Изобретение относится к области оптико-электронных устройств слежения, для обнаружения воздушных объектов, которое включает аппаратуру технического контроля и наблюдения за воздушным пространством, а также для обнаружения и распознавания объектов слежения.
Наиболее близким по совокупности существующих признаков аналогом к заявленному изобретению (прототипом), является изобретение под названием «Наземный транспортный комплекс для обнаружения и распознавания объектов» по патенту РФ № 2530185 (B60R 1/00; G08G 1/017; G01S 17/66). Наземный транспортный комплекс для обнаружения и распознавания объектов содержит транспортное средство, преимущественно выполненное в виде автомобиля, в задней части крыши кузова, которого образованы два люка, а салон разделен поперечной силовой перегородкой на два отсека: водительский и аппаратный. В последнем установлены соединенные с приводами два подъемно-мачтовых приспособления, включающих стойки, верхние части которых снабжены опорно-поворотными средствами с установленными на них и соединенными с системой электропитания радиоэлектронными датчиками системы обнаружения и распознавания объектов, выполненными с возможностью прохождения через соответствующие люки и размещения в рабочем положении над крышей кузова автомобиля. Над датчиками закреплены крышки люков, а средство управления датчиками и средство отображения данных установлены на силовой перегородке. Однако этот комплекс имеет недостатки. В частности, сложную и медленную систему развертывания, при которой необходимо соблюдать определенный алгоритм подъема и относительной работы оптико-электронного и радиолокационного модулей во избежание их повреждения. К тому же имеет довольно низкую скорость вращения опорно-поворотных устройств в азимутальной плоскости, узкий диапазон и низкую скорость их перемещения по углу места. Помимо этого, неудобен в использовании по причине того, что, изображения с трех устройств (видеокамеры, радиолокационной станции и тепловизора) поступают всего лишь на два монитора. При этом когерентная радиолокационная станция требует специализированной подготовки оператора, для распознания целей на фоне ложных отметок, которые не позволяют отделить на экране реальный объект от виртуального. Все это ведет к потере времени, имеющего большое значение для успеха операции.
Задача, которую поставил перед собой разработчик является создание такого мобильного комплекса, с помощью которого можно было бы с высокой степенью четкости и объективности обнаруживать и идентифицировать любые воздушные объекты при упрощении конструкции комплекса и повышении эффективности и надежности его работы. Техническим результатом, достигнутым при решении поставленной задачи, является повышение скорости обнаружения и распознавания воздушных объектов за счет того, что опорно-поворотное устройство оптико-электронной системы, выполненное с возможностью вращения в азимутальной плоскости, работает с более высокой скоростью, а перемещение его по углу места работает также с более высокой скоростью и в более широком диапазоне. Также технический результат заключается в расширении арсенала технических средств, выразившемся в обеспечении возможности обнаружения воздушных объектов, определения их типа и отслеживания в любых метеоусловиях. Данный технический результат достигается за счет применения в составе мобильного комплекса активной фазированной антенной-решетки. В то же время, техническим результатом, является повышение удобства и эффективности работы комплекса за счет оптимизации и рационализации совместной работы оптико-электронной системы и смежных устройств, а также за счет возможности передачи информации по каналу Ethernet внешним потребителям.
Сущность изобретения состоит в том, мобильный комплекс для обнаружения воздушных объектов, включающий систему электропитания и оптико-электронную систему, содержащую видеокамеру с тепловизором и установленную на опорно-поворотном устройстве, закрепленном на подъемно-мачтовом приспособлении и выполненном с возможностью вращения на 360 градусов в азимутальной плоскости, а также с возможностью перемещения по углу места, а в верхней части подъемно-мачтового устройства размещена радиолокационная станция, состоящая из цифровой приемной активной фазированной антенной-решетки, состоящей из восьми антенных элементов, передающей антенны, восьми четырехканальных приемных модуля, модуля цифрового формирования и обработки сигналов, передающего модуля и усилителя мощности. Кроме того модуль цифрового формирования и обработки сигналов содержит 8 цифровых приемных каналов обработки. Также радиолокационная станция и оптико-электронная система смонтированы на одном подъемно-мачтовом устройстве. Сам мобильный комплекс выполнен с возможностью размещения подъемно-мачтового приспособления в походном положении внутри транспортного средства. А также он выполнен с возможностью передачи видеоинформации внешним потребителям. Кроме того, в его состав включена система ночного вождения, состоящая из неохлаждаемого тепловизора, установленного в переднем бампере транспортного средства и видеомонитора, установленного в поле зрения водителя транспортного средства. Также он выполнен с возможностью автоматического переключения на питание от аккумуляторной батареи. Кроме этого он выполнен с возможностью автоматической подзарядки от аккумуляторной батареи.
Доказательства возможности осуществления мобильного комплекса для обнаружения и распознавания малогабаритных воздушных целей с реализацией указанного назначения приводятся ниже на конкретном примере наземного транспортного комплекса. Этот характерный пример выполнения конкретного наземного транспортного комплекса согласно предлагаемого изобретения ни в коей мере не ограничивает его объем правовой защиты.
Изобретение поясняется чертежами, где изображены:
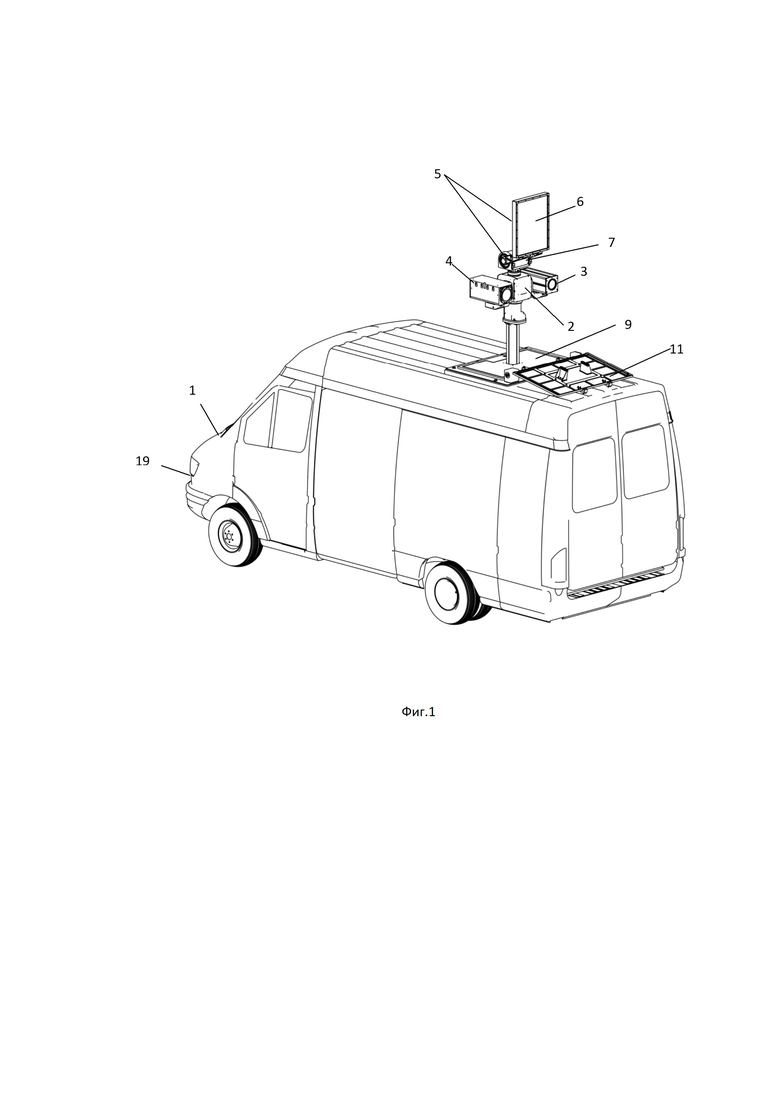
на фиг. 1 - общий вид наземного транспортного комплекса;
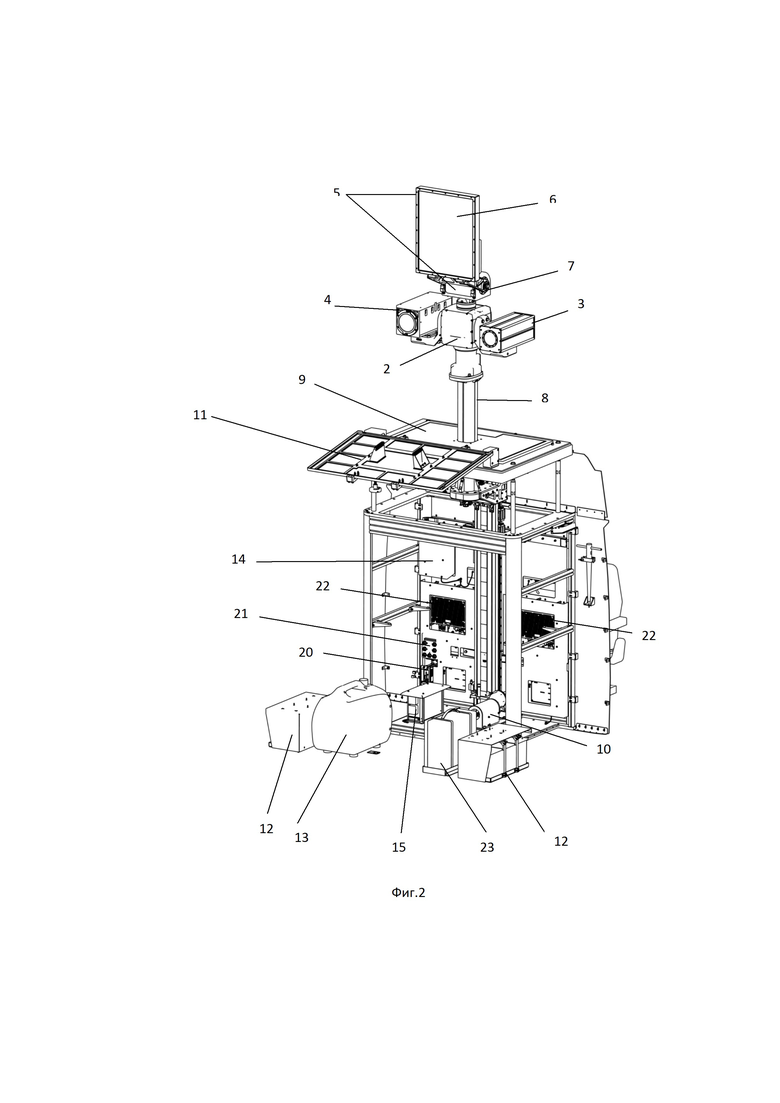
на фиг. 2 - расположение модулей наземного транспортного комплекса в разрезе;
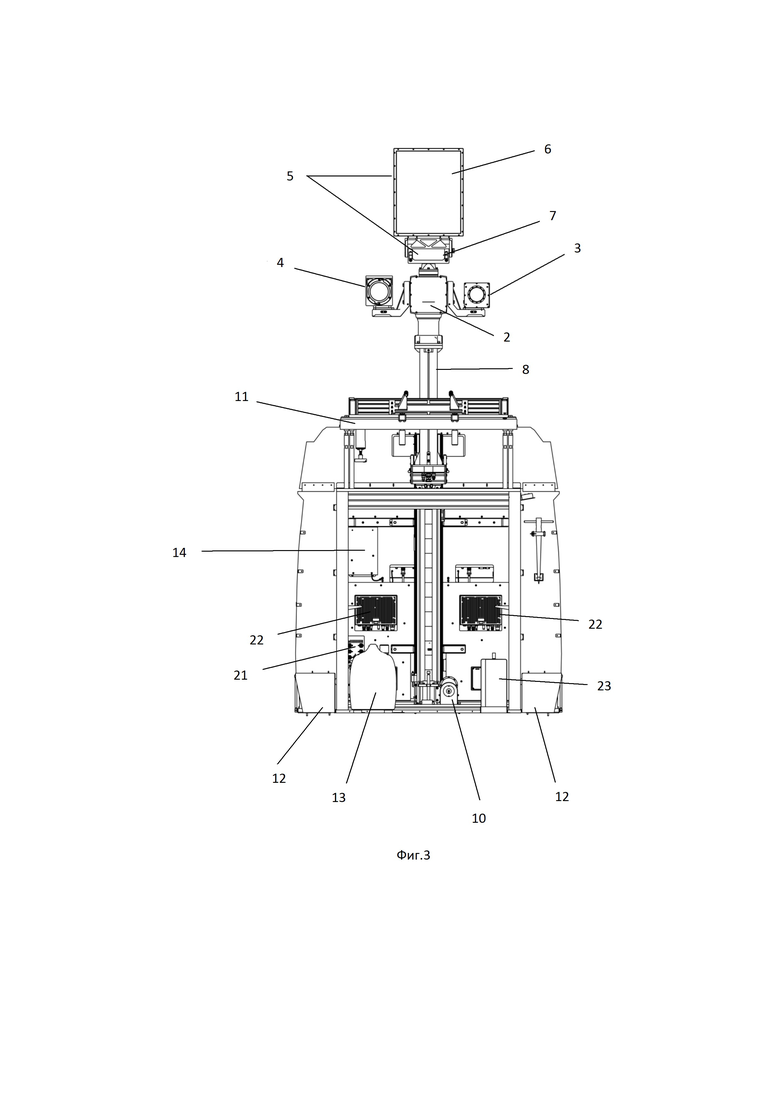
на фиг. 3 - вид наземного транспортного комплекса сзади, в разрезе;
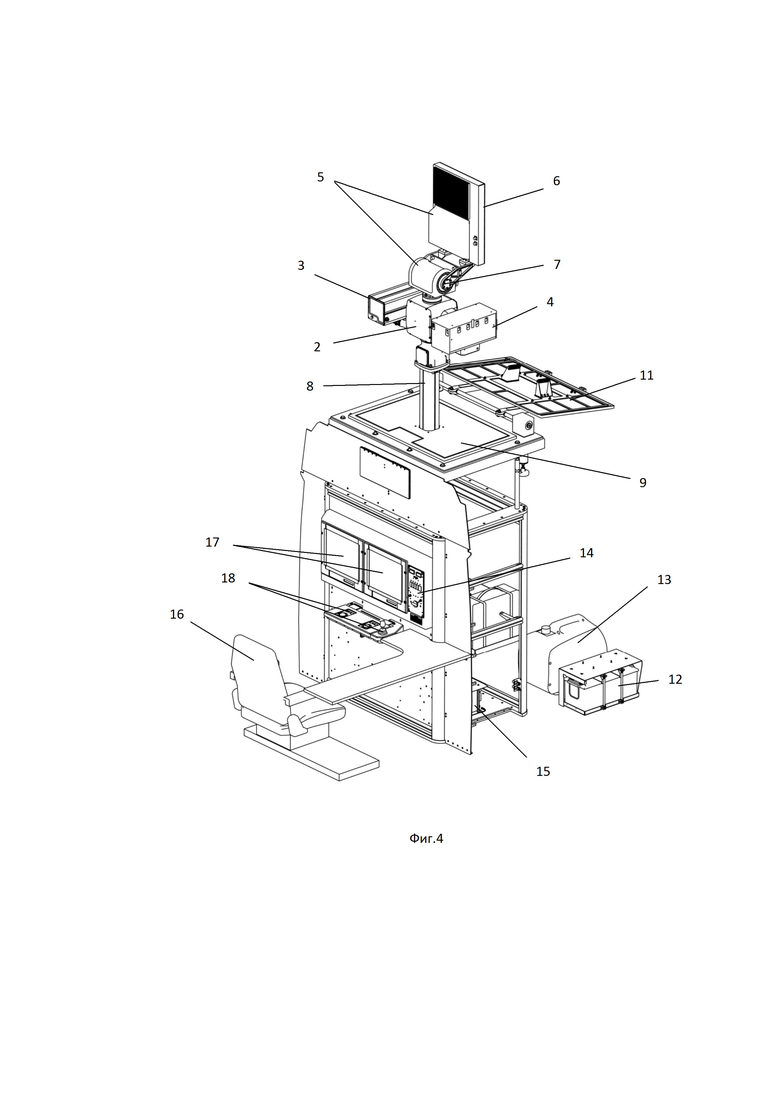
на фиг. 4 - операторский отсек салона, в разрезе;
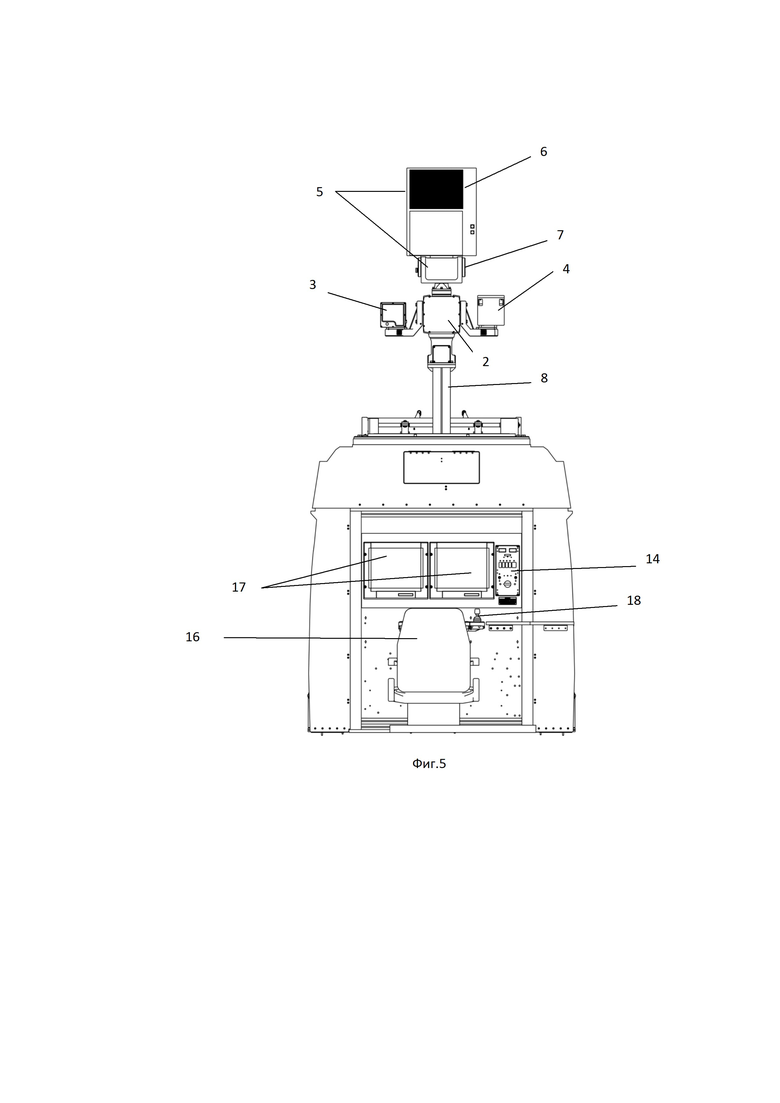
на фиг. 5 - вид наземного транспортного комплекса спереди, в разрезе.
Мобильный комплекс состоит из транспортного средства (ТС) 1, оптико-электронной системы (ОЭС) 2, радиолокационной станции (РЛС) 5, опорно-поворотного устройства (ОПУ) 7, подъемно-мачтового устройства (ПМУ) 8 с заглушкой 9, электродвигателя 10, крышки люка 11, системы электропитания. Кроме того, мобильный комплекс состоит из операторского отсека салона, системы ночного вождения 19, видеоконвертора 20, коммутатора 21, вычислительного модуля 22, приемника навигационной системы GPS/GLONASS (на фиг. не показан), воздушного отопителя 23, системы связи и оповещения (на фиг. не показан). ОЭС 2 выполнено из опорно-поворотного устройства (ОПУ ОЭС), на котором установлены модуль видеокамеры 3 и модуль тепловизора 4. Необходимо подчеркнуть что, ОЭС 2 включает вычислительный модуль 22 и видеоконвертор 20. Вход-выход канала Ethernet ОПУ 7 соединен с первым входом-выходом канала Ethernet коммутатора 21. Радиолокационная станция (РЛС) 5 состоит из активной фазированной антенной-решетки (АФАР) 6 и подъемно-мачтового устройства (ПМУ) 8, с заглушкой 9, на котором соответственно и смонтированы ОЭС 2 и РЛС 5. Операторский отсек салона наземного транспортного мобильного комплекса оборудован креслом оператора 16, мониторами 17 и устройствами ввода информации (органами управления) 18 контролирующими работу комплекса. Ethernet (от англ. ether - «эфир») — пакетная технология передачи данных преимущественно локальных компьютерных сетей. Стандарты Ethernet определяют проводные соединения и электрические сигналы на физическом уровне, формат кадров и протоколы управления доступом к среде — на канальном уровне модели OSI. Ethernet в основном описывается стандартами IEEE группы 802.3. Передачу данных можно осуществлять как с помощью коаксиального кабеля, так и с помощью витой пары или оптического кабеля. Использование последних дает ряд преимуществ, основное из которых – возможность работы в дуплексном режиме (узел может в любой момент времени и передавать, и принимать данные). Выход модуля видеокамеры 3 и тепловизора 4 соединен с видеовходом ОПУ 7. Видеовыходы ОПУ 7 соединены с входом видеомонитора 17 и с входом видеоконвертора 20. Вход-выход канала Ethernet видеоконвертора 20 соединен со вторым входом-выходом канала Ethernet коммутатора 21. Третий вход-выход канала Ethernet коммутатора 21 соединен с входом-выходом канала Ethernet вычислительного модуля 22. Выход видеоизображения вычислительного модуля соединен с видеовходом видеомонитора 13. Кроме того, вычислительный модуль 22 соединен с приемником навигационной системы GPS/GLONASS (на фиг. не указан) и с устройствами ввода информации (органами управления) 18.Система ночного вождения 19 состоит из неохлаждаемого тепловизора (на фиг. не указан), установленного в переднем бампере транспортного средства 1 и видеомонитора (на фиг. не указан), установленного в поле зрения водителя транспортного средства 1. Вход видеосигнала видеомонитора (на фиг. не указан) соединен с видеовыходом неохлаждаемого тепловизора (на фиг. не указан). Вход напряжения постоянного тока видеомонитора соединен с выходом аккумуляторной батареи транспортного средства (АБТС) (на фиг. не указан), имеющей напряжение 12 В. Система связи и оповещения (на фиг. не указана) состоит из сигнальной установки (на фиг. не указана) и УКВ радиостанции (на фиг. не указана). Входы напряжения постоянного тока сигнальной установки (на фиг. не указан) и УКВ радиостанции соединены с выходом АБТС (на фиг. не указан). Также мобильный комплекс содержит креномер (на фиг. не указан) и воздушный отопитель 23. Причем вход напряжения постоянного тока воздушного отопителя 23 напрямую соединен с выходом АБТС (на фиг. не указан), а вход напряжения постоянного тока креномера соединен с выходом АБТС через пульт управления 14. Система электропитания состоит из пульта управления 14, бензиновой электростанции 13, аккумуляторной батареи напряжением 24 В постоянного тока 12, и источника вторичного питания 15 (Фиг.2). Вход напряжения переменного тока пульта управления 14 соединен с выходом напряжения переменного тока бензиновой электростанции 13, а выход напряжения переменного тока пульта управления 14 - с входом напряжения переменного тока источника вторичного питания 15. Вход напряжения постоянного тока пульта управления соединен с выходом аккумуляторной батареи 12, и с выходом напряжения постоянного тока источника вторичного питания. Пульт управления 14 выполнен с возможностью автоматического переключения источника вторичного питания 15 на питание от аккумуляторной батареи 12.
Работает мобильный комплекс следующим образом. Переменный ток частотой ~50 Гц и напряжением 220 В подают от бензиновой электростанции 11, вынесенной за пределы комплекса, или от промышленной сети. С помощью пульта управления этот электрический ток передают на источник вторичного питания 15, где его преобразуют в напряжение 27 В постоянного тока, которым затем производят питание всех систем комплекса. При работе от бензиновой электростанции 13 или от промышленной сети, при помощи контроллера из состава пульта управления 14 производят подзарядку аккумуляторной батареи 12. При кратковременных перерывах питания от бензиновой электростанции 13 или от промышленной сети, автоматически переключают источник вторичного питания на питание от аккумуляторной батареи 12 напряжением 24 В постоянного тока, чтобы избежать потери информации и перезагрузки вычислительного модуля 22. При невозможности работы от бензиновой электростанции 13 или от промышленной сети, при помощи контроллера автоматически переключают источник вторичного питания на питание от аккумуляторной батареи 12. При помощи приемника навигационной системы GPS/GLONASS (на фиг. не указан) определяют собственное местоположение комплекса, выдают информацию в виде координат в вычислительный модуль 22, при помощи которого осуществляют топографическую привязку комплекса и выводят на экран видеомонитора 17 собственные координаты комплекса. При помощи контроллера из состава пульта управления 14 по команде оператора производят подъем подъемно-мачтового устройства 8 из походного положения в рабочее. При помощи ОПУ 7 осуществляют поворот установленных на нем модуля видеокамеры 3 и модуля тепловизора 4 на необходимое положение по азимуту и по углу места по командам оператора при помощи устройств ввода информации (органов управления) 18. Изображение от модуля тепловизора 4 в виде аналоговых сигналов через ОПУ 7 передают в видеоконвертор 20. При помощи видеоконвертора 20 производят преобразование сигналов изображения в цифровой вид и передают обработанные сигналы по каналу Ethernet в коммутатор 21. При помощи коммутатора 21 по каналу Ethernet выдают сигналы в вычислительный модуль 22, где их преобразуют в формат телевизионного изображения. Затем полученную картинку передают на видеомонитор 17. Изображение от модуля видеокамеры в виде аналоговых сигналов через ОПУ передают на видеомонитор 17. По команде оператора возможно переключение изображения от модуля видеокамеры 3 на видеомонитор 13, а изображения от модуля тепловизора 4 на видеомонитор 17. Так как изображение от модуля видеокамеры 3 и от модуля тепловизора 4 поочередно выводят на видеомонитор 13, оператор имеет возможность с большей вероятностью обнаружить, распознать и идентифицировать объект слежения. Управление движением ОПУ 7 осуществляют при помощи вычислительного модуля 22 путем передачи соответствующих команд в ОПУ 7 через коммутатор 21 по каналу Ethernet. Управление режимами работы ОЭС 2 осуществляют при помощи устройства ввода информации (органов управления) 18. РЛС 5 по своей сути доплеровская твердотельная РЛС, в состав которой входит цифровая приемная АФАР 6, состоящая из восьми антенных элементов, передающая антенна, 8 четырехканальных приемных модуля, модуль цифрового формирования и обработки сигналов, передающий модуль и усилитель мощности. Модуль цифрового формирования и обработки сигналов имеет 8 цифровых приемных каналов обработки, действует следующим образом. В процессе цифрового диаграммоформирования формируется 8 приемных лучей. РЛС 5 излучает пачку импульсных сигналов мощностью 100Вт в Х – диапазоне. Максимальная дальность обнаружения цели с эффективной площадью рассеивания (ЭПР) 0.01м2 составляет 4500м, для целей с ЭПР 0.1м2 максимальная дальность обнаружения составляет 8000м. Инструментальная дальность РЛС 5 – 9000м. Точность определения координат цели по дальности составляет 1,5м, по азимуту – 0.50, по углу места – 0.90. Разрешение РЛС 5 по дальности составляет 15м, по скорости 0.1м/с. Сектор электронного сканирования по азимуту составляет 200. Датчик угла наклона транспортного средства ТС1 (на фиг. не указан) используют для корректировки угла места (высоты) на цель. Вычислительный модуль 22 обеспечивает выполнение следующих функций:
- переключение информации, находящейся в поле зрения модуля видеокамеры 3 или модуля тепловизора 4 для отображения на видеомониторе 17;
- осуществление режима сканирования по программируемой оператором траектории;
- создание панорам местности с возможностью быстрого перевода поля зрения модуля видеокамеры 3 или модуля тепловизора 4 в нужные точки панорамы (до 20 точек);
- документирование видео и тепловизионной информации в виде отдельных кадров или видеоролика с возможностью последующего просмотра;
- функционирование режима «детектора движения» во всем поле зрения или же в выбранных оператором «окнах» с автоматическим документированием только движущихся целей;
- функционирование режима автоматического вывода на экран изображения с максимальным увеличением на объект, зарегистрированный детектором движения;
- автоматический вывод звуковых или голосовых сигналов о наличии в зоне обзора движущихся целей.
ОЭС 2 имеет следующие характеристики:
В инфракрасном диапазоне при помощи модуля тепловизора 4:
- беспилотный летательный аппарат (БЛА) типа квадракоптер «Phantom IV» – не менее 2500 м;
- БЛА типа «Гранат», «Элерон» – не менее 3300 м;
- БЛА типа «Орлан-10» – не менее 5700 м.
Поля зрения (оптическое увеличение) – 35,5⁰ ~ 1,8⁰.
Вариообъектив – от 20 до 420 мм.
Цифровое увеличение – 8х.
В видимом диапазоне при помощи модуля видеокамеры 3,
обнаружение цели:
- БЛА типа квадракоптер «Phantom IV» – не менее 2200 м;
- БЛА типа «Орлан-10» – не менее 5500 м.
Поля зрения (оптическое увеличение) – 35⁰ ~ 1,5⁰.
Вариообъектив – от 20 до 420 мм.
Характеристики оптико-электронной системы описанного комплекса для обнаружения и распознавания объектов значительно превышают характеристики большинства известных и применяемых на сегодняшний день оптико-электронных систем. Коммутатор 21 обеспечивает возможность передачи видеоинформации по каналу Ethernet внешним потребителям. При необходимости скрытного движения в ночное время, используют систему ночного вождения 19. При помощи неохлаждаемого тепловизора (на фиг. не указан), установленного в переднем бампере ТС 1 получают изображение местности перед ТС1 в инфракрасном диапазоне и передают его на видеомонитор (на фиг. не указан), установленный в поле зрения водителя ТС 1, что позволяет водителю вести ТС без применения внешних осветительных приборов. Предлагаемое изобретение имеет значительные преимущества перед известными решениями. Радиолокационная станция для обнаружения воздушных объектов мобильна, так как размещена на шасси ТС 1. Комбинированное применение видеокамеры 3, тепловизора 4 и РЛС 5 с АФАР 6 позволяет качественно обнаруживатьвоздушные объекты, определять их тип и отслеживать в любых метеоусловиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| НАЗЕМНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2013 |
|
RU2530185C1 |
| НАЗЕМНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2007 |
|
RU2352480C1 |
| ПОДВИЖНОЙ ПОСТ ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ "ЗВЕРОБОЙ-М" | 2014 |
|
RU2563699C1 |
| Мобильный комплекс мониторинга открытых участков местности | 2019 |
|
RU2708802C1 |
| Мобильный быстроразвёртываемый автономный пост технического наблюдения для контроля обстановки на прибрежных и сухопутных участках и территориях | 2021 |
|
RU2776956C1 |
| ТРАНСПОРТИРУЕМЫЙ КОМПЛЕКС НАБЛЮДЕНИЯ "РЕДУТ" | 2014 |
|
RU2569202C1 |
| МОБИЛЬНАЯ РАДИОЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА | 2023 |
|
RU2817396C1 |
| Система наблюдения и противодействия беспилотным летательным аппаратам | 2020 |
|
RU2738508C1 |
| Автономный пост технического наблюдения для контроля обстановки на охраняемой территории | 2016 |
|
RU2634761C1 |
Изобретение относится к области оптико-электронных устройств слежения и предназначено для обнаружения воздушных объектов, а также для обнаружения и распознавания объектов слежения. Техническим результатом является повышение скорости обнаружения и распознавания воздушных объектов, повышение удобства и эффективности работы наземного транспортного комплекса, а также расширение арсенала технических средств, выразившееся в обеспечении возможности обнаружения воздушных объектов, определения их типа и отслеживания в любых метеоусловиях. Мобильный комплекс для обнаружения воздушных объектов включает систему электропитания и оптико-электронную систему, содержащую видеокамеру с тепловизором и установленную на опорно-поворотном устройстве, закрепленном на подъемно-мачтовом приспособлении и выполненном с возможностью вращения на 360 градусов в азимутальной плоскости, а также с возможностью перемещения по углу места. В верхней части подъемно-мачтового устройства размещена радиолокационная станция, состоящая из цифровой приемной активной фазированной антенной решетки, состоящей из восьми антенных элементов, передающей антенны, восьми четырехканальных приемных модулей, модуля цифрового формирования и обработки сигналов, содержащего восемь цифровых приемных каналов обработки, передающего модуля и усилителя мощности. Радиолокационная станция и оптико-электронная система смонтированы на одном подъемно-мачтовом устройстве. 3 з.п. ф-лы, 5 ил.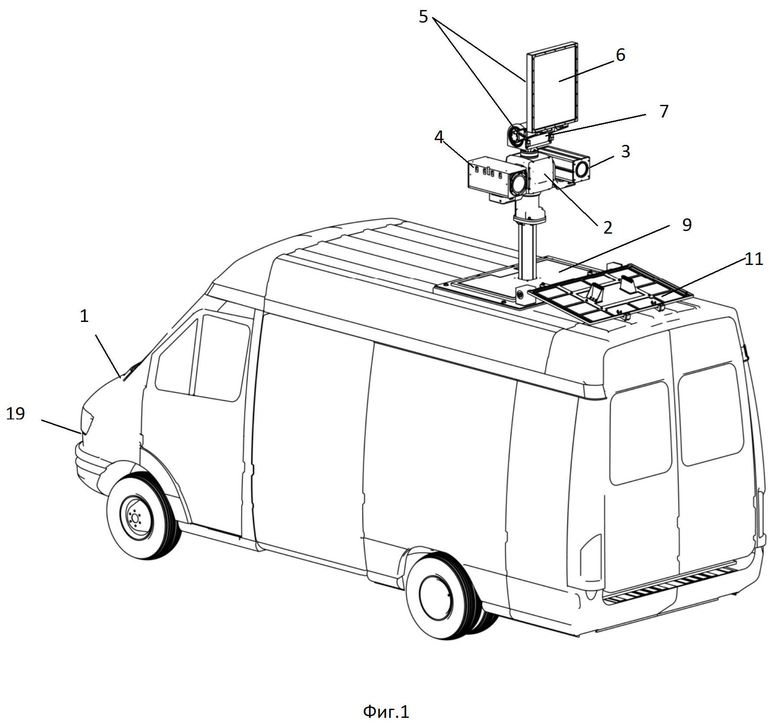
1. Мобильный комплекс для обнаружения воздушных объектов, включающий систему электропитания и оптико-электронную систему, содержащую видеокамеру с тепловизором и установленную на опорно-поворотном устройстве, закрепленном на подъемно-мачтовом приспособлении и выполненном с возможностью вращения на 360 градусов в азимутальной плоскости, а также с возможностью перемещения по углу места, отличающийся тем, что в верхней части подъемно-мачтового устройства размещена радиолокационная станция, состоящая из цифровой приемной активной фазированной антенной решетки, состоящей из восьми антенных элементов, передающей антенны, восьми четырехканальных приемных модулей, модуля цифрового формирования и обработки сигналов, передающего модуля и усилителя мощности, причем модуль цифрового формирования и обработки сигналов содержит также восемь цифровых приемных каналов обработки, а радиолокационная станция указанного содержания и оптико-электронная система смонтированы на одном подъемно-мачтовом устройстве для их совместной работы.
2. Мобильный комплекс по п. 1, отличающийся тем, что он выполнен с возможностью размещения подъемно-мачтового приспособления в походном положении внутри транспортного средства.
3. Мобильный комплекс по п. 1, отличающийся тем, что он выполнен с возможностью передачи видеоинформации внешним потребителям.
4. Мобильный комплекс по п. 1, отличающийся тем, что в его состав включена система ночного вождения, состоящая из неохлаждаемого тепловизора, установленного в переднем бампере транспортного средства, и видеомонитора, установленного в поле зрения водителя транспортного средства.
| НАЗЕМНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2013 |
|
RU2530185C1 |
| Мобильный комплекс мониторинга открытых участков местности | 2019 |
|
RU2708802C1 |
| ДОБЫЧИНА Е.М., МАЛАХОВ Р.Ю | |||
| Цифровой приемо-передающий модуль активной фазированной антенной решетки // Научный Вестник МГТУ ГА, 2014 г., N209, сс | |||
| Аппарат для испытания прессованных хлебопекарных дрожжей | 1921 |
|
SU117A1 |
| Устройство для выколачивания пыли из тряпья | 1955 |
|
SU101554A1 |
| ТУРКИЧЕВА С.В | |||
| Разработка и конструирование четырехканального приемопередающего модуля активной фазированной | |||

