Изобретение относится к электротехнике, а именно к определению индуктивности рассеяния обмотки статора, индуктивности рассеяния обмотки ротора, индуктивности главного контура намагничивания и может быть использовано на предприятиях по производству и ремонту асинхронных машин с фазным ротором.
Известен способ определения индуктивности рассеяния фазы обмотки статора асинхронного электродвигателя путем гашения магнитного поля [RU 2422839 С1, МПК G01R 27/26 (2006.01), опубл. 27.06.2011], выбранный в качестве прототипа, заключающийся в измерении постоянного напряжения U0 и тока обмотки статора до гашения поля и измерении производной тока в начальный момент времени гашения магнитного поля. Гашение поля осуществляют при неподвижном роторе путем замыкания накоротко обмотки статора, соединенной по трехфазной схеме. Измеряют величину производной затухающего тока обмотки статора (di1/dt)t=0 в начальный момент времени переходного процесса гашения поля и вычисляют значение индуктивности рассеяния фазы обмотки статора асинхронного двигателя как
где U0 - постоянное напряжение, приложенное к обмотке статора до проведения гашения поля;
 - производная тока обмотки статора в начале переходного процесса его затухания;
- производная тока обмотки статора в начале переходного процесса его затухания;
k - коэффициент, зависящий от схемы соединения фаз обмотки статора.
Однако с помощью этого способа невозможно определить электромагнитные параметры ротора асинхронного двигателя.
Техническим результатом заявленного изобретения является увеличение числа определяемых электромагнитных параметров асинхронной машины с фазным ротором, которая может работать, как в двигательном, так и в генераторном режимах.
Предложенный способ определения электромагнитных параметров асинхронной машины с фазным ротором, также как в прототипе, включает измерение тока в обмотке статора и определение значения индуктивности рассеивания фазы обмотки статора асинхронного двигателя.
Согласно изобретению сначала соединяют в звезду статорные и роторные обмотки при неподвижном выходном вале, измеряют активное сопротивление двух последовательно включенных обмоток статора и определяют сопротивление обмотки статора. Далее измеряют активное сопротивление двух последовательно включенных обмоток ротора и определяют приведенное к статору активное сопротивление ротора. После этого роторные обмотки замыкают между собой, постоянное напряжение подают в контур из двух параллельно соединенных обмоток статора и последовательно с ними включенной третьей обмоткой до достижения током установившегося значения, которое измеряют и запоминают. Затем статорные обмотки отключают от источника постоянного напряжения и замыкают между собой, вызывая затухание тока, во время которого измеряют и запоминают мгновенные значения затухающего тока в указанной третьей обмотке. Полученные мгновенные значения токов используют для определения индуктивности рассеяния, величина которой принята равной для статорной и роторной обмоток, индуктивности главного контура намагничивания асинхронной машины с фазным ротором путем минимизации целевой функции двух переменных  ,
, 

где  - оценка искомой индуктивности рассеяния обмотки статора и приведенной к статору обмотки ротора, Гн;
- оценка искомой индуктивности рассеяния обмотки статора и приведенной к статору обмотки ротора, Гн;
 - оценка искомой индуктивности главного контура намагничивания;
- оценка искомой индуктивности главного контура намагничивания;
Δt - период дискретизации, с которым производят измерение мгновенных значений затухающего тока обмотки статора, с;
n - текущий шаг расчета целевой функции  ,
,  ), о.е.;
), о.е.;
m - общее количество измерений, произведенных при затухании тока обмотки статора, о.е.;
n⋅Δt=t - значение времени от момента начала затухания тока статора, с;
i_эксп(t) - мгновенные измеренные значения затухающего тока статора, А;
i_мод(t,  ,
,  ) - мгновенные значения затухающего тока статора настраиваемой модели асинхронной машины с фазным ротором, А, определяемое из выражения:
) - мгновенные значения затухающего тока статора настраиваемой модели асинхронной машины с фазным ротором, А, определяемое из выражения:

где
где i_эксп0 - установившееся значение тока, измеренное в обмотке статора, А;
R1 - измеренное активное сопротивления обмотки статора, Ом;
R2'- приведенное к статору измеренное активное сопротивление обмотки ротора, Ом.
Таким образом, предложенный способ позволяет одновременно определять индуктивность рассеяния обмотки статора, индуктивность рассеяния обмотки ротора и индуктивность главного контура намагничивания асинхронной машины с фазным ротором, при этом, в отличие от прототипа, не требуется измерять напряжение, прикладываемое к обмотке статора.
На фиг. 1 представлена схема устройства для осуществления способа определения электромагнитных параметров асинхронной машины с фазным ротором.
На фиг. 2 приведена схема коммутации полевых n-канальных транзисторов, необходимая для корректного процесса подачи постоянного напряжения на обмотки статора асинхронной машины с фазным ротором до достижения током в обмотках статора установившегося значения.
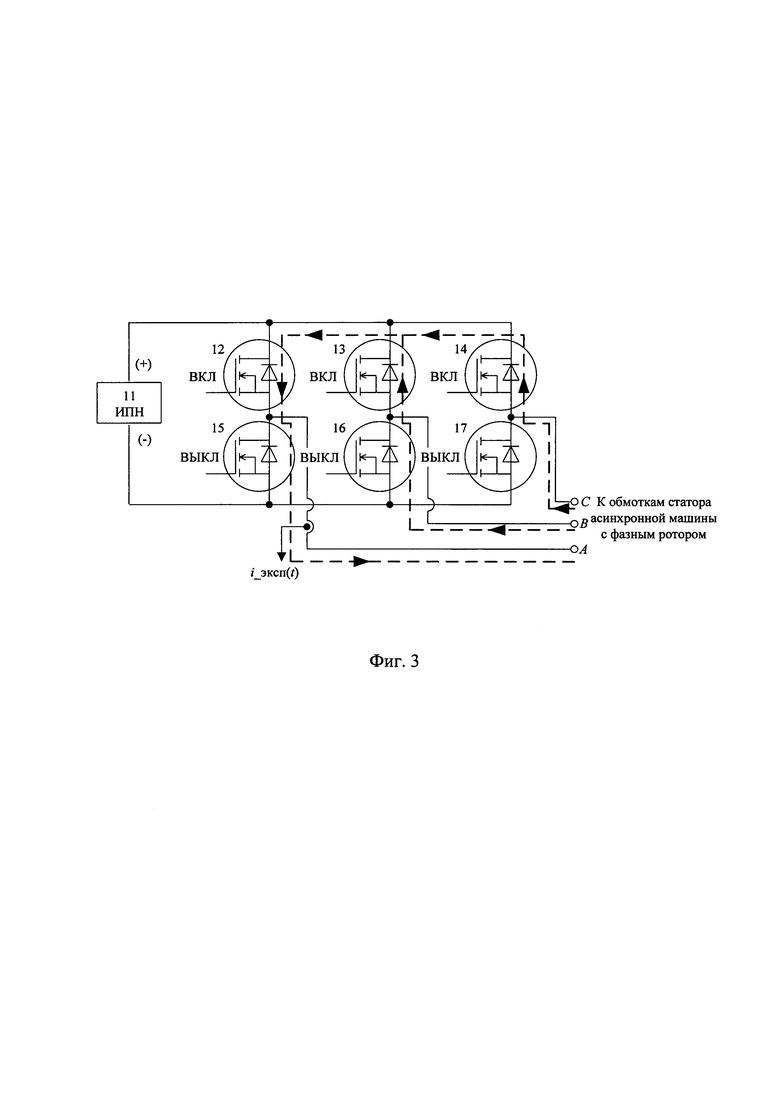
На фиг. 3 приведена схема коммутации полевых n-канальных транзисторов, необходимая для корректного процесса затухания тока в обмотках статора асинхронной машины с фазным ротором.
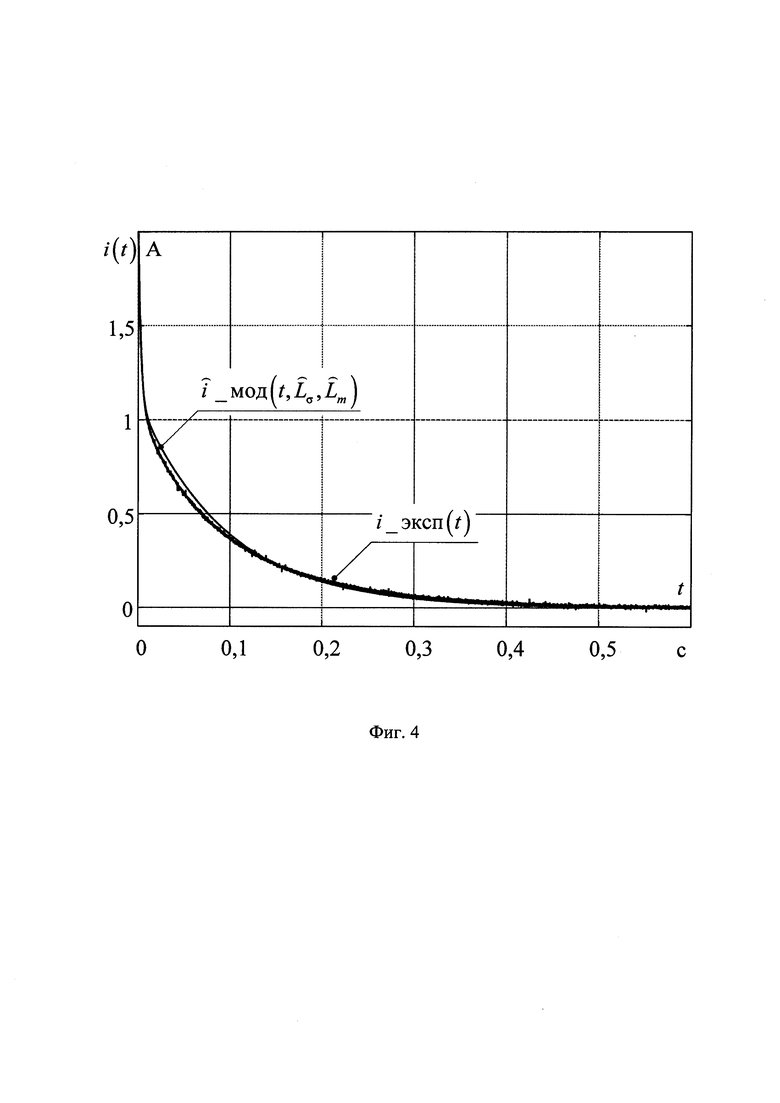
На фиг. 4 приведены графики переходных процессов тока, где, i_эксп(t) - мгновенные измеренные значения затухающего тока статора асинхронной машины с фазным ротором, i_мод(t,  ,
,  ) - мгновенные значения затухающего тока статора настраиваемой модели асинхронной машины с фазным ротором, полученные с помощью параметров, определенных согласно предложенному способу.
) - мгновенные значения затухающего тока статора настраиваемой модели асинхронной машины с фазным ротором, полученные с помощью параметров, определенных согласно предложенному способу.
Способ определения электромагнитных параметров асинхронной машины с фазным ротором осуществлен с помощью устройства (фиг. 1), которое содержит блок измерения сопротивления 1 (БИС), подключенный к концам одной из статорных обмоток асинхронной машины с фазным ротором (не показано на фиг. 1). К блоку измерения сопротивления 1 (БИС) подключен блок памяти 2 (БП). К обмотке статора асинхронной машины с фазным ротором (не показан на фиг. 1) подключен блок коммутации 3 (БК), к которому подключен датчик тока 4 (ДТ). К датчику тока 4 (ДТ) подключен блок памяти 2 (БП). К блоку памяти 2 (БП) подключены блок вычисления показательных функций 5 (БВПФ) и блок вычисления вспомогательных функций 6 (БВВФ), к которым последовательно подключены блок настраиваемой регрессионной модели 7 (БНРМ), блок вычисления целевой функции 8 (БВЦФ), блок минимизации целевой функции 9 (БМЦФ) и устройство вывода информации 10 (УВИ). Блок памяти 2 (БП) соединен с блоком вычисления целевой функции 8 (БВЦФ). К блоку минимизации целевой функции 9 (БМЦФ) подключен блок вычисления показательных функций 5 (БВПФ) и блок вычисления вспомогательных функций 6 (БВВФ). Управляющий вход блока минимизации целевой функции 9 (БМЦФ) подключен к системе управления асинхронной машиной с фазным ротором (не показана на фиг. 1).
Блок коммутации 3 (БК) содержит источник постоянного напряжения 11 (ИПН), положительный полюс которого подключен к стокам первого 12, второго 13, и третьего 14 полевых N-канальных транзисторов с индуцированным каналом (фиг. 2, 3). Отрицательный полюс источника постоянного напряжения 11 (ИПН) подключен к истокам четвертого 15, пятого 16 и шестого 17 полевых N-канальных транзисторов с индуцированным каналом. К истоку первого транзистора 12 подключен сток четвертого транзистора 15 и обмотка статора А асинхронной машины с фазным ротором. К истоку второго транзистора 13 подключен сток пятого транзистора 16 и обмотка статора В асинхронной машины. К истоку третьего транзистора 14 подключен сток шестого транзистора 17 и обмотка статора С асинхронной машины. Затворы полевых N-канальных транзисторов с индуцированным каналом 12-17 подключены к системе управления асинхронной машиной с фазным ротором (не показана на фиг. 2, 3).
В качестве блока измерения сопротивления 1 (БИС) использован цифровой мультиметр Keithley 2100. Блок памяти 2 (БП), блок вычисления показательных функций 5 (БВПФ), блок вычисления вспомогательных функций 6 (БВВФ), блок настраиваемой регрессионной модели 7 (БНРМ), блок вычисления целевой функции 8 (БВЦФ), блок минимизации целевой функции 9 (БМЦФ), и система управления асинхронной машиной с фазным ротором выполнены на базе микроконтроллера типа TMS320C28346 фирмы Texas Instruments. В качестве датчика тока 4 (ДТ) использован промышленный прибор КЭИ-0,1. В качестве устройства вывода информации 10 (УВИ) использован символьный дисплей BCB0802-02-BL. В качестве источника постоянного напряжения 11 (ИПН) использован GW INSTEK GPS-4303. В качестве полевых N-канальных транзисторов с индуцированным каналом 12-17 использованы MOSFET транзисторы N-типа IRFP7530PBF.
Для осуществления предложенного способа определения параметров асинхронной машины с фазным ротором, который неподвижен, обмотки статора и ротора асинхронной машины с фазным ротором МТН011-6УЛ (мощность двигателя 1,4 кВт, номинальная скорость 890 об/мин, номинальное напряжение обмоток статора 380 В, номинальный ток обмоток статора 4,9 А, номинальное напряжение обмоток ротора 114 В, номинальный ток обмоток ротора 8,8 А) соединили в звезду. К концам двух обмоток статора А и В подключили блок измерения сопротивления 1 (БИС), с помощью которого определили значение активного сопротивления R1ИЗМ двух последовательно включенных обмоток статора А и В, а так же активное сопротивление обмотки статора А: R1=R1ИЗМ/2. Затем к концам двух последовательно включенных обмоток ротора подключили блок измерения сопротивления 1 (БИС), с помощью которого определили значение активного сопротивления R2ИЗМ этих двух обмоток ротора, на основании которого определили сопротивление любой одной из двух данных обмоток статора R2-R2ИЗМ/2. На основании значения R2 определили R2' - приведенное к статору активное сопротивление ротора [ГОСТ Р 53472-2009]. Полученные значения активного сопротивления обмотки статора R1 и приведенного к статору активного сопротивления обмотки ротора R2' передали в блок памяти 2 (БП), после этого замкнули все три обмотки ротора между собой.
Затем, используя блок коммутации 3 (БК), от источника постоянного напряжения 11 (ИПН) подали постоянное напряжение замыканием первого 12, пятого 16 и шестого 17 транзисторов на обмотки статора до достижения током в них установившегося значения, при этом стоки и истоки второго 13, третьего 14 и четвертого 15 транзисторов были разомкнуты (фиг. 2). В полученной таким образом схеме ток протекал от положительного полюса источника постоянного напряжения 11 (ИПН) к стоку первого транзистора 12, далее от истока первого транзистора 12 - к обмотке статора A (не показана на фиг. 2). Так как обмотка статора А асинхронной машины последовательно подключена к параллельно соединенным обмоткам статора В и С, то ток через обмотку статора А разделился на две части и протекал через обмотки статора В и С.Две части тока от обмоток статора В и С протекали к стокам пятого 16 и шестого 17 транзисторов. После прохождения истоков пятого 16 и шестого 17 транзисторов две части тока объединились. Полученный ток приходил к отрицательному полюсу источника постоянного напряжения 11 (ИПН). Постоянное напряжение продолжали подавать до достижения током установившегося значения. Данное установившееся значение тока i_эксп0 в обмотке статора А измеряли с помощью датчика тока 4 (ДТ) и запоминали в блоке памяти 3 (БП).
Затем, используя блок коммутации 3 (БК), указанные выше обмотки статора отключали от источника постоянного напряжения 11 (ИПН) и замыкали их между собой, после чего происходило затухание тока. Организация данного процесса происходила по схеме, представленной на фиг.3, с помощью коммутации стоков и истоков первого 12, второго 13 и третьего 14 транзисторов, при этом стоки и истоки четвертого 15, пятого 16 и шестого 17 транзисторов были разомкнуты. В момент коммутации первого 12, второго 13 и третьего 14 транзисторов начиналось плавное затухание тока статора. Две составные части тока от параллельно соединенных обмоток статора В и С (не показана на фиг. 3) протекали к истокам замкнутых второго 13 и третьего 14 транзисторов. После прохождения стоков второго 13 и третьего 14 транзисторов две части тока объединились. Полученный ток проходил через сток, и исток замкнутого первого транзистора 12. Далее ток протекал по обмотке статора А, которая последовательно подключена к параллельно соединенным обмоткам В и С. Во время затухания тока измеряли и запоминали мгновенные величины тока в обмотке статора А, в которой ранее производили измерение установившегося значения тока с помощью датчика тока 4 (ДТ). Полученные значения передавали в блок памяти 2 (БП), откуда они поступали в блок вычисления целевой функции 8 (БВЦФ).
Одновременно из блока памяти 2 (БП) передавали данные в блок вычисления показательных функций 5 (БВПФ) и в блок вычисления вспомогательных функций 6 (БВВФ).
В блоке вычисления показательных функций 5 (БВПФ) определяли значение функций γ1( ,
,  ) и γ2(
) и γ2( ,
,  ), используя следующие выражения:
), используя следующие выражения:
где  - оценка индуктивности рассеяния обмотки статора и приведенной к статору обмотки ротора, Гн;
- оценка индуктивности рассеяния обмотки статора и приведенной к статору обмотки ротора, Гн;
 - оценка индуктивности главного контура намагничивания, Гн;
- оценка индуктивности главного контура намагничивания, Гн;
R1 - измеренное активное сопротивления обмотки статора, Ом;
R2' - приведенное к статору измеренное активное сопротивление обмотки ротора, Ом.
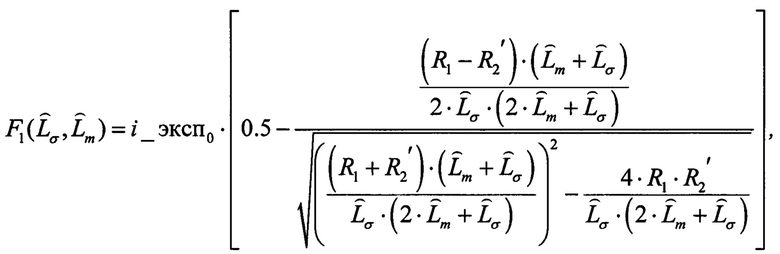
В блоке вычисления вспомогательных функций 6 (БВВФ) определяли значения функций F1( ,
,  ) и F2(
) и F2( ,
,  ) по следующим выражениям:
) по следующим выражениям:
где i_эксп0 - установившееся значение тока, измеренное в обмотке статора, А;
Полученные значения функций, определенные в блоке вычисления показательных функций 5 (БВПФ) и в блоке вычисления вспомогательных функций 6 (БВВФ), передали в блок настраиваемой регрессионной модели 7 (БНРМ), где определили мгновенные значения затухающего тока статора модели асинхронной машины на текущем шаге:

которые передали в блок вычисления целевой функции 8 (БВЦФ), где их запомнили и определили значение целевой функции двух переменных  ,
,  :
:

где Δt - период дискретизации, с которым производили измерение мгновенных значений затухающего тока обмотки статора, с;
n - текущий шаг расчета целевой функции S( ,
,  ), о.е.;
), о.е.;
m - общее количество измерений, произведенное при затухании тока обмотки статора, о.е.;
n⋅Δt=t - значение времени от момента начала затухания тока статора, с;
i_эксп(t) - мгновенные измеренные значения затухающего тока статора, А;
i_мод(t,  ,
, ) - мгновенные значения затухающего тока статора настраиваемой модели асинхронной машины с фазным ротором, А.
) - мгновенные значения затухающего тока статора настраиваемой модели асинхронной машины с фазным ротором, А.
Значение целевой функции S( ,
,  ) двух переменных
) двух переменных ,
,  поступало в блок минимизации целевой функции 9 (БМЦФ), где на основании этого значения с помощью алгоритма дифференциальной эволюции [Современные алгоритмы поисковой оптимизации. / Карпенко А.П. - Москва: Издательство МГТУ им. Н.Э. Баумана, 2014. - С. 114-117] определяли значения оценок индуктивности рассеяния обмотки статора, индуктивности рассеяния обмотки ротора, индуктивности главного контура намагничивания асинхронной машины с фазным ротором на текущем шаге расчета целевой функции. Алгоритм дифференциальной эволюции имел следующие параметры: сила мутации - 0,1 о.е., вероятность мутации - 0,1 о.е., число особей - 20 особей, максимальное число шагов расчета - 25 шагов, стратегия механизма мутации - rand/1/exp.
поступало в блок минимизации целевой функции 9 (БМЦФ), где на основании этого значения с помощью алгоритма дифференциальной эволюции [Современные алгоритмы поисковой оптимизации. / Карпенко А.П. - Москва: Издательство МГТУ им. Н.Э. Баумана, 2014. - С. 114-117] определяли значения оценок индуктивности рассеяния обмотки статора, индуктивности рассеяния обмотки ротора, индуктивности главного контура намагничивания асинхронной машины с фазным ротором на текущем шаге расчета целевой функции. Алгоритм дифференциальной эволюции имел следующие параметры: сила мутации - 0,1 о.е., вероятность мутации - 0,1 о.е., число особей - 20 особей, максимальное число шагов расчета - 25 шагов, стратегия механизма мутации - rand/1/exp.
Полученные значения оценок индуктивностей  ,
,  асинхронной машины передали в блок вычисления показательных функций 5 (БВПФ) и блок вычисления вспомогательных функций 6 (БВВФ), где в блоке вычисления показательных функций 5 (БВПФ) еще раз проводили определение значений функций γ1(
асинхронной машины передали в блок вычисления показательных функций 5 (БВПФ) и блок вычисления вспомогательных функций 6 (БВВФ), где в блоке вычисления показательных функций 5 (БВПФ) еще раз проводили определение значений функций γ1( ,
,  ) и γ2(
) и γ2( ,
,  ), а в блоке вычисления вспомогательных функций 6 (БВВФ) - определение значений функций F1(
), а в блоке вычисления вспомогательных функций 6 (БВВФ) - определение значений функций F1( ,
,  ) и F2(
) и F2( ,
,  ). Полученные значения передали в блок настраиваемой регрессионной модели 7 (БНРМ), где определяли мгновенные значения затухающего тока статора i_мод(t,
). Полученные значения передали в блок настраиваемой регрессионной модели 7 (БНРМ), где определяли мгновенные значения затухающего тока статора i_мод(t, ,
,  ) модели асинхронной машины на текущем шаге, которые передали в блок вычисления целевой функции 8 (БВЦФ), где определяли значение целевой функции S(
) модели асинхронной машины на текущем шаге, которые передали в блок вычисления целевой функции 8 (БВЦФ), где определяли значение целевой функции S( ,
,  ), которое поступало в блок минимизации целевой функции 9 (БМЦФ), где на основании этого значения с помощью алгоритма дифференциальной эволюции еще раз определяли значения оценок индуктивности рассеяния обмотки статора, индуктивности рассеяния обмотки ротора, индуктивности главного контура намагничивания асинхронной машины с фазным ротором на текущем шаге расчета целевой функции. Такое повторение продолжали до получения значения целевой функции S(
), которое поступало в блок минимизации целевой функции 9 (БМЦФ), где на основании этого значения с помощью алгоритма дифференциальной эволюции еще раз определяли значения оценок индуктивности рассеяния обмотки статора, индуктивности рассеяния обмотки ротора, индуктивности главного контура намагничивания асинхронной машины с фазным ротором на текущем шаге расчета целевой функции. Такое повторение продолжали до получения значения целевой функции S( ,
,  ), равного или меньшего установленного значения в блоке минимизации целевой функции 9 (БМЦФ), либо превышения максимального числа шагов расчета (25 шагов). Результаты определения параметров вывели на устройство вывода информации 10 (УВИ).
), равного или меньшего установленного значения в блоке минимизации целевой функции 9 (БМЦФ), либо превышения максимального числа шагов расчета (25 шагов). Результаты определения параметров вывели на устройство вывода информации 10 (УВИ).
Проверку правильности определения электромагнитных параметров асинхронной машины с фазным ротором осуществляли путем сравнения переходных процессов мгновенных значений затухающего тока статора i_мод(t,  ,
,  ) и мгновенных измеренных значений затухающего тока i_эксп(t) настраиваемой модели асинхронной машины с фазным ротором (фиг. 4). Для расчета переходных процессов использовали математическую модель в неподвижной жестко связанной со статором ортогональной системе координат αβ [Проектирование и исследование автоматизированных электроприводов. Часть 8. Асинхронный частотно-регулируемый электропривод/ Л.С. Удут, О.П. Мальцева, Н.В. Кояин. -Томск: Изд. ТПУ, 2000. - С. 21-25]. Из приведенного сравнения видно, что кривая мгновенных значений затухающего тока статора i_мод(t, , ) (фиг. 4) соответствует кривой мгновенных измеренных значений затухающего тока i_эксп(t) настраиваемой модели асинхронной машины с фазным ротором, а расхождение кривых составляет σ1=1,3%, следовательно, погрешность определения параметров незначительна.
) и мгновенных измеренных значений затухающего тока i_эксп(t) настраиваемой модели асинхронной машины с фазным ротором (фиг. 4). Для расчета переходных процессов использовали математическую модель в неподвижной жестко связанной со статором ортогональной системе координат αβ [Проектирование и исследование автоматизированных электроприводов. Часть 8. Асинхронный частотно-регулируемый электропривод/ Л.С. Удут, О.П. Мальцева, Н.В. Кояин. -Томск: Изд. ТПУ, 2000. - С. 21-25]. Из приведенного сравнения видно, что кривая мгновенных значений затухающего тока статора i_мод(t, , ) (фиг. 4) соответствует кривой мгновенных измеренных значений затухающего тока i_эксп(t) настраиваемой модели асинхронной машины с фазным ротором, а расхождение кривых составляет σ1=1,3%, следовательно, погрешность определения параметров незначительна.
Полученные значения индуктивности рассеяния обмоток статора и ротора равны  =0,1047Гн, а индуктивность главного контура намагничивания
=0,1047Гн, а индуктивность главного контура намагничивания  =0,003 Гн.
=0,003 Гн.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения частотной характеристики проводимости асинхронной машины | 1990 |
|
SU1780062A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2502079C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНЫХ ПАРАМЕТРОВ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2016 |
|
RU2623834C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНДУКТИВНОСТИ РАССЕЯНИЯ ФАЗЫ ОБМОТКИ СТАТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2422839C1 |
| Способ определения активных и индуктивных сопротивлений рассеяния обмотки ротора асинхронного двигателя | 1986 |
|
SU1372259A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2570363C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2012 |
|
RU2528612C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОЙ ИНДУКТИВНОСТИ ЦЕПИ НАМАГНИЧИВАНИЯ ЧАСТОТНО-РЕГУЛИРУЕМОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2420748C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2447573C1 |
| БЕЗДАТЧИКОВАЯ СИСТЕМА БЕЗОПАСНОСТИ ДЛЯ ОПРЕДЕЛЕНИЯ ВРАЩЕНИЯ БАРАБАНА ДЛЯ БЕЛЬЯ БЫТОВОГО ЭЛЕКТРОПРИБОРА С ПРИВОДОМ ОТ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2519908C2 |
Изобретение относится к электротехнике, а именно к определению электромагнитных параметров асинхронных машин с фазным ротором. Сущность: сначала соединяют в звезду статорные и роторные обмотки при неподвижном выходном вале. Затем измеряют активное сопротивление двух последовательно включенных обмоток статора и определяют приведенное к статору активное сопротивление ротора. После этого роторные обмотки замыкают между собой, постоянное напряжение подают в контур из двух параллельно соединенных обмоток статора и последовательно с ними включенной третьей обмоткой до достижения током установившегося значения, которое измеряют и запоминают. Затем статорные обмотки отключают от источника постоянного напряжения и замыкают между собой, вызывая затухание тока, во время которого измеряют и запоминают мгновенные значения затухающего тока в указанной третьей обмотке. Полученные мгновенные значения токов используют для определения индуктивности рассеяния статорной и роторной обмоток, индуктивности главного контура намагничивания асинхронной машины. Технический результат: увеличение числа определяемых электромагнитных параметров асинхронной машины. 4 ил.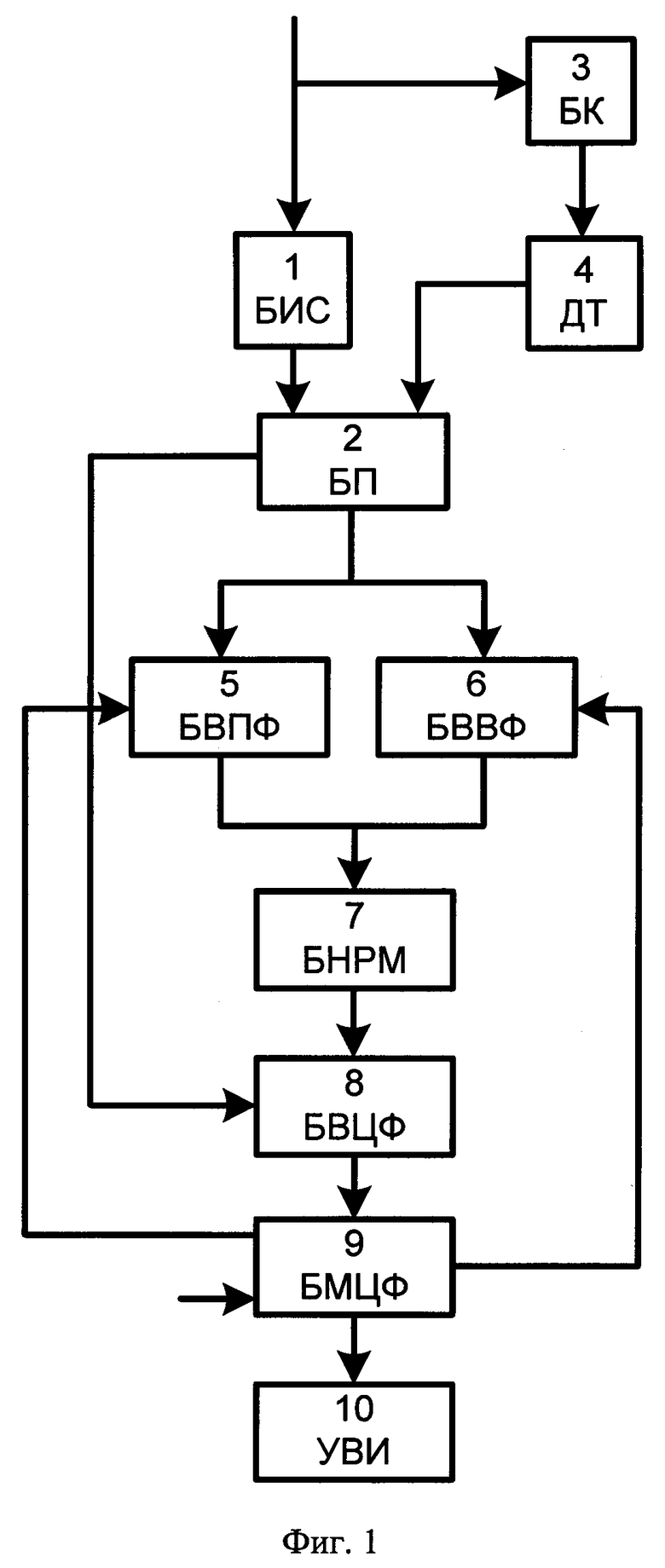
Способ определения электромагнитных параметров асинхронной машины с фазным ротором, включающий измерение тока в обмотке статора и определение значения индуктивности рассеивания фазы обмотки статора, отличающийся тем, что сначала соединяют в звезду статорные и роторные обмотки при неподвижном выходном вале, измеряют активное сопротивление двух последовательно включенных обмоток статора и определяют сопротивление обмотки статора, далее измеряют активное сопротивление двух последовательно включенных обмоток ротора и определяют приведенное к статору активное сопротивление ротора, после чего роторные обмотки замыкают между собой, постоянное напряжение подают в контур из двух параллельно соединенных обмоток статора и последовательно с ними включенной третьей обмоткой до достижения током установившегося значения, которое измеряют и запоминают, затем статорные обмотки отключают от источника постоянного напряжения и замыкают между собой, вызывая затухание тока, во время которого измеряют и запоминают мгновенные значения затухающего тока в указанной третьей обмотке, полученные мгновенные значения токов используют для определения индуктивности рассеяния, величина которой принята равной для статорной и роторной обмоток, индуктивности главного контура намагничивания асинхронной машины с фазным ротором путем минимизации целевой функции двух переменных  ,
,  :
:

где  - оценка искомой индуктивности рассеяния обмотки статора и приведенной к статору обмотки ротора, Гн;
- оценка искомой индуктивности рассеяния обмотки статора и приведенной к статору обмотки ротора, Гн;
 - оценка искомой индуктивности главного контура намагничивания;
- оценка искомой индуктивности главного контура намагничивания;
Δt - период дискретизации, с которым производят измерение мгновенных значений затухающего тока обмотки статора, с;
n - текущий шаг расчета целевой функции S( ,
,  ), о.е.;
), о.е.;
m - общее количество измерений, произведенных при затухании тока обмотки статора, о.е.;
n⋅Δt=t - значение времени от момента начала затухания тока статора, с;
i_эксп(t) - мгновенные измеренные значения затухающего тока статора, А;
i_мод(t,  ,
,  ) - мгновенные значения затухающего тока статора настраиваемой модели асинхронной машины с фазным ротором, А, определяемые из выражения:
) - мгновенные значения затухающего тока статора настраиваемой модели асинхронной машины с фазным ротором, А, определяемые из выражения:

где
где i_эксп0 - установившееся значение тока, измеренное в обмотке статора, А;
R1 - измеренное активное сопротивление обмотки статора, Ом;
R2 - приведенное к статору измеренное активное сопротивление обмотки ротора, Ом.
| Устройство для формования сердечников напорных железобетонных труб | 1962 |
|
SU151954A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНЫХ ПАРАМЕТРОВ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2016 |
|
RU2623834C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ И РАБОЧИХ ХАРАКТЕРИСТИК АСИНХРОННОГО ДВИГАТЕЛЯ БЕЗ СОПРЯЖЕНИЯ С НАГРУЗОЧНЫМ УСТРОЙСТВОМ | 2008 |
|
RU2391680C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2570363C1 |
| CN 1157845 C, 14.07.2004 | |||
| DE 3034275 A1, 22.04.1982. | |||

