Изобретение относится к области гидроакустической техники и может быть использовано для решения задач пассивного определения координат шумящего в море объекта, а именно дистанции, глубины и пеленга при распространении гидроакустических сигналов в море.
Известные способы измерения дальности до источника шумоизлучения могут быть разделены на следующие группы. К первой группе относятся способы, основанные на многопозиционном приеме и пеленговании источника несколькими приемными позициями (триангуляционный или угломерный способ), либо измерении разностей расстояний от источника до приемных позиций (разностно-дальномерный способ), либо комбинации указанных двух способов (угломерно-разностно-дальномерный способ) (В.В. Караваев, В.В. Сазонов. Статическая теория пассивной локации. М.: Радио и связь, 1987, р. 5.4.).
Ко второй группе относятся способы, основанные на анализе кривизны фронта волны полезного сигнала (см. цитированную книгу В.В. Караваева, р. 5.1, а также "Подводная акустика и обработка сигналов", под ред. Л. Бьерне. М.: Мир, 1985, стр. 325-328 и стр. 415-418).
Недостатком указанных способов является необходимость либо наличия нескольких существенно разнесенных в пространстве приемных позиций, либо наличия приемной антенны с очень большой апертурой - при условии сохранения когерентности полезного сигнала по фронту в пределах всей апертуры антенны. Следствиями указанных факторов являются высокие затраты на реализацию способа измерения дальности или/и относительно низкая точность измерения.
Известен способ определения дистанции в режиме шумопеленгования, основанный на приеме звукового давления и колебательной скорости с последующим образованием взаимной корреляции между ними, при этом дисперсионные характеристики среды при распространении звуковой энергии (фазовая и групповая скорости) в ограниченной среде (волноводе) определяются через функции взаимной корреляции в каждом канале, а определенные таким образом скорости распространения и время запаздывания между звуковым давлением и колебательной скоростью дают возможность найти искомое расстояние до источника излучения. (Авт. св-во СССР №54232, МПК G01S 7/52, 1968 г.).
Недостатком этого способа является то, что он не обладает помехоустойчивостью по отношению к собственным шумам корабля-носителя, поскольку при определении скоростей распространения в каждом из каналов собственные шумы при движении корабля воздействуют на приемную антенну и не происходит отстройки от них.
Известен способ определения дистанции в режиме шумопеленгования, обеспечивающий повышение помехоустойчивости за счет уменьшения влияния собственных помех корабля-носителя на определение дистанции при сохранении скрытности. В этом способе используют два пространственных канала, компенсируют время запаздывания между отдельными модами в этих каналах, вводя искусственное время задержки в заданной полосе, складывают сигналы, получая интерференционную структуру между этими сигналами, при движении корабля-носителя измеряют пространственный масштаб когерентности, т.е. расстояние, соответствующее затуханию огибающей интерференционной структуры в  раз, и период интерференции, то есть расстояние между двумя соседними максимумами (Патент РФ №1840066, МПК G01S 7/52, от 13.06.1977 г.).
раз, и период интерференции, то есть расстояние между двумя соседними максимумами (Патент РФ №1840066, МПК G01S 7/52, от 13.06.1977 г.).
Недостатком способа является невозможность определения глубины расположения источника шума. Кроме этого необходимо выделять отдельные моды, для чего требуется очень большие антенны, чей вертикальный размер близок к глубине моря в точке приема.
Известен также спектрально-частотный способ измерения дальности до источника шумоизлучения, основанный на использовании частотной зависимости пространственного затухания и поглощения сигнала в морской среде от дальности. По этому способу осуществляют прием смеси сигнала шумоизлучения и помехи, измерение частотного спектра смеси принятого сигнала шумоизлучения и помехи, реализуется предварительное формирование набора прогнозируемых спектров сигнала шумоизлучения в точке приема для заранее выбранных сочетаний дальности и параметров наклона частотного спектра сигнала шумоизлучения, вычисление опорного спектра по каждому из прогнозируемых спектров набора, вычисление величины функциональной корреляции между измеренной смесью принятого сигнала шумоизлучения и помехи и каждым опорным спектром из набора, а подбор гипотетического значения дальности осуществляется путем определения максимальной величины функциональной корреляции, при которой гипотетическое значение дальности принимается истинным. Способ работоспособен при нахождении объектов в ближней зоне акустической освещенности и малодостоверен в дальней зоне акустической освещенности из-за влияния явления вертикальной рефракции звука на форму спектра, а также из-за влияния изменения величины пространственного затухания, зависящей от района использования способа, и влияния изменения спектра помехи в зависимости от состояния водной поверхности. (Патент РФ 2128848, МПК от 09.10.97 г.).
Известен способ измерения дистанции, в соответствии с которым с помощью автокорреляционной функции сигнала можно определить расстояние до цели в пассивном режиме при многолучевом распространении в ближней зоне акустической освещенности. По этому способу звуковой сигнал принимают антенной, которая предполагается ненаправленной в вертикальной плоскости и не различает углы прихода сигнала в вертикальной плоскости, но различает время межлучевого запаздывания сигнала, широкополосный сигнал с выхода приемной антенны подают на коррелятор, вычисляют автокорреляционную функцию принимаемого многолучевого сигнала, выделяют корреляционный максимум, измеряют время межлучевой задержки и вычисляют разность длин двух траекторий лучей по известной скорости звука. Вычисляют горизонтальное расстояние до цели по вычисленной разности длин траекторий, известной глубине моря и глубине погружения приемной антенны (B.C. Бурдик "Анализ гидроакустических систем. Пер. с англ. Л.: Судостроение, 1988 г., стр. 377).
Недостаток способа заключается в том, что он не учитывает влияния вертикальной рефракции звука и чрезвычайно сильно зависит от фактических гидроакустических условий и возможности прогноза тонкой многолучевой структуры (с точностью до фазы сигнала) и не позволяет получить сведений о скорости шумящих объектов.
Наиболее близким по технической сущности и достигаемому результату к изобретению (прототипом) является известный способ пассивного определения координат шумящего в море объекта, по которому принимают гидроакустические сигналы первичного поля шумящего в море объекта, проводят частотно-временную обработку принятых гидроакустических сигналов, приходящих под различными углами из-за вертикальной рефракции звука, измеряют скорость звука в воде в зависимости от глубины и волнения поверхности моря, по измеренным данным и известным характеристикам дна рассчитывают сигнал шумящего объекта, решают уравнение гидроакустики в пассивном режиме для шумящего в море объекта, причем для определения дистанции до шумящих в море объектах используют наблюдение сигнала в трех пространственных каналах (под пространственными каналами подразумевается прием в отдельных лепестках вертикального статического веера ХН), приходящего под разными углами из-за вертикальной рефракции звука. Затем по измеренной скорости звука в воде в зависимости от глубины и волнения поверхности моря, а также по известным характеристикам дна и известным характеристикам приемной системы рассчитывают сигнал объекта в каждом пространственном канале для нескольких значений расстояния, решая уравнение гидроакустики в пассивном режиме, и в результате сравнения измеренных значений сигнала с расчетными принимают решение о дистанции и скорости и о наличии нескольких шумящих объектов на одном направлении. (Патент RU 2208811, МПК G01S 11/14, от 27.09.2001 г.).
Недостатком прототипа является низкая точность определения координат шумящего объекта, вызванная тем, что в каждый пространственный канал может приходить несколько сигналов, распространяющихся по отдельным лучевым траекториям, чья интерференция не позволяет рассчитывать сигнал с приемлемой точностью, а также неопределенность при вычислении задержек сигналов, вызванная наличием нескольких точек пересечения лучевых траекторий.
Техническим результатом изобретения является повышение точности определения координат шумящего объекта за счет устранения неопределенности при вычислении задержек сигналов, а также проведения измерений отношений энергий сигналов, распространяющихся по отдельным лучевым траекториям в вертикальной плоскости с одного пеленга.
Технический результат достигается за счет того, что в способе пассивного определения координат шумящего в море объекта, по которому принимают гидроакустические сигналы поля шумящего в море объекта, проводят частотно-временную обработку принятых гидроакустических сигналов, приходящих под различными углами из-за вертикальной рефракции звука, измеряют скорость звука в воде в зависимости от глубины и волнение поверхности моря, по измеренным данным и известным характеристикам дна рассчитывают сигнал шумящего объекта, решают уравнение гидроакустики в пассивном режиме для шумящего в море объекта, прием гидроакустических сигналов осуществляют пространственно развитой в вертикальной и горизонтальной плоскостях антенной, эти сигналы предварительно усиливают и фильтруют в полосе частот, после чего сигналы оцифровывают, проводят пространственно-временную обработку сигналов, проводят взаимнокорреляционную обработку не менее одной пары сигналов в вертикальной плоскости, выделяют пары сигналов с высокими значениями максимума взаимнокорреляционной функции, проводят измерения углов прихода этих сигналов, распространяющихся по отдельным лучевым траекториям в вертикальной плоскости, измеряют разность времен распространения по положению максимума взаимнокорреляционной функции на временной оси, а также измеряют отношение усредненных значений энергий для каждой пары сигналов, после чего от точки расположения приемной антенны рассчитывают лучевые траектории для измеренных углов прихода сигналов в вертикальной плоскости для пар сигналов с высокими значениями максимума взаимнокорреляционной функции и ищут дистанции и глубины точек пересечения траекторий, затем в каждой точке пересечения траекторий для всех пар сигналов, распространяющихся по этим лучевым траекториям, рассчитывают разности времен распространения и отношение энергий, сравнивают измеренные и рассчитанные разности времен распространения и отношений усредненных значений энергий для всех пар сигналов, а координаты шумящего в море объекта определяют по точке пересечения лучевых траекторий, для которых оказываются наиболее близкими измеренные и рассчитанные значения отношений энергий и разностей времен распространения для всех пар сигналов, распространяющихся по отдельным лучевым траекториям.
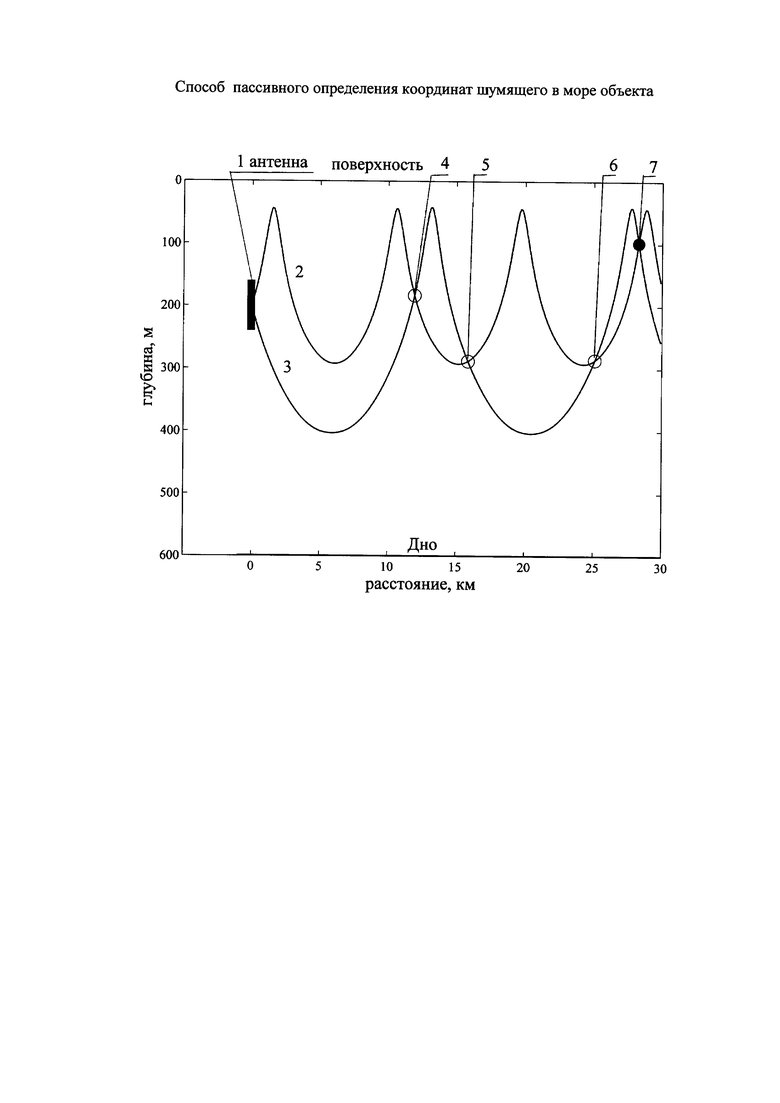
Сущность изобретения поясняется чертежом, на котором представлен пример лучевых траекторий и точек их пересечения для измеренных углов прихода одной пары гидроакустических сигналов. На чертеже показано расположение приемной вертикальной антенны 1 в морском волноводе и приведены две лучевые траектории 2 и 3, по которым приходят сигналы от шумящего в море объекта. Для определения расположения объекта сначала находят точки пересечения лучевых траекторий 4, 5, 6, 7. Затем проводят специальную обработку полученных материалов и сравнение измеренных и рассчитанных значений отношений энергий и разностей времен прихода сигналов. В результате принимается решение: объект находится в точке 7.
Способ основан на приеме гидроакустических сигналов пространственно развитой в вертикальной и горизонтальной плоскостях антенной и реализуется следующим образом. Сигналы с антенны 1 предварительно усиливают и фильтруют в заданной полосе частот, после чего сигналы оцифровывают для проведения дальнейшей цифровой обработки сигналов. Затем проводят пространственно-временную обработку сигналов. Кроме того, формируют статический веер главных лепестков характеристики направленности (ХН), позволяющий измерять углы прихода сигналов в вертикальной и горизонтальной плоскостях. Размер антенны в горизонтальной и вертикальной плоскостях должен быть таким, чтобы обеспечивать заданную точность определения углов прихода сигналов в горизонтальной (для определения пеленга) и в вертикальной (для определения дистанции и глубины) плоскостях. Размер антенны при заданной частоте и ширине каждого лепестка ХН многолепестковой антенны можно определить по формуле:
где h - размер антенны в метрах,  - частота в кГц, α - ширина лепестков ХН в градусах по уровню - 3 дБ.
- частота в кГц, α - ширина лепестков ХН в градусах по уровню - 3 дБ.
Нижняя частота полосы, в которой проводится фильтрация сигналов, выбирается близкой к оптимальной частоте для заданного диапазона рабочих расстояний:
где - оптимальная частота в кГц, R - расстояние в километрах.
Ширина полосы частот выбирается, исходя из требуемой точности оценки временных задержек с помощью взаимнокорреляционной функции. Поскольку ширина корреляционного максимума примерно равна обратной величине ширины полосы сигнала, то при требуемой обычно точности оценки временных задержек 0.5-1 мс, ширина полосы сигнала должна составлять не менее 1-2 кГц.
Ширина рабочих лепестков ХН в вертикальной плоскости, как показывает экспериментальный опыт, при работе на дистанциях до 10 км не должна превышать 2÷4° и 2° на больших дистанциях. Таким образом, например, если задана рабочая дальность 25 км, то по формуле (2) получаем оценку для оптимальной частоты 4 кГц, а высота антенны по формуле (1) будет равна 9.4 м. На практике, максимальный вертикальный размер антенны, как правило, ограничен (не более 10 м), в этом случае можно работать на частотах выше оптимальной частоты для обеспечения требуемой ширины каждого лепестка ХН 2°.
Для определения координат шумового источника звука необходимо принимать с одного пеленга не менее двух сигналов этого источника, распространяющихся по отдельным лучевым траекториям в вертикальной плоскости (см. чертеж). Для проведения дальнейших измерений необходимо, чтобы сигналы приходили в разные лепестки статического веера ХН в вертикальной плоскости. Принадлежность этих сигналов одному источнику звука определяется с помощью вычисления взаимнокорреляционной функции между парами сигналов. Для этого проводят взаимнокорреляционную обработку не менее одной пары сигналов в вертикальной плоскости, выделяют пары сигналов с высокими значениями максимума взаимнокорреляционной функции, проводят измерения углов прихода этих сигналов, распространяющихся по отдельным лучевым траекториям в вертикальной плоскости, измеряют разность времен распространения по положению максимума взаимнокорреляционной функции на временной оси. Высокие значения максимума взаимнокорреляционной функции подтверждают принадлежность этих сигналов к одному источнику звука, а также сам факт распространения этих сигналов по отдельным лучевым траекториям. В общем случае, допустимо попадание в лепесток нескольких сигналов, распространяющихся по отдельным лучевым траекториям, при условии, что энергия одного из этих сигналов значительно больше, чем энергия всех остальных сигналов, попадающих в этот лепесток, вследствие чего именно этот сигнал определяет взаимнокорреляционную функцию.
Для пар сигналов с высокими значениями максимума взаимнокорреляционной функции проводятся измерения углов прихода сигналов в вертикальной плоскости, разности времен распространения равной положению максимума взаимнокорреляционной функции на временной оси, а также измеряют отношение усредненных значений энергий для каждой пары сигналов.
Далее от точки расположения приемной антенны рассчитывают лучевые траектории для измеренных углов прихода сигналов в вертикальной плоскости для пар сигналов с высокими значениями максимума взаимнокорреляционной функции и находят дистанции и глубины точек пересечения траекторий, затем в каждой точке пересечения траекторий для всех пар сигналов, распространяющихся по этим лучевым траекториям, рассчитывают разности времен распространения и отношение энергий, сравнивают измеренные и рассчитанные разности времен распространения и отношений усредненных значений энергий для всех пар сигналов, а координаты шумящего в море объекта определяют по точке пересечения лучевых траекторий, для которых оказываются наиболее близкими измеренные и рассчитанные значения отношений энергий и разностей времен распространения для всех пар сигналов, распространяющихся по отдельным лучевым траекториям.
Если измерена только одна пара сигналов, то точек пересечения их лучевых траекторий несколько. В этом случае, выбор точки пересечения, соответствующей истинному расположению источника звука, производится путем сравнения измеренных и рассчитанных разностей времен распространения и отношений энергий пары сигналов. За точку расположения источника звука принимается та точка пересечения лучевых траекторий, для которой оказываются наиболее близкими измеренные и рассчитанные значения отношений энергий и разностей времен распространения пары сигналов, приходящих по отдельным лучевым траекториям. Т.е., координаты точки пересечения лучевых траекторий, которой соответствует минимум функции В, рассчитанной по формуле (3), соответствуют координатам шумящего в море объекта:

где ΔTe - измеренная разность времен распространения для пары сигналов, ΔTc - рассчитанная разность времен распространения для пары сигналов, Ee - измеренное отношение энергий для пары сигналов, Ec - рассчитанное отношение энергий для пары сигналов.
Если было найдено несколько пар сигналов с высокими значениями максимума взаимнокорреляционной функции, то координаты единственной точки пересечения их лучевых траекторий соответствуют координатам шумящего в море объекта.
При проведении расчетов предполагается, что известна глубина приемной антенны, а для трассы распространения звука, идущей от приемника по измеренному предварительно пеленгу, известны: профиль скорости звука, рельеф дна, акустические свойства дна и волнение морской поверхности, знание которых позволяет рассчитывать лучевые траектории, времена распространения и энергии сигналов. Если нет возможности измерить профиль скорости звука и волнение морской поверхности, их можно брать из климатических баз данных. Рельеф дна и акустические свойства дна извлекаются из соответствующих баз данных.
При наличии на одном пеленге нескольких источников шумовых сигналов задача определения их координат решается последовательно. При этом основным критерием принадлежности к одному шумовому источнику сигналов, распространяющихся по отдельным лучевым траекториям в вертикальной плоскости и приходящих в разные лепестки вертикального статического веера ХН, остается высокое значение максимума взаимнокорреляционной функции этих сигналов.
Отдельно стоит сказать о возможности измерения предлагаемым способом параметров движения источника шумовых сигналов. Это возможно, поскольку измеряется дистанция и глубина источника сигналов. Таким образом, используя последовательные измерения дистанции и глубины источника сигналов, можно определять направление и величину скорости в горизонтальной и вертикальной плоскости. Т.е. предлагаемый способ позволяет определять координаты и параметры движения объекта, т.е. полностью решать задачу шумопеленгования.
Изобретение позволяет существенно повысить точность определения координат шумящего объекта за счет устранения неопределенности при вычислении задержек сигналов, обеспечения измерения углов прихода в точку приема, а также проведения измерений разностей времен распространения и отношений усредненных значений энергий для сигналов, распространяющихся по отдельным лучевым траекториям в вертикальной плоскости с одного пеленга.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ пассивного определения координат шумящего в море объекта | 2021 |
|
RU2764386C1 |
| Способ определения координат шумящих объектов с использованием вертикально развитых опускаемых разворачивающихся звукопрозрачных антенн гидроакустических комплексов | 2024 |
|
RU2831710C1 |
| Способ пассивного определения координат шумящего в море объекта | 2022 |
|
RU2797780C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩИХ МОРСКИХ ОБЪЕКТОВ | 2022 |
|
RU2810106C2 |
| Способ определения координат шумящих объектов с использованием вертикально развитых бортовых антенн гидроакустических комплексов | 2023 |
|
RU2820807C1 |
| Способ определения глубины погружения шумящего в море объекта | 2023 |
|
RU2816481C1 |
| Способ получения информации о подводном шумящем объекте | 2022 |
|
RU2803528C1 |
| Способ локализации в пространстве шумящего в море объекта | 2022 |
|
RU2788341C1 |
| Способ определения координат морской шумящей цели | 2022 |
|
RU2798416C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
Изобретение относится к области гидроакустической техники и может быть использовано для решения задач пассивного определения координат шумящего в море объекта, а именно, дистанции, глубины и пеленга при распространении гидроакустических сигналов в море. Техническим результатом изобретения является повышение точности определения координат шумящего объекта за счет устранения неопределенности при вычислении задержек сигналов, а также проведение измерений отношений энергий сигналов, распространяющихся по отдельным лучевым траекториям в вертикальной плоскости с одного пеленга. Технический результат достигается за счет того, что в способе пассивного определения координат шумящего в море объекта, по которому принимают гидроакустические сигналы поля шумящего в море объекта, проводят частотно-временную обработку принятых гидроакустических сигналов, приходящих под различными углами из-за вертикальной рефракции звука, измеряют скорость звука в воде в зависимости от глубины и волнение поверхности моря, по измеренным данным и известным характеристикам дна рассчитывают сигнал шумящего объекта, решают уравнение гидроакустики в пассивном режиме для шумящего в море объекта, прием гидроакустических сигналов осуществляют пространственно развитой в вертикальной и горизонтальной плоскостях антенной, эти сигналы предварительно усиливают и фильтруют в полосе частот, после чего сигналы оцифровывают, проводят пространственно-временную обработку сигналов, проводят взаимнокорреляционную обработку не менее одной пары сигналов в вертикальной плоскости, выделяют пары сигналов с высокими значениями максимума взаимнокорреляционной функции, проводят измерения углов прихода этих сигналов, распространяющихся по отдельным лучевым траекториям в вертикальной плоскости, измеряют разность времен распространения по положению максимума взаимнокорреляционной функции на временной оси, а также измеряют отношение усредненных значений энергий для каждой пары сигналов, после чего от точки расположения приемной антенны рассчитывают лучевые траектории для измеренных углов прихода сигналов в вертикальной плоскости для пар сигналов с высокими значениями максимума взаимнокорреляционной функции и находят дистанции и глубины точек пересечения траекторий, затем в каждой точке пересечения траекторий для всех пар сигналов, распространяющихся по этим лучевым траекториям, рассчитывают разности времен распространения и отношение энергий, сравнивают измеренные и рассчитанные разности времен распространения и отношений усредненных значений энергий для всех пар сигналов, а координаты шумящего в море объекта определяют по точке пересечения лучевых траекторий, для которой оказываются наиболее близкими измеренные и рассчитанные значения отношений энергий и разностей времен распространения для всех пар сигналов, распространяющихся по отдельным лучевым траекториям. 1 ил.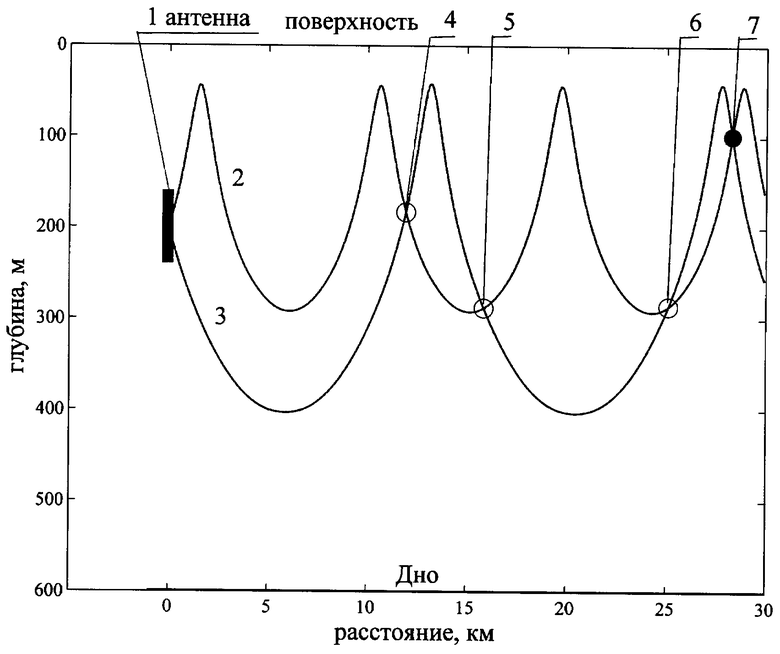
Способ пассивного определения координат шумящего в море объекта, по которому принимают гидроакустические сигналы поля шумящего в море объекта, проводят частотно-временную обработку принятых гидроакустических сигналов, приходящих под различными углами из-за вертикальной рефракции звука, измеряют скорость звука в воде в зависимости от глубины и волнение поверхности моря, по измеренным данным и известным характеристикам дна рассчитывают сигнал шумящего объекта, решают уравнение гидроакустики в пассивном режиме для шумящего в море объекта, отличающийся тем, что прием гидроакустических сигналов осуществляют пространственно развитой в вертикальной и горизонтальной плоскостях антенной, эти сигналы предварительно усиливают и фильтруют в полосе частот, после чего сигналы оцифровывают, проводят пространственно-временную обработку сигналов, проводят взаимнокорреляционную обработку не менее одной пары сигналов в вертикальной плоскости, выделяют пары сигналов с высокими значениями максимума взаимнокорреляционной функции, проводят измерения углов прихода этих сигналов, распространяющихся по отдельным лучевым траекториям в вертикальной плоскости, измеряют разность времен распространения по положению максимума взаимнокорреляционной функции на временной оси, а также измеряют отношение усредненных значений энергий для каждой пары сигналов, после чего от точки расположения приемной антенны рассчитывают лучевые траектории для измеренных углов прихода сигналов в вертикальной плоскости для пар сигналов с высокими значениями максимума взаимнокорреляционной функции и находят дистанции и глубины точек пересечения траекторий, затем в каждой точке пересечения траекторий для всех пар сигналов, распространяющихся по этим лучевым траекториям, рассчитывают разности времен распространения и отношение энергий, сравнивают измеренные и рассчитанные разности времен распространения и отношений усредненных значений энергий для всех пар сигналов, а координаты шумящего в море объекта определяют по точке пересечения лучевых траекторий, для которой оказываются наиболее близкими измеренные и рассчитанные значения отношений энергий и разностей времен распространения для всех пар сигналов, распространяющихся по отдельным лучевым траекториям.
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2007 |
|
RU2339050C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСТАНЦИИ ДО ИСТОЧНИКА ИЗЛУЧЕНИЯ В РЕЖИМЕ ШУМОПЕЛЕНГОВАНИЯ | 1977 |
|
SU1840066A1 |
| US5805525 A1, 08.09.1998. | |||

