Изобретение относится к электронной схеме полевого прибора с сенсорным блоком для техники измерения процессов согласно ограничительной части п.1 формулы.
Практически у всех имеющихся сегодня на рынке сенсорных блоков для определения уровня жидкостей и сыпучих материалов и для определения расхода среды через систему труб, работающих на основе электромеханических преобразователей (виброника), используются синусоидальные или прямоугольные электрические сигналы переменного напряжения в качестве управляющих сигналов для возбуждения основной гармоники у сенсорных блоков. Сигналы переменного напряжения вырабатывают обычно посредством аналогового осциллятора и для дальнейшей обработки подвергают аналоговой фильтрации, выпрямляют и у выключателей предельного уровня посредством аналоговых компараторов сравнивают с заданными пороговыми значениями. Микропроцессоры используют, как правило, только для того, чтобы подготовленные посредством аналогового электронного блока сигналы линеаризовать, масштабировать, а также снабдить временной задержкой, гистерезисом при переключении или инвертированием.
Слабость этих сенсорных блоков проявляется при образовании отложения. У различных сред, например цемента, возможно прилипание слоя среды к сенсорному датчику, тогда как уровень заполнения лежит ниже уровня измерения. Этот слой может демпфировать колебание сенсорного датчика настолько, что электроника переключится на состояние "покрыт". Кроме того, у сенсорного датчика, выполненного в виде колебательной вилки, несимметричное образование отложения может привести к тому, что колебание будет передаваться на корпус и резервуар. Из-за этого у колебательной системы отбирается столько энергии, что она при определенных обстоятельствах может быть полностью демпфирована. Такое поведение также ведет к ошибочным измерениям.
В основе изобретения лежит задача создания электронной схемы полевого прибора для возбуждения основной гармоники у колебательной механической системы, которая могла бы обходиться малым числом элементов и, тем не менее, допускала бы много возможностей обработки измерительных сигналов, подготовки измерительных сигналов и компенсации возмущающих воздействий.
Эта задача решается согласно изобретению посредством признаков п.1 формулы. Зависимые пункты касаются предпочтительных выполнений и усовершенствований изобретения.
Основная идея изобретения состоит в том, чтобы использовать способы и узлы цифровой обработки сигналов для подготовки аналогового измерительного сигнала и для вырабатывания управляющего сигнала для сенсорного блока. Для этой цели электронная схема полевого прибора согласно изобретению содержит для вырабатывания управляющего сигнала аналого-цифровой преобразователь, цифровой фазокомпенсатор и цифроаналоговый преобразователь, причем аналоговые измерительные сигналы посредством аналого-цифрового преобразователя преобразуют в цифровую форму и подают к фазокомпенсатору, а выходной сигнал фазокомпенсатора посредством цифроаналогового преобразователя преобразуют в аналоговый управляющий сигнал для сенсорного блока.
У одной особенно предпочтительной формы выполнения изобретения между аналого-цифровым преобразователем и фазокомпенсатором расположен цифровой фильтрующий блок для отфильтровывания преобразованного в цифровую форму измерительного сигнала.
Фазокомпенсатор содержит в основном кольцевую память, в ячейки которой последовательно записывают преобразованные в цифровую форму и отфильтрованные значения измерительного сигнала. Фазовый сдвиг управляющего сигнала относительно измерительного сигнала достигается за счет того, что значение, выводимое из кольцевой памяти, считывают из ячейки памяти, которая на задаваемое число ячеек памяти расположена перед или за той ячейкой памяти, в которой хранится актуальное считанное значение. При этом задаваемое число ячеек памяти представляет определенный угол фазового сдвига. Образованный задаваемым числом ячеек памяти угол фазового сдвига может иметь постоянное значение, устанавливаемое и записываемое после или до пуска в эксплуатацию электронной схемы полевого прибора или переменное значение, изменяющееся в зависимости от частотной и/или амплитудной характеристики измерительного сигнала.
У одного особенно предпочтительного усовершенствования изобретения компенсацию возмущающих воздействий осуществляют посредством способов и узлов цифровой обработки сигналов. Для регистрации таких возмущающих воздействий, например образования отложения на сенсорном датчике, электронная схема полевого прибора дополнительно содержит частотомер для определения частоты измерительного сигнала.
За счет обработки измеренной частоты измерительного сигнала узнают вызванное образованием отложения изменение резонансной частоты системы. Для компенсации возмущающих воздействий электронная схема полевого прибора содержит регулируемый усилитель, коэффициент усиления которого устанавливают в зависимости от полученной резонансной частоты системы.
У одной формы выполнения изобретения частотомер определяет частоту выходного сигнала аналого-цифрового преобразователя, а регулируемый усилитель расположен между фазокомпенсатором и цифроаналоговым преобразователем или между цифровым фильтром и фазокомпенсатором, причем аналого-цифровой преобразователь реализован, например, функцией триггера Шмитта или аналоговым компаратором.
Для оценки измерительного сигнала и для вырабатывания выходного сигнала, представляющего состояние "покрыт" или "не покрыт", электронная схема полевого прибора содержит аналого-цифровой преобразователь и формирователь среднего значения и/или частотомер. Для оценки изменений амплитуды и для вырабатывания выходного сигнала используют аналого-цифровой преобразователь и формирователь среднего значения. Для оценки изменений частоты и для вырабатывания выходного сигнала используют аналого-цифровой преобразователь и частотомер.
У одного предпочтительного выполнения изобретения сенсорный блок выполнен в виде активного электромеханического преобразователя и вырабатывает измерительный сигнал для определения и/или контроля уровня среды в резервуаре.
У другого предпочтительного выполнения изобретения активный электромеханический преобразователь вырабатывает измерительный сигнал для определения и/или контроля расхода среды через систему труб.
У других предпочтительных выполнений изобретения активный электромеханический преобразователь выполнен в виде колебательной вилки или колебательного стержня, содержащих соответственно приводной и детекторный блоки, причем детекторный блок вырабатывает аналоговые измерительные сигналы и передает их электронной схеме полевого прибора, а управляющие сигналы передаются электронной схемой полевого прибора приводному блоку. Может быть использован также единственный электромеханический преобразователь, служащий одновременно приводным и детекторным блоками.
У одной особенно предпочтительной формы выполнения изобретения способы и узлы цифровой обработки сигналов реализованы микропроцессором, причем соответствующие программы для выполнения функций микропроцессором хранятся в блоке памяти. Преимущественно микропроцессор выполняет функцию триггера Шмитта, и/или измерение частоты, и/или фазовый сдвиг, и/или усиление, и/или формирование среднего значения, и/или функцию компаратора, и/или регулирование усиления, и/или вырабатывание выходного сигнала, причем цифроаналоговый преобразователь и/или аналого-цифровой преобразователь встроены в микропроцессор.
Ниже пример выполнения изобретения более подробно поясняется с помощью чертежей, на которых изображают:
- фиг.1: блок-схему электронной схемы полевого прибора;
- фиг.2: схематично характеристику сигнала на входе и выходе аналого-цифрового преобразователя с функцией триггера Шмитта;
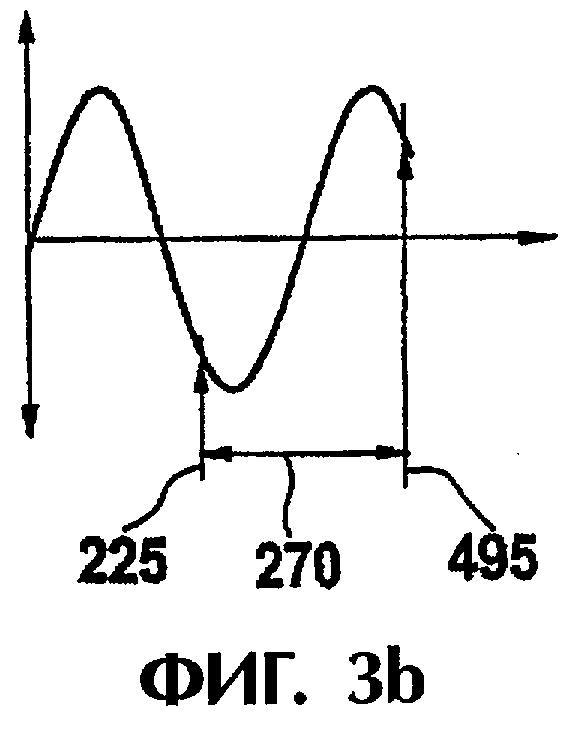
- фиг.3: принцип реализации цифрового фазового сдвига;
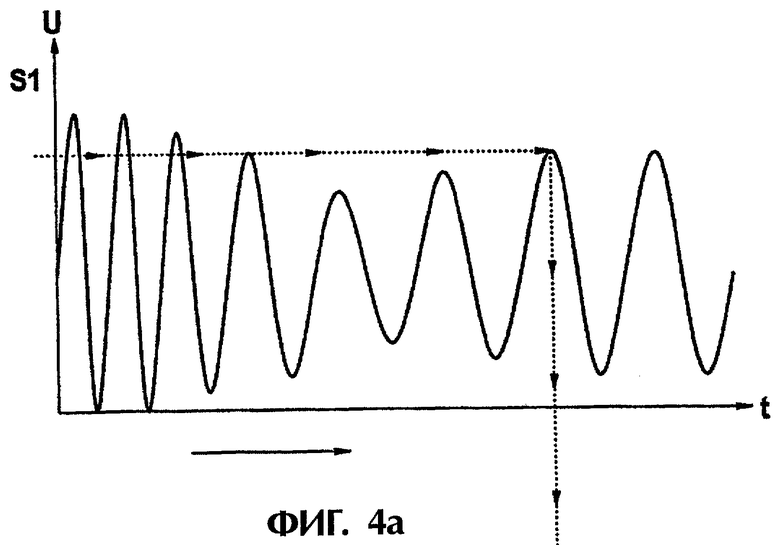
- фиг.4: диаграмму входного сигнала и коэффициента усиления при регулировании усиления;
- фиг.5: диаграмму различных характеристик сигнала при резонансной частоте;
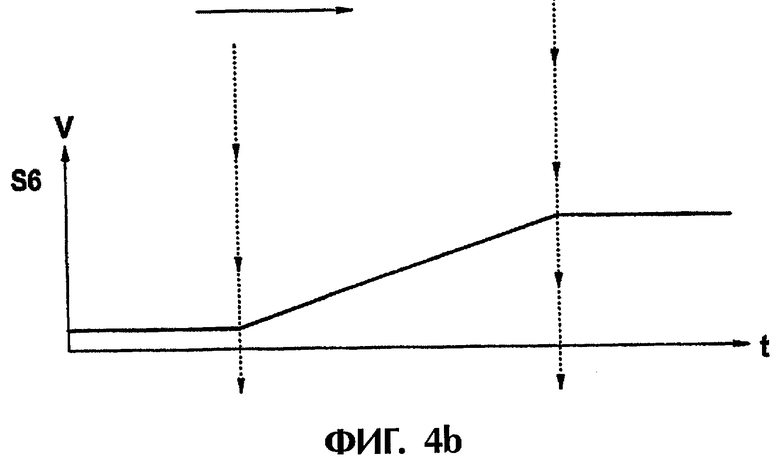
- фиг.6: диаграмму различных характеристик сигнала при сдвиге резонансной частоты.
Как видно из фиг.1, электронная схема полевого прибора содержит микропроцессор 1, память 2, аналоговый электронный блок 3 и сенсорный датчик 4, выполненный в виде колебательной механической системы.
Электронная схема полевого прибора служит для приведения в колебание колебательной механической системы 4 путем возбуждения основной гармоники, с тем чтобы реализовать полевой прибор для измерения уровня и расхода. Собственно принцип возбуждения основной гармоники является известным и зарекомендовавшим себя способом. Новым в данном принципе является то, что часть фильтрования 20, оценку, компенсацию возмущающих воздействий и связанный с этим алгоритм динамического усиления выполняют посредством способов и узлов цифровой обработки сигналов, причем используют преимущественно микропроцессор 1.
Как далее видно из фиг.1, в микропроцессор 1 встроен аналого-цифровой 10 и цифроаналоговый 50 преобразователи. Кроме того, микропроцессор реализует функциональные блоки: цифровой фильтр 20, фазокомпенсатор 30, усилитель 40, формирователь 60 среднего значения, компаратор 70, вырабатывание выходного сигнала 80, измерение 90 частоты и регулирование 100 усиления, причем соответствующие программы для реализации функциональных блоков хранятся в памяти 2.
Колебательная механическая система содержит колебательный элемент, а также соответствующие возбуждающие и детекторные элементы. Колебательный элемент выполнен, например, в виде колебательного стержня или колебательной вилки с известными резонансными частотами, и колебания возбуждаются в нем посредством пьезоэлектрического элемента. Результирующий из этих колебаний измерительный сигнал детектируют посредством детекторного элемента, например электромеханического преобразователя, также выполненного в виде пьезоэлектрического элемента, и подают для подготовки к аналоговому электронному блоку 3. Аналоговый электронный блок 3 включает в себя два канала для передачи сигналов. Один канал является путем от сенсорного датчика 4 к микропроцессору 1, а другой - путем от микропроцессора 1 к сенсорному датчику 4. Сигналы поднимают в обоих направлениях соответственно с помощью аналоговой схемы 3.1 до определенного потенциала, отфильтровывают посредством фильтрующей схемы 3.2 нижних частот и усиливают посредством усилительного каскада 3.3 переменного напряжения. За счет подъема на определенное напряжение смещения измерительный сигнал S1 может быть обработан дальше также с асимметричным питающим напряжением. Фильтрующая схема 3.2 нижних частот препятствует передаче мешающих частот.
Актуальное значение подготовленного измерительного сигнала S1 записывают с помощью аналого-цифрового преобразователя 10 с постоянной частотой дискретизации, причем минимальная реализуемая частота дискретизации для записи аналоговых значений, по меньшей мере, на коэффициент 2 выше резонансной частоты сенсорного датчика 4. Аналого-цифровой преобразователь 10 преобразует записанное актуальное значение в цифровое значение. Это цифровое значение составляет, например, при разрешении 8 бит 0-255. Если сенсорный датчик находится в состоянии покоя, значение принимает среднее значение всех возможных значений, т.е. при разрешении 8 бит, следовательно, 128. Так аналого-цифровой преобразователь 10 постепенно вырабатывает из подготовленного аналогового сигнала S1 цифровой сигнал, который может быть обработан программой микропроцессора, причем аналоговый сигнал S1 постоянно записывают и преобразуют в цифровую форму. Напряжение смещения аналоговой схемы 3.1 установлено, следовательно, так, что оно соответствует среднему значению всех аналоговых значений, которые может обнаружить микропроцессор 1.
У описанной предпочтительной формы выполнения изобретения измерительный сигнал S1 оценивают посредством функции 11 триггера Шмитта, которая в изображенном примере выполнения является частью аналого-цифрового преобразователя 10. Функция 11 триггера Шмитта оценивает направление изменения относительно среднего значения. Это означает, что значение, лежащее на том же уровне или выше среднего значения (например, при разрешении 8 бит ≥128), передается к последующим функциональным блокам в качестве положительной постоянной, а значение ниже среднего значения (<128) - в качестве отрицательной постоянной. Таким образом, аналоговый измерительный сигнал S1 преобразуется в прямоугольный сигнал S2, который является синфазным аналоговому измерительному сигналу S1 и имеет амплитуду, соответствующую значению постоянной. Тем самым амплитуда цифрового прямоугольного сигнала S2 независима от величины аналогового значения S1 и имеет всегда одинаковую величину.
На фиг.2 изображены аналоговый измерительный сигнал S1 до реализации функции 11 триггера Шмитта и цифровой прямоугольный сигнал S2 после реализации функции 11 триггера Шмитта. Как видно из фиг.2, независимо от амплитуды измерительного сигнала S1 вырабатывается прямоугольный сигнал S2 с постоянной амплитудой. Частота прямоугольного сигнала S2 равна частоте измерительного сигнала. Действительное, преобразованное в цифровую форму аналоговое значение передается формирователю 60 среднего значения.
Каждое новое значение прямоугольного сигнала S2 подают к цифровому фильтру 20. Цифровой фильтр 20 является преимущественно фильтром 2-го порядка. Фильтрование препятствует передаче ошибочных частот и нарастанию колебаний датчика 4 в более высокой моде. К тому же цифровой фильтр 20 генерирует из прямоугольного сигнала S2 снова синусоидальный сигнал S3.
Вычисленные функцией 20 фильтра значения записывают так называемым способом "first in - first out" в кольцевую память 31 (кольцевая память обратного магазинного типа), являющуюся частью фазокомпенсатора 30. За счет установления размера кольцевой памяти достигается то, что в каждый момент имеются значения, по меньшей мере, одного периода колебаний выходного сигнала S3 цифрового фильтра 20. Тем самым можно снова с фазовым сдвигом выдать отфильтрованный сигнал S3. Это происходит за счет того, что из кольцевой памяти 31 выводят не актуальное значение, а значение, находящееся в ячейке памяти, находящейся на задаваемое число ячеек памяти перед той ячейкой памяти, в которую записывают актуальное значение. Задаваемое число ячеек памяти представляет тогда определенный угол фазового сдвига. Поскольку частота сигнала на основе физики никогда не может изменяться резко, следующее на постоянный угол значение приблизительно соответствует значению, которое на разностное значение угла опережает до 360°. Если, например, период выходного сигнала S3 цифрового фильтра 20 записывают в 360 ячеек памяти, то заданное число из 270 ячеек памяти представляет положительный фазовый сдвиг в 90°. Определив, сколько ячеек памяти находится между выведенным и записанным последним значениями, устанавливают тем самым угол фазового сдвига между выходным S4 и входным S3 сигналами фазокомпенсатора 30. За счет этого можно выдать выходной сигнал S4 и тем самым управляющий сигнал S5 с устанавливаемым фазовым сдвигом относительно входного сигнала S3 и тем самым измерительного сигнала S1.
На фиг.3 изображено получение фазового сдвига посредством кольцевой памяти 31.
Как видно из фиг.3а, стрелка для записи актуального значения указывает на ячейку 495 памяти, тогда как стрелка для актуального выводимого значения указывает на ячейку 225. Таким образом, актуальное выводимое значение находится перед актуальным водимым значением, а задаваемое число ячеек памяти в этом примере равно 270.
На фиг.3b изображено мгновенное содержимое кольцевой памяти. В изображенном примере период колебаний записывают в 360 ячеек.
На фиг.3с в виде диаграммы изображены входной S3 и выходной S4 сигналы фазокомпенсатора. Как видно из этой диаграммы, выходной сигнал S4 опережает входной сигнал S3 в изображенном примере на 90°. Таким образом, заданное число из 270 ячеек памяти соответствует в изображенном примере выполнения фазовому сдвигу на 90°.
Считанное из фазокомпенсатора 30 значение умножают на актуальный коэффициент S6 усиления усилителя и выводят через цифроаналоговый преобразователь 50 в виде управляющего сигнала S5. Управляющий сигнал S5 подготавливают и усиливают также с помощью аналогового электронного блока 3. Результирующий сигнал подают к электромеханическому преобразователю и усиливают собственное колебание датчика 4. Таким образом, возникают электромеханический колебательный контур и тем самым нарастающее до максимально возможной амплитуды колебание. Следовательно, колебание колебательной механической системы возбуждают ее собственным, опережающим за счет фазового сдвига сигналом основной гармоники. Электромеханический преобразователь может быть выполнен, например, в виде пьезоэлемента и размещен в подходящем месте на сенсорном датчике 4.
Выработанный сенсорным датчиком 4 сигнал является сигналом переменного напряжения. Пока датчик находится в состоянии покоя, т.е. не колеблется, амплитуда сигнала равна приблизительно нулю. Однако и минимальных движений, которые сенсорный датчик совершает даже в состоянии покоя, достаточно для изменения сигнала, обнаруживаемого микропроцессором. Таким образом, возбуждается колебательный процесс.
Резонансную частоту колебательной системы 4 постоянно измеряют и оценивают. За счет этого обнаруживают вызванные образованием отложения изменения частоты. При сдвиге частоты, позволяющем сделать вывод об отложении, осуществляют подрегулирование ориентированного на соответствующий процесс коэффициента S6 усиления для усилительного каскада 40, с тем чтобы тем самым согласовать амплитуду колебаний колебательного элемента при образовании отложения. Кроме того, оценка изменения частоты позволяет при использовании в жидкостях решить, покрыта ли колебательная система или нет.
Периодически осуществляют расчет среднего значения амплитуды 60 и оценку измерительного сигнала. Оценка среднего значения позволяет судить о том, покрыт ли датчик или нет.
Амплитуда и частота входного сигнала S1 в микропроцессоре 1 говорят о состоянии покрытия, которое испытывает в данный момент сенсорный датчик 4. Эта оценка происходит посредством расчета 60 среднего значения абсолютных значений одного или нескольких периодов. При погружении сенсорного датчика 4 в измеряемую среду демпфирование возрастает, и в большинстве случаев частота сигналов уменьшается. Оценка среднего значения и/или частоты указывает на это состояние и может вызвать реакцию, например сигнал тревоги. В изображенном примере выполнения оценка происходит посредством компаратора 70, который сравнивает актуальные значения среднего значения абсолютных значений и/или резонансной частоты с заданными значениями и генерирует соответствующий сигнал ("покрыт" или "не покрыт"). Из этого сигнала компаратора в функциональном блоке 80 вырабатывается выходной сигнал, причем также осуществляют необходимое согласование (масштабирование, инвертирование и т.д.) выходного сигнала для дальнейшей передачи к вышестоящему блоку.
Функциональный блок 80 вырабатывает выходной сигнал, зависимый от дальнейшего использования выходного сигнала или от используемого протокола передачи. Так, например, может вырабатываться сигнал 4-20 мА, сигнал 0-10 В, ЧИМ-сигнал (частотно-импульсно модулированный сигнал), двоичный сигнал или цифровой код и т.д. Однако возможно, чтобы функциональный блок 80 вырабатывал и выдавал несколько выходных сигналов (4-20 А, 0-10 В, ЧИМ-сигнал, двоичный сигнал и т.д.) для различных протоколов передачи или назначений. Для вырабатывания определенных стандартизированных выходных сигналов цифро-аналоговый преобразователь может быть частью функционального блока 80 или реализован в виде собственного функционального блока.
Если сенсорный датчик 4 демпфируют не за счет погружения в измеряемую среду, а за счет отложения, дополнительно к уменьшению амплитуд сигналов возникает эффект изменения резонансной частоты системы. Поскольку колебание создается на основе возбуждения основной гармоники, сенсорный датчик 4 и все сигналы настраиваются на эту измененную частоту. Два эффекта могут вызвать уменьшение амплитуды сигналов при отложении: во-первых, сенсорный датчик 4 демпфируется за счет трения отложения, а, во-вторых, при несимметричном отложении часть колебательной энергии передается на резервуар. Чувствительно настроенная оценка сообщила бы о состоянии "покрыт". Настоящий способ обнаруживает, напротив, такое изменение частоты за счет образования отложения. При значении ниже постоянного допустимого значения (порог: минимальная амплитуда) ориентированное на соответствующий процесс усиление S6 сигнала повышается. Это происходит за счет увеличения коэффициента, на которое умножают актуальное выводимое значение, пока среднее значение абсолютных значений входного сигнала лежит ниже постоянного значения (порог: минимальная амплитуда). За счет этого происходит пропорциональное уменьшению резонансной частоты повышение кругового усиления системы. Колебание усиливается, а воздействие сдвига резонансной частоты на амплитуды сигналов компенсируется. Среднее значение абсолютного входного сигнала остается выше порога, обозначающего состояние "покрыт", что предотвращает ошибочное измерение.
На фиг.4 изображена описанная взаимосвязь между сдвигом резонансной частоты у входного сигнала S1 (верхняя диаграмма) и установленного регулированием 100 усиления коэффициента S6 усиления (нижняя диаграмма). Коэффициент S6 усиления повышают при этом до тех пор, пока снова не будет достигнут порог минимальной амплитуды.
На фиг.5 и 6 изображены характеристики измерительного сигнала S1, выходного сигнала S2 функции триггера Шмитта или передаваемого на цифровой фильтр 20 сигнала S2, коэффициента S6 усиления и управляющего сигнала S5, причем фиг.5 изображает характеристики сигналов при резонансной частоте, а фиг.6 - при измененной резонансной частоте.
Способ дополнительно усовершенствуют посредством ориентированного на процесс демпфирования базового усиления. Базовое усиление является коэффициентом, с которым оценивают поступающие аналоговые измерительные сигналы S1 на входе процессора. Функцию 11 триггера Шмитта настраивают так, чтобы она в качестве абсолютного значения не передавала максимально возможное значение, например 256 при 8 битах. Вместо этого значение устанавливают на величину, например, 128 при 8 битах, которая без изменения коэффициента усиления за счет фазового сдвига на сенсорном датчике 4 настраивает определенную амплитуду. Эта амплитуда приблизительно соответствует той амплитуде, которую сенсорный датчик 4 может с максимальным усилением достичь при реально возможном образовании отложения. На диаграмме (S2 на фиг.5 и 6) изображенные сигналы нормированы на максимальное значение (например, 256 при 8 битах), т.е. базовое усиление на фиг.5 составляет 0,5, а на фиг.6-1. Несмотря на это, демпфирование базового усиления остается достаточно пространства для высокой чувствительности измерения всей системы. При обнаружении сильного изменения частоты системы за счет образования отложения (см. измерительный сигнал S1 на фиг.6) внутреннее демпфирование прекращают и амплитуду прямоугольного сигнала S2 передают с коэффициентом 1 (см. S2 на фиг.6). Тем самым резко повышается амплитуда возбуждения (управляющий сигнал S6 на фиг.6), чем противодействуют демпфированию механического колебания. Этот эффект и пропорциональное повышение коэффициента S6 внутреннего усиления (S6 на фиг.5 и 6) вызывают подрегулирование усилительной характеристики с PI - аналогичным характером.
Тот факт, что амплитуда в непокрытом случае без отложения приблизительно равна амплитуде, устанавливающейся с помощью подрегулирования при образовании отложения, имеет дополнительный положительный эффект. Это согласование обеспечивает то, что в обоих случаях - с отложением или без - чувствительность измерения остается постоянной, поскольку полезное отношение сигнал/помеха одинаково по величине.




Изобретение относится к области приборостроения и может быть использовано для измерения уровня жидких и сыпучих материалов. Технический результат - расширение функциональных возможностей. Для достижения данного результата электронная схема полевого прибора соединена с сенсорным блоком. Причем электронная схема полевого прибора принимает аналоговые измерительные сигналы сенсорного блока, вырабатывает аналоговые управляющие сигналы для возбуждения основной гармоники сенсорного блока и передает на сенсорный блок. При этом выходной сигнал фазокомпенсатора преобразуют посредством цифро-аналогового преобразователя в управляющий сигнал для сенсорного блока. 16 з.п. ф-лы, 6 ил.
| US 4718776 А, 12.01.1988 | |||
| Широкополосный сейсмический вибратор | 1989 |
|
SU1817051A1 |
| Время-импульсный фотоэлектрический уровнемер сыпучих материалов | 1976 |
|
SU605108A1 |
| ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО | 2002 |
|
RU2219405C2 |
| ЛОТОВЫЙ УРОВНЕМЕР СЫПУЧИХ МАТЕРИАЛОВ | 1999 |
|
RU2158904C2 |

