где они кодируются и затем передаются на борт ЗУР. Аппаратура ЗУР обрабатывает команды управления и осуществляет вывод ЗУР на линию визирования и удержание на ней до поражения цели.
Однако данное устройство имеет недостатки: ответный сигнал ЗУР, формируемый в мм-диапазоне, характеризуется большим затуханием в атмосфере и особенно в сложных метеоусловиях (снег, дождь, туман) [3]. В результате резко снижается дальность управляемой стрельбы ЗУР и точность ее наведения и соответственно снижается боевая эффективность зенитного комплекса. Одновременно канал наведения мм-диапазона подвержен воздействию умышленных радиоэлектронных помех, в результате чего сигналы ответчика ЗУР могут быть полностью подавлены, что приведет к полному срыву наведения [4, 5].
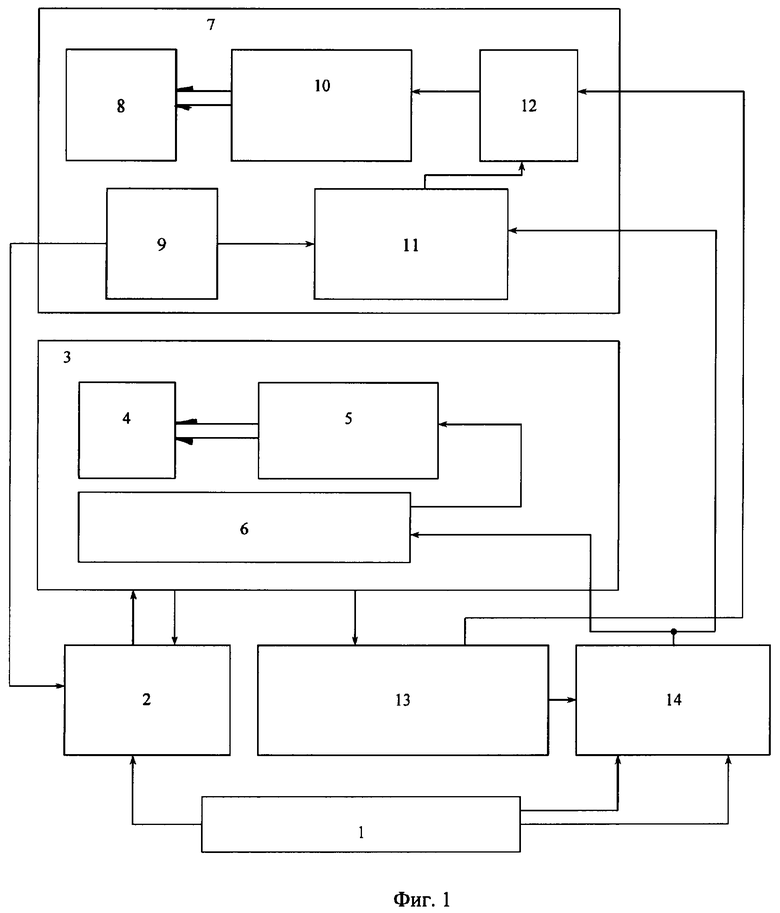
Известна зенитная самоходная установка (ЗСУ) (боевая машина) по патенту №2244242 [6], содержащая башенную установку с пушечным и ракетным вооружением и РЛС обнаружения цели. На электрической функциональной схеме (фиг.1) показаны также входящие в состав известной ЗСУ пульт 1 управления, цифровая вычислительная система 2, РЛС 3 сопровождения цели с антенной 4, приводом 5 наведения и стабилизации антенны, блоком 6 коррекции привода наведения и стабилизации антенны; оптический канал наведения 7 с оптическим прицелом (ОП) 8, датчиком команд 9, приводом 10 наведения и стабилизации ОП, блоком 11 преобразования сигналов управления и сумматором 12; блок 13 вычисления скоростей изменения угловых координат цели и выработки сигналов подслеживания, устройство 14 формирования команды «Разгрузка».
В данной ЗСУ реализованы два режима сопровождения цели: радиолокационный и оптический с возможностью перехода с одного режима на другой.
Радиолокационный режим является полностью автоматическим и осуществляется РЛС сопровождения цели по трем координатам: азимуту β, углу места ε и дальности Д. Радиолокационный режим предназначен для осуществления наведения пушечного вооружения.
Оптический режим предназначен для управления ракетным вооружением и является полуавтоматическим. Данный режим предусматривает наведение ОП на цель наводчиком только по угловым координатам β, ε.
Известная ЗСУ функционирует следующим образом. РЛС обнаружения целей (не показано) осуществляет круговой обзор пространства и при появлении «чужой» отметки (цели) на экране индикатора кругового обзора оператор РЛС совмещает маркер целеуказания с отметкой от цели, при этом в цифровую вычислительную систему 2 поступают сигналы, пропорциональные азимуту β и дальности Д до цели, которые затем поступают на привод 5 наведения и стабилизации антенны и дальномер РЛС 3 сопровождения цели, после чего РЛС сопровождения цели производит допоиск цели по углу места ε и берет цель на автосопровождение по трем координатам β, ε, Д. При этом координаты цели β, ε, Д поступают в цифровую вычислительную систему 2. При входе цели в зону поражения ЗУР с пульта управления 1 на устройство 14 формирования команды «Разгрузка» поступает команда «Р». Координаты сопровождаемой цели β, ε из РЛС 3 сопровождения цели поступают в блок 13 вычисления скоростей изменения угловых координат цели и выработки сигналов подслеживания. Из блока 13 управляющий сигнал поступает в устройство 14 формирования команды «Разгрузка», а скоростные сигналы подслеживания поступают через сумматор 12 на вход привода 10 наведения и стабилизации ОП, который отрабатывает их, тем самым осуществляя автоматическое подслеживание ОП 8 за скоростным изменением угловых координат цели.
После визуального обнаружения цели наводчиком с пульта 1 управления выдается команда «ОП», которая поступает на вход устройства 14 формирования команды «Разгрузка». При наличии на входах устройства 14 формирования команды «Разгрузка» управляющего сигнала и команд «ОП» и «Р» вырабатывается команда «Разгрузка», которая поступает в блок 6 коррекции привода наведения и стабилизации антенны на переключатель структуры привода, который срабатывает и подключает блок 6 к приводу 5 наведения и стабилизации антенны, при этом изменяется структура привода наведения и стабилизации антенны, повышая плавность и точность сопровождения цели, за счет сужения полосы пропускания следящей системы. Команда «Разгрузка» поступает также в блок 11 преобразования сигналов управления на переключатель скоростей управления, который срабатывает и подключает блок 11 к датчику команд 9, что уменьшает скорость изменения сигналов управления с датчика команд. В сумматоре 12 сигналы управления суммируются с сигналами подслеживания и затем суммарный сигнал поступает на вход привода 10 наведения и стабилизации ОП. Дальнейшее участие наводчика в процессе наведения сводится к визуальному наблюдению подслеживания ОП 8 за целью, сопровождаемой РЛС 3, и при необходимости корректировке сопровождения путем плавного совмещения цели с маркой ОП. Таким образом, обеспечиваются улучшенные точностные характеристики сопровождения цели наводчиком, необходимые для наведения на цель ЗУР.
Однако данное устройство характеризуется недостатками: сопровождение цели наводчиком с помощью оптического прицела возможно только в яснопогодных дневных условиях, наведение ракетного вооружения с помощью оптического канала наведения ночью или в сложных погодных условиях (снег, дождь, туман) невозможно. Радиолокационная станция обеспечивает обнаружение и сопровождение цели в сложных погодных условиях, однако зондирующее излучение является демаскирующим признаком работы ЗСУ. Одновременно радиолокационная станция является уязвимой для постановки умышленных активных помех и применения противорадиолокационных ракет.
Задачей изобретения является обеспечение всепогодного и всесуточного обнаружения цели в пассивном режиме, сопровождения в пассивном режиме в оптическом и инфракрасном (ИК)-диапазонах, сопровождения в активном режиме в радиолокационном диапазоне, а также возможности перехода из режима пассивного сопровождения в режим активного сопровождения и обратно в зависимости от помеховых условий и угрозы применения противником противорадиолокационных ракет.
Поставленная задача решается тем, что зенитная самоходная установка, содержащая башенную установку с пушечным и ракетным вооружением, РЛС сопровождения цели с антенной и приводом наведения и стабилизации антенны, пульт управления и цифровую вычислительную систему, при этом первый выход пульта управления соединен с первым входом цифровой вычислительной системы, выход которой соединен с первым входом РЛС сопровождения цели, первый выход которой соединен со вторым входом цифровой вычислительной системы, механический выход привода наведения и стабилизации связан с механическим входом антенны, снабжена теле-тепловизионным блоком, включающим тепловизионную и телевизионную камеры, блоком обработки видеоинформации, видеосмотровым устройством, схемой коммутации, а РЛС сопровождения цели снабжена блоком выделения сигнала ошибки, выход которого является вторым выходом РЛС сопровождения цели и соединен с первым входом схемы коммутации, второй выход пульта управления соединен со вторым входом схемы коммутации, выход которой соединен со входом привода наведения и стабилизации антенны, который является вторым входом РЛС сопровождения цели, выход тепловизионной камеры является первым выходом теле-тепловизионного блока и соединен с первым входом блока обработки видеоинформации, выход телевизионной камеры является вторым выходом теле-тепловизионного блока и соединен со вторым входом блока обработки видеоинформации, первый выход которого соединен со входом видеосмотрового устройства, а второй выход соединен с третьим входом схемы коммутации, при этом механический вход антенны РЛС сопровождения цели объединен с механическим входом теле-тепловизионного блока.
Изобретение иллюстрируется чертежами, представленными на фиг.1 и 2, где на фиг.1 представлена электрическая функциональная схема прототипа, на фиг.2 - электрическая функциональная схема ЗСУ.
В состав ЗСУ входят башенная установка с пушечным и ракетным вооружением (не показано), пульт 1 управления, цифровая вычислительная система 2, РЛС 3 сопровождения цели с антенной 4, приводом 5 наведения и стабилизации антенны и блоком 15 выделения сигнала ошибки; теле-тепловизионный блок 16, включающий тепловизионную 17 и телевизионную 18 камеры; блок 19 обработки видеоинформации, видеосмотровое устройство 20, схема коммутации 21. Первый выход пульта управления 1 соединен с первым входом цифровой вычислительной системы 2, выход которой соединен с первым входом РЛС 3 сопровождения цели, первый выход которой соединен со вторым входом цифровой вычислительной системы 2, а второй выход является выходом блока 15 выделения сигнала ошибки и соединен с первым входом схемы коммутации 21, второй выход пульта управления 1 соединен со вторым входом схемы коммутации 21, выход которой соединен со входом привода 5 наведения и стабилизации антенны, который является вторым входом РЛС 3 сопровождения цели, выход тепловизионной камеры 17 является первым выходом теле-тепловизионного блока 16 и соединен с первым входом блока 19 обработки видеоинформации, выход телевизионной камеры 18 является вторым выходом теле-тепловизионного блока 16 и соединен со вторым входом блока 19 обработки видеоинформации, первый выход которого соединен со входом видеосмотрового устройства 20, а второй выход соединен с третьим входом схемы коммутации 21. Механический выход привода 5 наведения и стабилизации антенны связан с механическим входом антенны 4, который объединен с входом теле-тепловизионного блока 16.
ЗСУ функционирует следующим образом. Поиск цели возможно производить в двух режимах: в режиме с активным излучением с помощью радиолокационной станции сопровождения или в пассивном режиме с помощью теле-тепловизионного блока. Режимы работы ЗСУ задаются оператором с пульта управления 1.
При поиске цели в режиме с активным излучением РЛС 3 сопровождения цели производит поиск цели в режиме секторного или кругового поиска, параметры которого задаются управляющими сигналами цифровой вычислительной системы 2. При появлении отметки от цели на экране индикатора кругового обзора оператор РЛС берет цель на автосопровождение по трем координатам β, ε, Д. При этом координаты цели β, ε, формируемые РЛС 3 сопровождения цели, поступают на вход блока выделения сигнала ошибки 15 для формирования управляющих сигналов, используемых для воздействия на привод 5 наведения и стабилизации для доворота антенны 4 таким образом, чтобы цель находилась на электрической оси (равносигнальном направлении) диаграммы направленности антенны. Сигнал ошибки поступает на привод 5 наведения и стабилизации через схему коммутации 21. В цифровом виде координаты цели β, ε, Д поступают в цифровую вычислительную систему 2, которая производит расчет траектории цели и определяет момент входа цели в зону поражения пушечным или ракетным вооружением.
При поиске цели в пассивном режиме с помощью теле-тепловизионного блока 16 оператор производит поиск цели, задавая с пульта управления 1 движение антенны 4, на которой механически расположен теле-тепловизионный блок 16. Формируемые тепловизионной камерой 17 и телевизионной камерой 18 изображения через блок 19 обработки видеоинформации поступают в видеосмотровое устройство 20. При появлении видеоизображения цели на экране видеосмотрового устройства 20 оператор РЛС производит захват цели на автосопровождение. В данном режиме блок 19 обработки видеоизображения обеспечивает формирование сигнала ошибки сопровождения по угловым координатам β, ε (сигнала рассогласования между оптической осью теле-тепловизионного блока и угловым расположением наблюдаемой цели), который используется для воздействия на привод 5 наведения и стабилизации для доворота антенны 4 таким образом, чтобы цель находилась на оптической оси теле-тепловизионного блока 16. Сигнал ошибки поступает на привод 5 наведения и стабилизации через схему коммутации 20.
При этом оптическая и электрическая оси теле-тепловизионного блока 16 датчиков видеоизображения и антенны 4 совпадают. Это позволяет при применении противником помех в радиодиапазоне или угрозе применения противорадиолокационных ракет переходить из активного режима сопровождения в пассивный с помощью теле-тепловизионного блока 16. При применении противником оптических помех или угрозе потери цели в сложных погодных условиях (снег, дождь) - переходить из пассивного режима сопровождения в активный без дополнительного допоиска цели.
Телевизионный канал может быть реализован на матричном фотоприемном устройстве на основе ПЗС матрицы [7].
Тепловизионный канал может быть реализован, например, на матричном фотоприемном устройстве на основе неохлаждаемой микроболометрической матрицы [8].
Оба канала позволяют получить на выходе изображение фоновой и целевой обстановки без дополнительного сканирования.
Блок обработки видеоинформации реализован на основе автомата сопровождения цели, предназначенного для обеспечения цифровой обработки видеосигналов, получаемых от оптических и тепловизионных датчиков и формирования сигнала ошибки сопровождения [9].
В качестве видеосмотрового устройства может быть использованы электроннолучевая трубка или плазменная панель.
Предлагаемое техническое решение реализовано в новой модификации зенитной самоходной установки 2А6М4 («Шилка-М4»). В настоящее время изделие 2А6М4 успешно прошло предварительные (заводские) испытания. В состав зенитной самоходной установки введен комплект аппаратуры, предназначенный для получения тепловизионного и телевизионного изображения цели, а также обработки полученной видеоинформации в целях решения задач управления вооружением.
Литература
1. Патент RU №2191974. Опубликовано 27.10.2002 г.
2. Патент RU №2156943. Опубликовано 27.09.2000 г.
3. Бартон Д. Радиолокационные системы / перевод с англ. Под ред. К.Н.Трофимова. Военное издательство, - М.: 1967, 480 с., ил.
4. Вакин С.А., Шустов Л.И. Основы радиопротиводействия и радиотехнической разведки. - М.: Советское радио, 1968 г. - 448 стр.: ил.
5. Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное подавление информационных каналов систем управления оружием / Под ред. Ю.М.Перунова. - М.: «Радиотехника», 2003 г. - 416 с.: ил.
6. Патент RU №2244242. Опубликовано 10.01.2005 г. (прототип).
7. Тарасов В. Многоспектральные оптико-электронные системы - основа эффективности интеллектуального высокоточного оружия. Военный парад, 2003, №5, стр.70-71.
8. Иванов В., Белозеров А., Бугаенко А. НПО ГИПО: перспективы тепловидения в реальности. Военный парад, 2002, №4, стр.94-96.
9. Итенберг. И. Интеллектуальная обработка изображений - конкурентное преимущество боевых комплексов. Военный парад, 2003, №4, стр.78-79.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОЕВАЯ МАШИНА | 2003 |
|
RU2244242C1 |
| ЗЕНИТНАЯ ПУШЕЧНО-РАКЕТНАЯ БОЕВАЯ МАШИНА | 2007 |
|
RU2348001C1 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 1998 |
|
RU2135924C1 |
| СПОСОБ НАВЕДЕНИЯ ОПТИЧЕСКОГО ПРИЦЕЛА НА ЦЕЛЬ | 2001 |
|
RU2217681C2 |
| ЗЕНИТНАЯ ПУШЕЧНО-РАКЕТНАЯ БОЕВАЯ МАШИНА | 2000 |
|
RU2191973C2 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| ЗЕНИТНАЯ РАКЕТНО-ПУШЕЧНАЯ БОЕВАЯ МАШИНА | 1999 |
|
RU2156943C1 |
| ЗЕНИТНАЯ РАКЕТНО-ПУШЕЧНАЯ БОЕВАЯ МАШИНА | 2015 |
|
RU2584404C1 |
| Зенитная ракетно-пушечная боевая машина | 2016 |
|
RU2618663C1 |
| ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2002 |
|
RU2241193C2 |
Изобретение относится к области военной техники. Технический результат - обеспечение всепогодного и всесуточного обнаружения цели в пассивном режиме, сопровождение в пассивном режиме в оптическом и ИК-диапазонах, сопровождение в активном режиме в радиолокационном диапазоне, а также возможности перехода из режима пассивного сопровождения в режим активного сопровождения и обратно в зависимости от помеховых условий и угрозы применения противником противорадиолокационных ракет. Установка содержит башенную установку с пушечным и ракетным вооружением, РЛС сопровождения цели с антенной и приводом наведения и стабилизации антенны, пульт управления и цифровую вычислительную систему. Установка снабжена теле-тепловизионным блоком, включающим тепловизионную и телевизионную камеры, блоком обработки видеоинформации, видеосмотровым устройством, схемой коммутации, а РЛС сопровождения цели снабжена блоком выделения сигнала ошибки, выход которого является вторым выходом РЛС сопровождения цели и соединен с первым входом схемы коммутации, второй выход пульта управления соединен со вторым входом схемы коммутации, выход которой соединен с входом привода наведения и стабилизации антенны, который является вторым входом РЛС сопровождения цели. 2 ил.
Зенитная самоходная установка, содержащая башенную установку с пушечным и ракетным вооружением, радиолокационную станцию (РЛС) сопровождения цели с антенной и приводом наведения и стабилизации антенны, пульт управления и цифровую вычислительную систему, при этом первый выход пульта управления соединен с первым входом цифровой вычислительной системы, выход которой соединен с первым входом РЛС сопровождения цели, первый выход которой соединен со вторым входом цифровой вычислительной системы, механический выход привода наведения и стабилизации связан с входом антенны, отличающаяся тем, что она снабжена теле-тепловизионным блоком с телевизионной и тепловизионной камерами, блоком обработки видеоинформации, видеосмотровым устройством, схемой коммутации, а РЛС сопровождения цели снабжена блоком выделения сигнала ошибки, выход которого является вторым выходом РЛС сопровождения цели и соединен с первым входом схемы коммутации, второй выход пульта управления соединен со вторым входом схемы коммутации, выход которой соединен со входом привода наведения и стабилизации антенны, который является вторым входом РЛС сопровождения цели, выход тепловизионной камеры является первым выходом теле-тепловизионного блока и соединен с первым входом блока обработки видеоинформации, выход телевизионной камеры является вторым выходом теле-тепловизионного блока и соединен со вторым входом блока обработки видеоинформации, первый выход которого соединен с входом видеосмотрового устройства, а второй выход соединен с третьим входом схемы коммутации, при этом механический вход теле-тепловизионного блока объединен с механическим входом антенны РЛС сопровождения цели.
| БОЕВАЯ МАШИНА | 2003 |
|
RU2244242C1 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 1998 |
|
RU2135924C1 |
| БОЕВАЯ МАШИНА | 1996 |
|
RU2108532C1 |
| DE 3103919 А1, 02.05.1985 | |||
| Аза-арил-1Н-пиразол-1-ил-сульфонамиды | 2013 |
|
RU2627268C2 |
| US 5062586 А, 05.11.1991. | |||

