Изобретение относится к автоматизированному электроприводу и может быть использовано для построения адаптивных систем управления двигателями постоянного тока.
Известен способ определения параметров электродвигателя постоянного тока [RU 2030088 С1, МПК6 Н02Р5/06, опубл. 27.02.1995], выбранный в качестве прототипа, заключающийся в том, что в процессе функционирования электродвигателя под действием сигнала выходного управляющего напряжения U0 измеряют значения тока в якорной обмотке i, производной по времени от тока i' и частоты вращения выходного вала электродвигателя ω. На основании полученных значений формируют произведения i⋅r, i'⋅L, ω⋅с, где r, L, с - значения оценок параметров, выработанные в процессе работы устройства в текущий момент времени. В начальный момент времени tн величины значения оценок параметров rн могут быть установлены произвольными, в том числе равными нулю. С помощью полученных произведений формируют сигнал выходного управляющего напряжения в текущий момент времени U, в соответствии с уравнением
U=r⋅i+L⋅i'+c ω.
Полученный сигнал U сравнивают с сигналом U0. Сигнал ошибки (невязки) ΔU=U-U0 умножают на сигналы i, i', ω. Полученные произведения ΔU⋅i, ΔU⋅i', ΔU⋅ω, масштабирую с помощью настроенных коэффициентов Kr, KL и Kω соответственно, а затем интегрируют с постоянной времени Т. После интегрирования формируют текущие значения оценок: r - активное сопротивление якорной обмотки, L - индуктивность якорной обмотки, с - постоянная ЭДС. Эти значения передают для формирования произведений i⋅r, i'⋅L, ω⋅с в текущий момент времени.
С помощью этого способа можно определить только активное сопротивление якорной обмотки, индуктивность якорной обмотки, коэффициент, характеризующий связь между током и электромагнитным моментом электродвигателя постоянного тока (постоянная ЭДС), но нельзя определить эквивалентный момент инерции, приведенный к валу электродвигателя и момент сопротивления нагрузки на валу электродвигателя постоянного тока в режиме реального времени.
Техническим результатом изобретения является расширение арсенала средств аналогичного назначения.
Предложенный способ определения параметров электродвигателя постоянного тока, также как в прототипе, заключается в измерении тока в якорной обмотке, частоты вращения выходного вала, и в определении активного сопротивления и индуктивности якорной обмотки, коэффициента, характеризующего связь между током и электромагнитным моментом электродвигателя постоянного тока (постоянной ЭДС).
Согласно изобретению в течение пуска и работы электродвигателя постоянного тока одновременно измеряют мгновенные величины тока и напряжения в якорной обмотке и частоту вращения выходного вала. Измеренные мгновенные величины тока и напряжения в якорной обмотке и частоту вращения выходного вала проходят процедуру цифрового дифференцирования, тем самым получая производные тока и напряжения в якорной обмотке и частоты вращения выходного вала. Последовательно выполняют две временные задержки мгновенных величин и производных тока и напряжения в якорной обмотке, частоты вращения выходного вала. Полученные текущие и задержанные единожды и дважды мгновенные величины и производные тока и напряжения в якорной обмотке и частоты вращения выходного вала запоминают и используют для определения активного сопротивления якорной обмотки, индуктивности якорной обмотки, коэффициента, характеризующего связь между током и электромагнитным моментом электродвигателя постоянного тока в режиме реального времени следующим образом:



где R - активное сопротивление якорной обмотки, Ом;
L - индуктивность якорной обмотки, Гн;
с - коэффициент, характеризующий связь между током и электромагнитным моментом электродвигателя постоянного тока, В⋅с/рад;
U, Uz1, Uz2 - мгновенные величины напряжения в якорной обмотке без задержки, единожды и дважды задержанные, соответственно, В;
I, Iz1, Iz2 - мгновенные величины тока в якорной обмотке без задержки, единожды и дважды задержанные, соответственно, А;
ω, ωz1, ωz2 - мгновенные величины частоты вращения выходного вала без задержки, единожды и дважды задержанные, соответственно, рад/с;
 ,
,  ,
,  - мгновенные величины производной тока в якорной обмотке без задержки, единожды и дважды задержанные, соответственно, А/с.
- мгновенные величины производной тока в якорной обмотке без задержки, единожды и дважды задержанные, соответственно, А/с.
Полученное значение коэффициента с, характеризующего связь между током и электромагнитным моментом электродвигателя постоянного тока и запомненные мгновенные величины и производные тока и напряжения якорной обмотки и частоты вращения выходного вала используют для определения эквивалентного момента инерции, приведенного к валу электродвигателя и момента сопротивления нагрузки на валу электродвигателя постоянного тока в режиме реального времени следующим образом:
где J - эквивалентный момент инерции, приведенного к валу электродвигателя, кг⋅м2;
Мс - момент сопротивления нагрузки на валу электродвигателя постоянного тока, Н⋅м;
 ,
,  - мгновенные величины производной частоты вращения выходного вала без задержки и единожды задержанные, соответственно, рад/с2.
- мгновенные величины производной частоты вращения выходного вала без задержки и единожды задержанные, соответственно, рад/с2.
Предложенный способ, в отличие от прототипа, позволяет определять в режиме реального времени активное сопротивление якорной обмотки, индуктивность якорной обмотки, коэффициент, характеризующий связь между током и электромагнитным моментом электродвигателя постоянного тока, эквивалентный момент инерции, приведенный к валу электродвигателя и момент сопротивления нагрузки на валу электродвигателя постоянного тока.
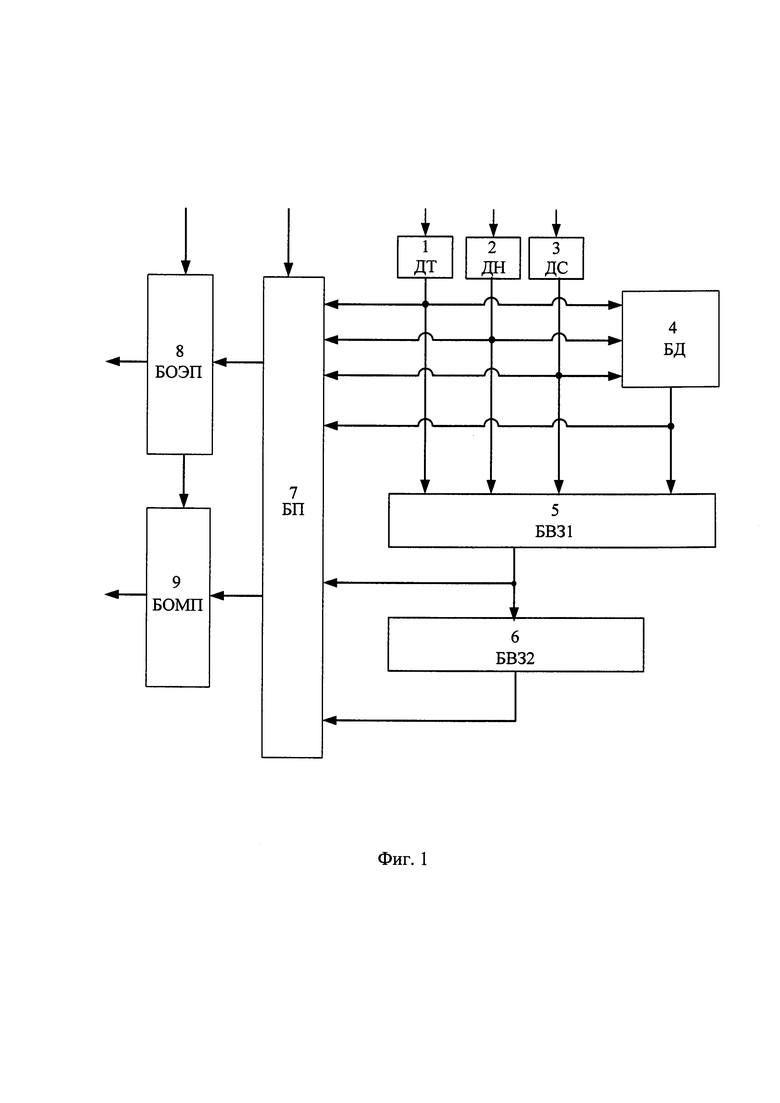
На фиг. 1 приведена схема устройства для определения параметров электродвигателя постоянного тока.
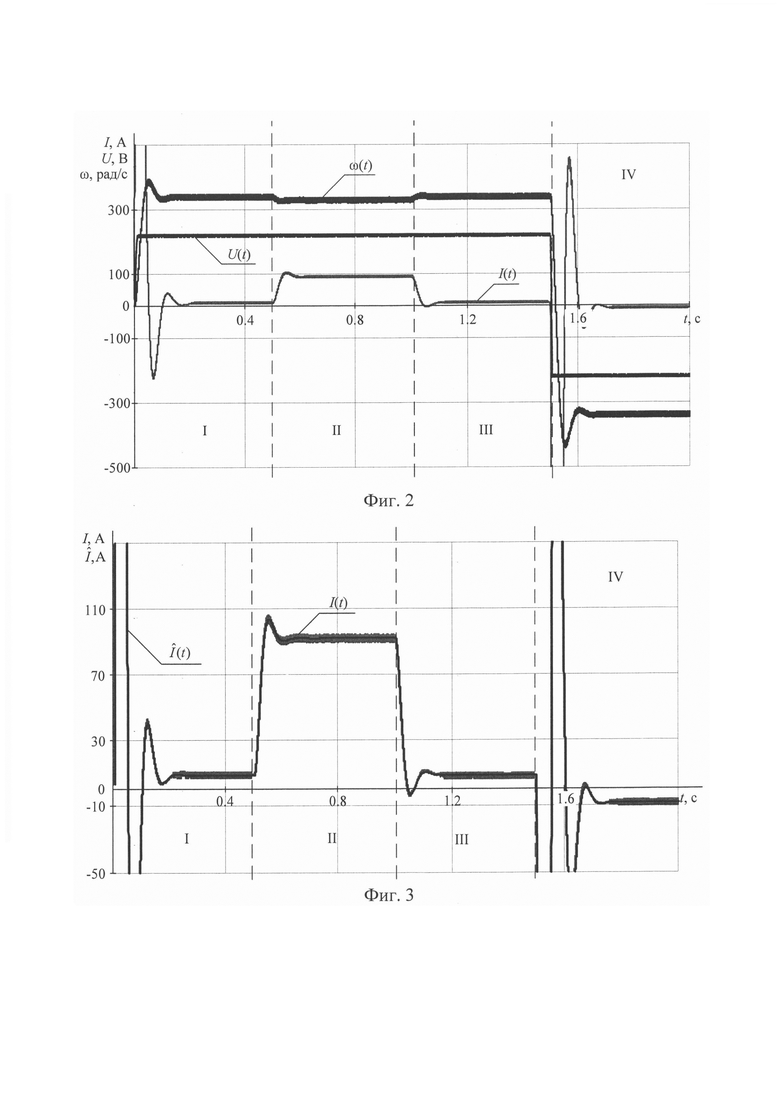
На фиг. 2 представлены графики переходных процессов тока I(t) и напряжения U(t) в якорной обмотке и частоты вращения выходного вала ω(t). Эксперимент проводили в различных режимах работы: I - пуск и работа двигателя на холостом ходу, II - «наброс» нагрузки и работа двигателя под нагрузкой, III - «сброс» нагрузки и работа двигателя на холостом ходу, IV - реверс двигателя и работа на холостом ходу.
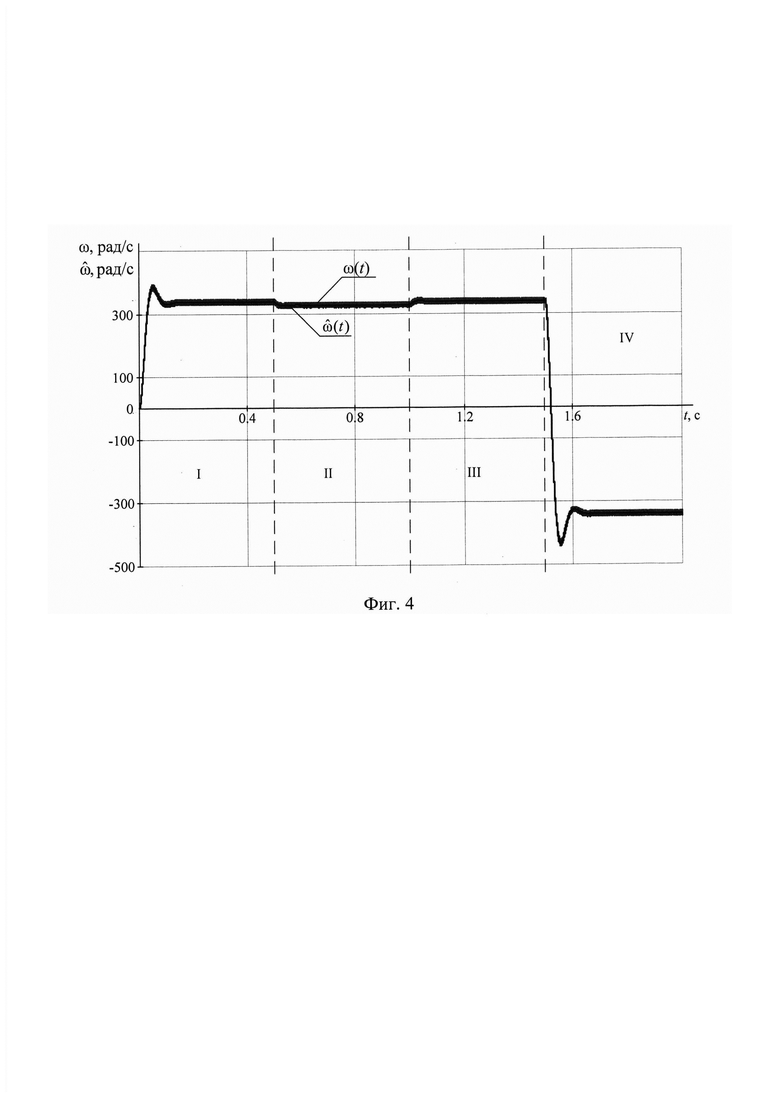
На фиг. 3 представлены графики переходных процессов тока, где I(t) - экспериментальная кривая тока в якорной обмотке,  - расчетная кривая тока в якорной обмотке (I - пуск и работа двигателя на холостом ходу, II - «наброс» нагрузки и работа двигателя под нагрузкой, III - «сброс» нагрузки и работа двигателя на холостом ходу, IV - реверс двигателя и работа на холостом ходу).
- расчетная кривая тока в якорной обмотке (I - пуск и работа двигателя на холостом ходу, II - «наброс» нагрузки и работа двигателя под нагрузкой, III - «сброс» нагрузки и работа двигателя на холостом ходу, IV - реверс двигателя и работа на холостом ходу).
На фиг. 4 приведены графики переходных процессов частоты вращения выходного вала, где ω(t) - экспериментальная кривая частоты вращения выходного вала,  - расчетная кривая частоты вращения выходного вала (I - пуск и работа двигателя на холостом ходу, II - «наброс» нагрузки и работа двигателя под нагрузкой, III - «сброс» нагрузки и работа двигателя на холостом ходу, IV - реверс дивгателя и работа на холостом ходу).
- расчетная кривая частоты вращения выходного вала (I - пуск и работа двигателя на холостом ходу, II - «наброс» нагрузки и работа двигателя под нагрузкой, III - «сброс» нагрузки и работа двигателя на холостом ходу, IV - реверс дивгателя и работа на холостом ходу).
В таблице 1 представлены параметры двигателя постоянного тока, определенные с помощью предложенного способа.
Способ определения параметров электродвигателя постоянного тока осуществлен с помощью устройства (фиг. 1), содержащего датчик тока 1 (ДТ) и датчик напряжения 2 (ДН), подключенные к якорной обмотке электродвигателя постоянного тока, а также датчик частоты вращения выходного вала 3 (ДС), который установлен на валу электродвигателя. К датчику тока 1 (ДТ), датчику напряжения 2 (ДН) и датчику частоты вращения выходного вала 3 (ДС) подключен блок дифференцирования 4 (БД). К датчику тока 1 (ДТ), датчику напряжения 2 (ДН), датчику частоты вращения выходного вала 3 (ДС) и к блоку дифференцирования 4 (БД) последовательно подключены первый блок временной задержки 5 (БВЗ1), второй блок временной задержки 6 (БВЗ2), блок памяти 7 (БП), блок определения электрических параметров 8 (БОЭП). Блок памяти 7 (БП) соединен с датчиком тока 1 (ДТ), датчиком напряжения 2 (ДН), датчиком частоты вращения выходного вала 3 (ДС), блоком дифференцирования 4 (БД), первым блоком временной задержки 5 (БВЗ1) и вторым блоком временной задержки 6 (БВЗ2). Блок определения электромеханических параметров 9 (БОМП) соединен с блоком памяти 7 (БП) и блоком определения электрических параметров 8 (БОЭП). Управляющие входы блока памяти 7 (БП) и блока определения электрических параметров 8 (БОЭП) соединены с системой управления электродвигателя постоянного тока (не показана на фиг. 1). Блок определения электрических параметров 8 (БОЭП) и блок определения электромеханических параметров 9 (БОМП) связан с ЭВМ (не показано на фиг. 1).
В качестве датчика тока 1 (ДТ) использован промышленный прибор КЭИ-0,1. В качестве датчика напряжения 2 (ДН) использован датчик напряжения LEM. В качестве датчика частоты вращения выходного вала 3 (ДС) может быть использован тахогенератор. Блок дифференцирования 4 (БД), первый блок временной задержки 5 (БВЗ1), второй блок временной задержки 6 (БВЗ2), блок памяти 7 (БП), блок определения электрических параметров 8 (БОЭП), блок определения электромеханических параметров 9 (БОМП) и система управления двигателем постоянного тока выполнены на базе микроконтроллера типа TMS320C28346 фирмы Texas Instruments.
Для проверки работоспособности предложенного способа определения параметров электродвигателя постоянного тока датчик тока 1 (ДТ) и датчик напряжения 2 (ДН) были подключены к якорной обмотке электродвигателя постоянного тока (Uн=220 В, ωн=315 рад/с). Датчик частоты вращения выходного вала 3 (ДС) установлен на валу электродвигателя постоянного тока. В течении пуска и работы электродвигателя постоянного тока одновременно измерили мгновенные величины тока и напряжения в якорной обмотке и частоту вращения выходного вала (фиг. 2). Мгновенные величины тока и напряжения в якорной обмотке и частоту вращения выходного вала передали в блок дифференцирования 4 (БД), где получили производные тока и напряжения в якорной обмотке и частоты вращения выходного вала. Мгновенные величины и производные тока и напряжения в якорной обмотке и частоты вращения выходного вала передали на блоки временной задержки 5 (БВЗ1), 6 (БВЗ2), где последовательно выполнили две временные задержки мгновенных величин и производных тока и напряжения в якорной обмотке и частоты вращения выходного вала на 300⋅10-6 секунд и получили текущие, задержанные единожды и дважды, значения мгновенных величин и производных тока и напряжения в якорной обмотке и частоты вращения выходного вала. Полученные текущие и задержанные единожды и дважды мгновенные величины и производные тока в якорной обмотке I, Iz1, Iz2,  ,
,  ,
,  , напряжения в якорной обмотке U, Uz1, Uz2 и частоты вращения выходного вала ω, ωz1, ωz2,
, напряжения в якорной обмотке U, Uz1, Uz2 и частоты вращения выходного вала ω, ωz1, ωz2,  ,
,  передали в блок памяти 7 (БП).
передали в блок памяти 7 (БП).
В момент включения в сеть электродвигателя постоянного тока система управления подавала на управляющий вход блока памяти 7 (БП) сигнал о пуске электродвигателя постоянного тока, по этому сигналу в течении пуска и работы электродвигателя постоянного тока с временной задержкой начали запись мгновенных величин и производных тока и напряжения в якорной обмотке и частоты вращения выходного вала. Одновременно в момент включения в сеть электродвигателя постоянного тока система управления подала сигнал на управляющие входы блока определения электрических параметров 8 (БОЭП). Передачу сигналов с блока памяти 7 (БП) на блок определения электрических параметров 8 (БОЭП) осуществили с временной задержкой равной 300⋅10-6. В блоке определения электрических параметров 8 (БОЭП) произвели определение активного сопротивления якорной обмотки, индуктивности якорной обмотки, коэффициента, характеризующего связь между током и электромагнитным моментом электродвигателя постоянного тока в режиме реального времени следующим образом:



где R - активное сопротивление якорной обмотки, Ом;
L - индуктивность якорной обмотки, Гн;
с - коэффициент, характеризующий связь между током и электромагнитным моментом электродвигателя постоянного тока, В⋅с/рад;
U, Uz1, Uz2 - мгновенные величины напряжения в якорной обмотке без задержки, единожды и дважды задержанные, соответственно, В;
I, Iz1, Iz2 - мгновенные величины тока в якорной обмотке без задержки, единожды и дважды задержанные, соответственно, А;
ω, ωz1, ωz2 - мгновенные величины частоты вращения выходного вала без задержки, единожды и дважды задержанные, соответственно, рад/с;
 ,
,  ,
,  - мгновенные величины производной тока в якорной обмотке без задержки, единожды и дважды задержанные, соответственно, А/с.
- мгновенные величины производной тока в якорной обмотке без задержки, единожды и дважды задержанные, соответственно, А/с.
Полученное значение коэффициента с, характеризующего связь между током и электромагнитным моментом электродвигателя постоянного тока и запомненные мгновенные величины и производные тока и напряжения в якорной обмотке и частоты вращения выходного вала передали на блок определения электромеханических параметров 9 (БОМП), где определили эквивалентный момент инерции, приведенный к валу электродвигателя и момент сопротивления нагрузки на валу электродвигателя постоянного тока в режиме реального времени следующим образом:
где J - эквивалентный момент инерции, приведенный к валу электродвигателя, кг⋅м2;
Мс - момент сопротивления нагрузки на валу электродвигателя постоянного тока, Н⋅м;
 ,
,  - мгновенные величины производной частоты вращения выходного вала без задержки и единожды задержанные, соответственно, рад/с2.
- мгновенные величины производной частоты вращения выходного вала без задержки и единожды задержанные, соответственно, рад/с2.
Результаты определения электрических и электромеханических параметров, поступившие на ЭВМ показаны в таблице 1.
Проверку правильности определения параметров электродвигателя постоянного тока осуществляли:
1. Путем сравнения определенных значений параметров двигателя постоянного тока с реальными значениями параметров, указанных в паспортных данных двигателя постоянного тока (таблица 1). Определили относительную погрешность между реальными значениями параметров асинхронного электродвигателя и параметрами, найденными заявленным способом. Относительная погрешность каждого из параметров составила менее 2%, что является допустимым в электроприводах общего назначения.
2. Путем сравнения переходных процессов расчетного тока  и экспериментального тока I(t) в якорной обмотке (фиг. 3), сравнения переходных процессов расчетной частоты вращения выходного вала
и экспериментального тока I(t) в якорной обмотке (фиг. 3), сравнения переходных процессов расчетной частоты вращения выходного вала  и экспериментальной частотой вращения выходного вала ω(t) (фиг. 4). Для расчета переходных процессов использовали математическую модель электродвигателя постоянного тока [Проектирование и исследование автоматизированных электроприводов. Часть 3. Электрические машины постоянного тока в системах автоматизированного электропривода / Л.С. Удут, О.П. Мальцева, Н.В. Кояин. - Томск: Изд. ТПУ, 2007. - С. 17-37]. После расчета переходных процессов тока в якорной обмотке и частоты вращения выходного вала электродвигателя постоянного тока с идентифицированными параметрами были определены критерии соответствия, которые показали относительные отклонения оценок тока в якорной обмотке σI=1,27% и частоты вращения выходного вала σω=1,19% от экспериментальных значений. Из приведенного сравнения видно, что расчетные графики переходных процессов тока в якорной обмотке и частоты вращения выходного вала соответствуют экспериментальным, следовательно, погрешность определения параметров незначительна.
и экспериментальной частотой вращения выходного вала ω(t) (фиг. 4). Для расчета переходных процессов использовали математическую модель электродвигателя постоянного тока [Проектирование и исследование автоматизированных электроприводов. Часть 3. Электрические машины постоянного тока в системах автоматизированного электропривода / Л.С. Удут, О.П. Мальцева, Н.В. Кояин. - Томск: Изд. ТПУ, 2007. - С. 17-37]. После расчета переходных процессов тока в якорной обмотке и частоты вращения выходного вала электродвигателя постоянного тока с идентифицированными параметрами были определены критерии соответствия, которые показали относительные отклонения оценок тока в якорной обмотке σI=1,27% и частоты вращения выходного вала σω=1,19% от экспериментальных значений. Из приведенного сравнения видно, что расчетные графики переходных процессов тока в якорной обмотке и частоты вращения выходного вала соответствуют экспериментальным, следовательно, погрешность определения параметров незначительна.
3. Момент сопротивления нагрузки на валу электродвигателя постоянного тока Мс невозможно измерить и данная величина имеет переменный характер, связанный с режимом работы двигателя. Однако Мс влияет на внешний вид переходных характеристик тока в якорной обмотке и частоты вращения выходного вала электродвигателя постоянного тока. Проверку правильности определения момента сопротивления нагрузки на валу электродвигателя постоянного тока осуществили путем сравнения переходных процессов расчетного тока  и экспериментального тока I(t) в якорной обмотке (фиг. 3) и сравнения переходных процессов расчетной частоты вращения выходного вала
и экспериментального тока I(t) в якорной обмотке (фиг. 3) и сравнения переходных процессов расчетной частоты вращения выходного вала  и экспериментальной частотой вращения выходного вала ω(t) (фиг. 4) в различных режимах работы двигателя: пуск и работа двигателя на холостом ходу; «наброс» нагрузки и работа двигателя под нагрузкой; «сброс» нагрузки и работа двигателя на холостом ходу; реверс двигателя и работа на холостом ходу.
и экспериментальной частотой вращения выходного вала ω(t) (фиг. 4) в различных режимах работы двигателя: пуск и работа двигателя на холостом ходу; «наброс» нагрузки и работа двигателя под нагрузкой; «сброс» нагрузки и работа двигателя на холостом ходу; реверс двигателя и работа на холостом ходу.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2022 |
|
RU2789019C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2019 |
|
RU2718708C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2570363C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2011 |
|
RU2476983C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2564692C1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ | 1991 |
|
RU2030088C1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ | 2008 |
|
RU2366070C1 |
| АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2544483C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2502079C1 |
| СПОСОБ ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ АСИНХРОННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2822608C1 |
Изобретение относится к автоматизированному электроприводу и может быть использовано для определения параметров электродвигателей постоянного тока. Способ определения параметров двигателя постоянного тока заключается в том, что одновременно измеряют мгновенные величины тока и напряжения в якорной обмотке и частоту вращения выходного вала. Измеренные мгновенные величины тока и напряжения в якорной обмотке и частоту вращения выходного вала дифференцируют, получая производные тока и напряжения в якорной обмотке и частоты вращения выходного вала. Последовательно выполняют две временные задержки мгновенных величин и производных тока и напряжения в якорной обмотке, частоты вращения выходного вала. Полученные текущие и задержанные единожды и дважды мгновенные величины и производные тока и напряжения в якорной обмотке и частоты вращения выходного вала запоминают и используют для определения активного сопротивления якорной обмотки, индуктивности якорной обмотки, коэффициента, характеризующего связь между током и электромагнитным моментом электродвигателя постоянного тока в режиме реального времени. Полученное значение коэффициента, характеризующего связь между током и электромагнитным моментом электродвигателя постоянного тока и запомненные мгновенные величины и производные тока и напряжения в якорной обмотке и частоты вращения выходного вала используют для определения эквивалентного момента инерции, приведённого к валу электродвигателя и момента сопротивления нагрузки на валу электродвигателя постоянного тока в режиме реального времени. 4 ил., 1 табл.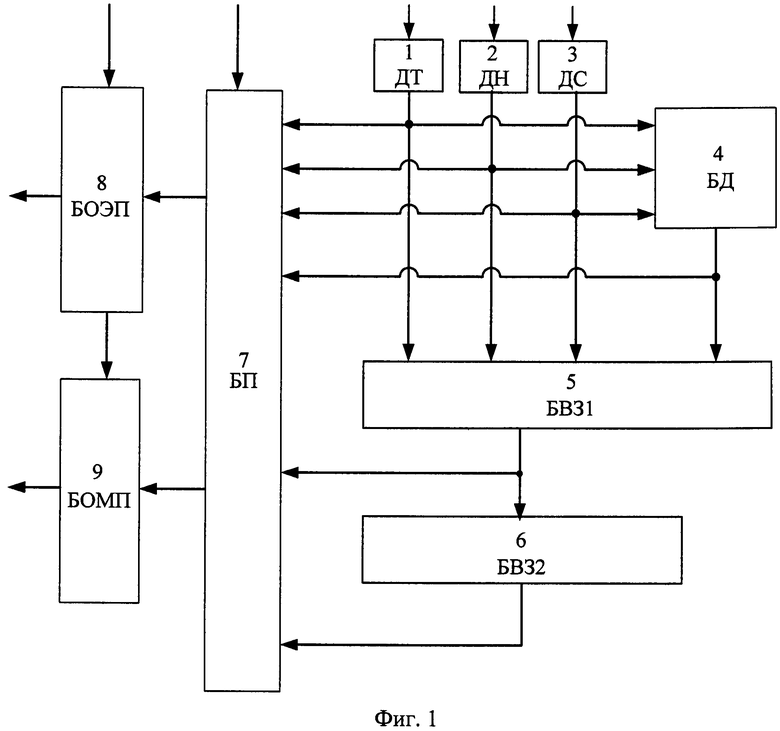
Способ определения параметров электродвигателя постоянного тока, включающий измерение тока в якорной обмотке, частоты вращения выходного вала, и определение активного сопротивления и индуктивности якорной обмотки, коэффициента, характеризующего связь между током и электромагнитным моментом электродвигателя постоянного тока, отличающийся тем, что в течение пуска и работы электродвигателя постоянного тока одновременно измеряют мгновенные величины тока и напряжения в якорной обмотке и частоту вращения выходного вала, измеренные мгновенные величины тока и напряжения якорной обмотки и частоту вращения выходного вала дифференцируют, получая производные тока и напряжения в якорной обмотке и частоты вращения выходного вала, последовательно выполняют две временные задержки мгновенных величин и производных тока и напряжения в якорной обмотке, частоты вращения выходного вала, полученные текущие и задержанные единожды и дважды мгновенные величины и производные тока и напряжения в якорной обмотке и частоты вращения выходного вала запоминают и используют для определения активного сопротивления якорной обмотки, индуктивности якорной обмотки, коэффициента, характеризующего связь между током и электромагнитным моментом электродвигателя постоянного тока в режиме реального времени следующим образом:



где R – активное сопротивление якорной обмотки, Ом;
L – индуктивность якорной обмотки, Гн;
с – коэффициент, характеризующий связь между током и электромагнитным моментом электродвигателя постоянного тока, В⋅с/рад;
U, Uz1, Uz2 – мгновенные величины напряжения в якорной обмотке без задержки, единожды и дважды задержанные, В;
I, Iz1, Iz2 – мгновенные величины тока в якорной обмотке без задержки, единожды и дважды задержанные, А;
ɷ, ɷz1, ɷz2 – мгновенные величины частоты вращения выходного вала без задержки, единожды и дважды задержанные, рад/с;



полученное значение коэффициента с, характеризующего связь между током и электромагнитным моментом электродвигателя постоянного тока, и запомненные мгновенные величины и производные тока и напряжения в якорной обмотке и частоты вращения выходного вала используют для определения эквивалентного момента инерции, приведённого к валу электродвигателя, и момента сопротивления нагрузки на валу электродвигателя постоянного тока в режиме реального времени следующим образом:
где J – эквивалентный момент инерции, приведённый к валу электродвигателя, кг⋅м2;
Мс – момент сопротивления нагрузки на валу электродвигателя постоянного тока, Н⋅м;


| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2502079C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2570363C1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ | 2008 |
|
RU2366070C1 |
| Устройство для определения параметров электродвигателей постоянного тока | 1979 |
|
SU789976A1 |
| ПРОЛЕКАРСТВО НА ОСНОВЕ УРИДИНФОСФОРАМИДА, СПОСОБ ЕГО ПОЛУЧЕНИЯ И ЕГО ПРИМЕНЕНИЯ В МЕДИЦИНЕ | 2017 |
|
RU2740760C2 |

