Изобретение относится к релейной защите и предназначено для защиты асинхронного двигателя от витковых замыканий в обмотке статора.
Известен способ, применяемый в устройствах защиты двигателей от витковых замыканий, использующий оценку превышения фазными токами статора предельно допустимых значений. На его основе создаются токовые отсечки и максимальные токовые защиты (МТЗ) [1]. Однако такие защиты обладают недостаточной селективностью, чувствительностью и быстродействием, так как значения тока двигателя в нормальном пусковом режиме мало отличаются от тока двигателя при замыкании небольшого числа витков. Поэтому такие защиты позволяют обнаружить замыкания только значительного количества витков обмотки с большой выдержкой времени срабатывания.
Наиболее близким по технической сущности к предложенному методу является метод, в соответствии с которым определяют полное сопротивление контролируемого электродвигателя по интегральным значениям тока и напряжения и сравнивают это сопротивление с уставкой [2].
Недостатком известного способа является низкая селективность. Это обусловлено тем, что в переходных режимах трудно определить достоверное значение полного сопротивления контролируемого электродвигателя, так как токи и напряжения имеют несинусоидальную форму и содержат апериодические составляющие. В этих условиях для достоверного определения интегральных значений тока и напряжения требуется длительное наблюдение за процессами, что приводит к снижению быстродействия защиты.
Цель изобретения - повышение селективности и быстродействия способа.
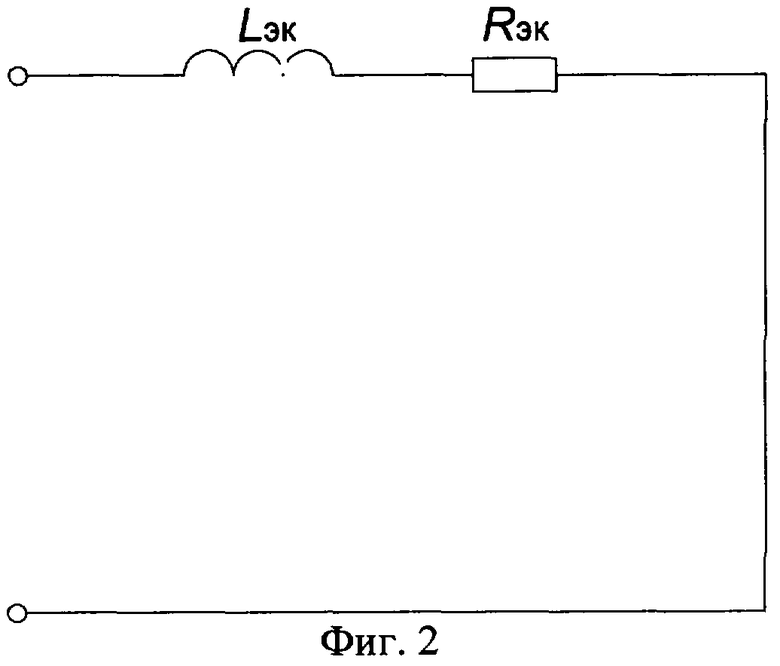
Поставленная цель достигается тем, что измеряют мгновенные значения токов и напряжений на зажимах двигателя, преобразуют их в напряжение, пропорциональное току, и в напряжение, пропорциональное напряжению, осуществляют регистрацию полученных сигналов, кроме того, с помощью датчика скорости осуществляют измерение скольжения двигателя. Определяют мгновенные значения токов, напряжений и фазу возникновения переходного процесса. Вычисляют последующие мгновенные значения тока при исходных значениях эквивалентного активного сопротивления и эквивалентной индуктивности электродвигателя. Вычисленные мгновенные значения тока сравнивают с соответствующими зарегистрированными значениями, определяют их разность и, в зависимости от ее величины, изменяют значения эквивалентного активного сопротивления и эквивалентной индуктивности электродвигателя, причем если полученная разность имеет положительное значение, то значения эквивалентного активного сопротивления и эквивалентной индуктивности увеличивают, а при отрицательной разности уменьшают. Коррекция параметров происходит до достижения разностью между вычисленными и зарегистрированными значениями тока установленного предельного минимального значения. Полученные параметры, при измеренном значении скольжения, сравнивают с уставками, и если значения эквивалентного активного сопротивления и эквивалентной индуктивности выходят за пределы допустимых, то формируют сигнал на отключение электродвигателя. Анализ процессов производят на основе Т-образной схемы замещения асинхронного двигателя, представленной на фиг.1. Учитывая реальное соотношение параметров электродвигателей, для целей релейной защиты контролируемый электродвигатель можно представить электрической цепью, состоящей из эквивалентного активного сопротивления и эквивалентной индуктивности, изображенной на фиг.2 [3]. При этом ток статора электродвигателя описывается следующим уравнением [4]:

где Im - амплитудное значение тока;
 - фазовый сдвиг;
- фазовый сдвиг;
i(0) - начальное значение тока в момент возникновения виткового замыкания;
R - эквивалентное активное сопротивление асинхронного двигателя;
L - эквивалентная индуктивность асинхронного двигателя;
t - текущее время переходного процесса.
Такой метод расчета позволяет оперировать мгновенными значениями токов и напряжений, то есть производить более точный анализ переходных процессов, а дополнительное измерение скольжения двигателя - отличать нормальные переходные режимы от аварийных.
На фиг.1 и фиг.2 приведены соответственно Т-образная и эквивалентная схемы замещения асинхронного электродвигателя. Обозначениям на схемах соответствуют следующие величины, приведенные к обмотке статора:
R1, L1 - активное сопротивление и индуктивность обмотки статора;
R2, L2 - активное сопротивление и индуктивность обмотки ротора;
Rm, Lm - активное сопротивление и индуктивность цепи намагничивания;
s - скольжение асинхронного двигателя;
RЭК, LЭК - эквивалентное активное сопротивление и эквивалентная индуктивность двигателя.
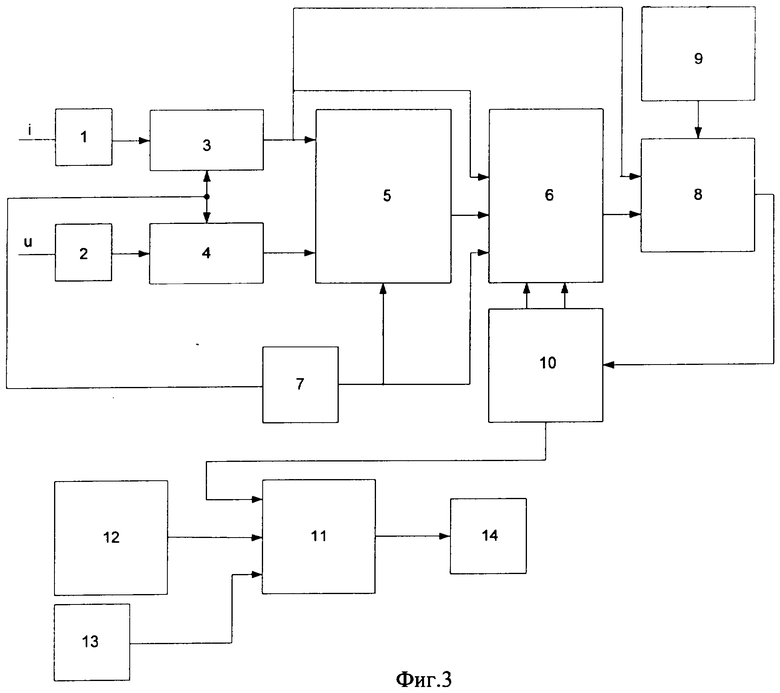
На фиг.3 приведена функциональная схема устройства, реализующего предложенный метод.
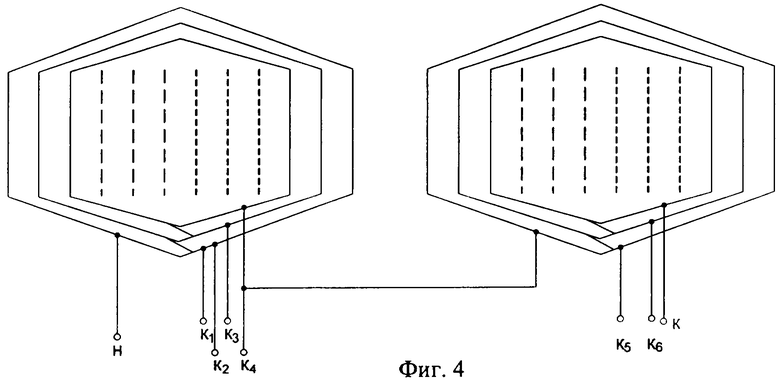
На фиг.4 изображена схема расположения выводов в обмотке электродвигателя для моделирования витковых замыканий.
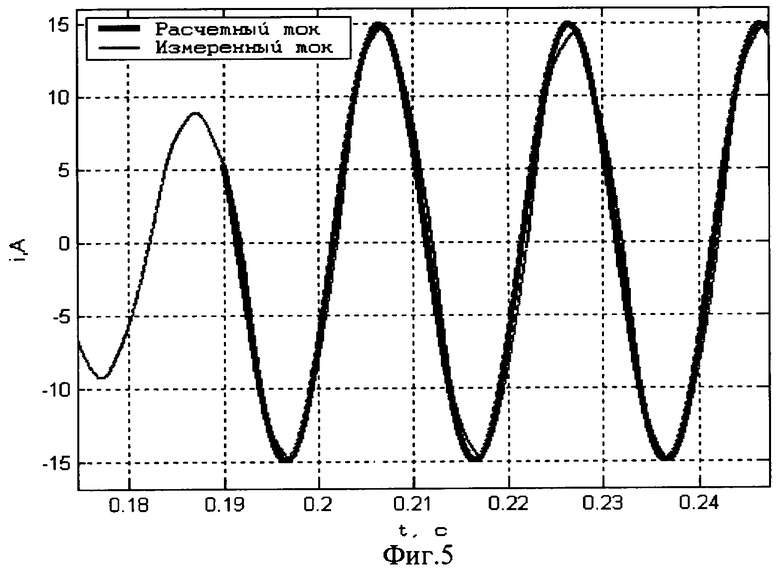
На фиг.5 изображена осциллограмма тока при витковом замыкании под нагрузкой (26 витков при общем числе витков катушки 216) асинхронного двигателя серии АИР. Линией более темного цвета на осциллограмме показан расчетный ток.
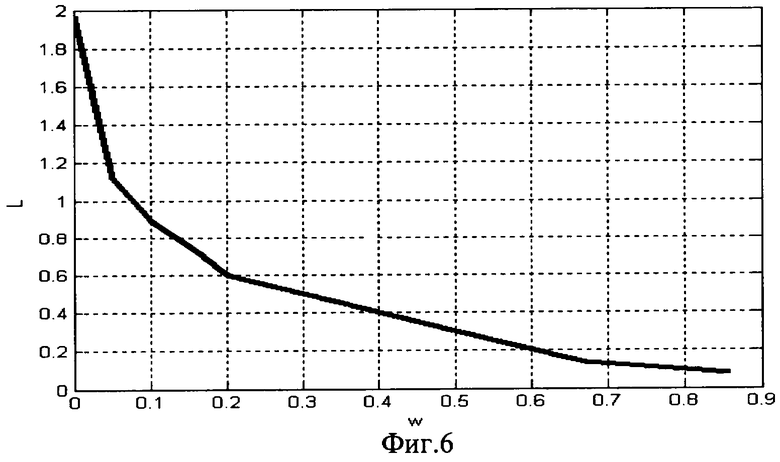
На фиг.6 изображена в относительных единицах кривая изменения индуктивности от числа замкнувшихся витков при витковых замыканиях в асинхронном двигателе. Эта зависимость получена экспериментальным путем для двигателей серии АИР и 4А.
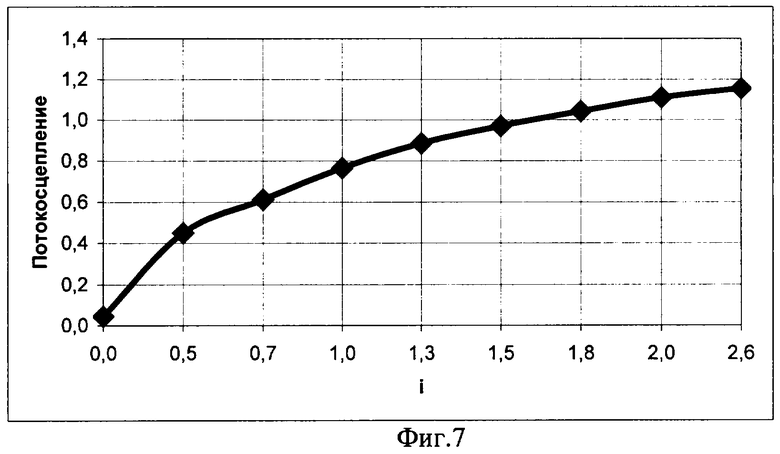
На фиг.7 изображена кривая намагничивания в относительных единицах для двигателя серии АИР.
На фиг.8 изображена зависимость индуктивности двигателя от тока, построенная с использованием кривой намагничивания.
Предложенный метод реализован следующим образом.
Создано устройство защиты, функциональная схема которого приведена на фиг.3. Устройство испытано на электродвигателе серии АИР мощностью 3 кВт. При испытании защитного устройства реализованы различные режимы работы электродвигателя. Проведена проверка работы защиты в нормальных режимах: при пуске, на холостом ходу и под нагрузкой. Для моделирования витковых замыканий в обмотке одной из фаз электродвигателя выполнено 6 отводов. На одну пару полюсов в каждой фазе двигателя приходится одна секция, состоящая из трех катушек с 36 витками.
Координаты отпаек:
K1 - 26 виток первой катушки;
К2 - 36 виток (конец первой катушки);
К3 - 72 виток (конец второй катушки);
К4 - 108 виток (конец третьей катушки);
К5 - 144 виток (конец четвертой катушки);
К6 - 180 виток (конец пятой катушки).
Схема расположения выводов в обмотке электродвигателя для моделирования витковых замыканий представлена на фиг.4. Витковые замыкания моделировались с помощью замыкания отпаек на начало обмотки. Испытания проводились при номинальном фазном напряжении 220 В.
Устройство защиты содержит блок 1 преобразователя тока в напряжение, блок 2 преобразователя напряжения в напряжение, блок 3 регистрации тока и блок 4 регистрации напряжения, блок 5 определения фазы возмущения, блок 6 вычисления мгновенных значений тока, таймер 7, блок 8 сравнения тока, блок 9 задания минимальной разности токов, блок 10 определения эквивалентного активного сопротивления и эквивалентной индуктивности, блок 11 сравнения параметров, блок 12 задания уставок, датчик 13 скорости вращения вала двигателя, асинхронный электродвигатель 14.
Выход блока 1 соединен с входом блока 3, выход блока 2 соединен с входом блока 4. Выход блока 3 соединен с первым входом блока 5, первым входом блока 6 и первым входом блока 8, выход блока 4 соединен со вторым входом блока 5. Выход блока 5 соединен со вторым входом блока 6. Выход блока 6 соединен со вторым входом блока 8. Выходы блока 7 соединены со вторыми входами блоков 3 и 4, а также с третьими входами блоков 5 и 6. Выход блока 8 соединен с входом блока 10. Выход блока 9 соединен с третьим входом блока 8. Первый и второй выходы блока 10 соединены с четвертым и пятым входами блока 6, а третий выход блока 10 соединен с первым входом блока 11. Второй и третий входы блока 11 соединены с выходами блоков 12 и 13, соответственно. Выход блока 11 соединен с входом блока 14.
Устройство работает следующим образом. На входы преобразователя 1 ток-напряжение и преобразователя 2 напряжение-напряжение подаются соответственно ток и напряжение защищаемого объекта. Сигналы с выходов преобразователей регистрируются регистратором тока 3 и регистратором напряжения 4. Сигналы с регистраторов поступают на блок 5 определения фазы возмущения. Выходной сигнал с блока 5 определения фазы возмущения подается на вход блока 6 вычисления мгновенных значений тока, на второй вход которого подается сигнал с регистратора тока 3, задающий начальный ток при возникновении переходного процесса. Кроме того, на входы регистраторов 3 и 4 подается сигнал с таймера 7 для регистрации мгновенных значений тока и напряжения в одни и те же моменты времени. Сигнал с таймера 7, ведущего отсчет текущего времени, подается также на вход блока 5 определения фазы возмущения и на вход блока 6 вычисления мгновенных значений тока. Выходной сигнал с блока 6 вычисления мгновенных значений тока поступает на блок 8 сравнения токов, на второй вход которого поступает измеренный ток с регистратора тока 3, а на третий вход подается сигнал с блока 9 задания минимальной разности токов. С помощью блока 8 осуществляется определение разности между вычисленными мгновенными значениями тока и соответствующими зарегистрированными значениями и сравнение их с минимально допустимой разностью токов. С выхода блока 8 сравнения сигнал подается на блок 10 определения эквивалентного активного сопротивления и эквивалентной индуктивности. Выходные сигналы блока 10 поступают на блок 6 вычисления мгновенных значений токов, где осуществляется при необходимости повторный расчет мгновенных значений токов, а также на блок 11 сравнения параметров. В блоке 11 сравнения параметров осуществляется сравнение полученных значений эквивалентного активного сопротивления и эквивалентной индуктивности с заданными значениями, которые поступают на вход блока 11 сравнения с блока 12 задания уставок. Кроме того, на третий вход блока сравнения подается скольжение двигателя, определяемое с помощью датчика скорости 13. В результате формируется выходной сигнал на отключение асинхронного двигателя.
Для каждого режима с помощью описанного метода построены кривые расчетных токов и определены эквивалентные активное сопротивление и индуктивность. Одна из таких кривых тока при витковом замыкании 26 витков изображена на фиг.5. Для режимов пуска, холостого хода и нагрузочного режима значения полученных параметров подтверждаются с помощью расчетов на основе Т-образной схемы замещения.
Например, для режима нормального пуска с помощью описанного метода получены параметры R=4 Ом, L=0,02 Гн. Те же самые параметры рассчитаны по Т-образной схеме замещения, в которой скольжение двигателя принято равным единице, а ветвь намагничивания не учитывается. В результате получены следующие параметры R=4,23 Ом, L=0,02 Гн.
Для режима холостого хода получены параметры R=9,7 Ом, L=0,2 Гн, а по Т-образной схеме расчетным путем получены близкие значения:
R=9,667 Ом, L=0,182 Гн.
Как видно, разброс параметров, полученных устройством по реальным кривым тока и полученных расчетным путем по Т-образной схеме, не превышает 10%. Реально достижимая точность вполне достаточна для целей релейной защиты.
В результате исследований витковых замыканий на холостом ходу для двигателя серии АИР получены следующие эквивалентные активные сопротивления и эквивалентные индуктивности:
замыкание первой отпайки на начало: R=16 Ом, L=0,1 Гн,
второй отпайки на начало: R=14 Ом, L=0,08 Гн,
третьей отпайки на начало: R=13 Ом, L=0,018 Гн,
четвертой отпайки на начало: R=6 Ом, L=0,008 Гн,
пятой отпайки на начало: R=6 Ом, L=0,0075 Гн,
шестой отпайки на начало: R=4 Ом, L=0,005 Гн.
Кривая изменения индуктивности в относительных единицах изображена на фиг.6. Аналитически кривая изменения индуктивности электродвигателя от числа замкнувшихся витков может быть построена на основе следующих рассуждений.
Если под потокосцеплением контура (ψ) понимать полный магнитный поток, сцепляющийся с этим контуром и обусловленный током в нем, то эквивалентную индуктивность можно выразить следующим образом [5]:

где ψ - потокосцепление, отн.ед.;
i - ток, отн.ед.
Таким образом, с учетом указанного выражения, разделив потокосцепление в кривой намагничивания, изображенной на фиг.7, на ток, будем иметь зависимость индуктивности от тока, представленную на фиг.8.
Отсюда следует, что при увеличении числа замкнувшихся витков ток в поврежденной фазе увеличивается, а индуктивность уменьшается.
Кроме того, следует отметить, что метод обеспечивает высокую чувствительность защиты при малом количестве замкнувшихся витков.
Таким образом, использование предлагаемого способа позволяет разработать на его основе ряд устройств для защиты асинхронных двигателей от внутренних и в том числе витковых замыканий, обеспечивающих высокую селективность, быстродействие и возможность выявления витковых замыканий при малом числе замкнувшихся витков.
Использование предлагаемого способа защиты асинхронных двигателей от витковых замыканий обеспечивает по сравнению с существующими способами следующие преимущества.
Во-первых, повышение селективности действия в условиях переходных режимов. В отличие от прототипа осуществляется контроль параметров эквивалентного активного сопротивления и эквивалентной индуктивности электрической цепи, которые могут использоваться при строгом анализе электрических цепей в переходных режимах.
Во-вторых, контроль скольжения двигателя позволяет отделить витковые замыкания от режимов нормального пуска и снизить вероятность ложных отключений.
Источники информации
1. Федосеев А.М. Релейная защита электрических систем. М., «Энергия», 1970, с.493.
2. Авторское свидетельство №473124, кл. G01R 27/16, 1973.
3. Вольдек А.И. Электрические машины. Л., «Энергия», 1974, с.840, ил.
4. Атабеков Г.И. Основы теории цепей. Учебник для вузов. М., «Энергия», 1969, с.424, ил.
5. Карантаров П.Л., Цейтлин Л.А. Расчет индуктивностей: Справочная книга. Л.: Энергоатомиздат. Ленинградское отделение, 1986, с.488, ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФУНКЦИОНАЛЬНОЙ ДИАГНОСТИКИ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2008 |
|
RU2351048C1 |
| СПОСОБ ДИАГНОСТИКИ МЕЖВИТКОВЫХ ЗАМЫКАНИЙ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2013 |
|
RU2529596C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2502079C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2570363C1 |
| Устройство для защиты трехфазного синхронного электродвигателя от внешних и внутренних коротких замыканий и анормальных режимов | 1981 |
|
SU1053208A1 |
| СПОСОБ РАННЕГО ОБНАРУЖЕНИЯ МЕЖВИТКОВОГО ЗАМЫКАНИЯ В ОБМОТКАХ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2022 |
|
RU2788305C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНЫХ ПАРАМЕТРОВ АСИНХРОННОЙ МАШИНЫ С ФАЗНЫМ РОТОРОМ | 2022 |
|
RU2785209C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2022 |
|
RU2789019C1 |
| СПОСОБ ЗАЩИТЫ ОТ ПЕРЕНАПРЯЖЕНИЙ ЭЛЕКТРИЧЕСКИХ СЕТЕЙ ПОСТОЯННОГО ТОКА | 2006 |
|
RU2321124C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2019 |
|
RU2705939C1 |

Использование: для защиты асинхронного двигателя от витковых замыканий в обмотке статора. Технический результат заключается в повышении селективности и быстродействия защиты. В способе измеряют мгновенные значения токов и напряжений на зажимах двигателя, преобразуют их в напряжения, пропорциональные току и напряжению, измеряют скольжение двигателя, регистрируют полученные, пропорциональные току и напряжению сигналы, по ним определяют начальную фазу возникновения переходного процесса и начальное значение тока, вычисляют последующие мгновенные значения тока при исходных значениях эквивалентного активного сопротивления и эквивалентной индуктивности электродвигателя, вычисленные мгновенные значения тока сравнивают с соответствующими зарегистрированными значениями, определяют их разность и, в зависимости от ее величины, изменяют значения эквивалентного активного сопротивления и эквивалентной индуктивности до достижения разностью между зарегистрированными и вычисленными значениями тока минимального значения, полученные при этом значения эквивалентного активного сопротивления и эквивалентной индуктивности электродвигателя, при измеренном значении скольжения, сравнивают с допустимыми значениями, и если они выходят за пределы допустимых значений, формируют сигнал на отключение. 2 з.п. ф-лы, 8 ил.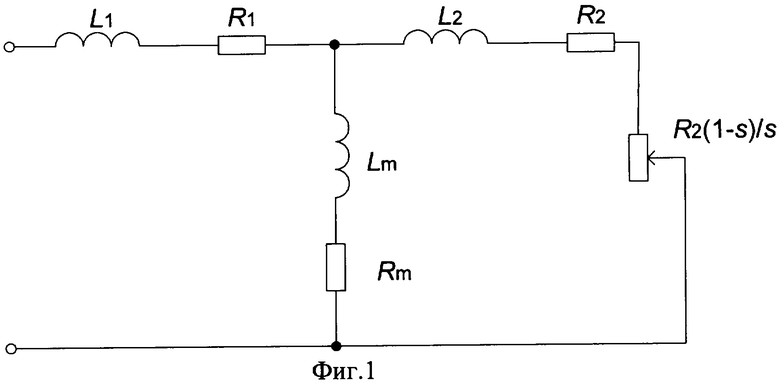
| Устройство для контроля полного сопротивления электрических систем | 1973 |
|
SU473124A1 |
| RU 22168824 C1, 10.06.2001 | |||
| Способ защиты от перегрузки асинхронных электродвигателей | 1986 |
|
SU1436175A1 |
| Способ токовой защиты асинхронного электродвигателя | 1988 |
|
SU1582262A1 |
| US 4081851 A, 28.03.1978. | |||

