Изобретение относится к медицинской и педагогической диагностике и может быть использовано для расширения ее возможностей, повышения объективности и точности оценивания тотальной и локальной гибкости тела человека при выполнении наклонов вперед, например, для нужд возрастной физиологии, ортопедии, лечебной и оздоровительной физкультуры, спорта высших достижений и профессионального отбора.
Специалисты-эксперты из 15 стран Европы в числе тестов, которые должны быть обязательно включены в общеевропейскую программу оценки физической пригодности человека "EUROFIT", на втором месте указали тест для определения гибкости: "наклон вперед" (НВ) [1].
Существует два аналогичных варианта теста НВ: стоя и сидя [2-9]. Сходство в том, что выполняется единое движение, и результат измеряют в линейных мерах (сантиметры - см, дюймы - in) по расстоянию от кончиков пальцев рук до уровня условного нуля (УУН). В отечественной практике, результат может иметь отрицательный или положительный знак, так как кисти тестируемого могут быть выше, или ниже УУН (точки касания стоп с опорной площадкой измерительного устройства).
В зарубежной практике все результаты теста имеют положительный знак, потому что УУН приближен к тестируемому на 15 дюймов (38,1 см).
Известно, что существенным недостатком теста является то, что на результат оказывают значительное влияние особенности телосложения, которые рекомендовано учитывать при оценивании гибкости [10-17], но тест продолжают применять в первозданном виде и даже приводят его для характеристики гибкости позвоночного столба [4].
Но это не совсем правомерно, так как: во-первых, НВ это предельное вытягивание рук и туловища при сгибании (С) тела, а не позвоночного столба (ПС), причем С - одно из нескольких движений, которые могут выполняться в шейном, грудном и поясничном отделах вокруг 3 осей вращения: поперечной (сгибание-разгибание); переднезадней (наклоны вправо-влево); вертикальной (повороты направо - налево), и подвижность ПС принято определять гониометрическим способом [18, 19]; во-вторых, гибкость - это, прежде всего, эластические свойства мышц и связок, строение суставов и центрально-нервная регуляция тонуса мышц [7].
Вышесказанное обосновывает актуальность нового способа.
Наиболее близким техническим решением является «способ определения гибкости тела человека» АС №1709995, согласно которому для повышения точности определения гибкости тела учитывают пропорции телосложения человека.
Способ осуществляется следующим образом, сначала измеряют: рост стоя; рост сидя; совокупную длину рук и туловища в положении сидя, вычисляют длину ног испытуемого, определяют НВ и по формуле рассчитывают индекс гибкости:
где: i - индекс гибкости (%); Rст - рост стоя (см); rс - рост сидя (см); L - совокупная длина рук и туловища сидя (см); ±l - величина НВ (см).
Индекс гибкости i определяют по отношению совокупной длины рук и туловища при выполнении наклона вперед (Rст-rс)±l к совокупной длине рук и туловища до его выполнения L и умножают на 100%.
Однако, как показали наши исследования, недостатком прототипа является то, что параметр величины L не всегда объективно отражает особенности телосложения людей, не всегда соответствует истинным длинотным размерам тела, что искажает индекс и приводит к ошибочной оценке гибкости. Например, у рослого человека с длинными руками и туловищем величина L может быть меньше, чем у невысокого, но размеры скелета тела не могут значительно изменяться только потому, что человек из антропометрической стойки перешел к позе тестирования.
Таким образом, прототип нуждается в существенных поправках.
L - это суммарный показатель, чтобы точно определить его параметр, необходимо провести объективный анализ всех составных элементов и теоретически обосновать то, что учитываются все особенности строения тела, которые могут оказать существенное влияние на итоговый результат.
Анатомический анализ показывает, что совокупная длина рук и туловища сидя L (далее - Lc) - состоит из трех элементов:
1. Длина руки (Др) или свободной верхней конечности (СВК);
2. Длина туловища до акромиальной точки (Дтакр);
3. Соединение руки с туловищем или пояс верхней конечности (ПВК), функцией которого (ФПВК) является увеличение амплитуды движений руки [18].
Таким образом, получаем уравнение №1: Lc=Др+Дтакр+ФПВК.
Сумма длинотных размеров скелета руки и туловища (Др+Дтакр) - величина относительно постоянная и не зависимая от субъективной воли тестируемого (как и все антропометрические параметры), то обозначим ее как: базовый параметр (Lб), тогда для определения величины ФПВК можно вывести неравенство: Lб≠Lс, или, Lб≠Др+Дтакр+ФПВК.
Нами выявлено 3 варианта значений Lс по отношению к Lб, которые характеризуют основные закономерности, не учтенные в прототипе.
1. Lс:Lб>1,0 - если Lc>Lб, то ФПВК>0, и, если ФПВК>0, то Lc>Lб;
2. Lс:Lб=1,0 - если Lc=Lб, то ФПВК=0, и, если ФПВК=0, то Lс=Lб;
3. Lс:Lб<1,0 - если Lc<Lб, то ФПВК<0, и, если ФПВК<0, то Lc<Lб.
Установлено, что ФПВК не только увеличивает, но и ограничивает амплитуду (размах) движений рук при вытягивании, поэтому величина может иметь как положительное, так и отрицательное значение (±ФПВК), таким образом, уравнение №1 должно иметь вид: Lc=Lб±ФПВК.
Обозначив слагаемые уравнения как признаки «А» и «В», каждый из которых имеет три значения, мы выявили 9 вариантов сочетаний двух признаков, которые представлены в Таблице 1.
Варианты сочетаний признаков А и В
Пример 1: Параметры высокого человека с признаками А3 (max) и В1 (min) могут иметь выражение Lc(1)<Lб(1), то есть истинные размеры тела завуалированы и фактически не учитываются: Lc(1)=Др+Дтакр - ФПВК. При Lc<Lб значение индекса и оценка гибкости по прототипу завышена.
Пример 2: Параметры невысокого человека с признаками А1 (min) и В3 (max) могут иметь выражение Lc(2)>Lб(2), то есть истинные размеры тела превышены: Lc(2)=Др+Дтакр+ФПВК.
При Lc>Lб значение индекса и оценка гибкости по прототипу - занижена.
Сравнение ростовых параметров людей разного роста имеет вид: А3>А1, или, Lб(1)>Lб(2), но величины Lc могут иметь обратное выражение Lc(1)≤Lc(2), таким образом, параметры Lc высокого человека с признаками А3Б1 могут быть меньше, или равны Lc невысокого человека с признаками А1Б3, или LА3Б1≤LA1Б3, чего не должно быть, так как это противоречит их ростовым параметрам, ведь: А3>А1 или Lб(1)>Lб(2).
Таким образом, если в первом и во втором случае выявлено два противоположных неравенства: Lc(1)<Lб(1) и Lc(2)>Lб(2), то Lc не может являться стандартизирующей величиной, потому что условия определения ее параметров не одинаковы для крайних вариантов сочетания признаков, следовательно: индексы гибкости разных людей нельзя сравнивать.
Чтобы условия были едиными, нужно так стандартизировать определение параметров составных элементов величины Lc, чтобы ее значение всегда превышало Lб на постоянную величину коэффициента (К).
Для обоснования величины коэффициента (К), были проведены исследования в тех видах спорта, где к максимальному уровню развития гибкости предъявляются самые высокие требования (художественная гимнастика, плавание). Результаты тестирования спортсменов высшей квалификации (МС; КМС) показали, что величина Lc превышает Lб в 1,11 раза, поэтому чтобы исключить возможные недочеты, мы установили параметры коэффициента с некоторым запасом: К=1,12.
До настоящего времени не выявлено технического решения, в котором вышеназванные противоречия и недостатки были бы учтены.
Целью изобретения является повышение объективности, точности, надежности и расширение диагностических возможностей способа определения тотальной и локальной гибкости тела человека, посредством учета линейных размеров скелета тела человека, отражающих истинные особенности телосложения, длины руки, длины туловища до акромиальной точки, сумма которых принимается за базовый параметр, определения актуального уровня функции пояса верхних конечностей, введения коэффициента К=1,12 для вычисления максимального ресурса линейных размеров рук и туловища, измерения величин 3 наклонов вперед (на две ноги, на правую и на левую ногу) и определения асимметрии локальной гибкости тела человека.
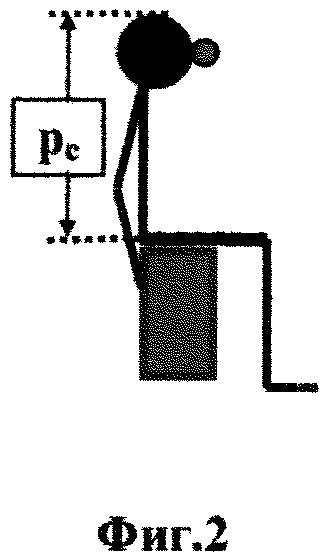
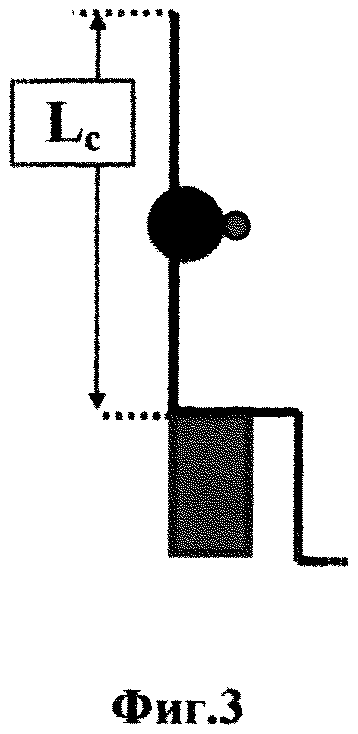
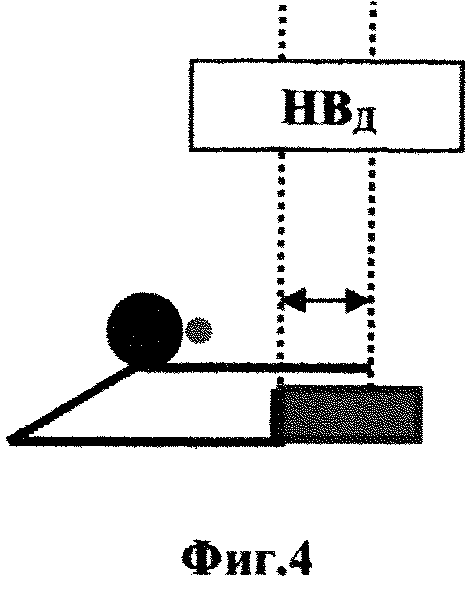
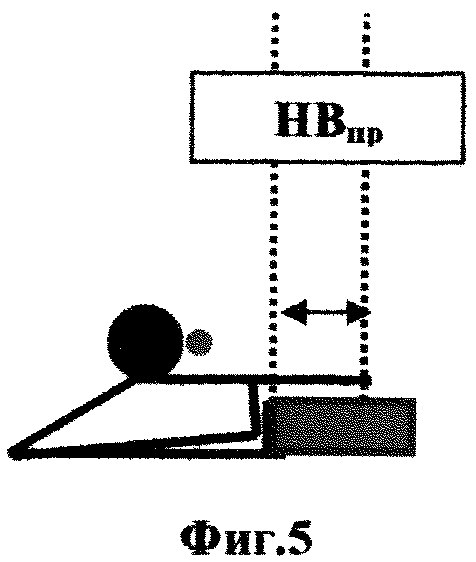
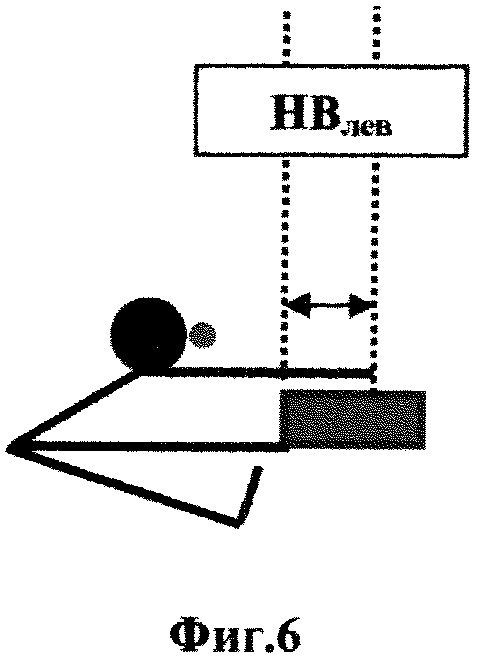
Поставленная цель достигается тем, что в известном способе определения гибкости тела человека (АС №1709995) с учетом роста стоя (Рст) [Фиг.1], роста сидя (рс) [Фиг.2], по разности которых вычисляют длину ног (Дн=Рст-рс), совокупной длины рук и туловища (Lc) [Фиг.3], величины наклона вперед на две ноги (НВД) [Фиг.4], дополнительно измеряют: акромиальную (Акр) и пальцевую точки (Пал) [Фиг.1], по разности которых вычисляют длину руки (Др=Акр-Пал); вычисляют длину туловища до акромиальной точки (Дтакр=Акр-Рст+рс), затем выполняют три наклона вперед: на две ноги (НВД) [Фиг.4]; на правую ногу (НВпр) [Фиг.5], другая расслаблена и на левую ногу (НВлев) [Фиг.6], после чего определяют величину совокупной длины рук и туловища при выполнении каждого из наклонов, которую получают суммированием размеров двух частей ее проекции (длина ног ± величина наклона), причем параметры одной части (Рст-рс) носят постоянный характер для всех трех наклонов, а параметры другой части (НВД; НВпр; НВлев) имеют переменный характер, или:
1. LНВД=(Рст-рс)±НВД;
2. LНВпр=(Рст-рс)±НВпр;
3. LНВлев=(Рст-рс)±НВлев.
Затем по сумме линейных размеров двух звеньев тела (длина руки + длина туловища до акромиальной точки) определяют величину базового параметра Lб, актуальный уровень функции ПВК (АУФПВК), который вычисляют по процентному соотношению Lc к Lб и по критериям оценок судят об АУФПВК, и, умножая величину Lб на коэффициент К=1,12, вычисляют максимальный ресурс совокупной длины рук и туловища (LMP).
Тотальную гибкость тела человека определяют по отношению совокупной длины рук и туловища при выполнении НВ на две ноги к максимальному ресурсу совокупной длины рук и туловища, и по степени их соответствия, выраженному в процентах, судят об уровне тотальной гибкости тела человека при выполнении НВД.
Локальную гибкость или индекс эластичности мышечно-связочного аппарата (ИЭМСА) задней поверхности правой стороны (ИЭпр) тела определяют также отношением совокупной длины рук и туловища при выполнении НВ на правую ногу (НВпр) к LMP, и также по процентному выражению степени их соответствия судят об уровне ЭМСА задней поверхности правой стороны тела.
Точно так же определяют ИЭМСА для левой стороны тела (ИЭлев).
Функциональную асимметрию ЭМСА тела человека определяют по разности значений индексов ЭМСА правой и левой сторон тела.
Способ осуществляется следующим образом.
Перед определением тотальной гибкости тела человека (величины наклона вперед на две ноги) [Фиг.4], локальной гибкости (величин наклонов вперед на правую и на левую ногу, другая расслаблена) [Фиг.5, 6] и вычисления степени ее асимметрии, до определения актуального уровня функции ПВК, сначала измеряют: высоту над полом верхушечной, акромиальной и пальцевой точек; рост сидя; совокупную длину рук и туловища в положении сидя [Фиг.1, 2, 3], затем вычисляют: длину ног; длину рук; длину туловища до акромиальной точки; величину базового параметра и максимального наличного ресурса совокупной длины рук и туловища испытуемого.
Рост стоя (Рст) [Фиг.1] определяют с помощью стандартного ростомера, или штангового антропометра Мартина, по высоте над полом верхушечной точки (Vertex) - самой высокой точки, расположенной в верхней части головы в средне сагиттальной плоскости, когда голова находится во франкфуртской горизонтали, которая является прямой линией, соединяющей самую нижнюю точку нижнего края правой глазницы и самую верхнюю точку верхнего края слухового прохода.
Акромиальная точка (Acromial) (Акр) - наиболее выступающая в сторону точка на акромиальном отростке лопатки [Фиг.1].
Пальцевая точка (Dactylion) (Пал) - наиболее низко расположенная точка мякоти дистальной фаланги III пальца [Фиг.1].
Рост сидя (рс) определяют с помощью тех же приспособлений, как и рост стоя, по верхушечной точке, но в положении сидя, при этом испытуемый должен касаться спиной и тазом измерительной шкалы ростомера (антропометра) [Фиг.1].
Совокупную длину рук и туловища сидя (Lс) измеряют в положении сидя, при этом испытуемый должен касаться спиной и тазом измерительной шкалы ростомера (антропометра), выполняя максимально возможное сгибание плечевых и разгибание локтевых суставов, вытягивает руки вверх, при этом необходимо проконтролировать, полностью ли реализована подвижность указанных суставов, для этого нужно взять руки тестируемого в области лучезапястных суставов и слегка вытянуть вверх, одновременно выравнивая высоту пальцевых точек (Пал) обеих рук, и по линии, условно проведенной между ними, определяют Lс [Фиг.3].
Длину ног испытуемого (Дн) определяют по разности показателей роста стоя и роста сидя (Рст-рс).
Длину рук (Др) определяют или прямым измерением расстояния от акромиальной точки до пальцевой, или по разности высот этих точек над полом (Акр-Пал).
Длину туловища до акромиальной точки (Дтакр) определяют по разности показателей высоты акромиальной точки над полом с длиной ног (Акр-Pст+pс).
Величину базового параметра совокупной длины рук и туловища (Lб) определяют по сумме линейных размеров двух звеньев тела: длина руки + длина туловища до акромиальной точки (Др+Дтакр).
Величину максимального ресурса совокупной длины рук и туловища при вытягивании (LMP) определяют умножением коэффициента К=1,12 на величину базового параметра совокупной длины рук и туловища (K·Lб), или, LMP=(Др+Акр-Pст+Рс)·К.
Затем испытуемый встает на платформу измерительного устройства согласно первому варианту тестирования (4), или садится напротив него согласно второму варианту (6), и выполняет наклон вперед, после чего определяют совокупную длину рук и туловища при выполнении НВ, которую получают суммированием длины ног (Дн) и величины наклона вперед на две ноги (НВД) [Фиг.4]: LНВД=(Pст-Рс±НВД).
Затем испытуемый возвращается в исходное положения стоя (сидя), переносит вес тела на правую ногу и вновь выполняет наклон вперед на правую ногу, левая расслаблена, после чего снова определяют совокупную длину рук и туловища при выполнении наклона вперед на правую ногу (НВпр) [Фиг.5], которую также как и в первом случае получают суммированием соответствующих величин: LНВпр=(Рст-Рс±НВпр).
Затем процедура повторяется для левой ноги (НВлев) [Фиг.6].
LНВлев=(Pст=pс)±НВлев
Затем определяют актуальный уровень функции пояса верхних конечностей (АУФПВК), по отношению величины совокупной длины рук и туловища в положении сидя (Lc) к ее базовому параметру (Lб), которое выражают в процентах, и по степени соответствия этого результата критериям оценок судят об актуальном уровне функции ПВК.
Затем определяют максимальный ресурс совокупной длины рук и туловища (LМР) умножением коэффициента К=1,12 на величину базового параметра: LМР=K·Lб.
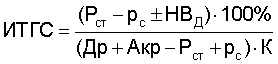
Индекс тотальной гибкости тела человека при выполнении сгибания (ИТГТЧсг сокращенно: ИТГС), определяют по отношению совокупной длины рук и туловища при выполнении наклона вперед на две ноги LНВД к максимальному ресурсу совокупной длины рук и туловища LMP и умножают на 100%.
где: LНВД=(Pст-рс±НВД); LМР=(Др+Акр-Рст+рс)·К, и тогда формула приобретает следующий вид
где: ИТГС - индекс тотальной гибкости тела человека при выполнении сгибания; Pст - рост стоя; рс - рост сидя; ±НВД - величина наклона вперед на две ноги, положительная (+), если кончики пальцев расположены ниже (дальше) уровня стоп, отрицательная (-), если до; Акр - высота акромиальной точки; К - коэффициент 1,12.
Локальную гибкость или индексы ЭМСА задней поверхности правой и левой сторон тела (ИЭпр и ИЭлев) определяют по той же самой формуле, заменяя в числителе показатель НВД на соответствующие величины наклонов вперед на правую и левую ногу (НВпр и НВлев).
Асимметрию локальной гибкости или эластичности мышечно-связочного аппарата задней поверхности правой и левой сторон тела человека определяют по разности индексов ИЭпр-ИЭлев.
Примеры использования способа.
Для наглядности диагностических возможностей способа мы приводим 10 примеров (Табл.2), которые отражают наиболее типичные проблемы, связанные с определением гибкости у людей и раскрывают суть принципиальных отличий предлагаемого решения от аналога и прототипа. Возрастной диапазон в группе составляет от 3,9 до 25 лет, но особенности телосложения проявляются уже в младенчестве и сохраняются до глубокой старости, поэтому наш способ может быть рекомендован для определения гибкости людей всех возрастов.
В строках 10, 11 и 12 для каждого способа определения гибкости указан «Рейтинг» результатов в группе, необходимо заметить, что 100% совпадения нет. Например, Рейтинги результатов по НВ для девочек 3,9 и 6 лет (столбцы 1 и 2) отражают общепринятую логику, основанную на поверхностном, но очевидном, факте неравенства величин НВД(7>2), которое дает основание для вывода: девочка 6 лет обладает более высоким уровнем гибкости, чем девочка 3,9 лет.
Сравнение трех способов определения гибкости тела человека при выполнении наклона вперед
ПВК (%)
Поверхностная и необъективная логика нашла свое выражение в критериях оценок уровня развития гибкости, которые предлагают Ж.К.Холодов и B.C.Кузнецов (2001, С.162), например: величина НВД=2 см может оцениваться как «очень низкая», так как параметры оценки «низкий уровень» равны 5-9 см; величина НВД=7 см оценивается как «средняя», соответственно рейтинги результатов по НВД: №8 (Б-я) и №9-10 (Л-а).
Если уровень гибкости детей оценивать по формуле прототипа, то существенная разница устраняется, так как величины индексов гибкости (i) практически равны, хотя неравенство, не столь очевидное и выраженное как в первом случае, сохраняется: iБ-я(58,9%)>iЛ-a(58,7%). По прототипу рейтинги индексов гибкости девочек составляют: №9 (Б-я) и №10 (Л-а).
В столбце 9 Таблицы 2 приведены результаты мальчика Д-к (14 лет, плавание), который продемонстрировал такой же минимальный результат величины НВД (2 см) как и девочка 3,9 л (Л-а), но если в первом случае их рейтинги совпали полностью (№9-10), то по второму способу оценки рейтинг мальчика занял уже восьмую позицию, и превзошел даже уровень девочки 6 лет (Б-я): iД-к(62,2%)>iБ-я(58,9%).
Но, если для оценивания гибкости использовать предлагаемый нами способ, то используя формулу
 получаем:
получаем:
для девочки 3,9 лет (Л-а),
 (рейтинг №9);
(рейтинг №9);
для девочки 6 лет (Б-я),
 (рейтинг №10);
(рейтинг №10);
для мальчика 14 лет (Д-к), занимающегося плаванием
 (рейтинг №7)
(рейтинг №7)
Изменение рейтингов подчеркивает то, что различия трех способов определения гибкости весьма существенны, поэтому поверхностная и необъективная оценка может быть ошибочна.
Так, например, в столбце 3 и 4 приведены результаты тестирования гимнасток В-а (6 лет) и Я-а (18 лет). Если оценивать гибкость по величинам НВД, то весьма внушительная разность в 11,5 см, является основанием для вывода о том, что уровень гибкости намного выше у гимнастки 18 лет, что на первый взгляд абсолютно логично, ведь по аналогу совершенно очевидно, что HBЯ-а>HBВ-а, и Рейтинг в группе соответственно: №1 и №5, причем оценка по прототипу, не изменяя неравенство, выявленное первым способом (iЯ-а>iВ-а), поднимает рейтинг юной гимнастки на позицию №2.
Предлагаемый способ показывает, что гимнастки обладают почти равным уровнем гибкости, но чуть выше у В-а (6 лет), что и подтверждает сравнение показателей локальной гибкости ИЭ (строки 16 и 17).
Изменение рейтингов отмечено не только у гимнасток, но и у других спортсменов (столбцы: 5 и 6; 9 и 10). Данные 10 строки подчеркивают закономерность: чем выше уровень АУФПВК, тем меньше разность между величинами индексов i (прототип) и ИТГС (предлагаемый способ).
Таким образом, есть все основания для вывода о том, что: введение дополнительных параметров существенно повышает объективность, точность, надежность и расширяет диагностические возможности способа определения тотальной и локальной гибкости тела человека.
Источники информации
1. Bos К. The relevance of fitness tests and fitness programs in european countries - Results from a questionnaire with fitness experts // Int.J. of Physical Education. - 1992. - Vol.28, №2. - P.37-39.
2. Годик М.А. Спортивная метрология: Учеб. для ин-тов физич. культуры. - М.: Физкультура и спорт, 1988. - 192 с.
3. Годик М.А., Бальсевич В.К., Тимошин В.Н. Система общеевропейских тестов для оценки физического состояния человека // Теория и практика физической культуры, 1994. - №5-6. С.24.
4. Дубровский В.И., Федорова В.Н. Биомеханика: Учеб. для сред. и высш. учеб. заведений. - М.: Изд-во ВЛАДОС-ПРЕСС, 2003. - 672 с. - С.462.
5. Зациорский В.М. Основы спортивной метрологии. М.: ФИС. - 1979. - 144 с.
6. Лях В.И. Тесты в физическом воспитании школьников: Пособие для учителя. - М.: ООО "Фирма "Издат-во ACT", 1998. - 272 с.
7. Матвеев Л.П. Теория и методика физической культуры: 1991. - 543 с.
8. Степаненкова Э.Я. Теория и методика физического воспитания и развития ребенка: Учеб. пособие для студ. высш. пед. учеб. заведений. - М.: Изд. центр "Академия", 2001. - 368 с.
9. Холодов Ж.К., Кузнецов B.C., Теория и методика физического воспитания и спорта: Учеб. пособие для студ. высш. учеб. заведений. - 2-е изд., испр. и доп. - М.: Академия. - 2001. - 480 с.
10. Доленко Ф.Л. Авторское свидетельство СССР №971256, кл. А 61 В 5/10.
11. Донской Д.Д., Зациорский В.М. Биомеханика: 1979. - 264 с. - C.118.
12. Минева М. Индексни оценки на показалите при тестовите за гъвкавост // Въпросы на физическата култура. 1986, №3, С.15-20.
13. Юшин А.Б. Информативность педагогического теста "наклон вперед" // Материалы итоговой науч. конф. 1998 г. СПбНИИФК. - СПб.: СПбНИИФК, 1998. - С.30-31.
14. Юшин А.Б., Юшина И.В., Волков В.Ю. Способ определения гибкости тела человека: Описание изобретения №1709995 // Бюл. №5 от 07.02.1992
15. Alter M.-J. Science of flexibility. 2nd ed. Human Kinetics Publishers, Champaign, 111, с 1996, 392 р
16. Gettman L.K. Fitness Testing // Research Manual for guidelines for Exercises Testing and Prescription. - Philadelphia, 1988. - P.161-170.
17. Ioushin. A. Sit and reach test: How to increase the quality of flexibility diagnostics? 6th Annual Congress of the European College of Sport Science, Perspectives and Profiles-Cologne, 24-28 July 2001. Germany, P.474.
18. Иваницкий М.Ф. Анатомия человека - М.: - 1985. - 544 с. (стр.80).
19. Гамбурцев В.А. Гониометрия человеческого тела. - М.: 1973. - 200 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения гибкости тела человека | 1989 |
|
SU1709995A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФИЗИЧЕСКОЙ ПОДГОТОВЛЕННОСТИ ЧЕЛОВЕКА ПРИ МАССОВЫХ ОБСЛЕДОВАНИЯХ | 2006 |
|
RU2364324C2 |
| Способ определения гибкости тела человека | 1980 |
|
SU971256A1 |
| СПОСОБ ОЦЕНКИ ВЛИЯНИЯ ФИЗИЧЕСКОЙ ТРЕНИРОВКИ НА СПОРТИВНО-ФИЗИЧЕСКОЕ СОСТОЯНИЕ ЧЕЛОВЕКА | 2010 |
|
RU2442527C2 |
| СПОСОБ ОЦЕНКИ ВЛИЯНИЯ ФИЗИЧЕСКОЙ ТРЕНИРОВКИ НА ОРГАНИЗМ ЧЕЛОВЕКА | 1999 |
|
RU2157088C1 |
| СПОСОБ ПРОФИЛАКТИКИ И ЛЕЧЕНИЯ ПРОЯВЛЕНИЙ ПОЯСНИЧНОГО ОСТЕОХОНДРОЗА "ДЕЛЬТА АЛЬТЕРНАТИВА АНДРЕЯ НЕКРАСОВА" | 2006 |
|
RU2289382C1 |
| СПОСОБ ОЦЕНКИ РЕЗЕРВОВ ФИЗИЧЕСКОГО ЗДОРОВЬЯ И РАБОТОСПОСОБНОСТИ НАСЕЛЕНИЯ | 1999 |
|
RU2147208C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ФИЗИЧЕСКОЙ ПОДГОТОВЛЕННОСТИ ЧЕЛОВЕКА | 1991 |
|
RU2015682C1 |
| СПОСОБ ЛЕЧЕБНО-ОЗДОРОВИТЕЛЬНОГО ВОЗДЕЙСТВИЯ НА ЧЕЛОВЕКА | 1998 |
|
RU2121332C1 |
| СПОСОБ ОЦЕНКИ РЕЗЕРВОВ ФИЗИЧЕСКОГО ЗДОРОВЬЯ И РАБОТОСПОСОБНОСТИ НАСЕЛЕНИЯ | 2010 |
|
RU2441580C1 |
Способ относится к области педагогической и медицинской диагностики и прежде всего к возрастной физиологии, ортопедии, лечебной физкультуре, массовому спорту, спорту высших достижений и профессиональному отбору. Гибкость тела человека определяют путем измерения роста стоя (Pст), роста сидя (рс), с последующим вычислением индексов тотальной и локальной гибкости и определением уровня гибкости по степени соответствия полученных значений критериям оценок индекса гибкости. При этом, с целью повышения объективности и точности способа, дополнительно определяют величину наклона вперед на две ноги (±НВД), которая будет положительной (+), если кончики пальцев рук расположены ниже или дальше уровня стоп, или отрицательной (-), если - до стоп, аналогично определяют величины наклонов вперед на правую (±НВпр) и левую ногу (±НВлев); измеряют высоту над полом акромиальной (Акрст) и пальцевой (Пал) точек и по формуле определяют длину рук (Др): Др=Акрст-Пал, где Др - длина рук, вводят коэффициент К=1,12, и затем определяют индекс тотальной гибкости при выполнении сгибания по формуле: 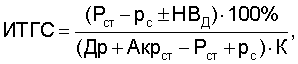 где ИТГС - индекс тотальной гибкости тела человека, Рст - рост стоя, рс - рост сидя, ±НВД - величина наклона вперед на две ноги, Др - длина рук, Акрст - высота акромиальной точки стоя, К - коэффициент 1,12. О локальной гибкости судят по индексам эластичности мышечно-связочного аппарата задней поверхности правой (ИЭпр) и левой (ИЭлев) стороны тела, которые рассчитывают по той же формуле, заменяя в НВД на НВпр и НВлев. Кроме того, определяют гибкость тела человека, которую оценивают по актуальному уровню пояса верхних конечностей (АУФПВК), для чего измеряют совокупную длину рук и туловища сидя (Lc), рост стоя (Рст), рост сидя (рс), высоту над полом акромиальной (Акрст) и пальцевой (Пал) точек, определяют длину рук (Др) по формуле: Др=Акрст - Пал, где Др - длина рук. При этом дополнительно определяют длину туловища до акромиальной точки (Дтакр) по формуле: Дтакр=Акр-Рст+Рс, где Дтакр - длина туловища до акромиальной точки, и величину базового параметра совокупной длины рук и туловища (Lб) по формуле: Lб=Др+Дтакр, где Lб - величина базового параметра совокупной длины рук и туловища. АУФПВК рассчитывают по формуле: АУФПВК=Lс/Lб, где АУФПВК - актуальный уровень пояса верхних конечностей. При величине АУФПВК менее 1,0 определяют низкий уровень гибкости, при значениях, равных 1,0, - средний уровень и при значениях больше 1,0 - высокий уровень. Способ позволяет повысить объективность, точность и надежность оценки тотальной и локальной гибкости тела человека. 2 н.п. ф-лы, 6 ил., 2 табл.
где ИТГС - индекс тотальной гибкости тела человека, Рст - рост стоя, рс - рост сидя, ±НВД - величина наклона вперед на две ноги, Др - длина рук, Акрст - высота акромиальной точки стоя, К - коэффициент 1,12. О локальной гибкости судят по индексам эластичности мышечно-связочного аппарата задней поверхности правой (ИЭпр) и левой (ИЭлев) стороны тела, которые рассчитывают по той же формуле, заменяя в НВД на НВпр и НВлев. Кроме того, определяют гибкость тела человека, которую оценивают по актуальному уровню пояса верхних конечностей (АУФПВК), для чего измеряют совокупную длину рук и туловища сидя (Lc), рост стоя (Рст), рост сидя (рс), высоту над полом акромиальной (Акрст) и пальцевой (Пал) точек, определяют длину рук (Др) по формуле: Др=Акрст - Пал, где Др - длина рук. При этом дополнительно определяют длину туловища до акромиальной точки (Дтакр) по формуле: Дтакр=Акр-Рст+Рс, где Дтакр - длина туловища до акромиальной точки, и величину базового параметра совокупной длины рук и туловища (Lб) по формуле: Lб=Др+Дтакр, где Lб - величина базового параметра совокупной длины рук и туловища. АУФПВК рассчитывают по формуле: АУФПВК=Lс/Lб, где АУФПВК - актуальный уровень пояса верхних конечностей. При величине АУФПВК менее 1,0 определяют низкий уровень гибкости, при значениях, равных 1,0, - средний уровень и при значениях больше 1,0 - высокий уровень. Способ позволяет повысить объективность, точность и надежность оценки тотальной и локальной гибкости тела человека. 2 н.п. ф-лы, 6 ил., 2 табл.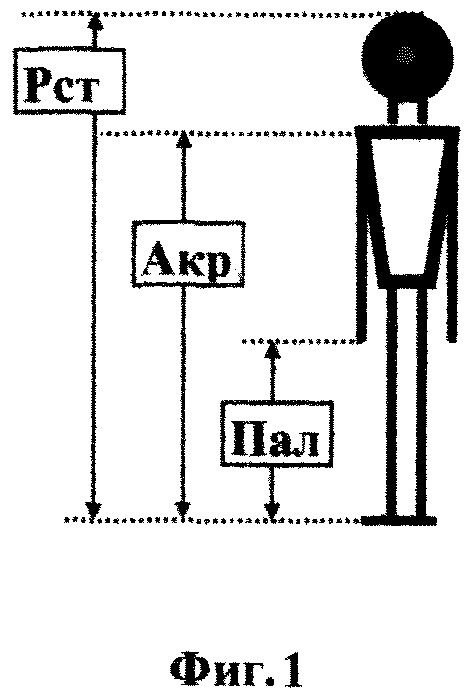
где ИТГС - индекс тотальной гибкости тела человека, Рст - рост стоя, рс - рост сидя, ±НВД - величина наклона вперед на две ноги, Др - длина рук, Акрст - высота акромиальной точки стоя, К - коэффициент 1,12, о локальной гибкости судят по индексам эластичности мышечно-связочного аппарата задней поверхности правой (ИЭпр) и левой (ИЭлев) стороны тела, которые рассчитывают по той же формуле, заменяя в НВД на НВпр и НВлев.
Др=Акрст-Пал,
где Др - длина рук, отличающийся тем, что дополнительно определяют длину туловища до акромиальной точки (Дтакр) по формуле Дтакр=Акр-Рст+Рс, где Дтакр - длина туловища до акромиальной точки, и величину базового параметра совокупной длины рук и туловища (Lб) по формуле Lб=Др+Дтакр, где Lб - величина базового параметра совокупной длины рук и туловища и АУФПВК рассчитывают по формуле АУФПВК=Lс/Lб, где АУФПВК - актуальный уровень пояса верхних конечностей и при величине АУФПВК менее 1,0 определяют низкий уровень гибкости, при значениях равных 1,0 - средний уровень, и при значениях больше 1,0 - высокий уровень.
| Способ определения гибкости тела человека | 1989 |
|
SU1709995A1 |
| Способ определения гибкости тела человека | 1980 |
|
SU971256A1 |
| ДМИТРИЕВ С.В | |||
| Технологизация теории спортивной биомеханики: некоторые тенденции, перспективы и результаты исследований | |||
| II Всероссийская конференция по биомеханике, посвященная памяти Н.А.Борнштейна, 22-25 ноября 1994, г.Нижний Новгород, 1994, с.147-148 | |||
| ЗЕЛИЧЕНОК В.Б | |||
| и др | |||
| Легкая атлетика: | |||

