Изобретение относится к электронному полевому прибору с сенсорным блоком для емкостных измерений уровня в резервуаре, согласно ограничительной части п.1 формулы.
Полевые приборы для емкостного измерения уровня известны уже много лет. При этом направленный в резервуар зонд и стенка резервуара образуют конденсатор. Емкость полученного таким образом конденсатора зависит от уровня и диэлектрической постоянной измеряемой среды.
Одной возможностью измерения этой емкости является так называемое измерение полного тока. При этом посредством традиционной выпрямительной схемы измеряют значение переменного тока, который при определенных частоте и напряжении течет через образованный зондом, средой и стенкой резервуара конденсатор. Полный ток зависит, правда, не только от емкости, но и от проводимости измеряемой среды, что на практике приводит к неточностям, поскольку проводимость прежде всего сыпучих продуктов зависит от различных факторов, таких, например, как температура и влажность воздуха.
Одним из методов подавления влияния параллельной проводимости является измерение при относительно высоких частотах. Поскольку протекающая через емкость доля (реактивная составляющая) полного тока увеличивается пропорционально частоте, тогда как вызванная проводимостью доля остается постоянной, при высоких частотах преобладает практически всегда емкостная доля. Измерение при высоких частотах (>100 кГц) приводит, однако, по опыту, к трудностям при длинных зондах с большими паразитными индуктивностями.
Другой метод состоит в том, чтобы измерять не полный ток, а реактивный ток при угле сдвига фаз 90° между током и напряжением, что соответствует чисто емкостному измерению. Это может быть реализовано с помощью синхронной выпрямительной схемы. У этого способа недостаток, однако, состоит в том, что, например, в средах с низкой диэлектрической постоянной и высокой проводимостью, в которых с помощью измерения полного тока измерения возможны без проблем, из-за практически исчезающего реактивного тока возникают трудности. Кроме того, подобные традиционные синхронные выпрямительные схемы, по опыту, восприимчивы к электромагнитным помехам.
В основе изобретения лежит задача создания электронного полевого прибора с сенсорным блоком для емкостных измерений уровня в резервуаре, который легко можно было бы приспособить к имеющимся полевым условиям и с помощью которого в зависимости от конкретного назначения применялся бы наиболее подходящий метод измерений.
Эта задача решается согласно изобретению посредством признаков п.1 формулы. Зависимые пункты касаются предпочтительных выполнений и усовершенствований изобретения.
Основная идея изобретения состоит в использовании микропроцессора для вырабатывания сигнала напряжения, для оценки измеряемого тока, для компенсации паразитных влияний и для вычисления определяемых величин устройства датчик/резервуар, причем соответствующие программы хранятся в блоке памяти. Для обработки микропроцессором аналоговый измеряемый ток преобразуют посредством аналого-цифрового преобразователя в цифровую форму. За счет использования микропроцессора простым образом можно выбирать и применять метод измерений, оптимальный для имеющихся полевых условий.
К тому же за счет использования микропроцессора можно вырабатывать различные выходные сигналы, которые зависят от дальнейшего использования выходного сигнала или применяемого протокола передачи. Так, можно вырабатывать, например, сигнал 4-20 мА, сигнал 0-10 В, ЧИМ-сигнал (частотно-импульсно-модулированный сигнал), двоичный коммутирующий сигнал и т.д. Можно также вырабатывать и передавать несколько выходных сигналов (сигнал 4-20 мА, сигнал 0-10 В, ЧИМ-сигнал, двоичный коммутирующий сигнал и т.д.) для различных протоколов передачи или целей применения.
У одной формы выполнения изобретения микропроцессор выполняет для вырабатывания сигнала напряжения генераторную функцию, причем измеряемую частоту сигнала напряжения устанавливает микропроцессор.
Согласно одной предпочтительной форме выполнения микропроцессор выполняет для вырабатывания сигналов напряжения с разными частотами функцию переключения частот.
Генераторная функция может быть реализована, например, путем деления частоты тактового сигнала микропроцессора, причем делителем частоты управляют в зависимости от желаемой измеряемой частоты сигнала напряжения посредством функции переключения частот.
За счет деления такта процессора сигнал напряжения может быть выработан практически с любой измеряемой частотой в пределах такта процессора. Переключение частот может быть реализовано, таким образом, без проблем с помощью программы. Это имеет, с одной стороны, преимущество того, что электронику можно приспособить к различным случаям применения, а, кроме того, за счет попеременного измерения при двух различных измеряемых частотах можно достичь простой компенсации параллельной проводимости.
Для вырабатывания синусоидального напряжения у одного усовершенствования изобретения предусмотрен фильтр нижних частот, который преобразует сигнал напряжения в синусоидальное напряжение. Можно также использовать для измерения любые произвольные формы сигналов с определенным содержанием высших гармоник.
Для вырабатывания синусоидальных напряжений с разными частотами фильтр нижних частот у одной предпочтительной формы выполнения изобретения располагает устанавливаемыми предельными частотами, причем актуальную предельную частоту фильтра нижних частот устанавливают посредством функции переключения частот в зависимости от установленной измеряемой частоты генератора для вырабатывания сигнала напряжения.
В соответствии с одним усовершенствованием изобретения измеряемый ток перед оценкой преобразуют посредством преобразователя ток/напряжение в пропорциональное измеряемому току измеряемое напряжение.
В соответствии с одним особенно предпочтительным усовершенствованием изобретения измеряемое напряжение выпрямляют выпрямителем и через аналого-цифровой преобразователь подают к микропроцессору для обработки.
Выпрямитель включает в себя согласно одной форме выполнения зарядный конденсатор и может быть выполнен, например, в виде пикового выпрямителя или в виде синхронного выпрямителя.
В первом методе измерений микропроцессор вычисляет значение измеряемого тока при определенном угле сдвига фаз в отношении сигнала напряжения, причем угол сдвига фаз может быть установлен микропроцессором.
Во втором методе измерений микропроцессор вырабатывает попеременно два сигнала напряжения с разными частотами и по соответствующим измеряемым токам вычисляет определенные величины устройства датчик/резервуар.
В соответствии с одной особенно предпочтительной формой выполнения изобретения микропроцессор вырабатывает необходимый угол сдвига фаз между сигналом напряжения и измеряемым током за счет выработанного им сдвига фаз между синхронизирующим сигналом и сигналом напряжения, причем синхронизирующий сигнал управляет синхронным выпрямителем.
Поскольку угол сдвига фаз, при котором измеряют ток через зонд, может быть выбран в широких пределах произвольно с помощью программных средств, можно осуществлять переключение между измерением чисто реактивного тока (емкостное измерение), измерением полного тока (измерение импеданса) и измерением чисто активного тока (измерение проводимости).
Поскольку синхронизирующий сигнал для синхронного выпрямления вырабатывают в микропроцессоре независимо и не выводят, как в традиционных синхронных выпрямительных схемах, из сигнала аналогового осциллятора, этот вид измерений менее восприимчив к электромагнитным помехам.
В соответствии с одной особенно предпочтительной формой выполнения изобретения микропроцессор в зависимости от определяемых величин и/или от полевых условий устанавливает измеряемую частоту сигнала напряжения и/или угол сдвига фаз для оценки измеряемого тока.
Определяемыми величинами устройства датчик/резервуар могут быть, например, импеданс и/или емкость, и/или проводимость.
Полевые условия включают в себя, например, геометрию датчика и резервуара и/или вид среды в резервуаре, и/или возмущающие воздействия.
Микропроцессор выполняет к тому же дополнительные функции, такие как линеаризация и масштабирование измеренного сигнала, и вырабатывает выходной сигнал датчика.
В соответствии с одной особенно предпочтительной формой выполнения изобретения измерение осуществляют не непрерывно, а в течение одного измерительного цикла вырабатывают и оценивают отдельные пакеты синусоидальных колебаний числом, например, 1000. Между отдельными пакетами синусоидальных колебаний имеются паузы, причем продолжительность пауз является переменной и устанавливается, например, генератором случайных чисел. За счет этого можно достичь повышенной невосприимчивости к электромагнитным воздействиям, поскольку между измерительным и паразитным сигналами не могут возникнуть постоянные интерференции.
В соответствии с одной особенно предпочтительной формой выполнения изобретения электронный полевой прибор посредством микропроцессора в паузах между измерительными циклами переключают в режим экономии энергии. В течение этих пауз через зонд также не течет ток. За счет этого расход тока можно снизить до доли расхода тока, обычного у емкостных датчиков. Это представляет особый интерес для применений устройств по NAMUR.
Изобретение более подробно поясняется с помощью прилагаемых чертежей, на которых изображено:
- фиг.1: принципиальная блок-схема электронного полевого прибора для первого метода измерений;
- фиг.2: принципиальная блок-схема электронного полевого прибора для второго метода измерений;
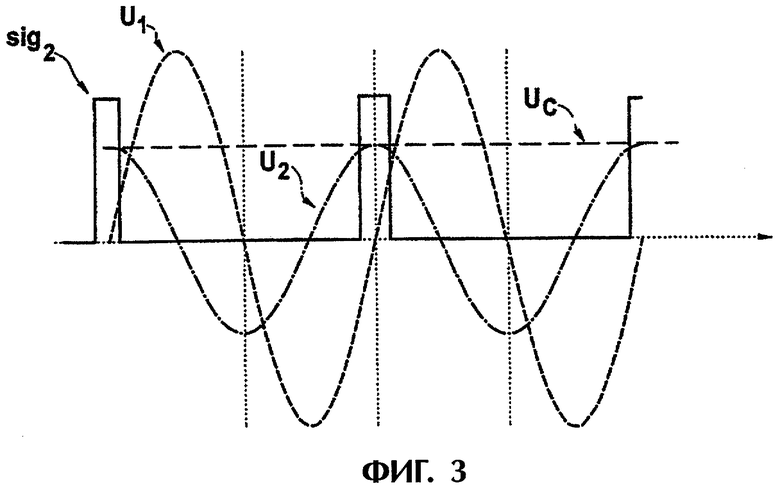
- фиг.3: зависимая от времени характеристика напряжений при чисто емкостной нагрузке;
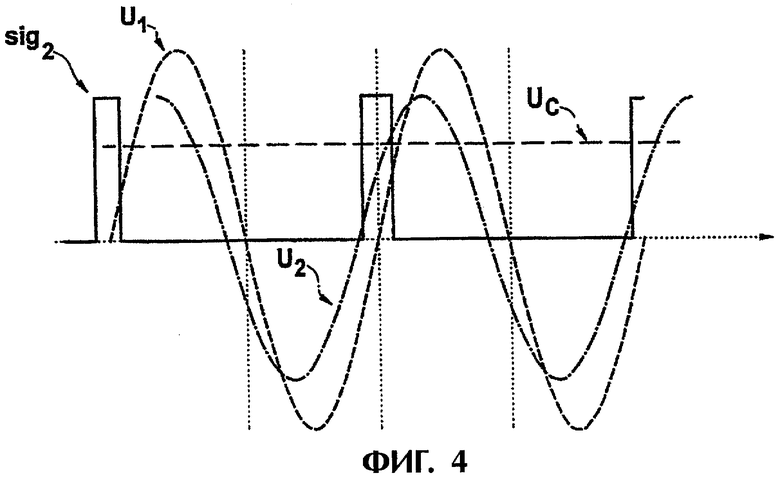
- фиг.4: зависимая от времени характеристика напряжений при смешанной емкостно-омической нагрузке.
Как видно из фиг.1 и 2, электронный полевой прибор включает в себя микропроцессор 1, датчик 2 для определения уровня среды 3.1 в резервуаре 3, фильтр 4, преобразователь 5 ток/напряжение, выпрямитель 6 и блок 7 памяти, причем выпрямитель 6 содержит конденсатор 6.1.
Как видно из фиг.1, микропроцессор 1 для осуществления первого метода измерений содержит функциональные блоки: генераторная функция 1.1, компенсация 1.2 возмущающих воздействий, вычислительная функция 1.3, масштабирование/линеаризация 1.4, вырабатывание выходного сигнала 1.5. Дополнительно имеется функциональный блок «установление измерительных циклов» 1.7, который определяет продолжительность измерительных циклов и продолжительность пауз между измерительными циклами. За счет этого посредством режима экономии энергии можно снизить расход тока. Дополнительно за счет изменения продолжительности пауз можно достичь повышенной невосприимчивости к электромагнитным воздействиям, поскольку между измерительным и паразитным сигналами не могут возникнуть постоянные интерференции. Посредством генераторной функции 1.1 микропроцессор 1 вырабатывает сигнал sig1 напряжения с измеряемой частотой f, который передается через PORT 1 и за счет последующего отфильтровывания нижних частот фильтром 4 преобразуется в синусоидальное напряжение U1. Генераторная функция 1.1 реализована при этом в виде делителя частоты или посредством встроенного в микропроцессор таймера, так что сигнал напряжения вырабатывается из тактового сигнала микропроцессора.
Для компенсации 1.2 возмущающих воздействий микропроцессор 1 выполняет функциональный блок «вырабатывание синхронизирующего сигнала» 1.8 и вырабатывает синхронизирующий сигнал sig2, который имеет устанавливаемый угол сдвига фаз по отношению к сигналу sig1 напряжения. В изображенном примере выполнения синхронизирующий сигнал sig2 используют для управления выпрямителем 6 и передают через PORT 2. В зависимости от угла сдвига фаз, установленного между сигналом sig1 напряжения и синхронизирующим сигналом sig2, можно осуществлять измерение чисто реактивного тока, т.е. устанавливают угол сдвига фаз 0°, или измерение чисто активного тока, т.е. устанавливают угол сдвига фаз 90°. Таким образом, можно устранить имеющиеся возмущающие воздействия, такие как омические сопротивления, у емкостного измерительного зонда или емкости у проводящего измерительного зонда.
Преобразователь 5 ток/напряжение преобразует вызванный сигналом U1 напряжения ток через сенсорный блок 2 в пропорциональный сигнал U2 напряжения.
Выпрямитель 6 выполнен для первого метода измерений в виде синхронного выпрямителя и содержит дополнительно к зарядному конденсатору 6.1 управляемый выключатель 6.2, выполненный, например, в виде МОП-транзистора. Выключатель 6.2 управляется синхронизирующим сигналом sig2. При приложении высокого уровня синхронизирующим сигналом sig2 зарядный конденсатор 6.1 заряжается через выключатель 6.2 до данного моментального значения напряжения U2. При угле сдвига фаз 0°, установленном между сигналом sig1 напряжения и синхронизирующим сигналом sig2, выходное напряжение UC выпрямителя 6 соответствует реактивной составляющей протекающего через сенсорный блок 2 тока. Выходное напряжение UC подают через аналого-цифровой преобразователь 8 к микропроцессору 1, причем аналого-цифровой преобразователь 8 в изображенном примере выполнения встроен в микропроцессор 1.
С помощью вычислительной функции 1.3 микропроцессор 1 вычисляет по выпрямленному напряжению UC, измеренному на зарядном конденсаторе 6.1, определяемые величины устройства датчик/резервуар, например емкость C1 и/или параллельное сопротивление R1.
В качестве дополнительной функции микропроцессор 1 выполняет масштабирование и линеаризацию 1.4 вычисленных значений.
При вырабатывании выходного сигнала 1.5 микропроцессор 1 вырабатывает желаемый выходной сигнал, который зависит от дальнейшего использования выходного сигнала или от используемого протокола передачи. Так, например, может быть выработан сигнал 4-20 мА, сигнал 0-10 В, ЧИМ-сигнал (частотно-импульсно-модулированный сигнал), двоичный коммутирующий сигнал и т.д. Можно также вырабатывать и передавать несколько выходных сигналов (сигнал 4-20 мА, сигнал 0-10 В, ЧИМ-сигнал, двоичный коммутирующий сигнал и т.д.) для различных протоколов передачи или целей применения. Для вырабатывания определенных стандартных выходных сигналов в микропроцессор 1 может быть встроен цифроаналоговый преобразователь 9.
На фиг.3 в зависимости от времени изображены сигналы U1, U2 и sig2. Если принять чисто емкостное поведение устройства датчик/среда/резервуар с емкостью C1, то напряжение U2, пропорциональное протекающему через сенсорный блок 2 току, сдвинуто по фазе на 90° относительно напряжения U1. Зарядный конденсатор 6.1 в течение определяемого сигналом sig2 промежутка времени заряжается до пикового значения U2 в этот промежуток времени, т.е. до напряжения UC. Установленный угол сдвига фаз между сигналом sig1 напряжения и синхронизирующим сигналом sig2, составляет при этом 0°.
На фиг.4 в зависимости от времени также изображены сигналы U1, U2 и sig2. Однако дополнительно к емкости C1 учитывают параллельное сопротивление R1 среды 3.1. Как видно из диаграммы, возрастает значение тока через сенсорный блок 2 и, тем самым, значение представляющего ток напряжения U2. Угол сдвига фаз между U1 и U2 составляет менее 90°. При этом значение напряжения U2 в определяемый сигналом sig2 промежуток времени изменяется по сравнению с изображенным на фиг.3 случаем лишь незначительно, и, тем самым, зарядный конденсатор 6.1 заряжается до того же напряжения UC, что и при чисто емкостной нагрузке. Установленный угол сдвига фаз между сигналом sig1 напряжения и синхронизирующим сигналом sig2, составляет также 0°, и осуществляется измерение чисто реактивного тока.
Таким образом, можно измерять емкость C1 независимо от имеющегося параллельного сопротивления R1. Поскольку многие проблемы вызваны при емкостных измерениях проводимостью и колебаниями влажности, которые изменяют проводимость измеряемой среды 3.1, это дает заметные преимущества.
Для осуществления измерения полного тока выключатель 6.2 в выпрямителе 6 постоянно замкнут, т.е. синхронизирующий сигнал sig2 является постоянным высоким сигналом, или используют простой пиковый выпрямитель.
Как видно из фиг.2, микропроцессор 1 для осуществления второго метода измерений также содержит функциональные блоки генераторная функция 1.1, компенсация 1.2 возмущающих воздействий, вычислительная функция 1.3, масштабирование/линеаризация 1.4, вырабатывание выходного сигнала 1.5. Дополнительно имеется функциональный блок «установление измерительных циклов» 1.7, который определяет продолжительность измерительных циклов и продолжительность пауз между измерительными циклами. За счет этого посредством режима экономии энергии можно снизить расход тока. Дополнительно за счет изменения продолжительности пауз можно достичь повышенной невосприимчивости к электромагнитным воздействиям, поскольку между измерительным и паразитным сигналами не могут возникнуть постоянные интерференции.
Компенсация 1.2 возмущающих воздействий включает в себя, однако, во втором методе измерений частотный переключатель 1.6, который определяет измеряемую частоту f выработанного генераторной функцией 1.1 сигнала sig1 напряжения. Для компенсации 1.2 возмущающих воздействий сигнал sig1 напряжения с заданными интервалами времени попеременно с частотами f1 и f2 передают через PORT 1. За счет последующего отфильтровывания нижних частот сигнал sig1 напряжения преобразуют в синусоидальное измеряемое напряжение U1(f1/f2), причем предельную частоту фильтра 4 устанавливают в соответствии с заданным за счет вырабатывания сигнала интервала времени, подходящей для частот f1 и f2. Установление предельных частот фильтра 4 происходит посредством выработанного частотным переключателем 1.6 управляющего сигнала, передаваемого через PORT 3. За счет этого для каждой частоты f1 и f2 достигается оптимальное преобразование прямоугольник/синус.
Преобразователь 5 ток/напряжение преобразует вызванный сигналом U1(f1/f2) напряжения ток через сенсорный блок 2 в пропорциональный сигнал U2 напряжения.
Выпрямитель 6 включает в себя зарядный конденсатор 6.1 и вырабатывает пропорциональное U2 постоянное напряжение UC и может быть выполнен в виде традиционного пикового выпрямителя или синхронного выпрямителя, как это описано со ссылкой на фиг.1.
Выходные напряжения UC(f1) и UC(f2) зарядного конденсатора 6.1 подают через аналого-цифровой преобразователь к микропроцессору 1, причем аналого-цифровой преобразователь в изображенном примере выполнения встроен в микропроцессор 1.
С помощью вычислительной функции 1.3 микропроцессор 1 вычисляет по выпрямленным напряжениям UC(f1) и UC(f2), измеренным на зарядном конденсаторе 6.1, определяемые величины устройства датчик/резервуар, например емкость C1 и/или параллельное сопротивление R1. Вычисление значений C1 и R1 по напряжениям UC(f1) и UC(f2) происходит следующим образом.
Весь протекающий через сенсорный блок 2 полный ток определяется по формуле
причем протекающий через конденсатор ток IC1 зависит от частоты:

Если измерения происходят при двух разных частотах f1 и f2, то справедливо:


причем токи IS(f1) и IS(f2) за счет преобразования ток/напряжение и выпрямления пропорциональны U2(f1) и U2(f2) и, тем самым, известны. Следовательно, благодаря уравнениям [3] и [4] в распоряжении имеются два уравнения с двумя неизвестными, по которым можно вычислить C1 и R1.
Таким образом, можно измерить емкость C1 независимо от параллельного сопротивления R1. Поскольку многие проблемы при емкостных измерениях вызваны проводимостью и колебаниями влажности, которые изменяют проводимость измеряемой среды 3.1, это дает заметные преимущества.
Компенсация 1.2 возмущающих воздействий происходит, тем самым, за счет вырабатывания сигналов напряжения с разными частотами и за счет устранения соответствующего возмущающего воздействия при вычислении.
Масштабирование и линеаризация 1.4 измеренных и вычисленных значений, а также вырабатывание и передача желаемого выходного сигнала 1.5 происходят аналогично рассуждениям со ссылкой на фиг.1.
Особенно предпочтительный электронный полевой прибор комбинирует в себе оба метода измерений за счет того, что функциональные блоки для первого метода измерений и функциональные блоки для второго метода измерений реализованы в микропроцессоре 1. Выбор осуществляемого метода измерений и ввод необходимых параметров (частота, сдвиг по фазе) производится тогда пользователем в зависимости от устройства датчик/резервуар и измеряемой среды 3.1 и может быть осуществлен путем соответствующего диалога при вводе через средства ввода (не показаны). Выбор может осуществляться также из пункта управления через соответствующие коммуникационные соединения.
Кроме того, необходимые параметры (частота, сдвиг по фазе) и установки можно изменять посредством сменных блоков памяти.

Изобретение относится к электронному полевому прибору с сенсорным блоком (2) для емкостных измерений уровня в резервуаре (3). Электронный полевой прибор через соответствующие сигнальные пути связан с сенсорным блоком (2), вырабатывает сигнал напряжения для управления сенсорным блоком (2) и принимает и оценивает измеряемый ток от сенсорного блока (2). Согласно изобретению имеются аналого-цифровой преобразователь (8) для преобразования в цифровую форму аналогового измеряемого тока, микропроцессор (1) и блок (7) памяти. Микропроцессор (1) осуществляет вырабатывание сигнала напряжения, оценку измеряемого тока, компенсацию возмущающих воздействий и вычисление определяемых величин устройства датчик/резервуар в соответствии с заданными программами, которые хранятся в блоке (7) памяти. Изобретение обеспечивает измерение емкости независимо от имеющейся активной проводимости измеряемой среды. 12 з.п. ф-лы, 4 ил.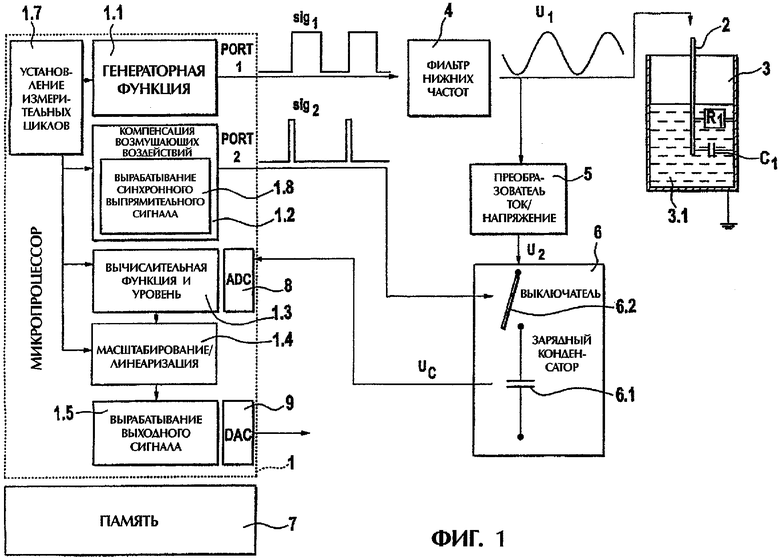
| US 5477473 А, 19.12.1995 | |||
| ЦЕНТРИФУГА ДЛЯ ВРАЩЕНИЯ ФОРМЫ ВОКРУГ ДВУХ ОСЕЙ | 0 |
|
SU338400A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ДЕФОРМАЦИЙ И НАПРЯЖЕНИЙ В ОСНОВАНИИ ФУНДАМЕНТА | 0 |
|
SU271849A1 |
| Устройство для сигнализации | 1983 |
|
SU1091199A1 |
| ЕР 1108984 А1, 20.06.2001 | |||
| ЕР 1093039 A1, 18.04.2001 | |||
| ЕМКОСТНЫЙ ИЗМЕРИТЕЛЬ УРОВНЯ | 1993 |
|
RU2042929C1 |

