Предлагаемое устройство относится к области гидроакустической техники и может быть использовано в гидроакустических системах дистанционного управления, а также в подсистемах гидроакустического телеуправления.
Известны радиогидроакустические устройства для дистанционного отсоединения подводного изделия и контроля его местоположения на поверхности моря (патенты РФ №2099748, 2128350, 2167430; патент США №4905210; патент ЕР №123648; Боровиков П.Н., Самарский В.Н. Подводная техника морских нефтепромыслов. - Л.: Судостроение, 1984; Вишняков В.А., Меренов И.В. Глубоководная водолазная техника. - Л.: Судостроение, 1982; Проблемы исследования и освоения Мирового океана. - Л.: Судостроение, 1979 и другие).
Из известных устройств наиболее близким к предлагаемому является "радиогидроакустическое устройство для дистанционного отсоединения подводного изделия и контроля его местоположения на поверхности моря" (патент РФ №2167430, G 01 S 3/00, 2000), которое и выбрано в качестве прототипа.
Указанное устройство содержит командный и исполнительный блоки, при этом в состав командного блока входят: канал излучения гидроакустических кодированных широкополосных сигналов управления, канал приема радиосигнала и канал измерения текущей дистанции, а в состав исполнительного блока входят: канал приема гидроакустических кодированных широкополосных сигналов управления, канал исполнения сигнала управления и канал излучения радиосигнала. Совокупность данных признаков обеспечивает возможность дистанционно отсоединять подводное изделие, визуально обозначать его местоположение, с высокой точностью определять расстояние между судном и исполнительным блоком.
Технической задачей изобретения является повышение надежности управления исполнительным блоком путем использования сложных сигналов с фазовой манипуляцией.
Поставленная задача решается тем, что в радиогидроакустическом устройстве для дистанционного отсоединения подводного изделия и контроля его местоположения на поверхности моря, содержащем командный и исполнительный блоки, при этом в состав командного блока входят канал излучения гидроакустических кодированных широкополосных сигналов управления, канал приема радиосигнала и канал измерения текущей дистанции, а в состав исполнительного блока входят канал приема гидроакустических кодированных широкополосных сигналов управления, канал исполнения сигнала управления и канал излучения радиосигнала, при этом канал излучения гидроакустических кодированных широкополосных сигналов управления командного блока содержит последовательно электрически соединенные генератор кодирования широкополосных сигналов управления, усилитель мощности и гидроакустический излучатель кодированных широкополосных сигналов управления, канал приема радиосигнала содержит последовательно электрически соединенные приемную антенну и радиоприемник, ответный сигнал, прошедший через устройство обработки ответных сигналов канала приема радиосигнала, подается на второй вход формирователя строба дистанции, канал измерения текущей дистанции содержит последовательно электрически соединенные таймер, генератор запросных сигналов, линию задержки, формирователь строба дистанции, ключ, двоично-десятичный счетчик и индикатор текущей дистанции, при этом ко второму входу ключа подключен генератор счетных импульсов, генератор кодированных широкополосных сигналов управления запускает таймер канала измерения текущей дистанции, канал приема гидроакустических кодированных широкополосных сигналов управления исполнительного блока содержит последовательно электрически соединенные гидрофон и усилитель, последовательно электрически соединенные дешифратор кодированных широкополосных сигналов управления и электромагнитное реле, являющееся выходом данного канала, электронный ключ и механический размыкатель, подключенные к выходу электромагнитного реле параллельно друг другу, канал исполнения сигнала управления содержит последовательно электрически соединенные синхронизатор и электронный ключ, при этом синхронизатор с помощью электронного ключа канала исполнения сигнала управления подключает высокоемкостной многократно перезаряжаемый аккумулятор к радиопередатчику, канал излучения радиосигнала содержит последовательно электрически соединенные радиопередатчик и радиопередающую антенну, проблесковый маяк и фал, при этом в момент всплытия исполнительного блока на поверхность моря включается проблесковый маяк, а электрическое питание усилителя, дешифратора и электронного ключа осуществляется непрерывно, радиопередатчика - периодически, проблескового маяка - только после всплытия исполнительного блока на поверхность моря, с помощью высокоемкостного и многократно перезаряжаемого аккумулятора, при этом электронные элементы всех каналов исполнительного блока размещены в герметичном отсеке, а для включения блока приема сигналов в дежурный режим используется наружный съемный ключ, соединяемый с механическим размыкателем, в командном блоке в качестве линии задержки используется регулируемая линия задержки, в исполнительном блоке в качестве герметичного отсека используется пластиковый корпус заданной формы, обладающий собственной положительной плавучестью, а необходимый запас фала раскреплен вокруг пластикового корпуса, с помощью усилителя осуществляется усиление сигналов на характерных частотах F2 - для скопления крабов, F3 - для скопления рыб, F4 - для акустического предвестника подводного землетрясения, а в дешифраторе гидроакустических сигналов производится их дешифрация, с выхода дешифратора гидроакустических сигналов сигнал управления подается на электромагнитное реле, при этом электрическое питание дешифратора гидроакустических сигналов осуществляется непрерывно с помощью высокоемкостного и многократно перезаряжаемого аккумулятора, в момент всплытия исполнительного блока на поверхность моря срабатывает фальшфеер, генератор кодированных широкополосных сигналов управления выполнен в виде последовательно включенных формирователя модулирующего кода и фазового манипулятора, второй вход которого соединен с выходом задающего генератора, а выход подключен к входу усилителя мощности, при этом второй выход формирователя модулирующего кода подключен к входу таймера, канал приема гидроакустических кодированных широкополосных сигналов управления снабжен последовательно подключенными к выходу усилителя первым перемножителем, второй вход которого соединен с выходом фильтра нижних частот, узкополосным фильтром, вторым перемножителем, второй вход которого соединен с выходом усилителя, и фильтром нижних частот, выход которого подключен к входам дешифраторов кодированных широкополосных сигналов управления и гидроакустических сигналов, причем в качестве гидроакустических кодированных широкополосных сигналов управления используются сложные сигналы с фазовой манипуляцией.
Структурные схемы устройства представлены на фиг.1 и 2. Временные диаграммы, поясняющие работу устройства, изображены на фиг.3 и 4.
Устройство содержит командный 1 и исполнительный 2 блоки. При этом в состав командного блока 1 входят: канал 3 излучения гидроакустических кодированных широкополосных сигналов управления, канал 4 приема радиосигнала и канал 5 измерения текущей дистанции. Канал 3 излучения гидроакустических кодированных широкополосных сигналов управления содержит последовательно электрически соединенные генератор 9 кодированных широкополосных сигналов управления, усилитель 10 мощности и гидроакустический излучатель 11 кодированных широкополосных сигналов управления. Генератор 9 кодированных широкополосных сигналов управления выполнен в виде последовательно электрически соединенных формирователя 9.2 модулирующего кода и фазового манипулятора 9.3, второй вход которого соединен с выходом задающего генератора 9.1, а выход подключен к входу усилителя 10 мощности.
Канал 4 приема радиосигнала содержит последовательно электрически соединенные приемную антенну 12, радиоприемник 13 и устройство 14 обработки ответных сигналов.
Канал 5 измерения текущей дистанции содержит последовательно электрически соединенные таймер 15, к входу которого подключен второй выход формирователя 9.2 модулирующего кода, генератор 16 запросных сигналов, регулируемую линию задержки 17, формирователь 18 строба дистанции, второй вход которого соединен с выходом устройства 14 обработки ответных сигналов, ключ 19, второй вход которого соединен с выходом генератора 22 счетных импульсов, двоично-десятичный счетчик 20 и индикатор 21 текущей дистанции.
Исполнительный блок 2 включает канал 6 приема гидроакустических кодированных широкополосных сигналов управления, канал 7 исполнения сигнала управления и канал 8 излучения радиосигнала.
Канал 6 приема гидроакустических кодированных широкополосных сигналов управления содержит последовательно электрически соединенные гидрофон 23, усилитель 24, демодулятор 38, дешифратор 25 кодированных широкополосных сигналов управления, электромагнитное реле 26, второй вход которого через дешифратор 27 гидроакустических сигналов соединен с выходом демодулятора 38, и механический размыкатель 30.
Демодулятор 38 содержит последовательно подключенные к выходу усилителя 24 первый перемножитель 38.1, второй вход которого соединен с выходом фильтра 38.4 нижних частот, узкополосный фильтр 38.3, второй перемножитель 38.2, второй вход которого соединен с выходом усилителя 24, и фильтр 38.4 нижних частот, выход которого является выходом демодулятора и подключен к входам дешифраторов 25 и 27.
Канал 7 исполнения сигнала управления содержит последовательно электрически соединенные синхронизатор 28 и электронный ключ 29, являющийся выходом данного канала.
Канал 8 излучения радиосигнала включает в себя последовательно электрически соединенные радиопередатчик 31, к входу которого подключен электронный ключ 29, и радиопередающую антенну 32.
При этом электрическое питание усилителя 24, дешифраторов 25 и 27, электромагнитного реле 26, синхронизатора 28 и электронного ключа 29 осуществляется непрерывно с помощью высокоемкостного и многократно перезаряжаемого аккумулятора 33, радиопередатчика 31 - периодически, проблескового маяка 34 - только после всплытия исполнительного блока 2 на поверхности моря. Исполнительный блок 2 содержит также проблесковый маяк 34, аккумулятор 33, наружный съемный ключ 35, соединяемый с механическим размыкателем 30 и включающий исполнительный блок 2 в дежурный режим, фалшьфеер 36, используемый для более эффективного визуального контроля местоположения исполнительного блока 2 на поверхности моря, и необходимый запас фала 37, раскрепленный вокруг герметичного пластикового корпуса заданной формы исполнительного блока 2.
Устройство работает следующим образом.
В командном блоке 1 формирователем 9.2 модулирующего кода устанавливается код M(t) (фиг.4.б), соответствующий номеру выбранного исполнительного блока 2, который поступает на первый вход фазового манипулятора 9.3. На второй вход последнего подается звуковое колебание (фиг.4,а)
uc(t)=Uc·cos(2πfct+ϕc), 0≤t≤Tc,
где Uc, fc, ϕc, Tc - амплитуда, несущая частота, начальная фаза и длительность звукового колебания,
с выхода задающего генератора 9.1. На выходе фазового манипулятора 9.3 образуется сложный сигнал с фазовой манипуляцией (ФМн) (кодированный широкополосный сигнал управления) (фиг.4.в)
u1(t)=Uc·cos[2πfct+ϕk(t)+ϕc], 0≤t≤Tc,
где ϕk(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t) (фиг.4,б), причем ϕk(t)=const при кτэ<t<(к+1)τэ, и может изменяться скачком при t=кτэ, т.е. на границах между элементарными посылками (к=1, 2,..., N);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тc(Tc=N·τэ),
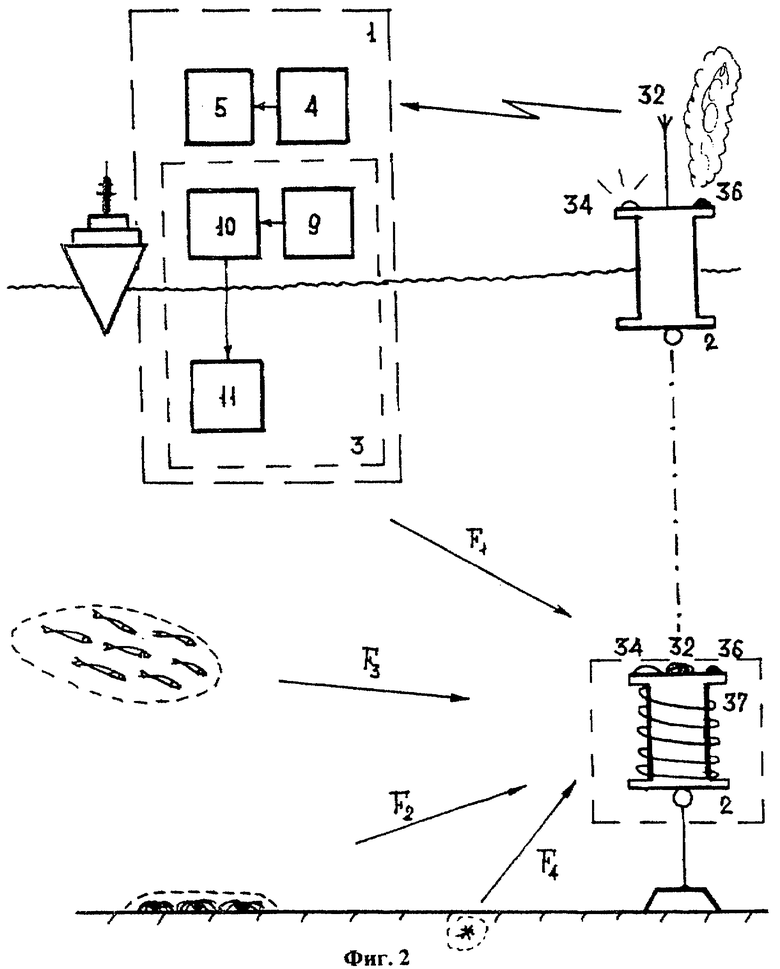
который поступает на вход усилителя 10 мощности и усиливается до необходимого уровня, а затем с помощью гидроакустического излучателя 11 ненаправленно, в том числе и в сторону исполнительного блока 2, излучается гидроакустический кодированный широкополосный сигнал управления (сложный ФМн-сигнал) на частоте F1=fc (фиг.2).
Одновременно с этим формирователь 9.2 модулирующего кода запускает таймер 15 канала 5 измерения текущей дистанции. Последний управляет работой генератора 16 запросных сигналов.
Сложный ФМн-сигнал U1(t) излучается в водную среду периодически, при этом период следования сигналов запроса определяет темп получения данных о текущей дистанции до исполнительного блока 2.
В канале 6 приема гидроакустических кодированных широкополосных сигналов управления с помощью гидрофона 23 осуществляется прием сложного ФМн-сигнала U1(t) на частоте F1. В усилителе 24 производится усиление данного сигнала до необходимого уровня, который поступает на вход демодулятора 38 принимаемого ФМн-сигнала. Последний состоит из перемножителей 38.1 и 38.2, узкополосного фильтра 38.3 и фильтра 38.4 нижних частот.
На второй вход перемножителя 38.2 с выхода узкополосного фильтра 38.3 подается опорное напряжение (фиг.4,г)
u0(t)=U0·cos(2πfсt+ϕс), 0≤t≤Tс.
На выходе перемножителя 38.2 образуется суммарное напряжение
u∑(t)=UH·cosϕk(t)+UH·cos[4πfct+ϕk(t)+2ϕc],
где 
K1 - коэффициент передачи перемножителя.
Из полученного суммарного напряжения фильтром 38.4 нижних частот выделяется низкочастотное напряжение (фиг.4,д)
uH(t)=UH·cosϕk(t), 0≤t≤Tc,
которое поступает на второй вход перемножителя 38.1. На выходе последнего образуется гармоническое напряжение (фиг.4,г)
u0(t)=U1·cos(2πfct+ϕc)+U1·cos[2πfct+2ϕk(t)+ϕc]=2U1·cos(2πfct+ϕc)=U0·cos(2πfct+ϕc),
где  ; 2U1=U0,
; 2U1=U0,
которое используется в качестве опорного напряжения и поступает на второй вход перемножителя 38.2. При этом демодулятор 38 ФМн-сигналов работает в двух режимах: переходном (начальном) и устойчивом (рабочем). При включении питания в демодуляторе 38 возникают переходные процессы, которые характеризуются наличием большого количества гармонических составляющих, в которых присутствует и гармоническое колебание на частоте fc. Это колебание выделяется узкополосным фильтром 38.3 и подается на второй вход перемножителя 38.2. После захвата гармонического колебания на частоте fc демодулятор 38 переходит в режим устойчивой работы, который описан выше.
Следовательно, опорное напряжение, необходимое для синхронного детектирования принимаемого сложного ФМн-сигнала, выделяется непосредственно из самого принимаемого сигнала. При этом демодулятор 38 по сравнению с другими демодуляторами (схемы Пистолькорса А.А., Сидорова В.И., Травина Г.А., Костаса Д.Ф.), которые также обеспечивают выделение опорного напряжения непосредственно из принимаемого ФМн-сигнала, свободен от явления «обратной работы» и позволяет достоверно выделять модулирующий код M(t) из принимаемого ФМн-сигнала.
В дешифраторе 25 проверяется соответствие модулирующего кода M(t) установленному коду. С выхода дешифратора 25 сигнал управления подается на электромагнитное реле 26 и далее на механический размыкатель 30, который отсоединяет исполнительный блок 2 от подводного изделия.
Параллельно с этим с помощью гидрофона 23 канала 6 приема гидроакустических кодированных широкополосных сигналов управления осуществляется прием сигналов в зависимости от сферы применения устройства (например, сигналов на характерных частотах: F2 - для скопления крабов, F3 - для скопления рыб, F4 - для акустического «предвестника» подводного землетрясения и т.д.). В дешифраторе 27 производится дешифрация сигналов на частотах F2, или F3, или F4 и т.д. С выхода дешифратора 27 сигнал управления подается на электромагнитное реле 26, которое приводит в действие механический размыкатель 30. После механического отсоединения от подводного изделия исполнительный блок 2, благодаря своей положительной плавучести, начинает всплывать на поверхность моря, при этом разматывается запас фала 37, предварительно раскрепленный на пластиковом корпусе определенной формы исполнительного блока 2. В момент всплытия исполнительного блока 2 на поверхность моря включается проблесковый маяк 34, срабатывает фальшфеер 36 и осуществляется визуальный поиск исполнительного блока 2.
В случае соответствия кодовой группы сигнала установленному коду дешифратор 25 запускает синхронизатор 28, который с помощью электронного ключа 29 канала 7 исполнения сигнала управления подключает высокоемкостной и многократно перезаряжаемый аккумулятор 33 к радиопередатчику 31. Период и временная диаграмма подключений соответствует темпу запросов на обновление данных о текущем значении дистанции. При этом основной функцией синхронизатора 28 является включение радиопередатчика 31 на некоторый временной интервал раньше, чем поступит очередной запросный сигнал, ретранслируемый по радиоканалу. Величина этого интервала определяется временем установления переходных процессов в системе «радиопередатчик - радиоприемник». Синхронизация осуществляется автоматически каждым очередным запросным сигналом.
Измерение текущей дистанции осуществляется с помощью формирователя 18 строба дистанции. На его первый (запускающий) вход с выхода регулируемой линии 17 задержки, одновременно с началом излучения в водную среду гидроакустического кодированного широкополосного сигнала управления, поступает сигнал запроса.
Ответный сигнал исполнительного блока 2, имеющий задержку на время распространения звуковой волны, переизлученный по радиоканалу, принятый радиоприемной антенной 12 и радиоприемником 13, а также прошедший через устройство 14 обработки ответных, сигналов канала 4 приема радиосигнала, подается на второй (останавливающий) вход формирователя 18 строба дистанции. Таким образом, формируется импульс (строб) с длительностью, пропорциональной текущей дистанции, от гидроакустического излучателя 11 командного блока 1 до радиопередающей антенны 32 исполнительного блока 2 данного устройства (фиг.3,б).
В связи с неизбежными задержками, возникающими при прохождении сигнала по фильтрующим цепям и пороговым схемам, накапливается систематическая ошибка в определении текущей дистанции. Для ее ликвидации используется узел, функционально представляющий собой регулируемую линию задержки 17. Кроме того, ее использование в канале 5 измерения текущей дистанции позволяет осуществлять его предварительную калибровку, когда на фиксированном значении дистанции между командным 1 и исполнительным 2 блоками «подстраивается» длительность строба дистанции и «компенсируется» систематическая приборная ошибка.
Пересчет длительности строба в значение текущей дистанции осуществляется при помощи генератора 22 счетных импульсов, частота следования которых задается численно равной скорости звука в морской среде. Последовательность счетных импульсов через ключ 19, замыкаемый на время длительности строба, подается на вход двоично-десятичного счетчика 20. При этом результат счета, являющийся значением текущей дистанции, отображается на индикаторе 21 текущей дистанции.
В случае пропуска нескольких запросных сигналов (окончание работы) синхронизатор 28 возвращает исполнительный блок 2 в дежурный (микромощный) режим и подключение радиопередатчика 31 к аккумулятору 33 прекращается.
После подъема исполнительного блока 2 на борт судна осуществляется, при необходимости, перезарядка высокоемкостного и многократно перезаряжаемого аккумулятора 33 или с помощью наружного съемного ключа 35, соединяемого с механическим размыкателем 30, производится подготовка устройства к дальнейшей работе.
На фиг.2, 3,а представлены схемы проведения испытаний радиогидроакустического устройства при приеме кодированных широкополосных сигналов управления на частоте F1 сигналов скоплений краба на частоте F2, скоплений рыб на частоте F3, взрывного источника, имитирующего акустический «предвестник» подводного землетрясения, на частоте F4.
Таким образом, предлагаемое устройство по сравнению с прототипом обеспечивает повышение надежности управления исполнительным блоком. Это достигается использованием сложных сигналов с фазовой манипуляцией.
Данные сигналы открывают новые возможности в управлении исполнительным блоком. Они позволяют применять новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность разделять сигналы, действующие в одной и той же полосе частот и в одни и те же промежутки времени.
С точки зрения обнаружения сложные ФМн-сигналы обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн-сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного ФМн-сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОГНОЗИРОВАНИЯ ВОЗМОЖНОСТИ ВОЗНИКНОВЕНИЯ ЦУНАМИ И ОПРЕДЕЛЕНИЕ ЕГО ЭПИЦЕНТРА | 2005 |
|
RU2300787C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТЕПЕНИ ОПАСНОСТИ ЦУНАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2288487C1 |
| РАДИОГИДРОАКУСТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОТСОЕДИНЕНИЯ ПОДВОДНОГО ИЗДЕЛИЯ И КОНТРОЛЯ ЕГО МЕСТОПОЛОЖЕНИЯ НА ПОВЕРХНОСТИ МОРЯ | 2000 |
|
RU2167430C1 |
| РАДИОГИДРОАКУСТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОТСОЕДИНЕНИЯ ЕГО ОТ ПОДВОДНОГО ИЗДЕЛИЯ | 2001 |
|
RU2218578C2 |
| СИСТЕМА ДЛЯ РАДИОТЕЛЕФОННЫХ СООБЩЕНИЙ НА АВТОМАГИСТРАЛЯХ | 2009 |
|
RU2395121C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2006 |
|
RU2324957C1 |
| СИСТЕМА ДЛЯ РАДИОТЕЛЕФОННЫХ СООБЩЕНИЙ НА АВТОМАГИСТРАЛЯХ | 2011 |
|
RU2471244C1 |
| СТАНЦИЯ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2007 |
|
RU2346289C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КОЛЕБАНИЙ ВОДНОЙ ПОВЕРХНОСТИ | 2006 |
|
RU2319984C2 |
| СИСТЕМА ДЛЯ ПРЕДУПРЕЖДЕНИЯ О ЗЕМЛЕТРЯСЕНИЯХ И ЦУНАМИ | 2005 |
|
RU2290671C1 |


Предлагаемое устройство относится к области гидроакустической техники и может быть использовано в гидроакустических системах дистанционного управления, а также в подсистемах гидроакустического телеуправления. Техническим результатом изобретения является повышение надежности управления исполнительным блоком. Радиогидроакустическое устройство для дистанционного отсоединения подводного изделия и контроля его местоположения на поверхности моря содержит командный 1 и исполнительный 2 блоки. При этом в состав командного блока 1 входят: канал 3 излучения гидроакустических кодированных широкополосных сигналов управления, генератор 9 кодированных широкополосных сигналов управления, включающий формирователь 9.2 модулирующего кода, задающий генератор 9.1 и фазовый манипулятор 9.3. Исполнительный блок 2 содержит канал 6 приема гидроакустических кодированных широкополосных сигналов управления, в состав которого входят перемножители 38.1 и 38.2, узкополосный фильтр 38.3 и фильтр 38.4 нижних частот. В качестве гидроакустических кодированных сигналов управления используются сложные сигналы с фазовой модуляцией. 4 ил.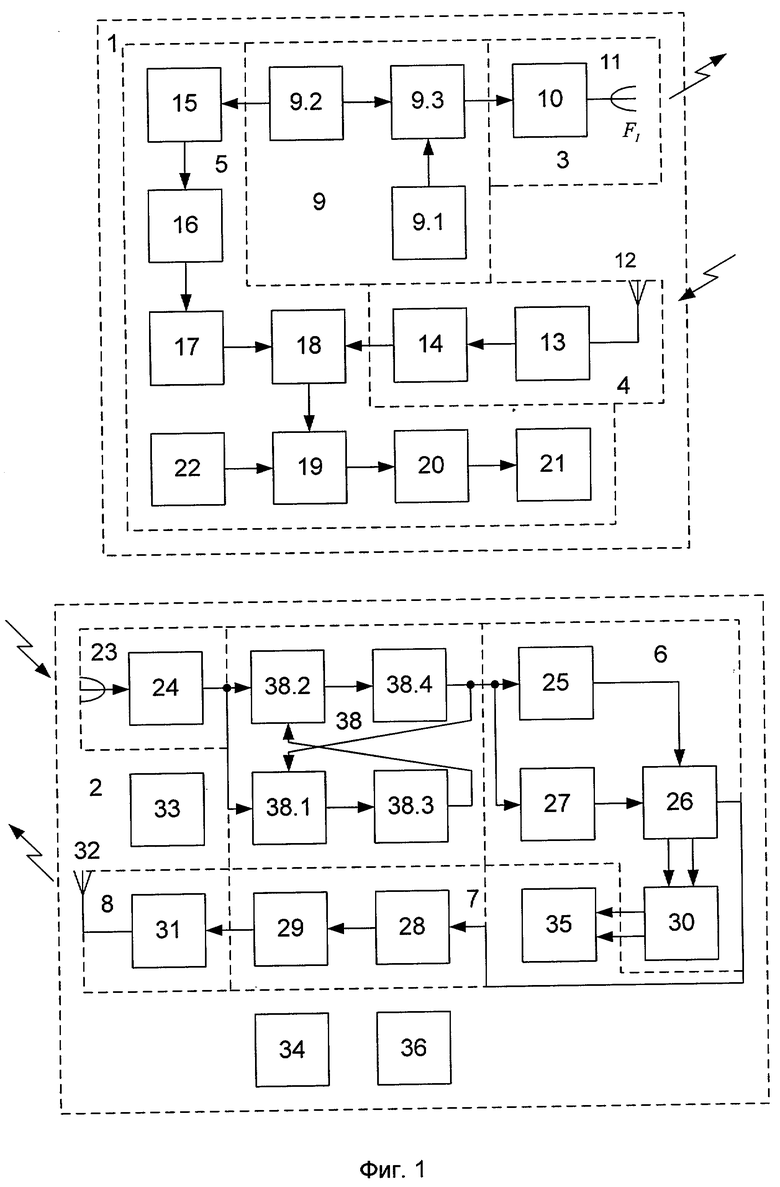
Радиоакустическое устройство для дистанционного отсоединения подводного изделия и контроля его местоположения на поверхности моря, содержащее командный и исполнительный блоки, при этом в состав командного блока входят канал излучения гидроакустических кодированных широкополосных сигналов управления, канал приема радиосигнала и канал измерения текущей дистанции, а в состав исполнительного блока входят канал приема гидроакустических кодированных широкополосных сигналов управления, канал исполнения сигнала управления и канал излучения радиосигнала, при этом канал излучения гидроакустических кодированных широкополосных сигналов управления командного блока содержит последовательно электрически соединенные генератор кодированных широкополосных сигналов управления, усилитель мощности и гидроакустический излучатель кодированных широкополосных сигналов управления, канал приема радиосигнала содержит последовательно электрически соединенные приемную антенну и радиоприемник, ответный сигнал, прошедший через устройство обработки ответных сигналов канала приема радиосигнала, подается на второй вход формирователя строба дистанции, канал измерения текущей дистанции содержит последовательно электрически соединенные таймер, генератор запросных сигналов, линию задержки, формирователь строба дистанции, ключ, двоично-десятичный счетчик и индикатор текущей дистанции, при этом ко второму входу ключа подключен генератор счетных импульсов, генератор кодированных широкополосных сигналов управления запускает таймер канала измерения текущей дистанции, канал приема гидроакустических кодированных широкополосных сигналов управления исполнительного блока содержит последовательно электрически соединенные гидрофон и усилитель, последовательно электрически соединенные дешифратор кодированных широкополосных сигналов управления и электромагнитное реле, являющееся выходом данного канала, электронный ключ и механический размыкатель, подключенные к выходу электромагнитного реле параллельно друг другу, канал исполнения сигнала управления содержит последовательно электрически соединенные синхронизатор и электронный ключ, при этом синхронизатор с помощью электронного ключа канала исполнения сигнала управления подключает высокоемкостный и многократно перезаряжаемый аккумулятор к радиопередатчику, канал излучения радиосигнала содержит последовательно электрически соединенные радиопередатчик и радиопередающую антенну, проблесковый маяк и фал, при этом в момент всплытия исполнительного блока на поверхность моря включается проблесковый маяк, а электрическое питание усилителя, дешифратора и электронного ключа осуществляется непрерывно, радиопередатчика - периодически, проблескового маяка - только после всплытия исполнительного блока на поверхность моря с помощью высокоемкостного и многократно перезаряжаемого аккумулятора, при этом электронные элементы всех каналов исполнительного блока размещены в герметичном отсеке, а для включения блока приема сигналов в дежурный режим используется наружный съемный ключ, соединяемый с механическим размыкателем, в командном блоке в качестве линии задержки используется регулируемая линия задержки, в исполнительном блоке в качестве герметичного отсека используется пластиковый корпус заданной формы, обладающий собственной положительной плавучестью, а необходимый запас фала раскреплен вокруг пластикового корпуса, с помощью усилителя осуществляется усиление сигналов на характерных частотах F2 - для скопления крабов, F3 - для скопления рыб, F4 - для акустического предвестника подводного землетрясения, а в дешифраторе гидроакустических сигналов производится их дешифрация, с выхода дешифратора гидроакустических сигналов сигнал управления подается на электромагнитное реле, при этом электрическое питание дешифратора гидроакустических сигналов осуществляется непрерывно с помощью высокоемкостного и многократно перезаряжаемого аккумулятора, в момент всплытия исполнительного блока на поверхность моря срабатывает фальшфеер, отличающееся тем, что генератор кодированных широкополосных сигналов управления выполнен в виде последовательно включенных формирователя модулирующего кода и фазового манипулятора, второй вход которого соединен с выходом задающего генератора, а выход подключен к входу усилителя мощности, при этом второй выход формирователя модулирующего кода подключен к входу таймера, канал приема гидроакустических кодированных широкополосных сигналов управления снабжен последовательно подключенными к выходу усилителя первым перемножителем, второй вход которого соединен с выходом фильтра нижних частот, узкополосным фильтром, вторым перемножителем, второй вход которого соединен с выходом усилителя, и фильтром нижних частот, выход которого подключен к входам дешифраторов кодированных широкополосных сигналов управления и гидроакустических сигналов, причем в качестве гидроакустических кодированных широкополосных сигналов управления используются сложные сигналы с фазовой манипуляцией.
| РАДИОГИДРОАКУСТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОТСОЕДИНЕНИЯ ПОДВОДНОГО ИЗДЕЛИЯ И КОНТРОЛЯ ЕГО МЕСТОПОЛОЖЕНИЯ НА ПОВЕРХНОСТИ МОРЯ | 2000 |
|
RU2167430C1 |
| РАДИОГИДРОАКУСТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОТСОЕДИНЕНИЯ ЕГО ОТ ПОДВОДНОГО ИЗДЕЛИЯ | 2001 |
|
RU2218578C2 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2119172C1 |
| Способ приготовления вафельного листа | 1984 |
|
SU1214050A1 |
| US 3717844 A1, 20.02.1973. | |||

