Изобретение относится к области контроля технологических параметров добывающих скважин и может быть использовано для дистанционного контроля динамического уровня жидкости в скважинах, оборудованных насосными установками.
Наиболее близким по технической сущности к предлагаемому решению является акустический способ контроля технического состояния электрической центробежной насосной установки [1], основанный на измерении информативного параметра, характеризующего работу установки, при котором в затрубном пространстве на устье скважины выделяют перепады давления, преобразуют их в симметричные противофазные сигналы переменного тока, фильтруют от помех, усиливают с подавлением синфазных сигналов и электромагнитных фоновых наводок и регистрируют на первичном документе, который расшифровывают, а подавление фоновых наводок производят путем режекции основной гармоники на частоте промышленной сети и в качестве информативного параметра используют интенсивность вибраций установки, которую определяют по среднему значению зарегистрированного сигнала и коэффициенту усиления, и измеряет высоту газового столба в скважине, а по высоте столба вычисляют затухание акустического сигнала, причем определение интенсивности производят с учетом затухания.
Недостатком этого способа является низкая технологичность процедуры контроля и его трудоемкость.
Целью предлагаемого изобретения является повышение технологичности процедуры контроля и снижение его трудоемкости.
Достигается цель тем, что прямой акустический зондирующий сигнал формируют путем изменения режима работы установки и производят последовательную передачу и регистрацию эхограмм изменения режима, полученные эхограммы сравнивают и определяют уровень жидкости, причем режим работы установки изменяют на заданный период времени, по окончании которого устанавливают прежний режим, а длительность периода выбирают из условия затухания отраженных сигналов до уровня акустических шумов скважины и регистрацию эхограмм проводят до получения последовательности отраженных сигналов с равными интервалами времени между ними и одинаковыми начальными фазами.
В частности, изменение режима работы установки производят путем: отключения или запуска насоса; создания перепада давления на приеме или выкиде насоса; стравливания газа из затрубного пространства скважины в выкидной коллектор или в насосно-компрессорные трубы; скачкообразного изменения электрических параметров цепи питания погружного электродвигателя.
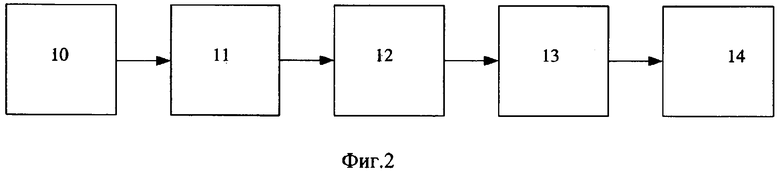
Техническая сущность заявляемого решения может быть пояснена на примере устройства, реализующего способ, структурная схема которого приведена на Фиг.1, где условно обозначены: 1 - датчик, 2 - акустический приемник, 3 - блок управления скважинным терминалом, 4, 6 - приемопередающий узел, 5 - канал связи, 7 - блок управления диспетчерским пунктом, 8 - блок памяти, 9 - исполнительный элемент.
Датчик 1, акустический приемник 2, блок управления 3, приемопередающий узел 4 и исполнительный элемент 9 представляют собой скважинный терминал, установленный на месторождении. При этом датчик 1 стационарно устанавливают на устье скважины, например, путем подсоединения к патрубку для эхолотирования и соединяют с затрубным пространством скважины путем открытия задвижки. Сигнальный выход датчика 1 соединяют двухжильным кабелем с входом акустического приемника 2, установленного на станции управления скважиной. Выход акустического приемника 2 соединяют с входом блока управления 3, который совместно с приемопередающим узлом 4 представляет собой скважинный контроллер, входящий в состав оборудования станции управления скважиной, в том числе и исполнительный элемент 9.
Приемопередающий узел 6, блок управления диспетчерским пунктом 7 и блок памяти 8 представляют собой центральный контроллер, входящий в состав оборудования диспетчерского пункта системы телемеханики.
Скважинный терминал и диспетчерский пункт соединены между собой каналом связи 5, который позволяет производить передачу сигналов поочередно в двух направлениях - от диспетчерского пункта к скважинному терминалу и наоборот. Управление скважинным терминалом производит диспетчерский пункт с возможностью работы в ручном и автоматическом режимах.
В автоматическом режиме контроль уровня жидкости в скважине производят с заданной периодичностью, например один раз в сутки.
При этом устройство работает следующим образом. От блока управления диспетчерским пунктом 7 через приемопередающий узел 6 поступает команда на изменение режима работы установки, например, в виде кодовой последовательности сигналов.
Приемопередающий узел 6 производит передачу кодовых сигналов по каналу связи 5 на приемопередающий узел 4 скважинного терминала. Сигналы с выхода приемопередающего узла 4 поступают на вход блока управления скважинным терминалом 3, который декодирует принятую кодовую последовательность и вырабатывает команду на изменение режима работы установки, например, путем отключения питания погружного электродвигателя.
Сигнал с выхода блока управления 3 поступает на вход исполнительного элемента 9, который производит отключение установки на заданный период времени, например на 30 с.
Погружной электродвигатель и соединенный с ним через вал центробежный насос останавливают, что создает на приеме насоса перепад давления в столбе жидкости.
Перепад давления создает продольную акустическую волну, которая распространяется по столбу жидкости, воздействует на газовый столб затрубного пространства скважины и создает в нем акустический импульс в виде перепада давления, который распространяется от границы раздела сред "газ-жидкость" до устья скважины, отражается от него и возвращается обратно. Далее процесс повторяется с последующим его затуханием.
Созданный продольной волной акустический импульс представляет собой зондирующий сигнал, а его отражения от устья скважины - обратные сигналы.
При этом зондирующий сигнал проходит путь, численно равный высоте газового столба в скважине, а отраженные сигналы проходят путь, численно равный двойной высоте газового столба.
Зондирующий сигнал воздействует на датчик 1, например пьезокерамический, и создает на его обкладках электрический сигнал в виде импульса.
Электрический сигнал с выхода датчика 1 поступает через соединительный кабель на вход акустического приемника 2, структурная схема которого приведена на Фиг.2, где условно обозначены: 10 - симметрирующий узел, 11 - ограничитель сигналов, 12 - усилитель, 13 - подавитель фоновых наводок, 14 - фильтр нижних частот.
Симметрирующий узел 10 производит преобразование входного сигнала в два симметричных противофазных сигнала относительно общего провода. С выхода симметрирующего узла 10 сигналы поступают на вход ограничителя сигналов 11, выполненного, например, в виде логарифмического компрессора. Ограничитель сигналов 11 производит плавное ограничение сигналов с высоким уровнем и передает без искажения сигналы с низким уровнем.
С выхода ограничителя 11 сигналы поступают на вход усилителя 12, который производит усиление симметричных противофазных сигналов и подавляет синфазные составляющие входных сигналов, обусловленные воздействием электромагнитных наводок.
С выхода усилителя 12 сигнал поступает на вход подавителя фоновых наводок 13, выполненного, например, в виде режекторного фильтра, настроенного на частоту промышленной сети.
С выхода подавителя фоновых наводок 13 сигнал поступает на вход фильтра нижних частот 14, который производит подавление высокочастотных составляющих сигнала, обусловленных скважинными шумами.
Усиленный и окончательно отфильтрованный сигнал с выхода акустического приемника 2 поступает на вход блока управления скважинным терминалом 3.
Блок управления 3 включает в себя преобразователь аналогового сигнала в цифровой код (АЦП), кодирующий узел, который преобразует параллельный цифровой код с выхода АЦП в последовательность кодовых сигналов, декодирующий узел, преобразующий принятую по каналу связи последовательность импульсов в электрические управляющие сигналы, таймер и управляющий узел.
Блок управления 3 в исходном состоянии работает в режиме приема команд от диспетчерского пункта. При поступлении с диспетчерского пункта команды на отключение установки блок управления 3 подает на вход приемопередающего узла 4 последовательность кодовых сигналов, которая с выхода приемопередающего узла 4 поступает по каналу связи 5 на вход приемопередающего узла 6.
С выхода приемопередающего узла 6 последовательность кодовых сигналов поступает на вход блока управления диспетчерским пунктом 7, который декодирует принятую последовательность и преобразует ее в параллельный цифровой код и записывает в блок памяти 8.
Емкость блока памяти 8 выбирают из условия хранения двух эхограмм, каждая из которых может содержать, например, три импульса с интервалами времени между ними, равными 10 с, при 8-разрядном параллельном цифровом коде и частоте дискретизации 50 Гц, минимальном значении скорости звука в скважине 300 м/с и погрешности отсчета интервала 6 м.
Для выбранного примера емкость памяти составляет 24 килобита на две эхограммы или 3 килобайта.
После записи в блок памяти 8 эхограммы отключения и по окончании периода отключения установки блок управления скважинным терминалом 3 вырабатывает команду запуска установки путем подачи управляющего сигнала на исполнительный элемент 9, который запускает установку путем подачи напряжения питания на погружной электродвигатель.
Работа устройства в этом случае происходит аналогично предыдущему, за исключением того, что зондирующий сигнал формируют путем запуска установки.
Реализация способа на месторождениях, оборудованных каналами телемеханики и станциями управления скважинами с контроллерами, сводится к установке дополнительного оборудования и корректировке программного обеспечения.
Дополнительное оборудование в этом случае включает в себя установку на каждой скважине датчика, конструктивно выполненного в виде серийного волномера, соединительного кабеля и акустического приемника.
Высокая технологичность дистанционного контроля уровня жидкости обусловлена тем обстоятельством, что все работы по контролю выполняют на диспетчерском пункте без выезда на месторождение и без прогрева задвижек на патрубках для эхолотирования в зимний период времени.
Достоверность контроля по данному способу обеспечивают регистрацией на эхограммах, например, трех сигналов с равными промежутками между ними и одинаковыми начальными фазами, а также методом сравнения эхограмм остановки и запуска скважины.
Способ может быть применен для скважин, оборудованных струйными насосами, станциями управления и каналами телемеханики. Устройство для реализации способа в этом случае аналогично рассмотренному.
Способ может быть применен также для дистанционного контроля технического состояния электрической центробежной насосной установки по уровню акустических шумов и вибраций, создаваемых в процессе работы установки. В этом случае периодический контроль производят путем регистрации шумов в затрубном пространстве скважины без изменения режима работы установки.
Зарегистрированные акустические шумы и вибрации установки сравнивают по эхограммам относительно предыдущих значений. В случае увеличения относительного уровня шумов до определенного значения, а также при изменении спектральных характеристик акустических шумов и вибраций, проявляющихся в виде дополнительных составляющих в инфранизкочастотном диапазоне, увеличивают периодичность контроля, а при дальнейшем их увеличении производят исследование скважины по применяемым на месторождениях методикам и принимают решение о дальнейшей эксплуатации установки.
В итоге предлагаемый способ позволяет осуществлять дистанционный контроль уровня жидкости в скважине с насосной установкой.
Источники информации
1. Акустический способ контроля технического состояния электрической центробежной насосной установки. Патент RU №2152510, кл. Е 21 В 43/00.
Изобретение относится к области контроля технологических параметров добывающих скважин и может быть использовано для дистанционного контроля динамического уровня жидкости в скважинах, оборудованных насосными установками. По предлагаемому способу акустический зондирующий сигнал поочередно формируют путем изменения режима работы установки, а на устье скважины выделяют перепады давления в затрубном пространстве, преобразуют их в симметричные противофазные сигналы, которые фильтруют от помех, усиливают с подавлением синфазных составляющих и электромагнитных фоновых наводок и усиленные сигналы преобразуют в кодовую последовательность, которую передают по каналу связи на диспетчерский пункт, декодируют и регистрируют в виде эхограмм изменения режима установки. Запись эхограмм проводят до получения последовательности отраженных сигналов с равными интервалами времени между ними и одинаковыми начальными фазами. Изменение режима установки производят на период времени, длительность которого выбирают из условия затухания отраженных сигналов до уровня акустических шумов скважины, а по окончании заданного периода времени устанавливают прежний режим, полученные эхограммы сравнивают и определяют уровень жидкости. Способ позволяет повысить технологичность процедуры контроля и уменьшить ее трудоемкость. 4 з.п. ф-лы, 2 ил.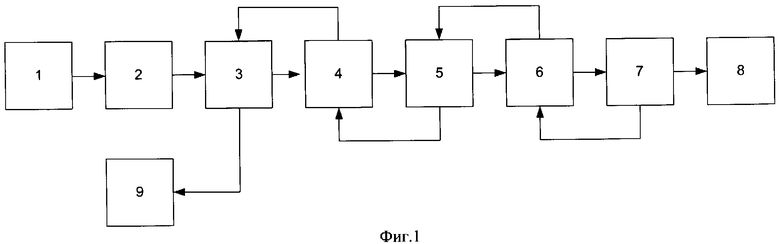
| АКУСТИЧЕСКИЙ СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРИЧЕСКОЙ ЦЕНТРОБЕЖНОЙ НАСОСНОЙ УСТАНОВКИ | 1998 |
|
RU2152510C1 |
| БЛОЧНАЯ ИНЖЕКЦИОННАЯ ГОРЕЛКА С ДИАФРАГМОЙ | 2002 |
|
RU2234639C2 |
| СПОСОБ УПРАВЛЕНИЯ ГЛУБИННО-НАСОСНОЙ УСТАНОВКОЙ НЕФТЯНОЙ СКВАЖИНЫ | 2003 |
|
RU2242587C1 |
| УСТРОЙСТВО ДЛЯ ОПЕРАТИВНОГО УПРАВЛЕНИЯ РЕЖИМАМИ РАБОТЫ | 1996 |
|
RU2140524C1 |
| СПОСОБ УПРАВЛЕНИЯ ГЛУБИННО-НАСОСНОЙ УСТАНОВКОЙ НЕФТЯНОЙ СКВАЖИНЫ | 1996 |
|
RU2118443C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ В СКВАЖИНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232267C2 |
| Способ определения уровня жидкости в затрубном пространстве глубинно-насосной скважины | 1986 |
|
SU1346774A1 |
| US 4793178 A, 27.12.1988 | |||
| US 4934186 A, 19.06.1990. | |||

