Изобретение относится к системам выведения в заданную точку и управления подводными аппаратами при помощи акустических средств, в частности, к способу и устройству для дистанционного контроля и управления частично автономными подвижными необитаемыми подводными аппаратами.
В настоящее время известны различные системы определения местоположения объекта под водой, в которых используются, в частности, акустические сигналы.
Французский патент N 2643463 описывает способ и устройство абсолютного позиционирования или выведения в заданную точку подводного аппарата, излучающего акустические сигналы. Эта система в процессе своего функционирования использует два надводных корабля, которые точно позиционированы в абсолютной системе координат. Один из упомянутых надводных кораблей принимает сигналы, исходящие из средств, формирующих эту абсолютную систему координат, сигналы от подводного аппарата и сигналы, передаваемые с другого упомянутого выше надводного корабля. В соответствии со способом, описанным в упомянутом патенте, на одном из упомянутых надводных кораблей осуществляется прием и обработка информации, полученной из принятых этим кораблем сигналов и касающейся, в частности, положения двух упомянутых надводных кораблей в упомянутой абсолютной системе координат и их относительного положения, и производится расчет абсолютного положения и относительного положения по отношению к одному из упомянутых надводных кораблей упомянутого подводного аппарата в функции акустических сигналов, излучаемых этим подводным аппаратом и принимаемых обоими надводными кораблями.
Описанная в упомянутом выше патенте система дает возможность оператору, находящемуся на одном из двух упомянутых надводных кораблей, точно знать текущее положение данного подводного аппарата. Однако упомянутая система не предназначена для того, чтобы обеспечивать возможность для данного подводного аппарата получать информацию о своем собственном положении. Общая проблема в данном случае состоит в необходимости предоставления в распоряжение пользователя системы, позволяющей некоторому устройству контроля, располагающемуся вне данного подводного аппарата, получать информацию о положении этого подводного аппарата или этих подводных аппаратов, а также обеспечивать эти подводные аппараты достаточно точной информацией в каждый момент времени об инструкциях относительно дальнейшей траектории их движения в абсолютной или относительной системе координат в данном оперативном районе.
Из статьи " Новый способ использования спутниковой системы GPS для управления подводными аппаратами", J.W.Young-Berg, "Навигация", N 159, июль 1992 г., а также американского патента N 5119341 (Joungberg), известна система, обеспечивающая возможность выдачи соответствующей навигационной информации на автономные подводные аппараты. Эта система имеет в своем составе дрейфующие буи, которые преобразуют радиосигналы спутниковой навигационной системы GPS в акустические сигналы, распространяющиеся в толще воды, таким образом, чтобы автономный подводный аппарат, принимающий эти акустические сигналы, излучаемые дрейфующими буями, имел возможность определить свое положение в пространстве, измеряя псевдодистанции, которые отделяют этот аппарат от некоторого количества упомянутых выше дрейфующих буев, а также имея информацию о положении каждого такого буя, которое определяется каждым из этих буев, и которое передается на данный подводный аппарат при помощи соответствующих акустических сигналов.
Хотя устройство, описанное в упомянутом выше патенте, позволяет подводному аппарату определить свое местоположение в абсолютной системе координат, известные системы позиционирования, тем не менее, не обеспечивают возможностей дистанционного контроля и управления автономным подводным аппаратом.
Кроме того, представленные в упомянутом выше патенте технические решения не дают возможности обеспечить достаточно точное управление соответствующим подводным аппаратом, принимая во внимание весьма значительный по интенсивности и объему поток информации, передаваемой по различным подводным акустическим каналам. Кроме того, это устройство в целом не вполне целесообразно, ввиду необходимости передачи на подводный аппарат весьма большого количества информации.
Таким образом, проблема заключается в том, чтобы обеспечить возможность наблюдения и дистанционного контроля и координации одного или нескольких необитаемых подводных аппаратов, задача которых состоит в выведении в некоторую зону или в одно или несколько мест расположения для определенных целей, например для выполнения задачи измерения физических или химических параметров окружающей среды или измерения подводных глубин.
Задачей таких подводных аппаратов может являться также наблюдение, получение разведывательных данных относительно наземных или морских объектов различного характера, располагающихся в непосредственной близости от определенного морского района, а также создание пассивных радиотехнических и акустических помех и радиотехнического или акустического противодействия.
Решение данной проблемы заключается в создании способа и устройства для дистанционного контроля и управления одним или несколькими необитаемыми подводными аппаратами, которые могут быть использованы, в частности, в целях получения разведывательной информации. Системы упомянутого выше дистанционного контроля и управления могут также обеспечивать самостоятельный вывод этих аппаратов в заданную точку пространства или получение разведывательной информации, и содержат по меньшей мере один, а в предпочтительном варианте реализации по меньшей мере два необитаемых плавучих подвижных аппарата, т.е. способных дрейфовать по течению и/или быть самоходным, причем каждый из этих подвижных аппаратов содержит по меньшей мере один первый однонаправленный приемник сообщений, передаваемых первыми радиосигналами при помощи по меньшей мере одного первого передатчика, представляющего собой, например, спутник навигационной системы, являющейся элементом сети навигационных спутников, например, системы GPS, каждый из этих плавучих подвижных аппаратов содержит по меньшей мере один двунаправленный приемопередатчик двухсторонней связи при помощи вторых радиосигналов по меньшей мере с одним вторым приемопередатчиком, например с приемопередатчиком спутника, предназначенного для автоматизированной передачи сообщений и представляющего собой часть системы геостационарных спутников, принадлежащего, например, к системе спутников ИНМАРСАТ. Упомянутое устройство содержит, кроме того, по меньшей мере один наземный приемопередатчик двухсторонней связи при помощи третьих радиосигналов с упомянутым вторым приемопередатчиком типа связного спутника. При этом каждый из упомянутых плавучих аппаратов содержит по меньшей мере один приемопередатчик или преобразователь информационных сигналов и сигналов синхронизации, например акустических сигналов, причем упомянутый необитаемый подводный аппарат содержит по меньшей мере один приемопередатчик или преобразователь информационных сигналов или сигналов синхронизации, например, акустических сигналов, совместимых с упомянутым приемопередатчиком упомянутого плавучего аппарата.
В другом варианте упомянутый первый передатчик первых радиосигналов позиционирования или определения местоположения упомянутых плавучих аппаратов может представлять собой наземный передатчик, например передатчик системы AXYLE. Такое техническое решение может оказаться особенно выгодным для дистанционного контроля и управления упомянутым подводным необитаемым аппаратом в непосредственной близости от берегов и может обладать предельно высокой точностью. В этом случае имеется возможность предусмотреть схему коррекции отклонения положения между наземной антенной, обеспечивающей прием упомянутых радиосигналов первого типа от упомянутого плавучего аппарата и упомянутым преобразователем, например акустическим преобразователем информационных сигналов и сигналов синхронизации, принимая во внимание сигналы, выдаваемые датчиками крена, продольного наклона, курса и глубины погружения, установленными на борту упомянутого плавучего аппарата. Такая конфигурация данной системы может обеспечить возможность контроля и управления упомянутым автономным подводным необитаемым аппаратом в режиме подводной навигации высокой точности.
В альтернативном по отношению к спутниковой навигационной системе варианте упомянутые вторые радиосигналы могут представлять собой сигналы наземной или поверхностной системы связи, обеспечивающей возможность обмена соответствующей информацией между радиобуями или группой радиобуев и одним или несколькими устройствами контроля, располагающимися на других объектах, таких как плавучих аппараты, надводные корабли или самолеты.
Такая конфигурация позволяет обеспечить координированное и весьма эффектное управление различными частично автономными подводными аппаратами, используя весьма высокую скорость распространения радиоволн по сравнению со скоростью распространения акустических волн под водой.
Упомянутые информационные сигналы и сигналы синхронизации могут использоваться для обмена между упомянутым плавучим аппаратом и упомянутым подводным автономным аппаратом посредством, например, упомянутых преобразователей акустических сигналов или, в альтернативном варианте, при помощи оптико-волоконных систем связи, развернутых между упомянутым подводным аппаратом и упомянутым плавучим аппаратом, или при помощи связи по электрическим проводам в соответствующей защитной оболочке, развернутым с борта упомянутого подводного аппарата и/или с борта упомянутого плавающего на поверхности аппарата.
В одном из специфических способов реализации упомянутый плавающий на поверхности аппарат может содержать тактовый генератор синхронизации, основанный на приеме упомянутых первых радиосигналов, излучаемых упомянутым первым передатчиком, например, установленным на спутнике навигационной системы GPS.
В предпочтительном варианте реализации упомянутые подводные аппараты содержат средства удержания, постановки на якорь по меньшей мере одного плавучего аппарата и содержат средства освобождения или удаления упомянутого плавучего аппарата.
Решение поставленной проблемы состоит также в использовании устройством в соответствии с предлагаемым изобретением способа дистанционного контроля и управления частично автономным необитаемым подводным аппаратом и определения его местоположения, который содержит следующие операции:
подготавливают к использованию устройство, соответствующее предлагаемому изобретению;
в операции регистрации производят запоминание в по меньшей мере одном запоминающем устройстве вычислителя упомянутого подводного аппарата законов поведения этого аппарата в соответствии с различными способами навигации и в предпочтительном варианте в соответствии по меньшей мере с одним способом отслеживания траектории движения, содержащим законы управления по скорости перемещения, курсу и глубине погружения в функции времени, глубины погружения, углового положения или дистанции от данного аппарата до известных подводных препятствий перед отдачей концов или отходом с базы данного аппарата или при помощи передачи в водной среде посредством упомянутых вторых и третьих радиосигналов, которые передаются через водную среду при помощи упомянутых преобразователей плавучего аппарата;
в операции передачи излучают предпочтительно с одинаковыми интервалами в подводную среду кодированных акустических сигналов, характеризующих изменения режима навигации или инструкций по управлению одним или несколькими подводными аппаратами;
в операции вычислений бортовой вычислитель упомянутого подводного аппарата генерирует на основе упомянутых акустических сигналов, излучаемых упомянутыми плавучими аппаратами, сигналы контроля и управления, соответствующие последнему принятому способу или режиму навигации, и передает при помощи своего акустического преобразователя некоторую последовательность кодированных акустических импульсов, характеризующих текущее состояние данного аппарата (курс, угловое положение, скорость, глубина погружения и т.д.), измеренное непосредственно на его борту.
В предпочтительном варианте способ в соответствии с предлагаемым изобретением может быть применен в качестве средства обезвреживания мин. Этот вариант использования, который позволяет наиболее полно воспользоваться возможностями подводной навигационной системы высокой точности, о которой уже было сказано выше, позволит отказаться от использования акустической или оптической (лазерной) головки самонаведения большой дальности действия. Заряд, размещенный на борту подводного робота, может быть подорван просто в географической близости от точки цели, соответствующей вероятному расположению мины, которую необходимо обезвредить. Эта вероятная точка расположения мины может быть предварительно и достаточно точно определена при помощи гидролокатора переднего или бокового обзора, размещенного на борту подвижного подводного разведывательного аппарата, использующего систему в соответствии с предлагаемым изобретением.
Другими словами, данное изобретение состоит в использовании способа дистанционного контроля и управления автономным необитаемым подводным аппаратом, который включает следующие операции:
подготавливают к использованию устройство, соответствующее данному изобретению:
регистрируют в памяти по меньшей мере одного запоминающего устройства вычислителя, расположенного на борту упомянутого подводного аппарата, по меньшей мере одно положение или координаты одной цели и, в предпочтительном варианте, по меньшей мере одну форму траектории подхода, и по меньшей мере одно положение исходной точки или точки отдачи концов. Эта операция выполняется предварительно, перед отдачей концов упомянутого подводного аппарата, или же путем передачи упомянутых положений и упомянутой траектории при помощи радиосигналов второго и третьего типа, которые преобразуются в акустические сигналы и передаются в водную среду при помощи акустического преобразователя упомянутого плавучего аппарата;
используют плавучий аппарат - "распорядитель";
осуществляют передачу с подводного аппарата предпочтительно через равные промежутки времени в подводную среду кодированных акустических сигналов, однозначно характеризующих известное состояние на борту, и акустические сигналы синхронизации, характеризующие время по отношению к источнику общего универсального времени;
определяют на поверхности географические координаты упомянутого подводного аппарата;
передают с поверхности на подводный аппарат корректирующие команды управления по траектории движения.
В предпочтительном варианте реализации способ в соответствии с данным изобретением содержит операции:
с надводного корабля или с подводной лодки спускают на воду или отцепляют упомянутый автономный необитаемый подводный аппарат в некоторой исходной точке, располагающейся в первой морской зоне на расстоянии от упомянутой точки расположения цели в диапазоне, например, от 500 м до 500 км, а в предпочтительном варианте - на расстоянии от этой цели в диапазоне от 10 до 200 км или от 50 до 150 км;
после прибытия упомянутого автономного подводного аппарата во вторую морскую зону, отделенную от упомянутой первой морской зоны линией раздела, располагающейся в предпочтительном варианте на расстоянии менее 10 км от упомянутой цели, например, на расстоянии от нее в диапазоне от 1 до 10 км, по команде от программы, зарегистрированной в запоминающем устройстве бортового вычислителя упомянутого автономного подводного аппарата, производится отцепка или сброс по меньшей мере одного плавучего аппарата, перед этим пришвартованного к упомянутому автономному подводному аппарату или находившегося внутри этого аппарата, при помощи автоматического срабатывания упомянутых средств освобождения этого плавучего аппарата. Освобожденный таким образом плавучий аппарат поднимается на поверхность воды вблизи упомянутой цели и позволяет точно определить местоположение упомянутого автономного подводного аппарата в данный момент благодаря упомянутому первому навигационному спутнику или спутнику определения местоположения, а также позволяет обеспечить ретрансляцию двухсторонних сообщений между упомянутым автономным подводным аппаратом и наземной станцией контроля при помощи упомянутого второго спутника передачи сообщений или связного спутника;
после того, как разведывательная задача данного автономного подводного аппарата будет выполнена, этот подводный аппарат направляется в зону встречи, в предпочтительном варианте располагающуюся в упомянутой первой морской зоне, где были сброшены или дрейфуют, или плавают по меньшей мере один, а предпочтительно два плавучих аппарата, которые позволяют точно определить местоположение упомянутого подводного аппарата в точке встречи, где этот автономный подводный аппарат подбирается упомянутым надводным кораблем или упомянутой подводной лодкой.
В предпочтительном варианте упомянутый автономный подводный аппарат определяет свое положение благодаря одному плавучему аппарату, используя следующие операции:
автономный подводный аппарат в некоторый заданный момент времени сбрасывает или освобождает плавучий аппарат-"распорядитель", в запоминающее устройство вычислителя которого предварительно и дистанционно были загружены теоретические координаты точки сброса, а также данные о скорости, курсе и глубине погружения данного автономного подводного аппарата;
подводный аппарат излучает в моменты времени Т1 и Т2 сигналы синхронизации;
плавучий аппарат-"распорядитель" отмечает моменты времени, в которые на поверхность воды приходят упомянутые сигналы, излученные подводным аппаратом в моменты Т1 и Т2, и вычисляет на основании полученных результатов дистанции D1 и D2 до данного подводного аппарата;
путем расчета в вычислителе плавучего аппарата на основе вычисленных дистанций d1, d2, а также модуля L и ориентации C перемещения, определяются координаты двух точек A1 и B1, соответствующих возможному положению данного подводного аппарата;
упомянутый плавучий аппарат определяет, какая из двух упомянутых выше точек A1 и B1 соответствует реальному положению, в зависимости от данных, относящихся к известному предыдущему положению в упомянутый момент времени t1;
плавучий аппарат передает по акустическому каналу связи под воду данные для коррекции навигационной системы счисления пути на борту данного подводного аппарата или новые инструкции управления.
В предпочтительной варианте по способу в соответствии с данным изобретением упомянутый автономный подводный аппарат определяет свое положение, используя следующие операции:
подводный аппарат определяет при помощи имеющегося у него на борту оборудования свою глубину погружения, свое приблизительное положение, модуль L и ориентацию или курс C вектора, соответствующего его будущему перемещению между упомянутыми моментами времени t1 и t2, причем вся эта информация заносится в запоминающее устройство вычислителя плавучего аппарата;
плавучий аппарат определяется в момент времени t1, а затем соответственно в момент времени t2, дистанции соответственно d1 и d2, отделяющие этот плавучий аппарат от подводного аппарата, благодаря упомянутым акустическим сигналам, излучаемым упомянутым подводным аппаратом;
вычислитель плавучего аппарата определяет на основе полученных таким образом дистанций d1, d2, значений упомянутого модуля L и ориентации или направления C перемещения подводного аппарата координаты двух точек A1, B1, соответствующих возможному положению данного подводного аппарата;
плавучий аппарат определяет, какая из упомянутых двух точек A1, B1 соответствует реальному положению данного подводного аппарата, в функции данных, предварительно размещенных в запоминающем устройстве вычислителя этого плавучего аппарата;
плавучий аппарат передает на упомянутый подводный аппарат данные по коррекции положения.
Благодаря данному изобретению обеспечивается возможность передачи информации на очень большие расстояния при помощи наземной или плавучей морской станции контроля на борт одного или нескольких автономных необитаемых подводных аппаратов для того, чтобы эти аппараты перемещались до зоны или точки расположения цели, в которой эти подводные автономные аппараты имеют возможность идентифицировать и локализовать с весьма высокой точностью те или иные физические явления или наблюдаемые объекты. Данное изобретение позволяет также рассматриваемому автономному подводному аппарату сообщать о выполнении своей разведывательной задачи в оперативный центр, располагающийся на очень большом расстоянии, непосредственно по ходу ее выполнения, а также принимать решения о тех или иных предпринимаемых действиях в зависимости от команд, поступающих на борт этого подводного аппарата, дистанционно сообщать об успешном выполнении задач или выдавать подтверждения о получении команд.
В предпочтительном способе реализации системы в соответствии с предлагаемым изобретением она имеет в своем составе один или несколько автономных необитаемых подводных аппаратов, несколько искусственных спутников Земли, вращающихся по эллиптическим или геостационарным орбитам, по меньшей мере одну расположенную отдельно или плавающую станцию контроля и управления и по меньшей мере один, а в предпочтительном варианте реализации несколько плавучих аппаратов типа буев, надводных кораблей, свободных автономных поверхностных или подводных аппаратов различных типов.
Каждый из упомянутых выше автономных разведывательных подводных аппаратов может быть, например, выполнен в виде торпеды, оборудованной электрическим двигателем, который позволяет этому аппарату перемещаться со скоростью от пяти до десяти узлов и иметь автономность хода от пяти часов до нескольких суток. Каждый из упомянутых автономных подводных аппаратов оборудован по меньшей мере термостабилизированным хронометром, акустическим приемопередатчиком и вычислительным устройством.
В зависимости от выполняемой данным автономным подводным аппаратом задачи и от используемых способов навигации, на его борту могут дополнительно располагаться гирокомпас, доплеровский лаг, датчик глубины погружения, гидролокатор переднего обзора, предназначенный для выявления для выявления подводных препятствий, альтиметр, а также различное измерительное и регистрирующее оборудование для получения и хранения разведывательной информации, например, видеокамера, гидролокатор бокового обзора, эхолот, аппаратура прослушивания и т.д. В процессе выполнения задачи наблюдения упомянутый автономный подводный аппарат имеет возможность получения данных о своем местоположении, то есть своих географических координат (широты и долготы), с точностью, которая меняется в зависимости от различных этапов выполнения задачи. Эта точность определения собственных координат может достигать порядка 300 м при предварительном наведении в место расположения цели или в зону встречи и повышается до 5 - 25 м на этапе окончательного сближения и позиционирования в точке наблюдения или в точке встречи.
В то же время упомянутый автономный подводный аппарат в любой момент времени может принимать команды, предназначенные для воздействия на ход выполнения конкретной задачи и сообщать на станцию контроля и управления данные о своем состоянии, своем положении и об информации, которую данный аппарат принял.
Такой автономный подводный аппарат в предпочтительном варианте реализации оборудуется средствами приема цифровых кодированных сообщений по акустическому каналу, передаваемых одним из плавающих на поверхности воды аппаратов. Эти сообщения могут содержать информацию различного характера, например:
команды, имеющие отношение к выполняемой данным подводным аппаратом задаче,
указания об используемом способе навигации или управления,
запросы об информации, относящейся к состоянию данного автономного подводного аппарата и/или к ходу выполняемой данным аппаратом разведывательной задачи.
В предпочтительном варианте реализации данный автономный подводный аппарат оснащен средствами приема акустических сигналов, излучаемых с поверхности моря упомянутыми плавучими аппаратами в предварительно определенные моменты времени и, предпочтительно, синхронизированных по отношению к универсальному времени.
Автономный подводный аппарат оснащен также средствами передачи акустических сигналов, закодированных при помощи частотно-временной модуляции несущей. Эти сигналы несут информацию о текущем состоянии данного подводного аппарата. Данный подводный аппарат оснащен также средствами передачи в точно определенные моменты времени предпочтительно синхронизированных по отношению к универсальному времени акустических сигналов.
Функционирование данного автономного подводного аппарата может осуществляться под контролем бортового вычислителя, обеспечивающего, в частности, выполнение следующих функций:
анализ принятых акустических сигналов: декодирование кадров, генерирование команды на передачу квитанции (подтверждение приема) сигнала, передача в бортовой компьютер принятой инструкции;
отправка информации о собственном состоянии подводного аппарата по акустическому каналу после получения запроса от внешних источников и получения соответствующей информации от бортового компьютера;
изменение режимов управления подводным аппаратом;
управление траекторией движения подводного аппарата путем передачи в бортовой компьютер инструкций по скорости, курсу, глубине погружения и угловому положению;
принятие решения в случае возникновения инцидентов;
выполнение процедуры сброса или отцепки буев.
Совокупность средств космической связи основывается на системе перемещающихся или геостационарных спутников, обеспечивающих выполнение трех основных функций:
разведка: использование вращающихся по эллиптическим орбитам спутников слежения, имеющих на борту оптические, радиолокационные, инфракрасные и другие датчики (например, спутники Гелиос);
определение местоположения: типовая функция спутников навигационных спутниковых систем GPS или GLOSNASS, которые позволяют определить местоположение подвижных объектов на всей земной поверхности с весьма высокой точностью и с частотой повторяемости порядка одной секунды путем приема специальных кодированных сигналов, излучаемых системой из 22 спутников на соответствующих эллиптических орбитах, обеспечивающих полное перекрытие во времени и пространстве всего земного шара;
передача сообщений: использование системы специальных перемещающихся или геостационарных спутников, обеспечивающей информационную связь между наземной станцией контроля и управления и плавающими на поверхности аппаратами в квазиреальном времени.
В этом состоит одна из функций системы геостационарных спутников ИНМАРСАТ, обеспечивающих передачу сообщений в стандарте "C".
Наземные средства контроля и управления содержит четыре основных подсистемы:
наземную инфраструктуру связи с упомянутыми спутниками, а именно: наземные станции навигационной системы GPS, наземные станции ИНМАРСАТ, наземные станции приема и обработки сигналов разведывательных спутников и спутников наблюдения;
одну или несколько станций дифференциальных измерений в системе GPS, функция которых состоит в повышении точности позиционирования плавающих на поверхности моря подвижных аппаратов при помощи наземных измерений в системе GPS;
наземные системы передачи данных, такие как сеть телефонной связи (RTC), система Transpac, система Numeris, системы связи военного назначения;
оперативный центр контроля и управления, который имеет в своем составе пункты доступа к цифровым сетям, вычислительные средства, один или несколько постов операторов, средства отображения информации (картографические средства, средства прокладки траекторий движения, воспроизведение изображений и т.д.).
В некоторых случаях из оперативных соображений упомянутые выше средства контроля и управления могут быть расположены на подводном корабле или на самолете, перемещающемся в непосредственной близости от района осуществляемых в данном случае действий. В случае необходимости упомянутые морские или воздушные объекты могут быть беспилотными.
Средства ретрансляции сигналов связи и информационных сообщений, относящихся к определению местоположения, располагаются на одном или нескольких плавучих аппаратах, в качестве которых могут использоваться радиобуи, сбрасываемые с самолета, с надводного корабля или с подводной лодки, сами надводные корабли или автономные аппараты, свободно плавающие на поверхности моря или непосредственно под этой поверхностью.
Упомянутые выше плавучие аппараты в системе дистанционного контроля и управления в соответствии с изобретением могут быть двух типов:
плавучий аппарат-"распорядитель" содержит по меньшей мере один приемопередатчик связи по стандарту "C", приемник сигналов спутниковой навигационной системы GPS, термостабилизированный хронометр, приемопередатчик акустических сигналов, специализированный процессор вычислений и обмена данными, приемопередатчик радиосигналов (как вариант реализации);
элементарный плавучий аппарат содержит приемник сигналов спутниковой навигационной системы GPS, связной приемопередатчик, работающий в стандарте "C", специализированный процессор вычислений и обмена данными, радиопередатчик (как вариант реализации).
Упомянутый выше плавучий и находящийся на поверхности моря аппарат-"распорядитель" обеспечивает выполнение следующих функций:
прием в своем собственном пространственном положении сигналов спутниковой навигационной системы GPS и расчет, в случае необходимости, своего отклонения по курсу и по скорости, а также своего углового положения;
прием информационных сообщений в стандарте "C" или других радиосигналов, несущих информацию о командах, предназначенных для данного автономного подводного аппарата, дифференциальной коррекции сигналов навигационной системы GPS, координатах соседних плавучих аппаратов подобного типа и временных отметках принятых акустических сигналов, запросов состояния плавучести, запросов состояния данного подводного автономного аппарата;
прием по акустическим каналам информационных кадров, соответствующих текущим состояниям данного подводного аппарата;
определение в реальном универсальном времени моментов выявления акустических сигналов, излученных синхронным образом с борта данного автономного подводного аппарата;
передача в стандарте "C" информационных сообщений типа: состояние буев или плавучих аппаратов, состояние автономного подводного аппарата, определение моментов времени;
локальный расчет в случае необходимости положения данного подводного аппарата при помощи метода определения псевдодистанций и соответствующие сигналы коррекции;
акустическое излучение: ретрансляция командных сигналов на данный подводный аппарат, передача сигналов запроса, передача синхронных сигналов.
Функции элементарного плавучего основания (плавучего аппарата) состоят в излучении сигналов в стандарте "C" или радиосигналов, несущих информацию о положении данного буя и отметках времени приема акустических сигналов.
Возможности передачи цифровых данных через систему ИНМАРСАТ в квазиреальном времени используются для передачи на радиобуи корректирующих сигналов положения в системе GPS (дифференциальный режим навигации).
На борту данного буя наилучшее счисление его пространственного положения по широте и долготе рассчитывается с помощью корректирующих сигналов от навигационной системы GPS, выдаваемых в бортовую навигационную систему от бортового приемника.
Используемый канал передачи представляет собой акустический канал, использующий акустический преобразователь, погруженный в воду на оптимальную глубину с учетом местных условий.
Данный акустический преобразователь излучает в воду акустические сигналы, сформированные и информационного кадра. Этот акустический преобразователь имеет следующие основные характеристики:
всенаправленное излучение акустических сигналов;
излучение предпочтительно в узкой частотной полосе или в широкополосном спектре частот;
циклы передачи, синхронизированные по универсальному времени;
повторяемость передачи информационных кадров, фиксированных или в соответствии с псевдослучайными циклами (изменение во времени);
мультиспектральное кодирование и пространственно-временная избыточность;
кодирование, позволяющее на приемной стороне рассчитать показатель достоверности (коэффициент качества передачи).
Система и способ в соответствии с предлагаемым изобретением могут оказаться весьма полезными для коррекции навигационных устройств подводной лодки в погруженном состоянии.
Многочисленные преимущества, предоставляемые данным изобретением, будут лучше поняты из приведенного ниже подробного описания со ссылками на чертежи, на которых без каких-либо ограничений проиллюстрирован предпочтительный способ практической реализации системы в соответствии с данным изобретением и способ использования упомянутой системы.
На фиг. 1 схематически представлены основные компоненты системы дистанционного контроля и управления подводным аппаратом в соответствии с данным изобретением и принцип ее функционирования.
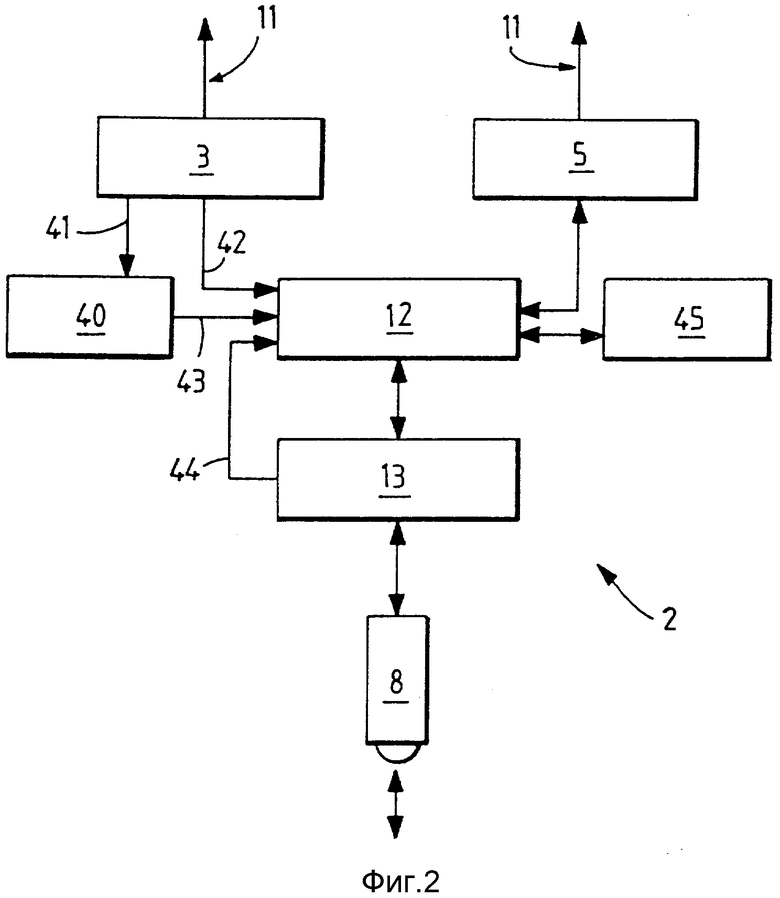
На фиг. 2 схематически показаны основные компоненты плавучего аппарата, являющегося основной частью системы в соответствии с данным изобретением.
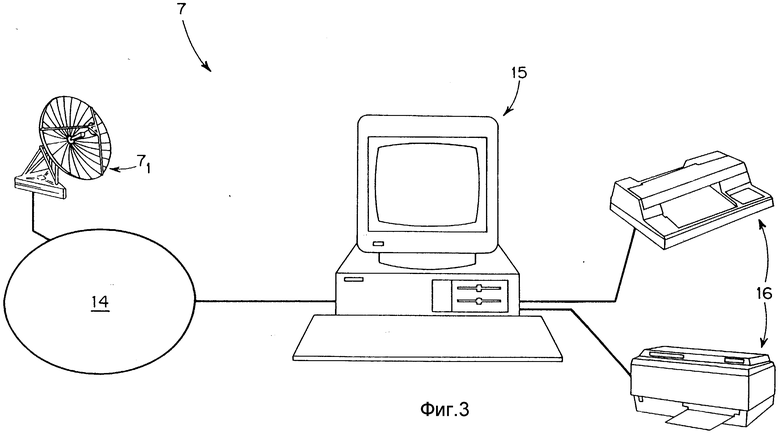
На фиг. 3 схематически показаны основные компоненты наземной станции контроля, являющейся составной частью системы в соответствии с данным изобретением.
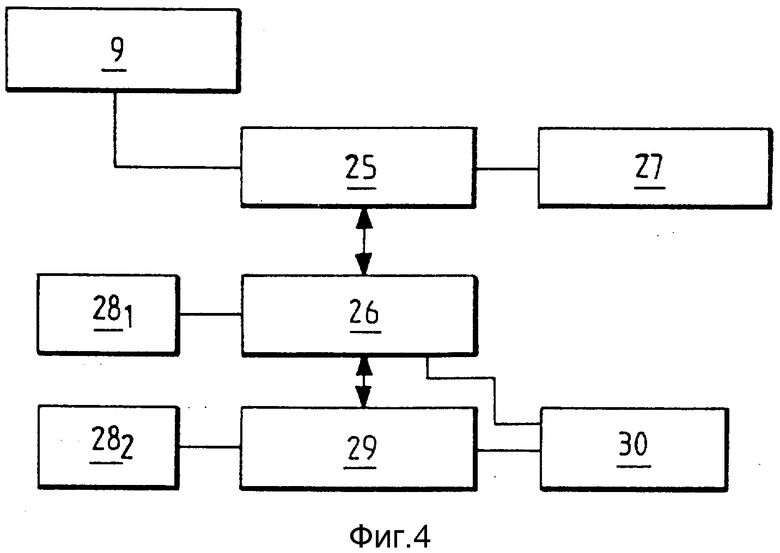
На фиг. 4 схематически представлены основные компоненты установленных на автономном подводном аппарате средств связи, контроля и управления, являющихся составной частью системы в соответствии с данным изобретением.
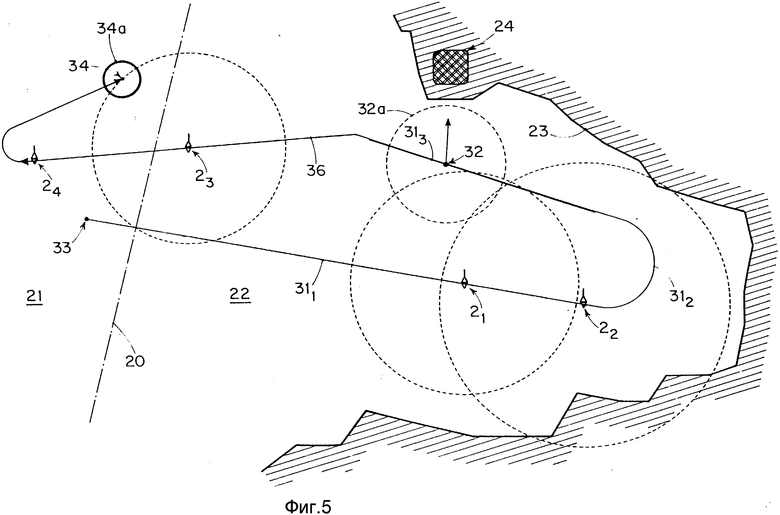
На фиг. 5 схематически представлены различные этапы способа использования системы в соответствии с предлагаемым изобретением для реализации разведывательной задачи при помощи автономного подводного аппарата.
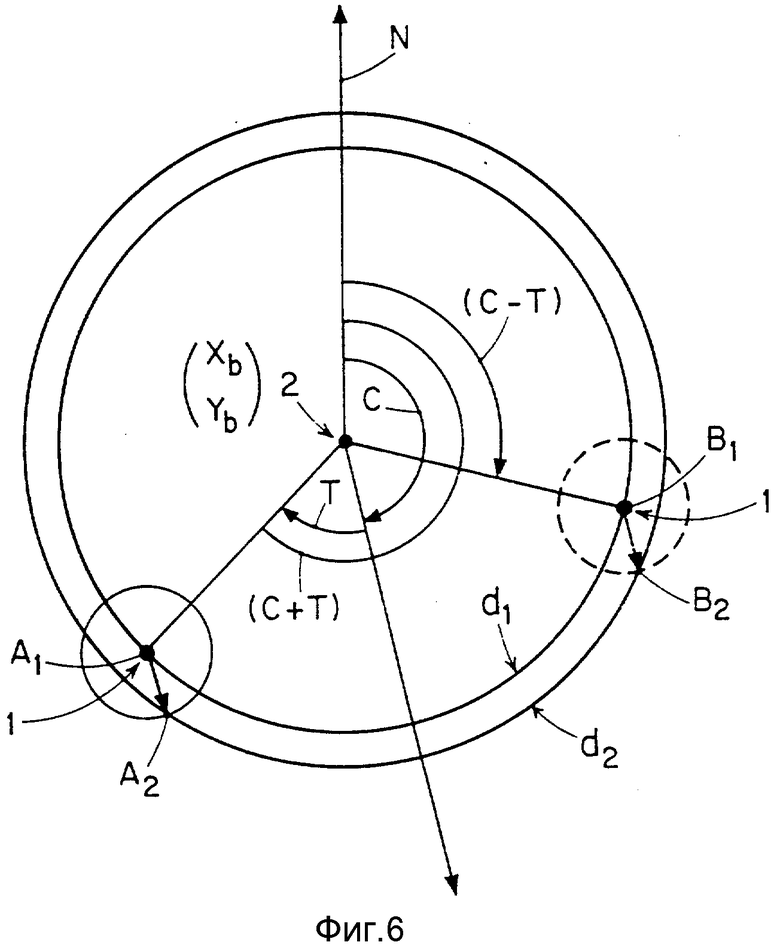
На фиг. 6 схематически представлены этапы способа определения местоположения или позиционирования подводного аппарата, использующего сигналы, передаваемые только одним плавучим аппаратом системы в соответствии с данным изобретением.
На фиг. 1 частично схематически показан автономный подводный аппарат 1, оборудованный двигателем и рулем управления 10. Корпус этого подводного аппарата в целом может иметь форму торпеды. Данный подводный аппарат содержит по меньшей мере один акустический преобразователь 9, который позволяет ему устанавливать двухстороннюю связь, т. е. передавать и принимать сигналы, соответственно принимаемые и передаваемые плавучими аппаратами, например, буями 21, 22, 23.
В предпочтительном варианте реализации упомянутый автономный подводный аппарат содержит специальный отсек или средство хранения 19, расположенное внутри корпуса 18. Это пространство для хранения 19 может сообщаться с внешней средой посредством люка 17, который может быть открытым или закрытым и зависимости от тех или иных команд, принимаемых данным автономным подводным аппаратом 1. Такая конструкция позволяет в функции принятых команд и выполняемой данным автономным подводным аппаратом задачи освобождать или сбрасывать плавучий аппарат 24, предварительно размещенный в упомянутом отсеке хранения 19. Таким образом, этот плавучий аппарат может быть отцеплен или выведен из подводного аппарата 1, после чего поднимается на поверхность воды и начинает выполнять свои функции ретранслятора сообщений между упомянутым автономным подводным аппаратом и спутником, в частности, в том случае, когда этот подводный аппарат приближается к некоторой точке или к некоторому географическому местоположению, соответствующим цели, выполняемой в данном случае задачи.
Каждый из буев 21, 22, 23 содержит поплавок 35, в верхней части которого установлена антенна 11. Эта антенна позволяет бую принимать и/или передавать радиосигналы. Каждый такой буй или плавучий аппарат содержит также соответственно акустический преобразователь или приемопередатчик акустических сигналов, обозначенный позициями 81, 82, 83.
Каждый из плавучих аппаратов или буев имеет возможность, с одной стороны, принимать радиосигналы, передаваемые спутниками 4 навигационной системы определения местоположения. Благодаря этим сигналам специальный бортовой вычислитель на каждом из этих буев имеет возможность достаточно точно определить местоположение буя предпочтительно через равные промежутки времени.
С другой стороны, каждый из этих буев имеет возможность принимать и передавать радиосигналы второго типа, посылаемые или принимаемые с второго спутника 6 передачи сообщений. Этот позволяет при помощи радиосигналов второго типа обеспечить передачу команд (то есть информации командного типа), относящихся к данной задаче и предназначенных для автономного подводного аппарата, или, в другом направлении, информацию, относящуюся к координатам данного буя, к отметкам времени поступления акустических сигналов и к состоянию данного подводного аппарата. Эта информация может быть, таким образом, при помощи второго спутника 6 передана на наземную станцию контроля и управления 7.
На фиг. 3 схематически показана предпочтительная структура станции контроля и управления 7, которая может включать приемопередатчик 71 двусторонней связи при помощи радиосигналов третьего типа со спутником передачи сообщений 6 (фиг. 1). Наземная станция, которая может быть связана с приемопередатчиком 71 при помощи наземной сети связи 14 типа обычной телефонной сети или компьютерной сети, позволяет центральному вычислителю управления работать в диалоговом режиме с автономным подводным аппаратом. В предпочтительном варианте реализации этот центральный вычислитель связан с периферийными устройствами 16 типа графопостроителей или принтеров, позволяющих графически оформлять и распечатывать донесения, касающиеся состояния или установленных связей, то передачи и приемов, данного подводного аппарата.
На фиг. 2 схематически показана структура плавучего аппарата, в которую может входить по меньшей мере одна антенна 11, предназначенная для приема радиосигналов, которые затем детектируются, усиливаются и обрабатываются приемником 3 радиосигналов определения местоположения, передаваемых навигационными спутниками. Хронометр 40 синхронизируется по линии 41. Выявление при помощи акустического процессора 13 факта поступления акустического сигнала вызывает считывание вычислителем 12 посредством линии 42 положения данного буя и вызывает считывание упомянутым вычислителем по линии 43 точной временной отметки этого момента поступления акустического сигнала и по линии 44 принятого импульса.
Из фиг. 4 видно, что автономный подводный аппарат 1, имеющий в своем составе акустический преобразователь 9, содержит в предпочтительном варианте реализации акустический процессор 25 обработки сигналов, предназначенных для этого преобразователя 9, или принятых данным акустическим преобразователем 9, причем упомянутые сигналы могут быть снабжены отметками времени при помощи кварцевого хронометра 27 высокой точности. Бортовой вычислитель 29 связан с процессором решения поставленной задачи 26 и интерпретирует принятые команды и команды управления, а также осуществляет управление датчиками и приводами данного подводного аппарата в соответствии с предварительно запрограммированными способами навигации. Комплекс оборудования данного автономного подводного аппарата может получать электропитание от аккумуляторных батарей 30. В предпочтительном варианте реализации каждый из упомянутых выше процессоров 26 и 29 связан по меньшей мере с одним запоминающим устройством соответственно 281 и 282, в которых хранятся, в частности, данные, относящиеся к упомянутым способам или алгоритмы навигации и инструкции относительно следования по заданной траектории.
На схеме, приведенной на фиг. 5, показано, что в конкретном варианте применения системы, реализующей способ в соответствии с изобретением, можно отцеплять или сбрасывать автономный подводный аппарат (на схеме не показан) в некоторой произвольной исходной точке 33, располагающейся в некоторой морской зоне 21, которая может соответствовать, например, зоне нейтральных или международных вод. Эта зона моря отделена от второй морской зоны 22, соответствующей, например, зоне территориальных вод того или иного государства, некоторой разделительной или демаркационной линией 20.
В соответствии с конкретным вариантом реализации конкретной разведывательной задачи, осуществляемой автономным подводным аппаратом, этот аппарат прежде всего перемещается под водой из исходной точки 33 к зоне расположения цели 32а, следуя по предварительно заданной и заранее записанной в запоминающем устройстве вычислителя данного автономного подводного аппарата траектории. В показанном на фиг. 5 случае эта предварительно заданная траектория содержит начальный прямолинейный участок 311 и последующий криволинейный участок в виде дуги окружности с радиусом некоторой величины 312. В предпочтительном варианте реализации перед прибытием данного автономного подводного аппарата в зону цели 32а этот автономный подводный аппарат может сбросить два упомянутых выше плавучих аппарата: один плавучий аппарат 21, называемый "распорядителем", и один плавучий аппарат 22, называемый "элементарным". Эти плавучие аппараты после поднятия их на поверхность воды или всплытия обеспечивают возможность для данного автономного подводного аппарата принимать высокоточные команды управления движением внутри упомянутой зоны цели 32а, в частности в непосредственной близости от точки расположения цели 32. Далее данный автономный подводный аппарат следует по предварительно определенной траектории 313. В процессе движения по этому участку заданной траектории подводный аппарат может, например, всплыть на поверхность, ввести коррекцию в свою навигационную систему счисления пути при помощи приемника сигналов спутниковой навигационной системы GPS, устанавливаемого на этом автономном подводном аппарате по специальному требованию, и осуществить оптическую съемку доступной для визуального наблюдения цели 24, располагающейся на расстоянии прямой видимости в береговой зоне 23.
После того, как автономный подводный аппарат завершит выполнение своей разведывательной задачи и передаст в центр управления и контроля собранную им информацию посредством радиопередающих средств, использующих упомянутые выше связные спутники, он может направиться в зону встречи 34а, следуя по траектории возвращения 36. В упомянутой точке встречи данный автономный подводный аппарат имеет возможность весьма точно определить свое местоположение в зоне 34а этой встречи, используя возможности двух других сбрасываемых плавучих аппаратов 23 и 24.
На фиг. 6 в соответствии с предпочтительным вариантом практической реализации способа по данному изобретению схематически показано, как данный автономный подводный аппарат 1 может осуществить определение своего местоположения на основе сигналов, принимаемых и передаваемых только одним упомянутым выше плавучим аппаратом типа "распорядитель" 2.
Вычислительные средства, установленные на плавучем аппарате 2, определяют координаты xb и xy, соответствующие его текущему пространственному положению, при помощи упомянутых выше радиосигналов, которые этот плавучий аппарат принимает от спутниковой навигационной системы.
Исходя из временных отметок упомянутых выше акустических сигналов, принятых плавучим аппаратом от автономного подводного аппарата 1, вычислительные средства плавучего аппарата 2 определяют дистанцию d1, отделяющую плавучий аппарат от подводного аппарата 1 в момент времени t1, и определяют аналогичным образом дистанцию d2, отделяющую плавучий аппарат от подводного аппарата в последующий момент времени t2.
В момент сброса плавучего аппарата 2 его вычислительные средства имеют информацию об известном на основании счисления пути положения автономного подводного аппарата, а также информацию о модуле L и направлении или курсе C вектора перемещения этого аппарата в соответствии с заранее заложенной программой и глубиной его погружения в промежутке между моментами времени t1 и t2. Пространственное положение подводного аппарата 1 в момент времени t1, как это показано на фиг 6, может соответствовать одной из двух точек A1 и B1, располагающихся на окружности диаметром d1 с центром в точке расположения плавучего аппарата 2, или одной из двух точек A2 и B2 соответственно в момент времени t2, которые располагаются на окружности диаметром d2 с центром все в той же точке расположения плавучего аппарата 2.
Позиция C, обозначающая курс движения автономного подводного аппарата по отношению к направлению на север, обозначенному позицией N, определяет курсовой угол или азимут упомянутых точек A1 и B1, который, как это показано на фиг. 6, может быть определен исходя из известного угла курса C как определяемый выражениями (C + T) или (C - T).
Определение упомянутого выше угла T сможет быть выполнено в соответствии со следующим выражением:
cos(T) = (d
Теперь координаты упомянутых выше точек A1 и B1 могут быть соответственно определены при помощи следующих выражений:
- XA1 = Xb + d1•sin (C + T) + L•Sin(C);
- YA1 = Yb + d1 • cos(C + T) + L • cos(C);
- XB1 = Yb + d1 • sin(C - T) + L • sin(C);
- YB1 = Yb + d1 • cos(C - T) + L • cos(C).
Поскольку пространственное положение автономного подводного аппарата неизвестно в момент времени t1, фактически существуют только два возможных его положения, соответствующих приведенной выше системе уравнений, что соответствует графическому решению данной задачи, состоящему в позиционировании начала вектора перемещения подводного аппарата на окружности диаметром d1 и конца этого вектора перемещения на окружности, также центрированной в текущем положении плавучего аппарата и имеющей диаметр d2. Неопределенность в определении действительного положения автономного подводного аппарата (в точке A1 или в точке B1) разрешается с учетом априорного знания положения этого подводного аппарата благодаря информации, относящейся к его определенному ранее положению.
Поскольку эти положения теперь являются известными, плавучий аппарат или буй осуществляет передачу на автономный подводный аппарат свои новые директивные указания относительно алгоритмов дальнейшего управления движением.
В некоторых специальных случаях применения способа в соответствии с изобретением упомянутые выше аппараты, называемые плавучими, могут быть расположены под или на припайном или паковом льду (и/или вморожены в этот лед).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИМЕНЕНИЯ НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА ПОДО ЛЬДОМ | 2020 |
|
RU2757006C1 |
| Устройство радиомониторинга морских и воздушных объектов с применением привязного беспилотного летательного аппарата мультикоптерной схемы с электропитанием по тросу-кабелю | 2023 |
|
RU2813105C1 |
| КОНТРОЛИРУЕМЫЙ МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК | 2021 |
|
RU2766365C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| Гидроакустический комплекс позиционирования и связи для навигационно-информационного обеспечения автономных необитаемых подводных аппаратов | 2023 |
|
RU2812089C1 |
| АКУСТИЧЕСКИЙ РЕФЛЕКТОР МОБИЛЬНЫЙ | 2020 |
|
RU2755751C1 |
| МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2709058C2 |
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| Способ навигационного оборудования морского района | 2022 |
|
RU2789999C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2010 |
|
RU2449917C1 |
Изобретение относится к способу и системе дистанционного контроля и управления подвижным необитаемым частично автономным подводным аппаратом. Система содержит по меньшей мере один необитаемый плавучий аппарат, свободно дрейфующий и/или автономный, и содержащий по меньшей мере один первый приемник односторонней связи по меньшей мере с одним первым передатчиком первых радиосигналов определения местоположения и по меньшей мере один приемопередатчик двусторонней связи по меньшей мере с одним вторым приемопередатчиком вторых радиосигналов передачи сообщений, располагающимся на земле и обеспечивающим двустороннюю связь с вторым приемопередатчиком вторых радиосигналов передачи сообщений, а также по меньшей мере один приемопередатчик информационных сигналов и сигналов синхронизации, причем автономный подводный аппарат содержит по меньшей мере один приемопередатчик информационных сигналов и сигналов синхронизации, совместимых с приемопередатчиком плавучего аппарата. Данное изобретение может быть использовано в системах определения пространственного местоположения и акустических системах управления подводными аппаратами. Технический результат заключается в возможности наблюдения и дистанционного контроля и координации одного или нескольких необитаемых подводных аппаратов. 2 с. и 8 з.п. ф-лы, 6 ил.
| EP, патент, 0518146, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| FR, патент, 2643463, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент, 5119341, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
